从理想星环OS 看机器人网络进化路线(附下载链接)
欢迎关注 机器人合集
- 汽车进化史
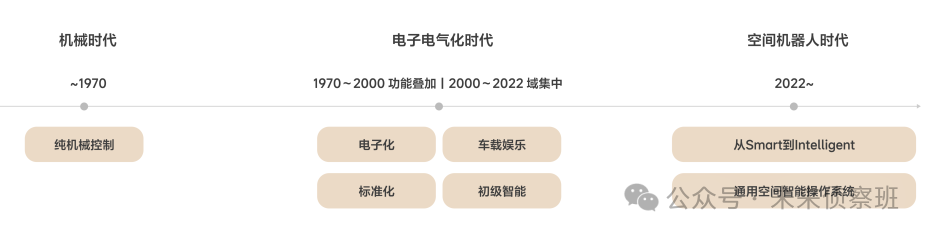
140年世界汽车发展史,从蒸汽机、内燃机到新能源;手动档、自动档到自动驾驶...

从纯机械时代,当前的电气化时代,到未来的空间智能时代...
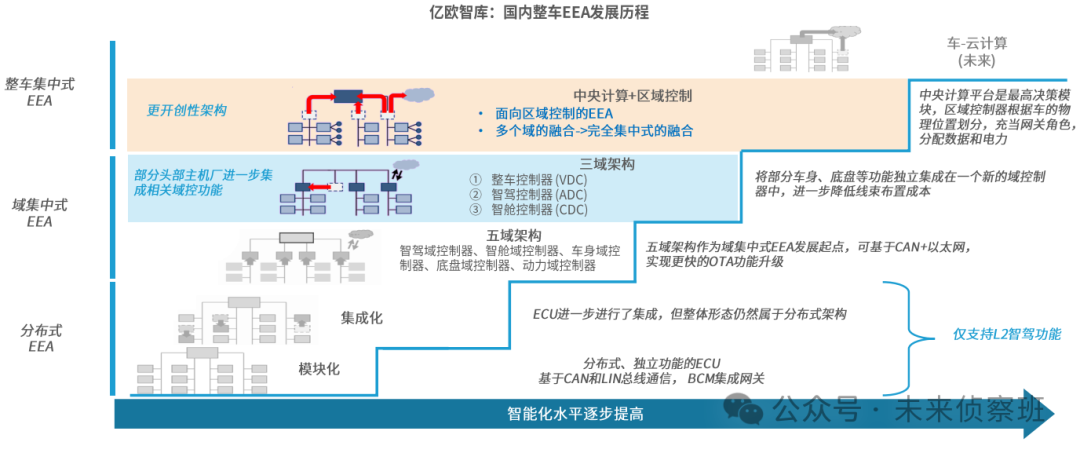
电气时代EEA电子电气架构英文全称Electrical / Electronic Architecture,各个子模块组成整车顶层设计架构,可以细分三个阶段,通信带宽也从Mbps、10Mbps、100Mbps再到1Gbps:
-
分布式EEA:分布式CAN/LIN总线,各个ECU实现独立功能;
-
域集中式EEA:智驾域、智舱域和整车域;将车身、底盘等硬件强相关一体化并和软件控制等分开;
-
整车集中式EEA:进一步一体化,整车软硬一体,由统一的中央控制;甚至未来发展成由云端AI的车云一体。
- 智能汽车通信架构
以理想汽车架构EEA1.0~3.0进化为例,中央化趋势明显。本文以开源星环OS为背景详细解读。
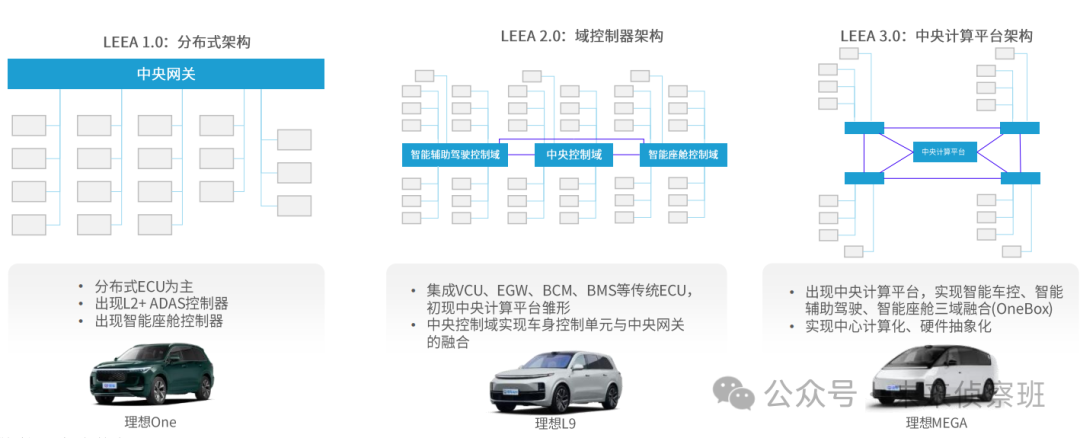
硬件部分由瑞萨、英飞凌、NXP等车规级MCU,英伟达Thor、地平线等高算力芯片;由实时操作系统RTOS、非实时Linux、虚拟化等多平台支撑底层操作系统;中间层则是通信中间件,实现自动驾驶和智能车控与硬件间的通信。

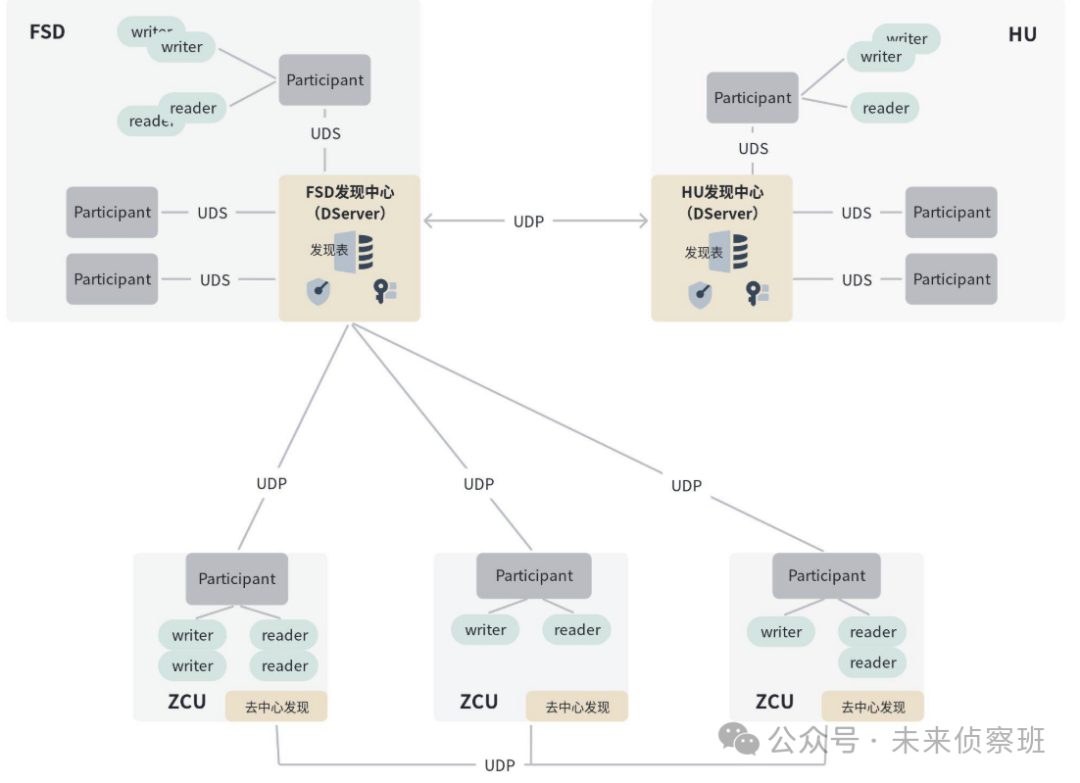
通信中间件详细拆解如下图,顶层是两大块业务:
- Pub/Sub订阅发布:以DDS为基础实现服务发布订阅功能,实现和底层硬件解耦,如常见的Fastdds、cycloneDDS以及ROS框架等等。熟悉蓝牙BLE Notification通知机制的朋友看到这里就会有种似曾相识的感觉。
- Server/Client RPC通信:Remote Procedure Call远程调用,以C/S架构形式实现双方通信及调用需求。
接着是网络安全层公共组件,底层则是传统的网络通信如Ethernet、CAN/fd、内存共享shm等,也会涉及到LIN、TSN时间敏感网络等前沿通信技术机器人网络 TSN时间敏感网络。从而实现OS内通信,跨OS通信甚至车云通信。

通信性能也从最初的1Mbps扩大到最高1Gbps,时延直接跃迁到μs微秒级别,拓扑结构最初的星型结构进化成冗余网络,大大提高网络拓扑的容错能力。
对外统一封装成VBS API层,内部则是采用最佳自适应传输决策,决策通信具体的策略:UDP+PRTS优化原始的FastDDS方案、私有自研的内存共享方案以及PCIE等其他协议通信。
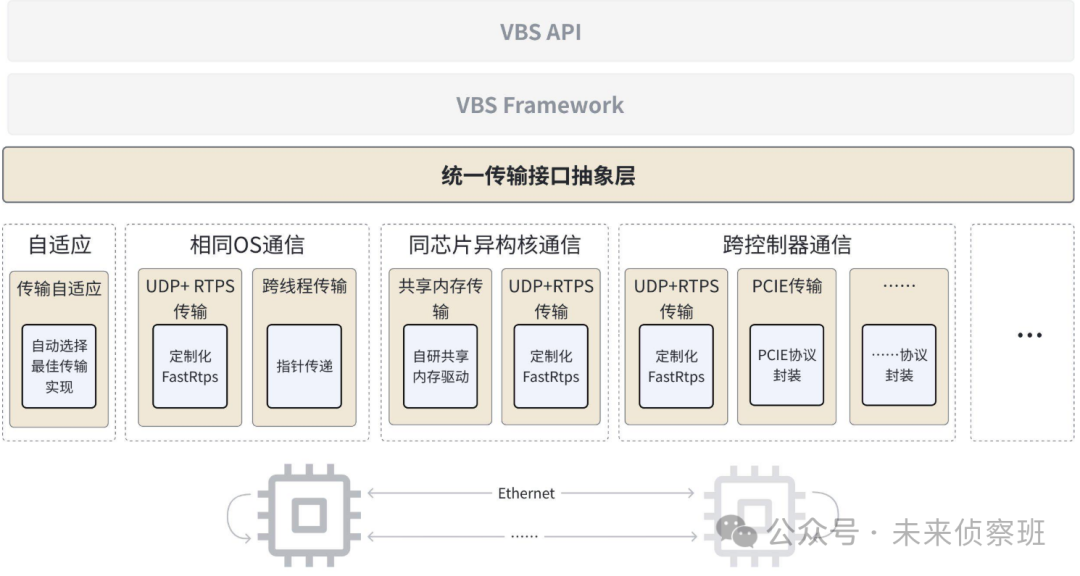
底层实现的冗余链路设计增加系统通信健壮性,并且应用层的收发双方仅需要处理业务层数据,而无需管理冗余链路和数据。

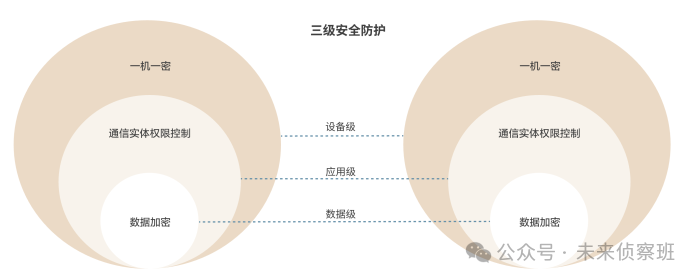
星环OS的三级防护从设备级、应用级和数据级为用户提供全方位的安全保障。
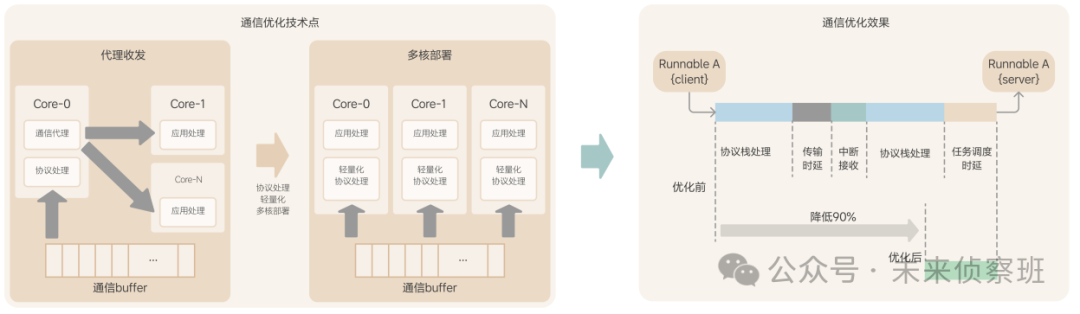
通过确定性网络、轻量级协议栈以及协议多核部署,将端到端的通信时延减少90%
理想星环OS 1.0开源路标2025.4开始直到现在开源整个系统及代码释放,值得一提的是虚拟化引擎部分智驾领域属于前沿应用,虚拟化笼统简单解释就是更深度定制的虚拟机,完全隔离软件和硬件,避免软件服务异常引起硬件崩溃。


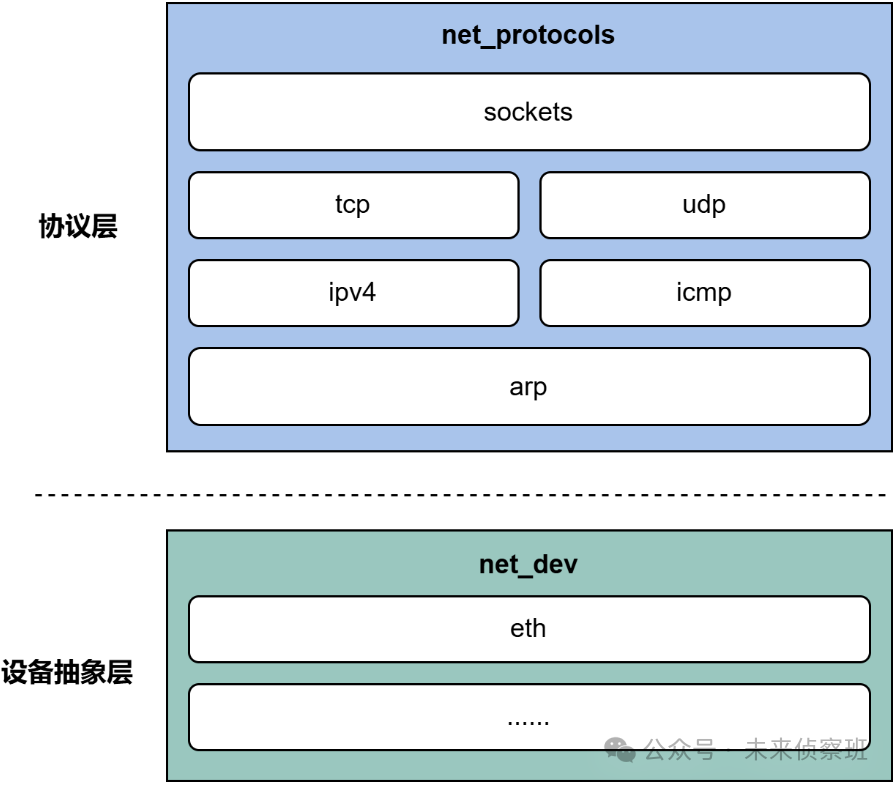
私有的网络拓扑依然和OSI架构基本类似,按照逻辑分为设备抽象层和协议层。
- 机器人EEA展望
机器人EEA架构自身线束链路短,并且对于稳定性要求更加严苛等特点,网络拓扑结构会更加复杂,CAN、LIN、现场总线、Ethercat、TSN、Ethernet以及5G等都会涉及;目前是在快速试错阶段,业界形成成熟的统一的成熟方案仍需一段时间迭代。
星环OS资料链接:
https://p.ampmake.com/lilibrary/804134815615691/b64f710d-8c32-48ce-ba30-fd2bdde68acb.0.pdf

详见如上附件链接...
关注
往期文章