摘要
ZeroMQ(ØMQ/0MQ)作为一款高性能、异步的消息传递库,在分布式系统通信中表现出卓越的性能和灵活性。本文将深入探讨ZeroMQ在雷达电子战仿真中的实际应用,从基础概念到高级特性,从简单示例到复杂架构,全面解析如何利用ZeroMQ构建高效、可靠的分布式雷达仿真系统。我们将重点分析ZeroMQ的四种核心通信模式在雷达仿真场景下的适用性,设计并实现一个完整的基于ZeroMQ的通信框架,并通过实际案例验证其性能。本文旨在为雷达电子战仿真开发者提供一个实用的ZeroMQ应用指南,解决大规模分布式仿真中的通信挑战。
1. 引言
1.1 ZeroMQ在分布式仿真中的定位
ZeroMQ(Zero Message Queue)是一个轻量级、高性能的消息传递库,它提供了基于消息的异步通信机制,支持多种通信模式。在雷达电子战分布式仿真系统中,ZeroMQ因其以下特点成为理想选择:
-
高性能:ZeroMQ通过零拷贝技术和异步I/O实现了极高的消息吞吐量和低延迟
-
灵活性:支持多种通信模式(PUB/SUB、REQ/REP、PUSH/PULL等),适应不同场景
-
可扩展性:易于构建从点到点连接到复杂消息代理的各种网络拓扑
-
松耦合:通信双方无需知道对方的存在,支持动态加入和退出
-
跨平台:支持多种编程语言和操作系统,便于异构系统集成
在雷达电子战仿真中,不同的仿真实体(雷达、目标、干扰机、环境等)需要以不同的方式通信,ZeroMQ的多模式特性使其能够满足这些多样化需求。
1.2 雷达仿真通信的特殊需求
雷达电子战仿真的通信需求具有特殊性,主要表现在:
-
实时性:脉冲级数据需要在微秒级别完成传输和处理
-
高吞吐量:信号级仿真可能产生GB/s级别的数据流
-
可靠性:控制指令和状态信息必须可靠传输
-
动态性:仿真实体可能动态加入或退出仿真
-
可扩展性:需要支持从单机到大规模集群的平滑扩展
ZeroMQ通过其灵活的架构和丰富的特性,能够很好地满足这些需求。例如,PUB/SUB模式适合广播雷达脉冲数据,REQ/REP模式适合控制指令交互,PUSH/PULL模式适合数据流水线处理。
1.3 本文结构与技术亮点
本文将按照以下结构展开:
-
ZeroMQ基础与核心概念:深入理解ZeroMQ的工作原理和关键特性
-
通信模式分析与选择:分析四种核心通信模式在雷达仿真中的应用场景
-
框架设计与实现:设计并实现一个完整的基于ZeroMQ的雷达仿真通信框架
-
性能优化:探讨ZeroMQ性能调优技术和高级特性
-
实战案例:通过雷达告警接收机仿真展示ZeroMQ的实际应用
-
总结与展望:总结技术要点,展望未来发展方向
本文的技术亮点包括:
-
完整实现基于ZeroMQ的雷达仿真通信框架
-
详细分析不同通信模式的性能特征
-
提供可立即在生产环境中使用的代码示例
-
通过基准测试验证各种优化技术的效果
-
解决大规模分布式仿真中的常见问题
2. ZeroMQ基础与核心概念
2.1 ZeroMQ架构与设计哲学
ZeroMQ的设计哲学是"简单、快速、通用"。它不是一个完整的消息队列系统,而是一个消息传递库,提供了构建分布式系统的"积木"。
2.1.1 核心组件
ZeroMQ的核心组件包括:
python
# ZeroMQ核心概念示例
import zmq
import threading
import time
class ZeroMQCoreConcepts:
"""ZeroMQ核心概念演示"""
def demonstrate_context_socket(self):
"""上下文和Socket示例"""
# 1. 上下文(Context)
# 上下文是ZeroMQ的运行时环境,管理所有I/O操作
context = zmq.Context()
# 2. Socket
# Socket是ZeroMQ的通信端点,支持多种类型
socket_types = {
"PUB": zmq.PUB, # 发布
"SUB": zmq.SUB, # 订阅
"REQ": zmq.REQ, # 请求
"REP": zmq.REP, # 响应
"PUSH": zmq.PUSH, # 推送
"PULL": zmq.PULL, # 拉取
"DEALER": zmq.DEALER, # 异步请求
"ROUTER": zmq.ROUTER # 异步响应
}
return context, socket_types
def demonstrate_transport_protocols(self):
"""传输协议示例"""
protocols = {
"tcp": "tcp://127.0.0.1:5555", # TCP协议,适用于网络通信
"ipc": "ipc:///tmp/zmq_socket", # IPC协议,适用于进程间通信
"inproc": "inproc://my_socket", # 进程内协议,适用于线程间通信
"pgm": "pgm://interface;239.192.1.1:5555" # 可靠组播
}
return protocols2.1.2 ZeroMQ与传统消息队列对比
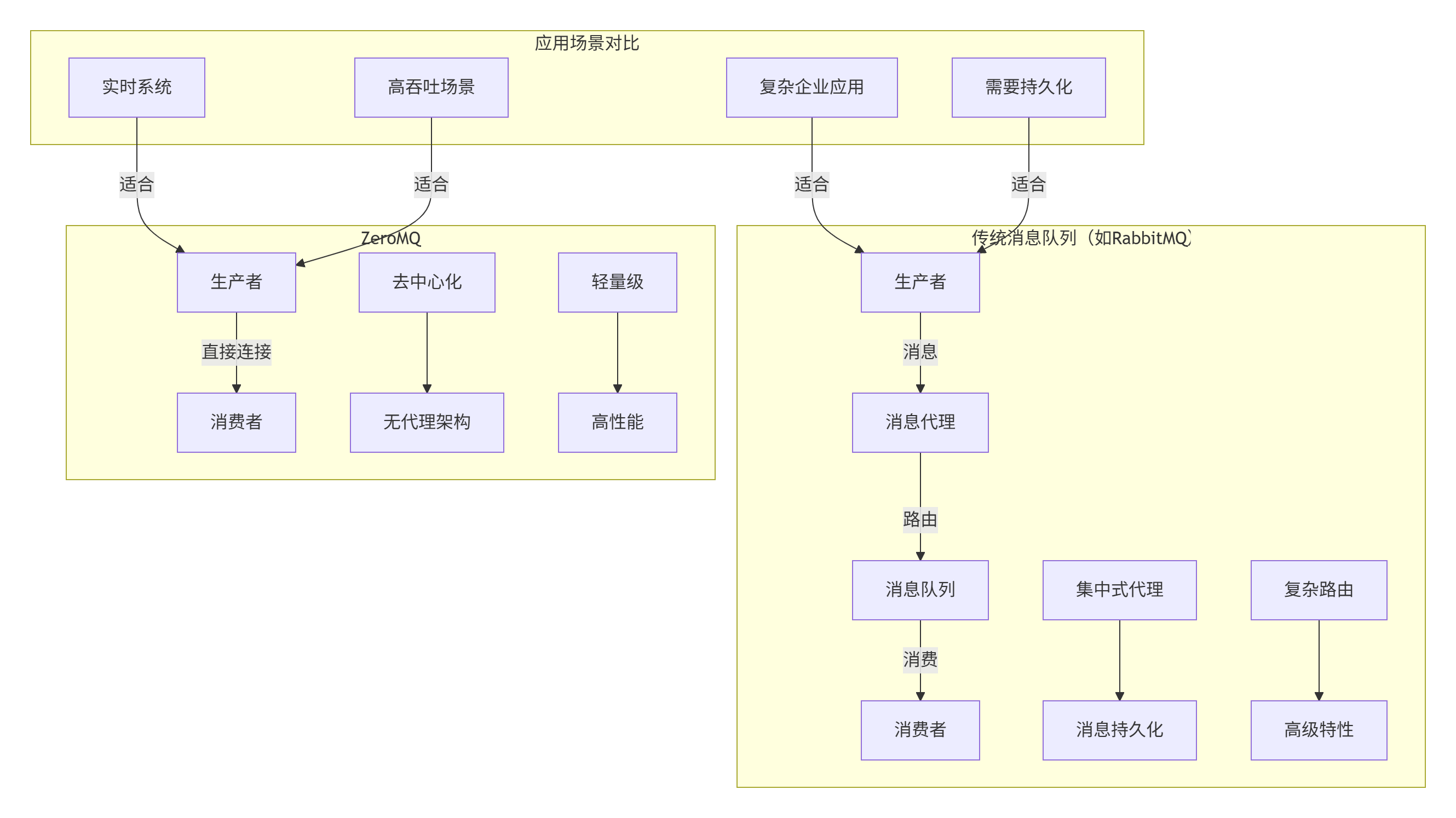
| 特性 | 传统消息队列 | ZeroMQ |
|---|---|---|
| 架构 | 代理中心化 | 对等去中心化 |
| 延迟 | 较高(毫秒级) | 极低(微秒级) |
| 吞吐量 | 中等 | 极高 |
| 可靠性 | 高(持久化) | 可配置 |
| 复杂性 | 高 | 低 |
| 适用场景 | 企业应用集成 | 实时系统、高性能计算 |
2.2 ZeroMQ通信模式详解
ZeroMQ支持多种通信模式,每种模式解决不同类型的问题。
2.2.1 请求-响应模式(REQ-REP)
请求-响应模式是最基本的同步通信模式:
python
import zmq
import time
from threading import Thread
from dataclasses import dataclass
from typing import Any, Dict
import json
@dataclass
class RadarControlCommand:
"""雷达控制命令"""
command_id: str
command_type: str # "SET_PARAM", "GET_STATUS", "START", "STOP"
parameters: Dict[str, Any]
timestamp: float
def to_json(self) -> str:
return json.dumps({
"id": self.command_id,
"type": self.command_type,
"params": self.parameters,
"timestamp": self.timestamp
})
@classmethod
def from_json(cls, json_str: str) -> 'RadarControlCommand':
data = json.loads(json_str)
return cls(
command_id=data["id"],
command_type=data["type"],
parameters=data["params"],
timestamp=data["timestamp"]
)
class RequestResponsePattern:
"""请求-响应模式实现"""
def __init__(self, context=None):
self.context = context or zmq.Context()
def start_server(self, endpoint: str = "tcp://*:5555"):
"""启动响应服务器"""
def server_thread():
socket = self.context.socket(zmq.REP)
socket.bind(endpoint)
print(f"控制服务器启动在 {endpoint}")
while True:
try:
# 接收请求
request_json = socket.recv_string()
request = RadarControlCommand.from_json(request_json)
print(f"收到命令: {request.command_type}, ID: {request.command_id}")
# 处理请求
response = self._process_command(request)
# 发送响应
socket.send_string(json.dumps(response))
except Exception as e:
error_response = {"status": "error", "message": str(e)}
socket.send_string(json.dumps(error_response))
thread = Thread(target=server_thread, daemon=True)
thread.start()
return thread
def start_client(self, endpoint: str = "tcp://localhost:5555"):
"""启动请求客户端"""
socket = self.context.socket(zmq.REQ)
socket.connect(endpoint)
return socket
def send_command(self, socket, command: RadarControlCommand, timeout: float = 5.0) -> Dict:
"""发送控制命令"""
# 设置超时
socket.setsockopt(zmq.RCVTIMEO, int(timeout * 1000))
try:
# 发送请求
socket.send_string(command.to_json())
# 接收响应
response_json = socket.recv_string()
return json.loads(response_json)
except zmq.Again:
return {"status": "timeout", "message": f"命令 {command.command_id} 超时"}
except Exception as e:
return {"status": "error", "message": str(e)}
def _process_command(self, command: RadarControlCommand) -> Dict:
"""处理控制命令"""
if command.command_type == "SET_PARAM":
return self._handle_set_param(command)
elif command.command_type == "GET_STATUS":
return self._handle_get_status(command)
elif command.command_type == "START":
return self._handle_start(command)
elif command.command_type == "STOP":
return self._handle_stop(command)
else:
return {"status": "error", "message": f"未知命令类型: {command.command_type}"}
def _handle_set_param(self, command: RadarControlCommand) -> Dict:
"""处理参数设置命令"""
# 模拟参数设置
params = command.parameters
print(f"设置参数: {params}")
return {
"status": "success",
"command_id": command.command_id,
"result": {"applied_params": params}
}
def _handle_get_status(self, command: RadarControlCommand) -> Dict:
"""处理状态查询命令"""
# 模拟状态查询
status = {
"operational": True,
"frequency": 3000.0,
"power": 100.0,
"temperature": 45.5,
"uptime": 3600
}
return {
"status": "success",
"command_id": command.command_id,
"result": status
}
def _handle_start(self, command: RadarControlCommand) -> Dict:
"""处理启动命令"""
print("雷达启动")
return {
"status": "success",
"command_id": command.command_id,
"result": {"state": "running"}
}
def _handle_stop(self, command: RadarControlCommand) -> Dict:
"""处理停止命令"""
print("雷达停止")
return {
"status": "success",
"command_id": command.command_id,
"result": {"state": "stopped"}
}
# 使用示例
def demo_request_response():
"""请求-响应模式演示"""
pattern = RequestResponsePattern()
# 启动服务器
server_thread = pattern.start_server()
# 给服务器启动时间
time.sleep(0.5)
# 创建客户端
client_socket = pattern.start_client()
# 发送各种命令
commands = [
RadarControlCommand("cmd1", "GET_STATUS", {}, time.time()),
RadarControlCommand("cmd2", "SET_PARAM", {"frequency": 3500.0}, time.time()),
RadarControlCommand("cmd3", "START", {}, time.time()),
RadarControlCommand("cmd4", "STOP", {}, time.time())
]
for cmd in commands:
response = pattern.send_command(client_socket, cmd)
print(f"命令 {cmd.command_id} 响应: {response}")
time.sleep(0.1)
# 清理
client_socket.close()
server_thread.join(timeout=1)2.2.2 发布-订阅模式(PUB-SUB)
发布-订阅模式是雷达仿真中最常用的模式,适合广播雷达脉冲数据:
python
import zmq
import time
import json
import random
from threading import Thread
from dataclasses import dataclass, asdict
from typing import List, Dict, Any
import uuid
from datetime import datetime
@dataclass
class RadarPulse:
"""雷达脉冲数据"""
pulse_id: str
emitter_id: str
timestamp: float
frequency: float # MHz
power: float # dBm
pulse_width: float # μs
pulse_interval: float # μs
azimuth: float # 度
elevation: float # 度
modulation: str # 调制类型
def to_dict(self) -> Dict[str, Any]:
return asdict(self)
@classmethod
def random_pulse(cls, emitter_id: str = "radar_001") -> 'RadarPulse':
"""生成随机雷达脉冲"""
return cls(
pulse_id=str(uuid.uuid4()),
emitter_id=emitter_id,
timestamp=time.time(),
frequency=random.uniform(1000, 10000), # 1-10 GHz
power=random.uniform(80, 120), # 80-120 dBm
pulse_width=random.uniform(1, 100), # 1-100 μs
pulse_interval=random.uniform(100, 1000), # 100-1000 μs
azimuth=random.uniform(0, 360), # 0-360度
elevation=random.uniform(-10, 90), # -10到90度
modulation=random.choice(["CW", "LFM", "PHASE_CODED"])
)
class PublishSubscribePattern:
"""发布-订阅模式实现"""
def __init__(self, context=None):
self.context = context or zmq.Context()
self.publishers = {}
self.subscribers = {}
def create_publisher(self, endpoint: str = "tcp://*:5556", topic: str = "radar.pulses"):
"""创建发布者"""
socket = self.context.socket(zmq.PUB)
# 设置发送高水位标记
socket.setsockopt(zmq.SNDHWM, 1000)
# 启用TCP保活
socket.setsockopt(zmq.TCP_KEEPALIVE, 1)
socket.setsockopt(zmq.TCP_KEEPALIVE_IDLE, 300)
socket.setsockopt(zmq.TCP_KEEPALIVE_INTVL, 10)
socket.bind(endpoint)
publisher_id = f"pub_{len(self.publishers)}"
self.publishers[publisher_id] = {
"socket": socket,
"endpoint": endpoint,
"topic": topic
}
# 等待连接建立
time.sleep(0.1)
return publisher_id, socket
def create_subscriber(self, endpoint: str = "tcp://localhost:5556",
topics: List[str] = ["radar.pulses"]):
"""创建订阅者"""
socket = self.context.socket(zmq.SUB)
# 设置接收高水位标记
socket.setsockopt(zmq.RCVHWM, 1000)
# 设置接收缓冲区
socket.setsockopt(zmq.RCVBUF, 1024 * 1024) # 1MB
socket.connect(endpoint)
# 订阅主题
for topic in topics:
socket.setsockopt_string(zmq.SUBSCRIBE, topic)
subscriber_id = f"sub_{len(self.subscribers)}"
self.subscribers[subscriber_id] = {
"socket": socket,
"endpoint": endpoint,
"topics": topics
}
return subscriber_id, socket
def publish_pulse(self, socket, topic: str, pulse: RadarPulse):
"""发布雷达脉冲"""
message = {
"topic": topic,
"data": pulse.to_dict(),
"timestamp": time.time()
}
# 发送消息:主题 + 分隔符 + 数据
socket.send_string(f"{topic} {json.dumps(message)}")
def receive_pulse(self, socket, timeout: float = 1.0):
"""接收雷达脉冲"""
socket.setsockopt(zmq.RCVTIMEO, int(timeout * 1000))
try:
message = socket.recv_string()
# 解析消息
if " " in message:
topic, data_str = message.split(" ", 1)
data = json.loads(data_str)
return topic, data
else:
return None, None
except zmq.Again:
return None, None
except Exception as e:
print(f"接收消息错误: {e}")
return None, None
def start_pulse_generator(self, publisher_id: str,
pulse_rate: float = 1000.0, # 脉冲/秒
duration: float = 10.0): # 运行时间
"""启动脉冲生成器"""
def generator():
publisher = self.publishers[publisher_id]
socket = publisher["socket"]
topic = publisher["topic"]
end_time = time.time() + duration
interval = 1.0 / pulse_rate
print(f"开始生成脉冲,速率: {pulse_rate} Hz, 持续时间: {duration}s")
count = 0
while time.time() < end_time:
pulse = RadarPulse.random_pulse()
self.publish_pulse(socket, topic, pulse)
count += 1
# 控制发送速率
time.sleep(interval)
print(f"脉冲生成完成,共生成 {count} 个脉冲")
thread = Thread(target=generator, daemon=True)
thread.start()
return thread
def start_pulse_processor(self, subscriber_id: str,
callback=None,
stats_interval: float = 5.0):
"""启动脉冲处理器"""
def processor():
subscriber = self.subscribers[subscriber_id]
socket = subscriber["socket"]
stats = {
"start_time": time.time(),
"pulse_count": 0,
"last_report": time.time()
}
print(f"开始处理脉冲,订阅主题: {subscriber['topics']}")
while True:
topic, data = self.receive_pulse(socket, timeout=0.1)
if data:
stats["pulse_count"] += 1
# 调用回调函数
if callback:
callback(topic, data)
# 定期报告统计
current_time = time.time()
if current_time - stats["last_report"] >= stats_interval:
elapsed = current_time - stats["start_time"]
rate = stats["pulse_count"] / elapsed if elapsed > 0 else 0
print(f"处理统计: {stats['pulse_count']} 脉冲, "
f"速率: {rate:.1f} Hz")
stats["last_report"] = current_time
thread = Thread(target=processor, daemon=True)
thread.start()
return thread
# 使用示例
def demo_publish_subscribe():
"""发布-订阅模式演示"""
pattern = PublishSubscribePattern()
# 创建发布者
pub_id, pub_socket = pattern.create_publisher()
# 创建多个订阅者
sub1_id, sub1_socket = pattern.create_subscriber(topics=["radar.pulses"])
sub2_id, sub2_socket = pattern.create_subscriber(topics=["radar.pulses"])
# 定义处理回调
def process_pulse(topic, data):
pulse_data = data.get("data", {})
# 这里可以添加实际的处理逻辑
pass
# 启动处理器
processor1 = pattern.start_pulse_processor(sub1_id, process_pulse)
processor2 = pattern.start_pulse_processor(sub2_id, process_pulse)
# 启动脉冲生成器
generator = pattern.start_pulse_generator(pub_id, pulse_rate=100, duration=5)
# 等待运行
time.sleep(6)
print("演示完成")
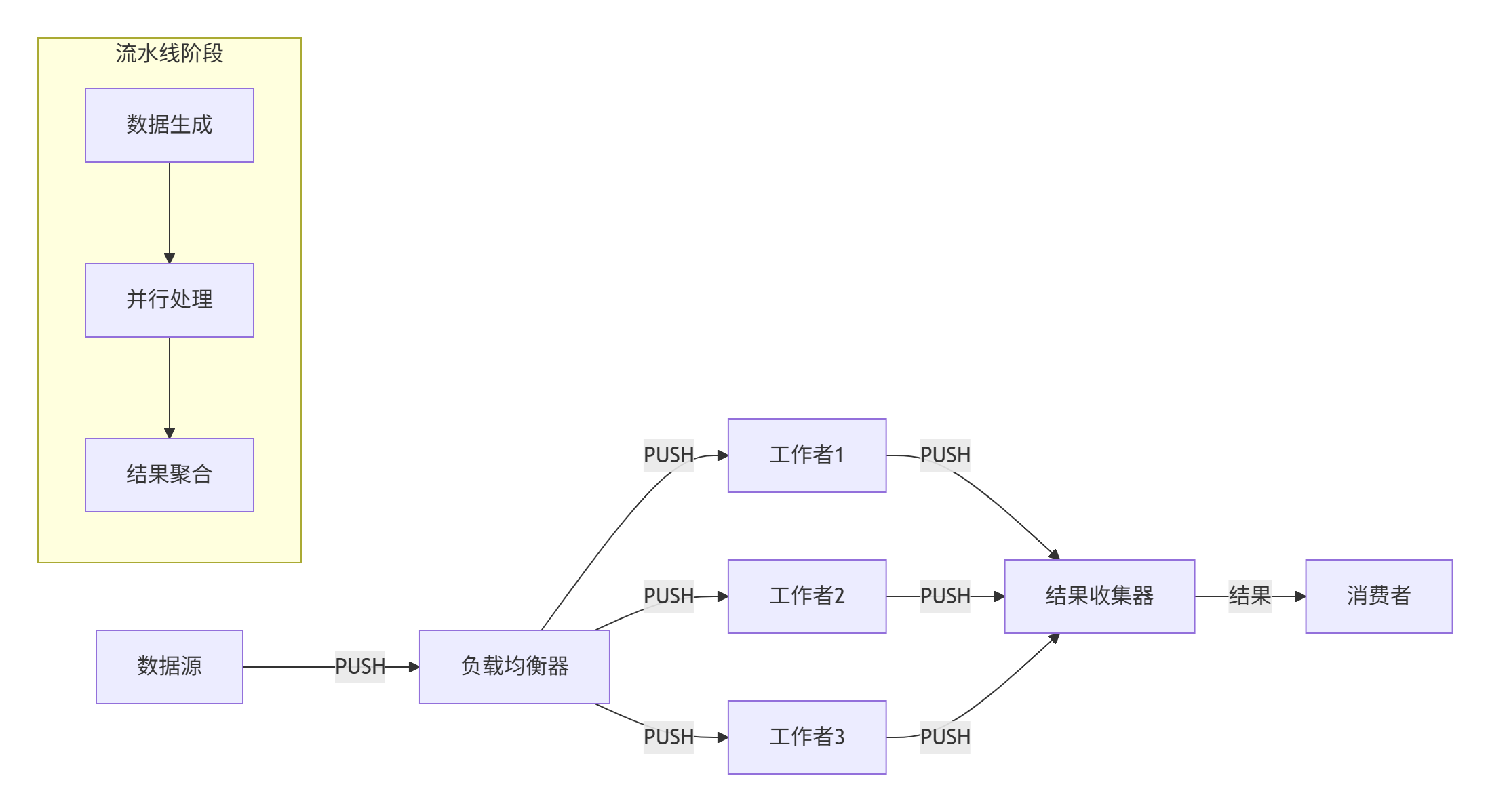
return pattern2.2.3 推送-拉取模式(PUSH-PULL)
推送-拉取模式适用于构建数据处理流水线:
python
import zmq
import time
import json
from threading import Thread
from typing import List, Dict, Any
import numpy as np
from concurrent.futures import ThreadPoolExecutor
class PushPullPattern:
"""推送-拉取模式实现"""
def __init__(self, context=None):
self.context = context or zmq.Context()
def create_ventilator(self, endpoints: List[str]):
"""创建数据分发器(通风机)"""
socket = self.context.socket(zmq.PUSH)
# 绑定到所有端点
for endpoint in endpoints:
socket.bind(endpoint)
return socket
def create_worker(self, pull_endpoint: str, push_endpoint: str):
"""创建工作节点"""
pull_socket = self.context.socket(zmq.PULL)
pull_socket.connect(pull_endpoint)
push_socket = self.context.socket(zmq.PUSH)
push_socket.connect(push_endpoint)
return pull_socket, push_socket
def create_sink(self, endpoint: str):
"""创建结果收集器(接收器)"""
socket = self.context.socket(zmq.PULL)
socket.bind(endpoint)
return socket
def process_signal_data(self, data: Dict[str, Any]) -> Dict[str, Any]:
"""处理信号数据(模拟)"""
# 模拟信号处理:FFT和特征提取
signal = np.array(data.get("signal", []))
if len(signal) > 0:
# 计算FFT
spectrum = np.fft.fft(signal)
magnitude = np.abs(spectrum)
# 提取特征
features = {
"mean_frequency": np.mean(magnitude),
"max_frequency": np.max(magnitude),
"bandwidth": np.std(magnitude),
"peak_count": len(np.where(magnitude > np.mean(magnitude) * 2)[0])
}
return {
"original_data": data,
"spectrum": magnitude.tolist()[:10], # 只返回前10个点
"features": features,
"processing_time": time.time()
}
return {"error": "Empty signal"}
def start_ventilator(self, socket, data_stream, worker_count: int):
"""启动数据分发器"""
def ventilator():
# 发送启动信号
for _ in range(worker_count):
socket.send_json({"type": "START"})
# 发送数据
for data in data_stream:
socket.send_json(data)
# 发送结束信号
for _ in range(worker_count):
socket.send_json({"type": "END"})
thread = Thread(target=ventilator, daemon=True)
thread.start()
return thread
def start_worker(self, pull_socket, push_socket, worker_id: str):
"""启动工作节点"""
def worker():
print(f"工作者 {worker_id} 启动")
while True:
try:
# 接收数据
data = pull_socket.recv_json()
if data.get("type") == "END":
print(f"工作者 {worker_id} 收到结束信号")
break
elif data.get("type") == "START":
continue
# 处理数据
result = self.process_signal_data(data)
result["worker_id"] = worker_id
result["received_time"] = time.time()
# 发送结果
push_socket.send_json(result)
except Exception as e:
print(f"工作者 {worker_id} 错误: {e}")
error_result = {
"error": str(e),
"worker_id": worker_id,
"timestamp": time.time()
}
push_socket.send_json(error_result)
print(f"工作者 {worker_id} 停止")
thread = Thread(target=worker, daemon=True)
thread.start()
return thread
def start_sink(self, socket, result_callback=None):
"""启动结果收集器"""
def sink():
print("结果收集器启动")
results = []
start_time = time.time()
while True:
try:
result = socket.recv_json()
if result.get("type") == "END":
break
results.append(result)
# 调用回调
if result_callback:
result_callback(result)
except Exception as e:
print(f"结果收集错误: {e}")
end_time = time.time()
elapsed = end_time - start_time
print(f"结果收集完成")
print(f" 总处理时间: {elapsed:.3f}s")
print(f" 处理结果数: {len(results)}")
print(f" 处理速率: {len(results)/elapsed:.1f} 结果/秒")
return results
thread = Thread(target=sink, daemon=True)
thread.start()
return thread
# 使用示例
def demo_push_pull():
"""推送-拉取模式演示"""
pattern = PushPullPattern()
# 定义端点
ventilator_endpoint = "tcp://*:5557"
sink_endpoint = "tcp://*:5558"
# 创建组件
ventilator_socket = pattern.create_ventilator([ventilator_endpoint])
sink_socket = pattern.create_sink(sink_endpoint)
# 创建工作节点
workers = []
worker_count = 3
for i in range(worker_count):
pull_endpoint = ventilator_endpoint.replace("*", "localhost")
push_endpoint = sink_endpoint.replace("*", "localhost")
pull_socket, push_socket = pattern.create_worker(pull_endpoint, push_endpoint)
worker = pattern.start_worker(pull_socket, push_socket, f"worker_{i}")
workers.append(worker)
# 生成测试数据
def generate_signal_data(count: int = 100):
for i in range(count):
signal = np.random.randn(1024).tolist() # 1024个随机点
yield {
"data_id": i,
"signal": signal,
"timestamp": time.time()
}
# 启动结果收集器
def result_callback(result):
# 这里可以添加结果处理逻辑
pass
sink_thread = pattern.start_sink(sink_socket, result_callback)
# 启动数据分发
data_stream = generate_signal_data(50)
ventilator_thread = pattern.start_ventilator(ventilator_socket, data_stream, worker_count)
# 等待处理完成
time.sleep(3)
# 清理
ventilator_socket.close()
sink_socket.close()
print("推送-拉取演示完成")2.3 ZeroMQ高级特性
ZeroMQ提供了许多高级特性,可以优化性能和可靠性。
2.3.1 消息信封和多部分消息
ZeroMQ支持多部分消息,这对于发送复杂数据结构非常有用:
python
import zmq
import pickle
import numpy as np
from typing import List, Any
class ZeroMQAdvancedFeatures:
"""ZeroMQ高级特性"""
def __init__(self, context=None):
self.context = context or zmq.Context()
def demo_multipart_messages(self):
"""多部分消息演示"""
# 创建socket
sender = self.context.socket(zmq.PUSH)
receiver = self.context.socket(zmq.PULL)
sender.bind("tcp://*:5559")
receiver.connect("tcp://localhost:5559")
# 准备复杂数据
metadata = {
"emitter_id": "radar_001",
"timestamp": time.time(),
"data_type": "complex_signal"
}
signal_data = np.random.randn(1000) + 1j * np.random.randn(1000)
parameters = {"frequency": 3000.0, "bandwidth": 100.0}
# 发送多部分消息
sender.send_multipart([
pickle.dumps(metadata), # 第1部分:元数据
pickle.dumps(signal_data), # 第2部分:信号数据
pickle.dumps(parameters) # 第3部分:参数
])
# 接收多部分消息
parts = receiver.recv_multipart()
received_metadata = pickle.loads(parts[0])
received_signal = pickle.loads(parts[1])
received_params = pickle.loads(parts[2])
print(f"接收到 {len(parts)} 部分消息")
print(f"元数据: {received_metadata}")
print(f"信号形状: {received_signal.shape}")
print(f"参数: {received_params}")
sender.close()
receiver.close()
def demo_message_envelopes(self):
"""消息信封演示"""
dealer = self.context.socket(zmq.DEALER)
router = self.context.socket(zmq.ROUTER)
dealer.identity = b"client_001"
router.bind("tcp://*:5560")
dealer.connect("tcp://localhost:5560")
# 发送带信封的消息
dealer.send_multipart([
b"", # 空帧:信封分隔符
b"Hello", # 消息体
b"World" # 第二部分
])
# 接收带信封的消息
frames = router.recv_multipart()
print(f"收到 {len(frames)} 帧:")
for i, frame in enumerate(frames):
print(f" 帧{i}: {frame}")
# 响应(保持信封)
router.send_multipart([
frames[0], # 路由标识
b"", # 空帧
b"Response" # 响应体
])
response = dealer.recv_multipart()
print(f"响应: {response}")
dealer.close()
router.close()2.3.2 监控与诊断
ZeroMQ提供了内置的监控功能:
python
class ZeroMQMonitor:
"""ZeroMQ监控器"""
def __init__(self, context=None):
self.context = context or zmq.Context()
self.monitor_sockets = {}
def enable_monitoring(self, socket, endpoint: str, events: int = zmq.EVENT_ALL):
"""启用socket监控"""
monitor_endpoint = f"inproc://monitor-{hash(endpoint)}"
# 启用监控
socket.monitor(monitor_endpoint, events)
# 创建监控socket
monitor = self.context.socket(zmq.PAIR)
monitor.connect(monitor_endpoint)
self.monitor_sockets[endpoint] = monitor
return monitor
def start_monitoring(self, callback=None):
"""启动监控线程"""
def monitor_loop():
poller = zmq.Poller()
for endpoint, monitor in self.monitor_sockets.items():
poller.register(monitor, zmq.POLLIN)
while True:
try:
socks = dict(poller.poll(timeout=1000)) # 1秒超时
for monitor, _ in socks.items():
# 获取监控事件
event_data = monitor.recv_multipart()
event_id = int.from_bytes(event_data[0][:2], 'little')
event_value = int.from_bytes(event_data[0][2:], 'little')
event_endpoint = event_data[1].decode('utf-8')
event_name = self._get_event_name(event_id)
event_info = {
"id": event_id,
"name": event_name,
"value": event_value,
"endpoint": event_endpoint,
"timestamp": time.time()
}
print(f"ZeroMQ事件: {event_name} on {event_endpoint}")
if callback:
callback(event_info)
except KeyboardInterrupt:
break
except Exception as e:
print(f"监控错误: {e}")
thread = Thread(target=monitor_loop, daemon=True)
thread.start()
return thread
def _get_event_name(self, event_id: int) -> str:
"""获取事件名称"""
events = {
zmq.EVENT_CONNECTED: "CONNECTED",
zmq.EVENT_CONNECT_DELAYED: "CONNECT_DELAYED",
zmq.EVENT_CONNECT_RETRIED: "CONNECT_RETRIED",
zmq.EVENT_LISTENING: "LISTENING",
zmq.EVENT_BIND_FAILED: "BIND_FAILED",
zmq.EVENT_ACCEPTED: "ACCEPTED",
zmPTED_FAILED: "ACCEPT_FAILED",
zmq.EVENT_CLOSED: "CLOSED",
zmq.EVENT_CLOSE_FAILED: "CLOSE_FAILED",
zmq.EVENT_DISCONNECTED: "DISCONNECTED",
zmq.EVENT_MONITOR_STOPPED: "MONITOR_STOPPED",
zmq.EVENT_HANDSHAKE_FAILED_NO_DETAIL: "HANDSHAKE_FAILED_NO_DETAIL",
zmq.EVENT_HANDSHAKE_SUCCEEDED: "HANDSHAKE_SUCCEEDED",
zmq.EVENT_HANDSHAKE_FAILED_PROTOCOL: "HANDSHAKE_FAILED_PROTOCOL",
zmq.EVENT_HANDSHAKE_FAILED_AUTH: "HANDSHAKE_FAILED_AUTH"
}
return events.get(event_id, f"UNKNOWN({event_id})")
# 使用示例
def demo_monitoring():
"""监控演示"""
context = zmq.Context()
monitor = ZeroMQMonitor(context)
# 创建socket并启用监控
socket = context.socket(zmq.REP)
endpoint = "tcp://*:5561"
monitor_socket = monitor.enable_monitoring(socket, endpoint)
# 定义事件回调
def event_callback(event):
print(f"事件回调: {event}")
# 启动监控
monitor_thread = monitor.start_monitoring(event_callback)
# 绑定socket
socket.bind(endpoint)
# 运行一段时间
time.sleep(2)
# 清理
socket.close()
monitor_thread.join(timeout=1)
print("监控演示完成")3. ZeroMQ在雷达仿真中的通信模式选择
3.1 通信模式对比分析
在雷达电子战仿真中,选择合适的通信模式对系统性能有决定性影响。
3.1.1 模式适用性分析
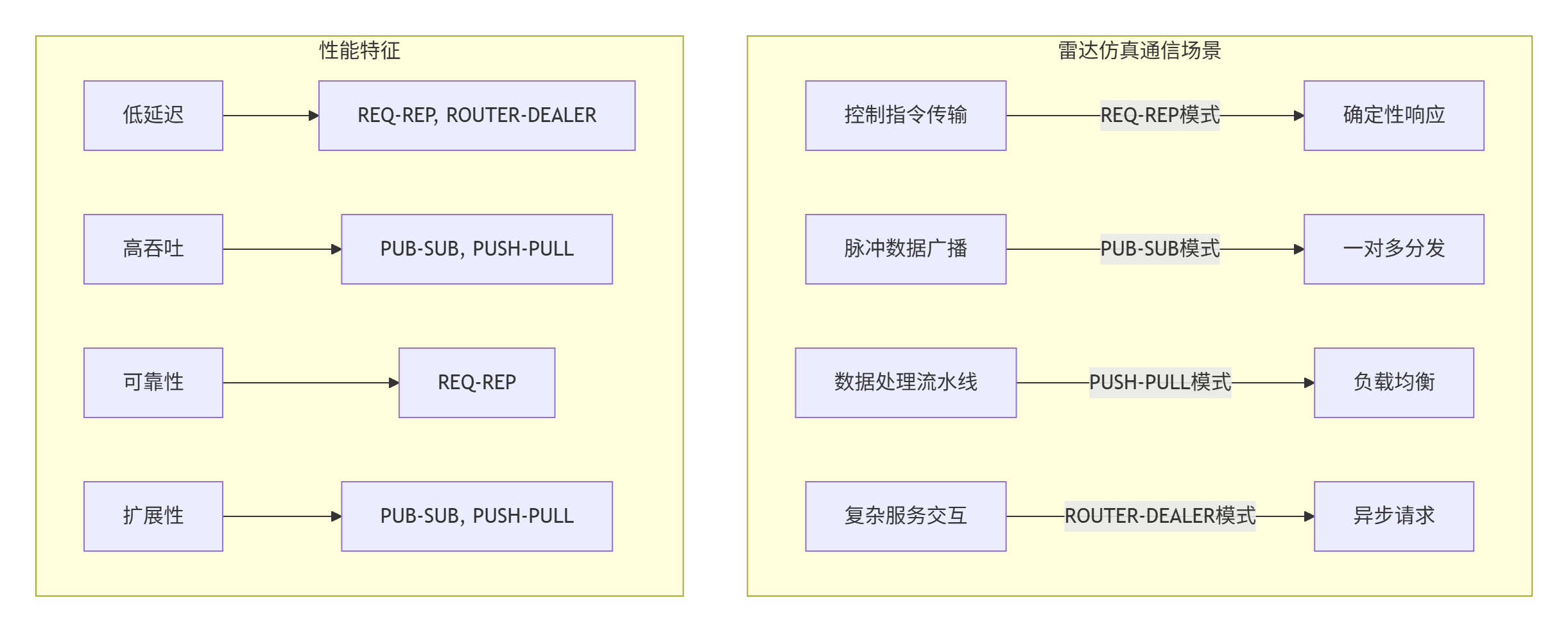
3.1.2 详细对比表
| 通信模式 | 典型延迟 | 最大吞吐量 | 可靠性 | 适用雷达仿真场景 |
|---|---|---|---|---|
| REQ-REP | 0.1-1ms | 1-10K msg/s | 高 | 控制指令、状态查询 |
| PUB-SUB | 0.05-0.5ms | 100K-1M msg/s | 中 | 脉冲广播、态势发布 |
| PUSH-PULL | 0.1-0.5ms | 10K-100K msg/s | 中 | 数据处理流水线 |
| ROUTER-DEALER | 0.2-2ms | 5K-50K msg/s | 高 | 服务发现、负载均衡 |
3.2 混合模式架构设计
在实际雷达仿真系统中,通常需要混合使用多种通信模式:
python
from typing import Dict, List, Any, Optional
import asyncio
import zmq.asyncio
from enum import Enum
import json
import uuid
class CommunicationMode(Enum):
"""通信模式枚举"""
REQ_REP = "request_reply"
PUB_SUB = "publish_subscribe"
PUSH_PULL = "push_pull"
ROUTER_DEALER = "router_dealer"
class HybridCommunicationArchitecture:
"""混合通信架构"""
def __init__(self, config: Dict[str, Any]):
self.config = config
self.context = zmq.asyncio.Context()
# 存储所有socket
self.sockets = {
"control": None, # 控制通道
"data": None, # 数据通道
"status": None, # 状态通道
"event": None # 事件通道
}
# 主题管理
self.topics = {
"radar_pulses": "radar.pulses",
"target_tracks": "target.tracks",
"system_events": "system.events",
"control_commands": "control.commands"
}
# 序列化器
self.serializer = MsgPackSerializer()
async def initialize(self, node_type: str, node_id: str):
"""初始化通信架构"""
self.node_type = node_type
self.node_id = node_id
# 根据节点类型配置不同的socket
if node_type == "radar_emitter":
await self._initialize_radar_emitter()
elif node_type == "radar_receiver":
await self._initialize_radar_receiver()
elif node_type == "target":
await self._initialize_target()
elif node_type == "jammer":
await self._initialize_jammer()
elif node_type == "controller":
await self._initialize_controller()
print(f"节点 {node_type}.{node_id} 通信架构初始化完成")
async def _initialize_radar_emitter(self):
"""初始化雷达发射机节点"""
# 控制通道:REP socket用于接收控制指令
self.sockets["control"] = self.context.socket(zmq.REP)
control_port = self.config.get("control_port", 6000)
self.sockets["control"].bind(f"tcp://*:{control_port}")
# 数据通道:PUB socket用于广播脉冲数据
self.sockets["data"] = self.context.socket(zmq.PUB)
data_port = self.config.get("data_port", 6001)
self.sockets["data"].bind(f"tcp://*:{data_port}")
# 状态通道:PUSH socket用于推送状态更新
self.sockets["status"] = self.context.socket(zmq.PUSH)
status_endpoint = self.config.get("status_endpoint", "tcp://localhost:6002")
self.sockets["status"].connect(status_endpoint)
# 启动处理任务
asyncio.create_task(self._handle_control_messages())
asyncio.create_task(self._publish_status_updates())
async def _initialize_radar_receiver(self):
"""初始化雷达接收机节点"""
# 控制通道:REQ socket用于发送控制指令
self.sockets["control"] = self.context.socket(zmq.REQ)
control_endpoint = self.config.get("control_endpoint", "tcp://localhost:6000")
self.sockets["control"].connect(control_endpoint)
# 数据通道:SUB socket用于接收脉冲数据
self.sockets["data"] = self.context.socket(zmq.SUB)
data_endpoint = self.config.get("data_endpoint", "tcp://localhost:6001")
self.sockets["data"].connect(data_endpoint)
self.sockets["data"].setsockopt_string(zmq.SUBSCRIBE, self.topics["radar_pulses"])
# 处理通道:PUSH socket用于推送处理结果
self.sockets["event"] = self.context.socket(zmq.PUSH)
event_endpoint = self.config.get("event_endpoint", "tcp://localhost:6003")
self.sockets["event"].connect(event_endpoint)
# 启动处理任务
asyncio.create_task(self._process_radar_pulses())
async def _initialize_controller(self):
"""初始化控制器节点"""
# 控制通道:DEALER socket用于异步控制
self.sockets["control"] = self.context.socket(zmq.DEALER)
self.sockets["control"].identity = f"controller_{self.node_id}".encode()
control_port = self.config.get("control_port", 6004)
self.sockets["control"].bind(f"tcp://*:{control_port}")
# 状态通道:PULL socket用于收集状态
self.sockets["status"] = self.context.socket(zmq.PULL)
status_port = self.config.get("status_port", 6002)
self.sockets["status"].bind(f"tcp://*:{status_port}")
# 事件通道:PULL socket用于收集事件
self.sockets["event"] = self.context.socket(zmq.PULL)
event_port = self.config.get("event_port", 6003)
self.sockets["event"].bind(f"tcp://*:{event_port}")
# 启动处理任务
asyncio.create_task(self._monitor_system_status())
asyncio.create_task(self._process_system_events())
async def send_control_command(self, target: str, command: Dict[str, Any]) -> Dict[str, Any]:
"""发送控制命令"""
if self.sockets["control"] is None:
raise ValueError("控制socket未初始化")
# 添加元数据
full_command = {
"command_id": str(uuid.uuid4()),
"sender": self.node_id,
"target": target,
"timestamp": time.time(),
"data": command
}
# 序列化
command_data = self.serializer.serialize(full_command)
# 发送命令
await self.sockets["control"].send(command_data)
# 如果是REQ socket,等待响应
if self.sockets["control"].type == zmq.REQ:
response_data = await self.sockets["control"].recv()
response = self.serializer.deserialize(response_data)
return response
return {"status": "sent"}
async def publish_data(self, topic: str, data: Dict[str, Any]):
"""发布数据"""
if self.sockets["data"] is None:
raise ValueError("数据socket未初始化")
message = {
"topic": topic,
"sender": self.node_id,
"timestamp": time.time(),
"data": data
}
message_data = self.serializer.serialize(message)
await self.sockets["data"].send_multipart([topic.encode(), message_data])
async def _handle_control_messages(self):
"""处理控制消息"""
while True:
try:
# 接收控制消息
command_data = await self.sockets["control"].recv()
command = self.serializer.deserialize(command_data)
print(f"收到控制命令: {command.get('command_id')}")
# 处理命令
response = await self._process_control_command(command)
# 发送响应
response_data = self.serializer.serialize(response)
await self.sockets["control"].send(response_data)
except Exception as e:
print(f"处理控制消息错误: {e}")
error_response = {"status": "error", "message": str(e)}
error_data = self.serializer.serialize(error_response)
await self.sockets["control"].send(error_data)
async def _process_control_command(self, command: Dict[str, Any]) -> Dict[str, Any]:
"""处理控制命令"""
command_data = command.get("data", {})
command_type = command_data.get("type")
if command_type == "set_parameter":
return await self._handle_set_parameter(command_data)
elif command_type == "get_status":
return await self._handle_get_status(command_data)
elif command_type == "start_emission":
return await self._handle_start_emission(command_data)
elif command_type == "stop_emission":
return await self._handle_stop_emission(command_data)
else:
return {"status": "error", "message": f"未知命令类型: {command_type}"}
async def _publish_status_updates(self):
"""发布状态更新"""
while True:
try:
# 收集状态信息
status = {
"node_id": self.node_id,
"node_type": self.node_type,
"timestamp": time.time(),
"cpu_usage": 0.1, # 模拟
"memory_usage": 0.2, # 模拟
"message_count": 0 # 模拟
}
# 发布状态
status_data = self.serializer.serialize(status)
await self.sockets["status"].send(status_data)
# 每5秒更新一次
await asyncio.sleep(5)
except Exception as e:
print(f"发布状态更新错误: {e}")
await asyncio.sleep(1)
async def _process_radar_pulses(self):
"""处理雷达脉冲"""
while True:
try:
# 接收脉冲数据
topic, data = await self.sockets["data"].recv_multipart()
message = self.serializer.deserialize(data)
# 处理脉冲
processed_data = await self._process_pulse_data(message)
# 发布处理结果
if processed_data:
event_data = self.serializer.serialize(processed_data)
await self.sockets["event"].send(event_data)
except Exception as e:
print(f"处理雷达脉冲错误: {e}")
await asyncio.sleep(0.1)
async def _monitor_system_status(self):
"""监控系统状态"""
while True:
try:
# 接收状态更新
status_data = await self.sockets["status"].recv()
status = self.serializer.deserialize(status_data)
# 处理状态信息
print(f"状态更新: {status.get('node_id')} - CPU: {status.get('cpu_usage'):.1%}")
except Exception as e:
print(f"监控系统状态错误: {e}")
await asyncio.sleep(1)
async def close(self):
"""关闭所有连接"""
for name, socket in self.sockets.items():
if socket:
socket.close()
self.context.term()
print("通信架构已关闭")
# 使用示例
async def demo_hybrid_architecture():
"""混合架构演示"""
# 创建配置
config = {
"control_port": 7000,
"data_port": 7001,
"status_port": 7002,
"event_port": 7003
}
# 创建控制器
controller = HybridCommunicationArchitecture(config)
await controller.initialize("controller", "ctrl_001")
# 创建雷达发射机
emitter_config = {
"control_port": 7010,
"data_port": 7011,
"status_endpoint": "tcp://localhost:7002"
}
emitter = HybridCommunicationArchitecture(emitter_config)
await emitter.initialize("radar_emitter", "radar_001")
# 创建雷达接收机
receiver_config = {
"control_endpoint": "tcp://localhost:7010",
"data_endpoint": "tcp://localhost:7011",
"event_endpoint": "tcp://localhost:7003"
}
receiver = HybridCommunicationArchitecture(receiver_config)
await receiver.initialize("radar_receiver", "receiver_001")
# 发送控制命令
command = {
"type": "get_status",
"parameters": {}
}
response = await receiver.send_control_command("radar_001", command)
print(f"控制命令响应: {response}")
# 发布数据
pulse_data = {
"frequency": 3000.0,
"power": 100.0,
"pulse_width": 10.0
}
await emitter.publish_data("radar.pulses", pulse_data)
# 运行一段时间
await asyncio.sleep(2)
# 清理
await controller.close()
await emitter.close()
await receiver.close()
print("混合架构演示完成")4. 基于ZeroMQ的雷达仿真通信框架设计
4.1 框架架构设计
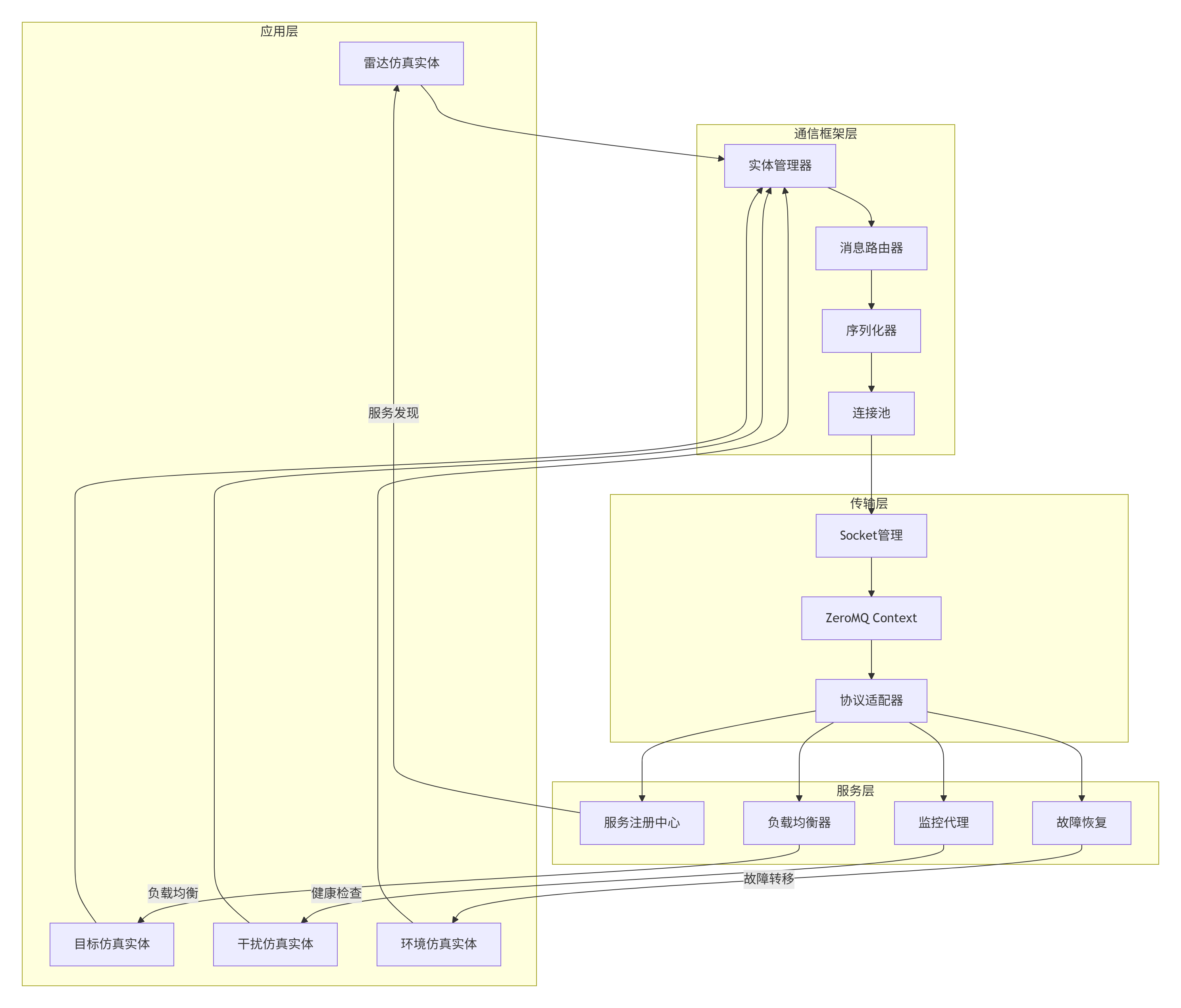
4.2 核心组件实现
4.2.1 实体管理器
实体管理器负责管理所有仿真实体的生命周期和通信:
python
import asyncio
import zmq.asyncio
from typing import Dict, List, Any, Optional, Set, Callable
from dataclasses import dataclass, field
from enum import Enum
import uuid
import time
from collections import defaultdict
import pickle
class EntityType(Enum):
"""实体类型枚举"""
RADAR_EMITTER = "radar_emitter"
RADAR_RECEIVER = "radar_receiver"
TARGET = "target"
JAMMER = "jammer"
ENVIRONMENT = "environment"
CONTROLLER = "controller"
class EntityStatus(Enum):
"""实体状态枚举"""
INITIALIZING = "initializing"
READY = "ready"
RUNNING = "running"
PAUSED = "paused"
STOPPED = "stopped"
ERROR = "error"
@dataclass
class EntityInfo:
"""实体信息"""
entity_id: str
entity_type: EntityType
status: EntityStatus
endpoint: str
capabilities: List[str] = field(default_factory=list)
metadata: Dict[str, Any] = field(default_factory=dict)
last_heartbeat: float = field(default_factory=time.time)
created_at: float = field(default_factory=time.time)
class EntityManager:
"""实体管理器"""
def __init__(self, context=None):
self.context = context or zmq.asyncio.Context()
# 实体注册表
self.entities: Dict[str, EntityInfo] = {}
# 主题订阅关系
self.topic_subscriptions: Dict[str, Set[str]] = defaultdict(set)
# 实体类型索引
self.type_index: Dict[EntityType, Set[str]] = defaultdict(set)
# 心跳检测
self.heartbeat_interval = 5.0
self.heartbeat_timeout = 15.0
# Socket
self.registration_socket = None
self.heartbeat_socket = None
self.command_socket = None
async def initialize(self, endpoint: str = "tcp://*:8000"):
"""初始化实体管理器"""
# 注册socket(ROUTER)
self.registration_socket = self.context.socket(zmq.ROUTER)
self.registration_socket.bind(endpoint)
# 心跳socket(PUB)
self.heartbeat_socket = self.context.socket(zmq.PUB)
heartbeat_endpoint = endpoint.replace("8000", "8001")
self.heartbeat_socket.bind(heartbeat_endpoint)
# 命令socket(DEALER)
self.command_socket = self.context.socket(zmq.DEALER)
command_endpoint = endpoint.replace("8000", "8002")
self.command_socket.bind(command_endpoint)
# 启动处理任务
asyncio.create_task(self._handle_registrations())
asyncio.create_task(self._send_heartbeats())
asyncio.create_task(self._check_entity_health())
print(f"实体管理器初始化完成,端点: {endpoint}")
async def register_entity(self, entity_id: str, entity_type: EntityType,
endpoint: str, capabilities: List[str] = None,
metadata: Dict[str, Any] = None) -> bool:
"""注册实体"""
if entity_id in self.entities:
print(f"实体 {entity_id} 已存在,更新注册")
entity_info = EntityInfo(
entity_id=entity_id,
entity_type=entity_type,
status=EntityStatus.INITIALIZING,
endpoint=endpoint,
capabilities=capabilities or [],
metadata=metadata or {},
last_heartbeat=time.time()
)
self.entities[entity_id] = entity_info
self.type_index[entity_type].add(entity_id)
print(f"实体注册: {entity_id} ({entity_type.value})")
# 通知其他实体
await self._broadcast_entity_update(entity_id, "registered")
return True
async def unregister_entity(self, entity_id: str):
"""注销实体"""
if entity_id in self.entities:
entity_info = self.entities[entity_id]
# 从索引中移除
self.type_index[entity_info.entity_type].discard(entity_id)
# 从订阅关系中移除
for topic, entities in self.topic_subscriptions.items():
entities.discard(entity_id)
# 移除实体
del self.entities[entity_id]
print(f"实体注销: {entity_id}")
# 通知其他实体
await self._broadcast_entity_update(entity_id, "unregistered")
return True
return False
async def update_entity_status(self, entity_id: str, status: EntityStatus):
"""更新实体状态"""
if entity_id in self.entities:
self.entities[entity_id].status = status
self.entities[entity_id].last_heartbeat = time.time()
print(f"实体状态更新: {entity_id} -> {status.value}")
# 通知其他实体
await self._broadcast_entity_update(entity_id, f"status_{status.value}")
return True
return False
async def update_entity_heartbeat(self, entity_id: str):
"""更新实体心跳"""
if entity_id in self.entities:
self.entities[entity_id].last_heartbeat = time.time()
return True
return False
async def subscribe_entity_to_topic(self, entity_id: str, topic: str):
"""实体订阅主题"""
if entity_id in self.entities:
self.topic_subscriptions[topic].add(entity_id)
print(f"实体 {entity_id} 订阅主题: {topic}")
# 通知其他实体
await self._broadcast_subscription_update(entity_id, topic, "subscribed")
return True
return False
async def unsubscribe_entity_from_topic(self, entity_id: str, topic: str):
"""实体取消订阅主题"""
if entity_id in self.entities and topic in self.topic_subscriptions:
self.topic_subscriptions[topic].discard(entity_id)
print(f"实体 {entity_id} 取消订阅主题: {topic}")
# 通知其他实体
await self._broadcast_subscription_update(entity_id, topic, "unsubscribed")
return True
return False
def get_entity(self, entity_id: str) -> Optional[EntityInfo]:
"""获取实体信息"""
return self.entities.get(entity_id)
def get_entities_by_type(self, entity_type: EntityType) -> List[EntityInfo]:
"""按类型获取实体"""
entity_ids = self.type_index.get(entity_type, set())
return [self.entities[eid] for eid in entity_ids if eid in self.entities]
def get_entities_by_capability(self, capability: str) -> List[EntityInfo]:
"""按能力获取实体"""
result = []
for entity in self.entities.values():
if capability in entity.capabilities:
result.append(entity)
return result
def get_topic_subscribers(self, topic: str) -> List[EntityInfo]:
"""获取主题订阅者"""
entity_ids = self.topic_subscriptions.get(topic, set())
return [self.entities[eid] for eid in entity_ids if eid in self.entities]
async def send_command_to_entity(self, entity_id: str, command: Dict[str, Any]) -> Dict[str, Any]:
"""向实体发送命令"""
if entity_id not in self.entities:
return {"status": "error", "message": f"实体不存在: {entity_id}"}
entity_info = self.entities[entity_id]
# 构建命令消息
command_message = {
"type": "command",
"command_id": str(uuid.uuid4()),
"sender": "entity_manager",
"receiver": entity_id,
"timestamp": time.time(),
"data": command
}
try:
# 通过命令socket发送
await self.command_socket.send_multipart([
entity_id.encode(),
pickle.dumps(command_message)
])
# 设置超时等待响应
start_time = time.time()
timeout = command.get("timeout", 5.0)
while time.time() - start_time < timeout:
# 检查响应
try:
# 非阻塞接收
response = await asyncio.wait_for(
self.command_socket.recv_multipart(),
timeout=0.1
)
if len(response) >= 2:
sender_id = response[0].decode()
response_data = pickle.loads(response[1])
if (response_data.get("type") == "command_response" and
response_data.get("command_id") == command_message["command_id"]):
return response_data.get("data", {})
except asyncio.TimeoutError:
continue
except Exception as e:
print(f"接收命令响应错误: {e}")
return {"status": "timeout", "message": "命令响应超时"}
except Exception as e:
return {"status": "error", "message": str(e)}
async def _handle_registrations(self):
"""处理实体注册"""
while True:
try:
# 接收注册消息
frames = await self.registration_socket.recv_multipart()
if len(frames) >= 2:
entity_id = frames[0].decode()
message = pickle.loads(frames[1])
message_type = message.get("type")
if message_type == "register":
# 处理注册
entity_type = EntityType(message["entity_type"])
endpoint = message["endpoint"]
capabilities = message.get("capabilities", [])
metadata = message.get("metadata", {})
await self.register_entity(
entity_id, entity_type, endpoint, capabilities, metadata
)
# 发送响应
response = {
"type": "register_response",
"status": "success",
"entity_id": entity_id,
"timestamp": time.time()
}
await self.registration_socket.send_multipart([
entity_id.encode(),
pickle.dumps(response)
])
elif message_type == "heartbeat":
# 处理心跳
await self.update_entity_heartbeat(entity_id)
# 发送响应
response = {
"type": "heartbeat_response",
"status": "success",
"entity_id": entity_id,
"timestamp": time.time()
}
await self.registration_socket.send_multipart([
entity_id.encode(),
pickle.dumps(response)
])
elif message_type == "subscribe":
# 处理订阅
topic = message["topic"]
await self.subscribe_entity_to_topic(entity_id, topic)
elif message_type == "unsubscribe":
# 处理取消订阅
topic = message["topic"]
await self.unsubscribe_entity_from_topic(entity_id, topic)
elif message_type == "status_update":
# 处理状态更新
status = EntityStatus(message["status"])
await self.update_entity_status(entity_id, status)
except Exception as e:
print(f"处理注册消息错误: {e}")
async def _send_heartbeats(self):
"""发送心跳"""
while True:
try:
# 构建心跳消息
heartbeat_message = {
"type": "heartbeat",
"timestamp": time.time(),
"entity_count": len(self.entities)
}
# 广播心跳
await self.heartbeat_socket.send(pickle.dumps(heartbeat_message))
# 等待下一次心跳
await asyncio.sleep(self.heartbeat_interval)
except Exception as e:
print(f"发送心跳错误: {e}")
await asyncio.sleep(1)
async def _check_entity_health(self):
"""检查实体健康状态"""
while True:
try:
current_time = time.time()
dead_entities = []
# 检查所有实体
for entity_id, entity_info in self.entities.items():
time_since_heartbeat = current_time - entity_info.last_heartbeat
if time_since_heartbeat > self.heartbeat_timeout:
# 实体无响应,标记为死亡
print(f"实体 {entity_id} 无心跳响应,标记为死亡")
dead_entities.append(entity_id)
# 移除死亡实体
for entity_id in dead_entities:
await self.unregister_entity(entity_id)
# 每秒检查一次
await asyncio.sleep(1)
except Exception as e:
print(f"检查实体健康状态错误: {e}")
await asyncio.sleep(5)
async def _broadcast_entity_update(self, entity_id: str, update_type: str):
"""广播实体更新"""
try:
update_message = {
"type": "entity_update",
"update_type": update_type,
"entity_id": entity_id,
"timestamp": time.time()
}
if entity_id in self.entities:
update_message["entity_info"] = {
"entity_type": self.entities[entity_id].entity_type.value,
"status": self.entities[entity_id].status.value,
"endpoint": self.entities[entity_id].endpoint
}
# 广播到系统事件主题
system_event = {
"topic": "system.events",
"data": update_message
}
await self.heartbeat_socket.send_multipart([
b"system.events",
pickle.dumps(system_event)
])
except Exception as e:
print(f"广播实体更新错误: {e}")
async def _broadcast_subscription_update(self, entity_id: str, topic: str, action: str):
"""广播订阅更新"""
try:
update_message = {
"type": "subscription_update",
"entity_id": entity_id,
"topic": topic,
"action": action,
"timestamp": time.time()
}
# 广播到系统事件主题
system_event = {
"topic": "system.events",
"data": update_message
}
await self.heartbeat_socket.send_multipart([
b"system.events",
pickle.dumps(system_event)
])
except Exception as e:
print(f"广播订阅更新错误: {e}")
async def close(self):
"""关闭实体管理器"""
# 关闭所有socket
if self.registration_socket:
self.registration_socket.close()
if self.heartbeat_socket:
self.heartbeat_socket.close()
if self.command_socket:
self.command_socket.close()
# 清除所有实体
self.entities.clear()
self.topic_subscriptions.clear()
self.type_index.clear()
print("实体管理器已关闭")
# 实体客户端
class EntityClient:
"""实体客户端"""
def __init__(self, entity_id: str, entity_type: EntityType,
endpoint: str, manager_endpoint: str = "tcp://localhost:8000",
context=None):
self.entity_id = entity_id
self.entity_type = entity_type
self.endpoint = endpoint
self.manager_endpoint = manager_endpoint
self.context = context or zmq.asyncio.Context()
# Socket
self.registration_socket = None
self.heartbeat_socket = None
self.command_socket = None
# 状态
self.status = EntityStatus.INITIALIZING
self.capabilities = []
self.metadata = {}
# 心跳任务
self.heartbeat_task = None
async def initialize(self, capabilities: List[str] = None, metadata: Dict[str, Any] = None):
"""初始化实体客户端"""
# 注册socket(DEALER)
self.registration_socket = self.context.socket(zmq.DEALER)
self.registration_socket.identity = self.entity_id.encode()
self.registration_socket.connect(self.manager_endpoint)
# 心跳socket(SUB)
heartbeat_endpoint = self.manager_endpoint.replace("8000", "8001")
self.heartbeat_socket = self.context.socket(zmq.SUB)
self.heartbeat_socket.connect(heartbeat_endpoint)
self.heartbeat_socket.setsockopt_string(zmq.SUBSCRIBE, "")
# 命令socket(DEALER)
command_endpoint = self.manager_endpoint.replace("8000", "8002")
self.command_socket = self.context.socket(zmq.DEALER)
self.command_socket.identity = self.entity_id.encode()
self.command_socket.connect(command_endpoint)
# 设置能力
self.capabilities = capabilities or []
self.metadata = metadata or {}
# 注册到管理器
success = await self._register_with_manager()
if success:
self.status = EntityStatus.READY
# 启动心跳
self.heartbeat_task = asyncio.create_task(self._send_heartbeats())
# 启动命令处理
asyncio.create_task(self._handle_commands())
print(f"实体客户端初始化完成: {self.entity_id}")
return True
else:
return False
async def _register_with_manager(self) -> bool:
"""向管理器注册"""
try:
# 构建注册消息
register_message = {
"type": "register",
"entity_id": self.entity_id,
"entity_type": self.entity_type.value,
"endpoint": self.endpoint,
"capabilities": self.capabilities,
"metadata": self.metadata,
"timestamp": time.time()
}
# 发送注册消息
await self.registration_socket.send(pickle.dumps(register_message))
# 等待响应
response_data = await self.registration_socket.recv()
response = pickle.loads(response_data)
if response.get("status") == "success":
print(f"实体注册成功: {self.entity_id}")
return True
else:
print(f"实体注册失败: {response.get('message', '未知错误')}")
return False
except Exception as e:
print(f"注册实体错误: {e}")
return False
async def _send_heartbeats(self):
"""发送心跳"""
while self.status != EntityStatus.STOPPED:
try:
# 发送心跳
heartbeat_message = {
"type": "heartbeat",
"entity_id": self.entity_id,
"timestamp": time.time()
}
await self.registration_socket.send(pickle.dumps(heartbeat_message))
# 等待响应
try:
await asyncio.wait_for(
self.registration_socket.recv(),
timeout=2.0
)
except asyncio.TimeoutError:
print(f"心跳响应超时: {self.entity_id}")
# 等待下一次心跳
await asyncio.sleep(5.0)
except Exception as e:
print(f"发送心跳错误: {e}")
await asyncio.sleep(1)
async def _handle_commands(self):
"""处理命令"""
while self.status != EntityStatus.STOPPED:
try:
# 接收命令
frames = await self.command_socket.recv_multipart()
if len(frames) >= 2:
sender_id = frames[0].decode()
command_message = pickle.loads(frames[1])
if command_message.get("type") == "command":
# 处理命令
response = await self._process_command(command_message)
# 发送响应
response_message = {
"type": "command_response",
"command_id": command_message.get("command_id"),
"sender": self.entity_id,
"receiver": sender_id,
"timestamp": time.time(),
"data": response
}
await self.command_socket.send_multipart([
sender_id.encode(),
pickle.dumps(response_message)
])
except Exception as e:
print(f"处理命令错误: {e}")
await asyncio.sleep(0.1)
async def _process_command(self, command_message: Dict[str, Any]) -> Dict[str, Any]:
"""处理命令"""
command = command_message.get("data", {})
command_type = command.get("type")
if command_type == "get_status":
return await self._handle_get_status_command(command)
elif command_type == "set_parameter":
return await self._handle_set_parameter_command(command)
elif command_type == "start":
return await self._handle_start_command(command)
elif command_type == "stop":
return await self._handle_stop_command(command)
else:
return {"status": "error", "message": f"未知命令类型: {command_type}"}
async def _handle_get_status_command(self, command: Dict[str, Any]) -> Dict[str, Any]:
"""处理获取状态命令"""
status_info = {
"entity_id": self.entity_id,
"entity_type": self.entity_type.value,
"status": self.status.value,
"capabilities": self.capabilities,
"timestamp": time.time()
}
return {"status": "success", "data": status_info}
async def _handle_set_parameter_command(self, command: Dict[str, Any]) -> Dict[str, Any]:
"""处理设置参数命令"""
parameters = command.get("parameters", {})
# 更新实体参数
for key, value in parameters.items():
if key in self.metadata:
self.metadata[key] = value
return {"status": "success", "message": "参数设置成功", "parameters": parameters}
async def _handle_start_command(self, command: Dict[str, Any]) -> Dict[str, Any]:
"""处理启动命令"""
if self.status == EntityStatus.READY or self.status == EntityStatus.STOPPED:
self.status = EntityStatus.RUNNING
return {"status": "success", "message": "实体已启动", "new_status": self.status.value}
else:
return {"status": "error", "message": f"实体当前状态无法启动: {self.status.value}"}
async def _handle_stop_command(self, command: Dict[str, Any]) -> Dict[str, Any]:
"""处理停止命令"""
self.status = EntityStatus.STOPPED
return {"status": "success", "message": "实体已停止", "new_status": self.status.value}
async def subscribe_to_topic(self, topic: str) -> bool:
"""订阅主题"""
try:
subscribe_message = {
"type": "subscribe",
"entity_id": self.entity_id,
"topic": topic,
"timestamp": time.time()
}
await self.registration_socket.send(pickle.dumps(subscribe_message))
return True
except Exception as e:
print(f"订阅主题错误: {e}")
return False
async def update_status(self, new_status: EntityStatus) -> bool:
"""更新状态"""
try:
status_message = {
"type": "status_update",
"entity_id": self.entity_id,
"status": new_status.value,
"timestamp": time.time()
}
await self.registration_socket.send(pickle.dumps(status_message))
self.status = new_status
return True
except Exception as e:
print(f"更新状态错误: {e}")
return False
async def close(self):
"""关闭实体客户端"""
# 停止心跳
if self.heartbeat_task:
self.heartbeat_task.cancel()
try:
await self.heartbeat_task
except asyncio.CancelledError:
pass
# 关闭socket
if self.registration_socket:
self.registration_socket.close()
if self.heartbeat_socket:
self.heartbeat_socket.close()
if self.command_socket:
self.command_socket.close()
self.status = EntityStatus.STOPPED
print(f"实体客户端已关闭: {self.entity_id}")
# 使用示例
async def demo_entity_management():
"""实体管理演示"""
# 创建实体管理器
manager = EntityManager()
await manager.initialize("tcp://*:9000")
# 创建雷达发射机实体
radar_emitter = EntityClient(
entity_id="radar_001",
entity_type=EntityType.RADAR_EMITTER,
endpoint="tcp://localhost:9101",
manager_endpoint="tcp://localhost:9000"
)
# 初始化雷达发射机
await radar_emitter.initialize(
capabilities=["pulse_generation", "frequency_hopping"],
metadata={"frequency_range": "1-10GHz", "power": "100dBm"}
)
# 创建雷达接收机实体
radar_receiver = EntityClient(
entity_id="receiver_001",
entity_type=EntityType.RADAR_RECEIVER,
endpoint="tcp://localhost:9102",
manager_endpoint="tcp://localhost:9000"
)
await radar_receiver.initialize(
capabilities=["signal_processing", "pulse_detection"],
metadata={"sensitivity": "-100dBm", "bandwidth": "100MHz"}
)
# 等待实体注册
await asyncio.sleep(1)
# 获取所有雷达发射机
emitters = manager.get_entities_by_type(EntityType.RADAR_EMITTER)
print(f"找到 {len(emitters)} 个雷达发射机")
for emitter in emitters:
print(f" - {emitter.entity_id}: {emitter.status.value}")
# 发送控制命令
command = {
"type": "get_status",
"parameters": {}
}
response = await manager.send_command_to_entity("radar_001", command)
print(f"控制命令响应: {response}")
# 实体订阅主题
await radar_emitter.subscribe_to_topic("radar.pulses")
await radar_receiver.subscribe_to_topic("radar.pulses")
# 获取主题订阅者
subscribers = manager.get_topic_subscribers("radar.pulses")
print(f"主题 'radar.pulses' 有 {len(subscribers)} 个订阅者")
# 运行一段时间
await asyncio.sleep(3)
# 清理
await radar_emitter.close()
await radar_receiver.close()
# 等待管理器清理
await asyncio.sleep(2)
# 关闭管理器
await manager.close()
print("实体管理演示完成")
# 运行演示
if __name__ == "__main__":
asyncio.run(demo_entity_management())4.2.2 消息路由器
消息路由器负责在复杂的网络拓扑中智能路由消息:
python
import asyncio
import zmq.asyncio
from typing import Dict, List, Any, Optional, Set, Callable, Tuple
from dataclasses import dataclass, field
from enum import Enum
import uuid
import time
import json
import hashlib
from collections import defaultdict, deque
import heapq
class MessagePriority(Enum):
"""消息优先级"""
CRITICAL = 0 # 系统控制、心跳
HIGH = 1 # 实时控制指令
NORMAL = 2 # 常规数据
LOW = 3 # 日志、批量数据
BACKGROUND = 4 # 维护、备份
@dataclass(order=True)
class RoutedMessage:
"""路由消息"""
priority: int
timestamp: float
message_id: str = field(compare=False)
source: str = field(compare=False)
destination: str = field(compare=False)
topic: str = field(compare=False)
data: Any = field(compare=False)
ttl: int = field(compare=False, default=10) # 跳数限制
def __post_init__(self):
if self.message_id is None:
self.message_id = str(uuid.uuid4())
if self.timestamp is None:
self.timestamp = time.time()
class RoutingStrategy(Enum):
"""路由策略"""
DIRECT = "direct" # 直接路由
BROADCAST = "broadcast" # 广播
MULTICAST = "multicast" # 组播
ANYCAST = "anycast" # 任播
LOAD_BALANCE = "load_balance" # 负载均衡
class MessageRouter:
"""消息路由器"""
def __init__(self, router_id: str, context=None):
self.router_id = router_id
self.context = context or zmq.asyncio.Context()
# 路由表
self.routing_table: Dict[str, Dict[str, Any]] = {} # destination -> {next_hop, cost, last_update}
# 邻居信息
self.neighbors: Dict[str, Dict[str, Any]] = {} # neighbor_id -> {endpoint, latency, reliability}
# 消息队列
self.message_queues: Dict[str, List[RoutedMessage]] = defaultdict(list)
# 消息历史(用于去重)
self.message_history: Dict[str, float] = {} # message_id -> timestamp
self.history_max_size = 10000
# Socket
self.router_socket = None # ROUTER socket
self.dealer_socket = None # DEALER socket
# 统计
self.stats = {
"messages_routed": 0,
"messages_dropped": 0,
"average_latency": 0.0,
"peak_throughput": 0.0
}
# 路由算法
self.routing_algorithm = "link_state" # 或 "distance_vector"
async def initialize(self, router_endpoint: str = "tcp://*:10000",
dealer_endpoint: str = "tcp://*:10001"):
"""初始化路由器"""
# ROUTER socket用于接收消息
self.router_socket = self.context.socket(zmq.ROUTER)
self.router_socket.identity = self.router_id.encode()
self.router_socket.bind(router_endpoint)
# DEALER socket用于发送消息
self.dealer_socket = self.context.socket(zmq.DEALER)
self.dealer_socket.identity = f"{self.router_id}_dealer".encode()
self.dealer_socket.bind(dealer_endpoint)
# 启动处理任务
asyncio.create_task(self._handle_incoming_messages())
asyncio.create_task(self._handle_outgoing_messages())
asyncio.create_task(self._update_routing_table())
asyncio.create_task(self._exchange_routing_info())
print(f"消息路由器 {self.router_id} 初始化完成")
print(f" 路由器端点: {router_endpoint}")
print(f" 经销商端点: {dealer_endpoint}")
async def add_neighbor(self, neighbor_id: str, endpoint: str,
cost: float = 1.0, reliability: float = 0.99):
"""添加邻居"""
self.neighbors[neighbor_id] = {
"endpoint": endpoint,
"cost": cost,
"reliability": reliability,
"last_seen": time.time(),
"latency_samples": deque(maxlen=10)
}
# 添加到路由表
self.routing_table[neighbor_id] = {
"next_hop": neighbor_id,
"cost": cost,
"last_update": time.time()
}
print(f"添加邻居: {neighbor_id} (端点: {endpoint}, 成本: {cost})")
# 发送路由更新
await self._send_routing_update()
async def remove_neighbor(self, neighbor_id: str):
"""移除邻居"""
if neighbor_id in self.neighbors:
del self.neighbors[neighbor_id]
# 从路由表中移除相关条目
destinations_to_remove = []
for dest, route in self.routing_table.items():
if route["next_hop"] == neighbor_id:
destinations_to_remove.append(dest)
for dest in destinations_to_remove:
del self.routing_table[dest]
print(f"移除邻居: {neighbor_id}")
async def route_message(self, message: RoutedMessage,
strategy: RoutingStrategy = RoutingStrategy.DIRECT) -> bool:
"""路由消息"""
# 检查TTL
if message.ttl <= 0:
print(f"消息 {message.message_id} TTL过期,丢弃")
self.stats["messages_dropped"] += 1
return False
# 检查消息历史(防止循环)
if message.message_id in self.message_history:
# 消息已处理过,丢弃
self.stats["messages_dropped"] += 1
return False
# 添加到消息历史
self.message_history[message.message_id] = time.time()
if len(self.message_history) > self.history_max_size:
# 清理旧记录
oldest = min(self.message_history.items(), key=lambda x: x[1])[0]
del self.message_history[oldest]
# 确定目的地
destinations = await self._determine_destinations(message, strategy)
if not destinations:
print(f"消息 {message.message_id} 无有效目的地,丢弃")
self.stats["messages_dropped"] += 1
return False
# 路由到每个目的地
routed_count = 0
for dest in destinations:
success = await self._route_to_destination(message, dest)
if success:
routed_count += 1
if routed_count > 0:
self.stats["messages_routed"] += 1
return True
else:
self.stats["messages_dropped"] += 1
return False
async def _determine_destinations(self, message: RoutedMessage,
strategy: RoutingStrategy) -> List[str]:
"""确定目的地列表"""
destinations = []
if strategy == RoutingStrategy.DIRECT:
# 直接路由到指定目的地
if message.destination in self.routing_table:
destinations.append(message.destination)
elif strategy == RoutingStrategy.BROADCAST:
# 广播到所有邻居
destinations = list(self.neighbors.keys())
elif strategy == RoutingStrategy.MULTICAST:
# 组播到指定组
# 这里简化实现:查找所有包含特定前缀的节点
group_prefix = message.destination.split('.')[0]
for dest in self.routing_table.keys():
if dest.startswith(group_prefix):
destinations.append(dest)
elif strategy == RoutingStrategy.ANYCAST:
# 任播:路由到任意一个符合条件的节点
if self.routing_table:
# 选择成本最低的节点
best_dest = min(
self.routing_table.items(),
key=lambda x: x[1]["cost"]
)[0]
destinations.append(best_dest)
elif strategy == RoutingStrategy.LOAD_BALANCE:
# 负载均衡:路由到负载最低的节点
# 这里简化实现:选择最近最少使用的节点
if self.routing_table:
# 使用简单的轮询
all_dests = list(self.routing_table.keys())
if all_dests:
# 这里可以使用更复杂的负载均衡算法
destinations.append(all_dests[0])
return destinations
async def _route_to_destination(self, message: RoutedMessage, destination: str) -> bool:
"""路由到特定目的地"""
if destination not in self.routing_table:
print(f"目的地 {destination} 不在路由表中")
return False
route_info = self.routing_table[destination]
next_hop = route_info["next_hop"]
if next_hop not in self.neighbors:
print(f"下一跳 {next_hop} 不是邻居")
return False
neighbor_info = self.neighbors[next_hop]
# 构建路由消息
routed_message = {
"type": "routed_message",
"router_id": self.router_id,
"message_id": message.message_id,
"source": message.source,
"destination": message.destination,
"topic": message.topic,
"data": message.data,
"ttl": message.ttl - 1,
"timestamp": time.time(),
"priority": message.priority,
"routing_path": [self.router_id] # 记录路径
}
try:
# 发送到下一跳
message_data = json.dumps(routed_message).encode('utf-8')
# 通过DEALER socket发送
await self.dealer_socket.send_multipart([
next_hop.encode(),
b"", # 空帧
message_data
])
print(f"路由消息 {message.message_id} 到 {destination} via {next_hop}")
return True
except Exception as e:
print(f"路由消息到 {destination} 错误: {e}")
return False
async def _handle_incoming_messages(self):
"""处理入站消息"""
while True:
try:
# 接收消息
frames = await self.router_socket.recv_multipart()
if len(frames) >= 3:
sender_id = frames[0].decode()
empty_frame = frames[1] # 应该是空帧
message_data = frames[2]
message = json.loads(message_data.decode('utf-8'))
message_type = message.get("type")
if message_type == "routed_message":
# 处理路由消息
await self._process_routed_message(sender_id, message)
elif message_type == "routing_update":
# 处理路由更新
await self._process_routing_update(sender_id, message)
elif message_type == "ping":
# 处理ping消息
await self._process_ping(sender_id, message)
elif message_type == "data":
# 处理数据消息
await self._process_data_message(sender_id, message)
except Exception as e:
print(f"处理入站消息错误: {e}")
await asyncio.sleep(0.1)
async def _process_routed_message(self, sender_id: str, message: Dict[str, Any]):
"""处理路由消息"""
# 检查是否是本路由器
if message["destination"] == self.router_id:
# 消息到达目的地
print(f"消息 {message['message_id']} 到达目的地")
# 这里可以调用消息处理回调
await self._deliver_message(message)
else:
# 需要继续路由
routed_message = RoutedMessage(
priority=message.get("priority", MessagePriority.NORMAL.value),
timestamp=message["timestamp"],
message_id=message["message_id"],
source=message["source"],
destination=message["destination"],
topic=message.get("topic", ""),
data=message["data"],
ttl=message.get("ttl", 10)
)
# 添加当前路由器到路径
if "routing_path" in message:
message["routing_path"].append(self.router_id)
# 继续路由
await self.route_message(routed_message)
async def _process_routing_update(self, sender_id: str, message: Dict[str, Any]):
"""处理路由更新"""
if sender_id not in self.neighbors:
print(f"收到未知邻居 {sender_id} 的路由更新")
return
# 更新邻居信息
neighbor_info = self.neighbors[sender_id]
neighbor_info["last_seen"] = time.time()
if "latency" in message:
neighbor_info["latency_samples"].append(message["latency"])
if neighbor_info["latency_samples"]:
neighbor_info["cost"] = sum(neighbor_info["latency_samples"]) / len(neighbor_info["latency_samples"])
# 更新路由表
routes = message.get("routes", {})
for dest, route_info in routes.items():
new_cost = route_info["cost"] + neighbor_info["cost"]
if dest not in self.routing_table or new_cost < self.routing_table[dest]["cost"]:
self.routing_table[dest] = {
"next_hop": sender_id,
"cost": new_cost,
"last_update": time.time()
}
async def _process_ping(self, sender_id: str, message: Dict[str, Any]):
"""处理ping消息"""
ping_time = message.get("timestamp")
if ping_time:
latency = time.time() - ping_time
# 发送pong响应
pong_message = {
"type": "pong",
"timestamp": time.time(),
"original_timestamp": ping_time,
"latency": latency
}
pong_data = json.dumps(pong_message).encode('utf-8')
await self.router_socket.send_multipart([
sender_id.encode(),
b"",
pong_data
])
# 更新邻居延迟
if sender_id in self.neighbors:
self.neighbors[sender_id]["latency_samples"].append(latency)
async def _process_data_message(self, sender_id: str, message: Dict[str, Any]):
"""处理数据消息"""
# 这里可以处理直接发送到本路由器的数据消息
print(f"收到数据消息: {message.get('message_id', 'unknown')}")
# 调用消息处理回调
await self._deliver_message(message)
async def _deliver_message(self, message: Dict[str, Any]):
"""投递消息"""
# 这里可以添加消息处理逻辑
# 例如:调用注册的回调函数,或将消息放入处理队列
pass
async def _handle_outgoing_messages(self):
"""处理出站消息"""
while True:
try:
# 检查每个队列
for destination, queue in self.message_queues.items():
if queue:
# 获取优先级最高的消息
message = heapq.heappop(queue)
# 路由消息
await self.route_message(message)
# 短暂休眠
await asyncio.sleep(0.01)
except Exception as e:
print(f"处理出站消息错误: {e}")
await asyncio.sleep(0.1)
async def _update_routing_table(self):
"""更新路由表"""
while True:
try:
current_time = time.time()
# 清理过期的路由条目
expired_destinations = []
for dest, route in self.routing_table.items():
if current_time - route["last_update"] > 30: # 30秒过期
expired_destinations.append(dest)
for dest in expired_destinations:
del self.routing_table[dest]
# 清理不活跃的邻居
inactive_neighbors = []
for neighbor_id, info in self.neighbors.items():
if current_time - info["last_seen"] > 60: # 60秒不活跃
inactive_neighbors.append(neighbor_id)
for neighbor_id in inactive_neighbors:
await self.remove_neighbor(neighbor_id)
# 更新统计
self._update_statistics()
# 每5秒更新一次
await asyncio.sleep(5)
except Exception as e:
print(f"更新路由表错误: {e}")
await asyncio.sleep(5)
async def _exchange_routing_info(self):
"""交换路由信息"""
while True:
try:
# 构建路由更新消息
routing_update = {
"type": "routing_update",
"router_id": self.router_id,
"timestamp": time.time(),
"routes": {}
}
# 添加路由条目
for dest, route in self.routing_table.items():
routing_update["routes"][dest] = {
"next_hop": route["next_hop"],
"cost": route["cost"]
}
# 发送给所有邻居
for neighbor_id in self.neighbors.keys():
update_data = json.dumps(routing_update).encode('utf-8')
await self.router_socket.send_multipart([
neighbor_id.encode(),
b"",
update_data
])
# 每10秒交换一次
await asyncio.sleep(10)
except Exception as e:
print(f"交换路由信息错误: {e}")
await asyncio.sleep(10)
async def send_ping(self, neighbor_id: str) -> Optional[float]:
"""发送ping测量延迟"""
if neighbor_id not in self.neighbors:
return None
ping_message = {
"type": "ping",
"timestamp": time.time(),
"router_id": self.router_id
}
ping_data = json.dumps(ping_message).encode('utf-8')
try:
# 发送ping
await self.router_socket.send_multipart([
neighbor_id.encode(),
b"",
ping_data
])
# 等待pong响应
start_time = time.time()
timeout = 5.0
while time.time() - start_time < timeout:
# 这里简化实现,实际应该使用更复杂的机制
await asyncio.sleep(0.1)
# 这里应该处理pong响应
return None
except Exception as e:
print(f"发送ping错误: {e}")
return None
async def queue_message(self, destination: str, topic: str, data: Any,
priority: MessagePriority = MessagePriority.NORMAL,
ttl: int = 10) -> str:
"""排队消息"""
message = RoutedMessage(
priority=priority.value,
timestamp=time.time(),
message_id=None, # 自动生成
source=self.router_id,
destination=destination,
topic=topic,
data=data,
ttl=ttl
)
# 添加到队列
heapq.heappush(self.message_queues[destination], message)
return message.message_id
def _update_statistics(self):
"""更新统计信息"""
# 这里可以更新各种统计信息
pass
def get_routing_table(self) -> Dict[str, Dict[str, Any]]:
"""获取路由表"""
return self.routing_table.copy()
def get_neighbors(self) -> Dict[str, Dict[str, Any]]:
"""获取邻居信息"""
return self.neighbors.copy()
def get_statistics(self) -> Dict[str, Any]:
"""获取统计信息"""
return self.stats.copy()
async def close(self):
"""关闭路由器"""
# 关闭socket
if self.router_socket:
self.router_socket.close()
if self.dealer_socket:
self.dealer_socket.close()
print(f"消息路由器 {self.router_id} 已关闭")
# 路由网络演示
async def demo_routing_network():
"""路由网络演示"""
# 创建多个路由器
routers = {}
# 路由器配置
router_configs = [
{"id": "router1", "port": 11000},
{"id": "router2", "port": 11010},
{"id": "router3", "port": 11020},
{"id": "router4", "port": 11030}
]
# 初始化所有路由器
for config in router_configs:
router = MessageRouter(config["id"])
await router.initialize(
router_endpoint=f"tcp://*:{config['port']}",
dealer_endpoint=f"tcp://*:{config['port'] + 1}"
)
routers[config["id"]] = router
# 等待路由器启动
await asyncio.sleep(1)
# 建立邻居关系
# router1 <-> router2
await routers["router1"].add_neighbor("router2", "tcp://localhost:11010")
await routers["router2"].add_neighbor("router1", "tcp://localhost:11000")
# router2 <-> router3
await routers["router2"].add_neighbor("router3", "tcp://localhost:11020")
await routers["router3"].add_neighbor("router2", "tcp://localhost:11010")
# router3 <-> router4
await routers["router3"].add_neighbor("router4", "tcp://localhost:11030")
await routers["router4"].add_neighbor("router3", "tcp://localhost:11020")
# router4 <-> router1
await routers["router4"].add_neighbor("router1", "tcp://localhost:11000")
await routers["router1"].add_neighbor("router4", "tcp://localhost:11030")
print("邻居关系建立完成")
# 等待路由表收敛
await asyncio.sleep(3)
# 显示每个路由器的路由表
for router_id, router in routers.items():
routing_table = router.get_routing_table()
print(f"\n{router_id} 路由表:")
for dest, route in routing_table.items():
print(f" 目的地: {dest}, 下一跳: {route['next_hop']}, 成本: {route['cost']:.3f}")
# 发送测试消息
test_message = {
"type": "test",
"content": "Hello Routing Network!",
"timestamp": time.time()
}
# 从router1发送消息到router3
message_id = await routers["router1"].queue_message(
destination="router3",
topic="test.message",
data=test_message,
priority=MessagePriority.NORMAL,
ttl=10
)
print(f"\n发送测试消息 {message_id} 从 router1 到 router3")
# 等待消息传递
await asyncio.sleep(2)
# 显示统计信息
for router_id, router in routers.items():
stats = router.get_statistics()
print(f"\n{router_id} 统计:")
print(f" 路由消息数: {stats['messages_routed']}")
print(f" 丢弃消息数: {stats['messages_dropped']}")
# 清理
for router in routers.values():
await router.close()
print("\n路由网络演示完成")
# 运行演示
if __name__ == "__main__":
asyncio.run(demo_routing_network())4.2.3 连接池管理器
连接池管理器负责管理和复用ZeroMQ连接,提高性能和资源利用率:
python
import asyncio
import zmq.asyncio
from typing import Dict, List, Any, Optional, Set, Tuple
from dataclasses import dataclass, field
from enum import Enum
import time
import threading
from concurrent.futures import ThreadPoolExecutor
import hashlib
import json
from collections import defaultdict, deque
import heapq
class ConnectionType(Enum):
"""连接类型"""
REQ = "request" # 请求
REP = "reply" # 响应
PUB = "publish" # 发布
SUB = "subscribe" # 订阅
PUSH = "push" # 推送
PULL = "pull" # 拉取
DEALER = "dealer" # 经销商
ROUTER = "router" # 路由器
PAIR = "pair" # 对等
@dataclass
class ConnectionConfig:
"""连接配置"""
endpoint: str
connection_type: ConnectionType
identity: Optional[str] = None
timeout: float = 5.0
heartbeat_interval: float = 10.0
max_retries: int = 3
retry_delay: float = 1.0
socket_options: Dict[str, Any] = field(default_factory=dict)
def get_hash(self) -> str:
"""获取配置哈希值"""
config_str = f"{self.endpoint}:{self.connection_type.value}:{self.identity}"
return hashlib.md5(config_str.encode()).hexdigest()
@dataclass
class ConnectionInfo:
"""连接信息"""
connection_id: str
config: ConnectionConfig
socket: Any
context: Any
created_at: float
last_used: float
usage_count: int
is_connected: bool
error_count: int
metadata: Dict[str, Any] = field(default_factory=dict)
class ConnectionPool:
"""连接池"""
def __init__(self, max_pool_size: int = 100, max_idle_time: float = 300.0):
self.max_pool_size = max_pool_size
self.max_idle_time = max_idle_time
# 连接池
self.connections: Dict[str, ConnectionInfo] = {}
# 按配置哈希分组
self.connections_by_config: Dict[str, List[str]] = defaultdict(list)
# 空闲连接队列
self.idle_connections: List[Tuple[float, str]] = [] # (last_used, connection_id)
# 活跃连接计数
self.active_connections: Set[str] = set()
# 上下文
self.context = zmq.asyncio.Context()
# 锁
self.lock = threading.RLock()
# 统计
self.stats = {
"connections_created": 0,
"connections_reused": 0,
"connections_closed": 0,
"connection_errors": 0,
"pool_hit_rate": 0.0
}
# 清理任务
self.cleanup_task = None
async def initialize(self):
"""初始化连接池"""
# 启动清理任务
self.cleanup_task = asyncio.create_task(self._cleanup_idle_connections())
print(f"连接池初始化完成,最大大小: {self.max_pool_size}")
async def get_connection(self, config: ConnectionConfig) -> ConnectionInfo:
"""获取连接"""
config_hash = config.get_hash()
with self.lock:
# 检查是否有可用的连接
if config_hash in self.connections_by_config:
for connection_id in self.connections_by_config[config_hash]:
connection = self.connections[connection_id]
if (connection.is_connected and
connection_id not in self.active_connections):
# 更新使用信息
connection.last_used = time.time()
connection.usage_count += 1
# 从空闲队列移除
self._remove_from_idle_queue(connection_id)
# 添加到活跃集合
self.active_connections.add(connection_id)
self.stats["connections_reused"] += 1
self._update_hit_rate()
print(f"复用连接: {connection_id} ({config.connection_type.value})")
return connection
# 创建新连接
if len(self.connections) >= self.max_pool_size:
# 池已满,清理最旧的空闲连接
await self._evict_oldest_idle_connection()
connection = await self._create_connection(config)
if connection:
# 添加到池中
self.connections[connection.connection_id] = connection
self.connections_by_config[config_hash].append(connection.connection_id)
self.active_connections.add(connection.connection_id)
self.stats["connections_created"] += 1
self._update_hit_rate()
print(f"创建新连接: {connection.connection_id} ({config.connection_type.value})")
return connection
raise ConnectionError(f"无法创建连接: {config.endpoint}")
async def _create_connection(self, config: ConnectionConfig) -> Optional[ConnectionInfo]:
"""创建新连接"""
connection_id = f"conn_{len(self.connections)}_{int(time.time())}"
try:
# 创建socket
socket_type = getattr(zmq, config.connection_type.value.upper())
socket = self.context.socket(socket_type)
# 设置身份
if config.identity:
socket.identity = config.identity.encode()
# 设置socket选项
for option, value in config.socket_options.items():
if hasattr(zmq, option):
socket.setsockopt(getattr(zmq, option), value)
# 连接或绑定
if config.connection_type in [ConnectionType.REP, ConnectionType.PUB,
ConnectionType.PULL, ConnectionType.ROUTER]:
# 绑定
socket.bind(config.endpoint)
else:
# 连接
socket.connect(config.endpoint)
# 等待连接建立
await asyncio.sleep(0.1)
# 创建连接信息
connection = ConnectionInfo(
connection_id=connection_id,
config=config,
socket=socket,
context=self.context,
created_at=time.time(),
last_used=time.time(),
usage_count=1,
is_connected=True,
error_count=0
)
return connection
except Exception as e:
print(f"创建连接错误: {e}")
self.stats["connection_errors"] += 1
return None
async def release_connection(self, connection_id: str):
"""释放连接回池中"""
with self.lock:
if connection_id in self.connections and connection_id in self.active_connections:
connection = self.connections[connection_id]
# 检查连接是否仍然健康
if not await self._check_connection_health(connection):
# 连接不健康,关闭它
await self.close_connection(connection_id)
return
# 从活跃集合移除
self.active_connections.discard(connection_id)
# 添加到空闲队列
heapq.heappush(self.idle_connections, (connection.last_used, connection_id))
print(f"释放连接: {connection_id}")
async def close_connection(self, connection_id: str):
"""关闭连接"""
with self.lock:
if connection_id in self.connections:
connection = self.connections[connection_id]
try:
# 关闭socket
connection.socket.close()
# 从数据结构中移除
config_hash = connection.config.get_hash()
if connection_id in self.connections_by_config.get(config_hash, []):
self.connections_by_config[config_hash].remove(connection_id)
if config_hash in self.connections_by_config and not self.connections_by_config[config_hash]:
del self.connections_by_config[config_hash]
del self.connections[connection_id]
self.active_connections.discard(connection_id)
self._remove_from_idle_queue(connection_id)
self.stats["connections_closed"] += 1
self._update_hit_rate()
print(f"关闭连接: {connection_id}")
except Exception as e:
print(f"关闭连接错误: {e}")
async def _check_connection_health(self, connection: ConnectionInfo) -> bool:
"""检查连接健康状态"""
try:
# 对于REQ/REP连接,发送ping测试
if connection.config.connection_type in [ConnectionType.REQ, ConnectionType.DEALER]:
# 设置超时
connection.socket.setsockopt(zmq.RCVTIMEO, 1000) # 1秒
# 发送ping
ping_msg = {"type": "ping", "timestamp": time.time()}
await connection.socket.send(json.dumps(ping_msg).encode())
# 尝试接收响应
try:
response = await connection.socket.recv()
return True
except zmq.Again:
# 超时,连接可能有问题
connection.error_count += 1
return False
elif connection.config.connection_type in [ConnectionType.SUB, ConnectionType.PULL]:
# 对于SUB/PULL,检查是否还能接收消息
connection.socket.setsockopt(zmq.RCVTIMEO, 100)
try:
# 尝试接收消息(不阻塞)
await connection.socket.recv(flags=zmq.NOBLOCK)
return True
except zmq.Again:
# 没有消息是正常的
return True
except Exception:
connection.error_count += 1
return False
else:
# 其他类型连接,简单返回True
return True
except Exception as e:
print(f"检查连接健康状态错误: {e}")
connection.error_count += 1
return False
async def _cleanup_idle_connections(self):
"""清理空闲连接"""
while True:
try:
await asyncio.sleep(60) # 每分钟检查一次
with self.lock:
current_time = time.time()
# 清理空闲时间过长的连接
while self.idle_connections:
last_used, connection_id = self.idle_connections[0]
if current_time - last_used > self.max_idle_time:
# 连接空闲时间过长,关闭它
heapq.heappop(self.idle_connections)
await self.close_connection(connection_id)
else:
break
# 清理错误过多的连接
connections_to_close = []
for connection_id, connection in self.connections.items():
if connection.error_count >= 3:
connections_to_close.append(connection_id)
for connection_id in connections_to_close:
await self.close_connection(connection_id)
except Exception as e:
print(f"清理空闲连接错误: {e}")
await asyncio.sleep(5)
async def _evict_oldest_idle_connection(self):
"""驱逐最旧的空闲连接"""
with self.lock:
if self.idle_connections:
_, connection_id = heapq.heappop(self.idle_connections)
await self.close_connection(connection_id)
print(f"驱逐空闲连接: {connection_id}")
def _remove_from_idle_queue(self, connection_id: str):
"""从空闲队列中移除连接"""
for i, (_, cid) in enumerate(self.idle_connections):
if cid == connection_id:
self.idle_connections.pop(i)
heapq.heapify(self.idle_connections)
break
def _update_hit_rate(self):
"""更新命中率"""
total = self.stats["connections_created"] + self.stats["connections_reused"]
if total > 0:
self.stats["pool_hit_rate"] = self.stats["connections_reused"] / total
async def send_message(self, config: ConnectionConfig, message: Any,
timeout: float = None) -> Any:
"""发送消息(自动管理连接)"""
if timeout is None:
timeout = config.timeout
connection = None
try:
# 获取连接
connection = await self.get_connection(config)
# 序列化消息
if isinstance(message, (dict, list)):
message_data = json.dumps(message).encode()
elif isinstance(message, str):
message_data = message.encode()
elif isinstance(message, bytes):
message_data = message
else:
message_data = pickle.dumps(message)
# 发送消息
start_time = time.time()
if config.connection_type in [ConnectionType.REQ, ConnectionType.DEALER]:
# 设置超时
connection.socket.setsockopt(zmq.RCVTIMEO, int(timeout * 1000))
# 发送请求
await connection.socket.send(message_data)
# 接收响应
response_data = await connection.socket.recv()
# 反序列化响应
try:
response = json.loads(response_data.decode())
except:
response = response_data
return response
elif config.connection_type in [ConnectionType.PUB, ConnectionType.PUSH]:
# 单向发送
await connection.socket.send(message_data)
return {"status": "sent", "timestamp": time.time()}
elif config.connection_type in [ConnectionType.SUB, ConnectionType.PULL]:
# 接收模式
connection.socket.setsockopt(zmq.RCVTIMEO, int(timeout * 1000))
try:
response_data = await connection.socket.recv()
try:
response = json.loads(response_data.decode())
except:
response = response_data
return response
except zmq.Again:
return {"status": "timeout", "message": "接收超时"}
else:
raise ValueError(f"不支持的连接类型: {config.connection_type}")
except Exception as e:
print(f"发送消息错误: {e}")
if connection:
connection.error_count += 1
raise
finally:
if connection:
await self.release_connection(connection.connection_id)
def get_pool_stats(self) -> Dict[str, Any]:
"""获取连接池统计信息"""
with self.lock:
stats = self.stats.copy()
stats.update({
"total_connections": len(self.connections),
"active_connections": len(self.active_connections),
"idle_connections": len(self.idle_connections),
"connections_by_type": defaultdict(int)
})
# 按类型统计
for connection in self.connections.values():
stats["connections_by_type"][connection.config.connection_type.value] += 1
return stats
async def close_all_connections(self):
"""关闭所有连接"""
with self.lock:
connection_ids = list(self.connections.keys())
for connection_id in connection_ids:
await self.close_connection(connection_id)
print(f"已关闭所有连接,共 {len(connection_ids)} 个")
async def shutdown(self):
"""关闭连接池"""
if self.cleanup_task:
self.cleanup_task.cancel()
try:
await self.cleanup_task
except asyncio.CancelledError:
pass
await self.close_all_connections()
if hasattr(self.context, 'term'):
self.context.term()
print("连接池已关闭")
# 连接池使用示例
async def demo_connection_pool():
"""连接池演示"""
# 创建连接池
pool = ConnectionPool(max_pool_size=10, max_idle_time=60.0)
await pool.initialize()
# 创建多个连接配置
configs = [
ConnectionConfig(
endpoint="tcp://localhost:12000",
connection_type=ConnectionType.REQ,
timeout=3.0,
socket_options={"LINGER": 0, "SNDTIMEO": 1000}
),
ConnectionConfig(
endpoint="tcp://localhost:12001",
connection_type=ConnectionType.SUB,
socket_options={"SUBSCRIBE": b"", "RCVTIMEO": 1000}
),
ConnectionConfig(
endpoint="tcp://localhost:12002",
connection_type=ConnectionType.PUSH,
socket_options={"SNDHWM": 1000}
)
]
# 模拟多个并发请求
async def send_request(config_idx: int, request_id: int):
config = configs[config_idx]
message = {
"request_id": request_id,
"type": "test",
"timestamp": time.time()
}
try:
response = await pool.send_message(config, message, timeout=2.0)
print(f"请求 {request_id} 响应: {response}")
except Exception as e:
print(f"请求 {request_id} 错误: {e}")
# 创建并发任务
tasks = []
for i in range(20):
config_idx = i % len(configs)
task = asyncio.create_task(send_request(config_idx, i))
tasks.append(task)
# 等待所有任务完成
await asyncio.gather(*tasks, return_exceptions=True)
# 显示统计信息
stats = pool.get_pool_stats()
print(f"\n连接池统计:")
for key, value in stats.items():
if isinstance(value, dict):
print(f" {key}:")
for sub_key, sub_value in value.items():
print(f" {sub_key}: {sub_value}")
else:
print(f" {key}: {value}")
# 关闭连接池
await pool.shutdown()
print("连接池演示完成")
# 运行演示
if __name__ == "__main__":
asyncio.run(demo_connection_pool())5. 性能优化与高级特性
5.1 ZeroMQ性能调优
python
import zmq
import time
import json
import numpy as np
from typing import Dict, Any, List
import threading
import multiprocessing as mp
from concurrent.futures import ThreadPoolExecutor, ProcessPoolExecutor
class ZeroMQPerformanceOptimizer:
"""ZeroMQ性能优化器"""
def __init__(self):
self.optimizations = {}
def benchmark_basic_performance(self, message_size: int = 1024,
iterations: int = 10000) -> Dict[str, Any]:
"""基准性能测试"""
results = {}
# 测试不同模式
modes = ["inproc", "ipc", "tcp"]
for mode in modes:
mode_results = self._benchmark_mode(mode, message_size, iterations)
results[mode] = mode_results
return results
def _benchmark_mode(self, mode: str, message_size: int,
iterations: int) -> Dict[str, Any]:
"""测试特定模式"""
context = zmq.Context()
if mode == "inproc":
endpoint = "inproc://benchmark"
elif mode == "ipc":
endpoint = "ipc:///tmp/zmq_benchmark"
else: # tcp
endpoint = "tcp://127.0.0.1:13000"
# 创建测试数据
test_data = b"X" * message_size
# 测试请求-响应
reqrep_time = self._benchmark_req_rep(context, endpoint, test_data, iterations)
# 测试发布-订阅
pubsub_time = self._benchmark_pub_sub(context, endpoint, test_data, iterations)
# 测试推送-拉取
pushpull_time = self._benchmark_push_pull(context, endpoint, test_data, iterations)
context.term()
return {
"reqrep_latency_ms": reqrep_time * 1000 / iterations if iterations > 0 else 0,
"pubsub_latency_ms": pubsub_time * 1000 / iterations if iterations > 0 else 0,
"pushpull_latency_ms": pushpull_time * 1000 / iterations if iterations > 0 else 0,
"reqrep_throughput_msg_s": iterations / reqrep_time if reqrep_time > 0 else 0,
"pubsub_throughput_msg_s": iterations / pubsub_time if pubsub_time > 0 else 0,
"pushpull_throughput_msg_s": iterations / pushpull_time if pushpull_time > 0 else 0
}
def _benchmark_req_rep(self, context, endpoint: str,
test_data: bytes, iterations: int) -> float:
"""基准测试请求-响应模式"""
# 创建响应socket
rep_socket = context.socket(zmq.REP)
rep_socket.bind(endpoint)
# 创建请求socket
req_socket = context.socket(zmq.REQ)
req_socket.connect(endpoint)
# 启动响应线程
def responder():
for _ in range(iterations):
message = rep_socket.recv()
rep_socket.send(message)
responder_thread = threading.Thread(target=responder)
responder_thread.start()
# 等待连接建立
time.sleep(0.1)
# 基准测试
start_time = time.time()
for _ in range(iterations):
req_socket.send(test_data)
response = req_socket.recv()
end_time = time.time()
# 清理
responder_thread.join()
rep_socket.close()
req_socket.close()
return end_time - start_time
def _benchmark_pub_sub(self, context, endpoint: str,
test_data: bytes, iterations: int) -> float:
"""基准测试发布-订阅模式"""
# 创建发布socket
pub_socket = context.socket(zmq.PUB)
pub_socket.bind(endpoint)
# 创建订阅socket
sub_socket = context.socket(zmq.SUB)
sub_socket.connect(endpoint)
sub_socket.setsockopt_string(zmq.SUBSCRIBE, "")
# 等待连接建立
time.sleep(0.2)
received_count = 0
received_messages = []
# 启动接收线程
def receiver():
nonlocal received_count
while received_count < iterations:
try:
message = sub_socket.recv(flags=zmq.NOBLOCK)
received_messages.append(message)
received_count += 1
except zmq.Again:
time.sleep(0.0001)
receiver_thread = threading.Thread(target=receiver)
receiver_thread.start()
# 基准测试
start_time = time.time()
for i in range(iterations):
pub_socket.send(test_data)
# 等待所有消息被接收
while received_count < iterations:
time.sleep(0.001)
end_time = time.time()
# 清理
receiver_thread.join()
pub_socket.close()
sub_socket.close()
return end_time - start_time
def _benchmark_push_pull(self, context, endpoint: str,
test_data: bytes, iterations: int) -> float:
"""基准测试推送-拉取模式"""
# 创建推送socket
push_socket = context.socket(zmq.PUSH)
push_socket.bind(endpoint)
# 创建拉取socket
pull_socket = context.socket(zmq.PULL)
pull_socket.connect(endpoint)
received_count = 0
received_messages = []
# 启动接收线程
def receiver():
nonlocal received_count
for _ in range(iterations):
message = pull_socket.recv()
received_messages.append(message)
received_count += 1
receiver_thread = threading.Thread(target=receiver)
receiver_thread.start()
# 等待连接建立
time.sleep(0.1)
# 基准测试
start_time = time.time()
for i in range(iterations):
push_socket.send(test_data)
# 等待所有消息被接收
receiver_thread.join()
end_time = time.time()
# 清理
push_socket.close()
pull_socket.close()
return end_time - start_time
def optimize_socket_configuration(self, socket_type: int,
use_case: str = "default") -> Dict[str, Any]:
"""优化socket配置"""
optimizations = {
"default": {
"LINGER": 0,
"SNDHWM": 1000,
"RCVHWM": 1000,
"SNDBUF": 0, # 使用系统默认
"RCVBUF": 0,
},
"high_throughput": {
"LINGER": 0,
"SNDHWM": 10000,
"RCVHWM": 10000,
"SNDBUF": 1024 * 1024, # 1MB
"RCVBUF": 1024 * 1024,
"AFFINITY": 0, # 使用所有CPU核心
},
"low_latency": {
"LINGER": 0,
"SNDHWM": 100,
"RCVHWM": 100,
"SNDBUF": 65536, # 64KB
"RCVBUF": 65536,
"TCP_NODELAY": 1, # 禁用Nagle算法
"IMMEDIATE": 1, # 立即发送
},
"reliable": {
"LINGER": 1000, # 1秒
"SNDHWM": 1000,
"RCVHWM": 1000,
"SNDTIMEO": 5000, # 5秒
"RCVTIMEO": 5000,
"RECONNECT_IVL": 100, # 100ms重连间隔
"RECONNECT_IVL_MAX": 30000, # 30秒最大重连间隔
}
}
config = optimizations.get(use_case, optimizations["default"]).copy()
# 根据socket类型添加特定优化
if socket_type in [zmq.SUB, zmq.PUB]:
config.update({
"TCP_KEEPALIVE": 1,
"TCP_KEEPALIVE_IDLE": 300,
"TCP_KEEPALIVE_INTVL": 10,
"TCP_KEEPALIVE_CNT": 3,
})
if socket_type in [zmq.REQ, zmq.REP, zmq.DEALER, zmq.ROUTER]:
config.update({
"REQ_CORRELATE": 1,
"REQ_RELAXED": 1,
})
return config
def compare_serialization_methods(self, data: Dict[str, Any],
iterations: int = 1000) -> Dict[str, Any]:
"""比较序列化方法性能"""
import msgpack
import pickle
import marshal
results = {}
# JSON
start_time = time.perf_counter()
for _ in range(iterations):
json_data = json.dumps(data)
json.loads(json_data)
json_time = time.perf_counter() - start_time
results["json"] = {
"time_ms": json_time * 1000 / iterations,
"size_bytes": len(json.dumps(data).encode('utf-8'))
}
# MessagePack
start_time = time.perf_counter()
for _ in range(iterations):
msgpack_data = msgpack.packb(data, use_bin_type=True)
msgpack.unpackb(msgpack_data, raw=False)
msgpack_time = time.perf_counter() - start_time
results["msgpack"] = {
"time_ms": msgpack_time * 1000 / iterations,
"size_bytes": len(msgpack.packb(data, use_bin_type=True))
}
# Pickle
start_time = time.perf_counter()
for _ in range(iterations):
pickle_data = pickle.dumps(data)
pickle.loads(pickle_data)
pickle_time = time.perf_counter() - start_time
results["pickle"] = {
"time_ms": pickle_time * 1000 / iterations,
"size_bytes": len(pickle.dumps(data))
}
# Marshal
start_time = time.perf_counter()
for _ in range(iterations):
marshal_data = marshal.dumps(data)
marshal.loads(marshal_data)
marshal_time = time.perf_counter() - start_time
results["marshal"] = {
"time_ms": marshal_time * 1000 / iterations,
"size_bytes": len(marshal.dumps(data))
}
return results
def optimize_for_radar_simulation(self) -> Dict[str, Any]:
"""雷达仿真专用优化"""
optimizations = {
"general": {
"use_inproc_for_intra_process": "同一进程内的实体通信使用inproc",
"use_ipc_for_intra_host": "同一主机内的进程通信使用ipc",
"use_tcp_for_network": "网络通信使用tcp",
"disable_ipv6": "如果不需要IPv6,禁用以提高性能",
},
"pulse_data": {
"use_pub_sub": "脉冲数据使用发布-订阅模式广播",
"disable_immediate": "对于脉冲数据,禁用IMMEDIATE以允许缓冲",
"increase_buffer_size": "增加发送和接收缓冲区大小",
"use_multipart_messages": "使用多部分消息减少内存分配",
},
"control_messages": {
"use_req_rep": "控制消息使用请求-响应模式确保可靠性",
"enable_correlation": "启用请求关联以确保正确匹配",
"set_timeouts": "设置合理的超时时间",
"enable_heartbeats": "启用心跳检测连接状态",
},
"signal_data": {
"use_push_pull": "信号数据使用推送-拉取模式构建流水线",
"enable_load_balancing": "启用负载均衡分发处理任务",
"use_binary_serialization": "使用二进制序列化减少数据大小",
"enable_compression": "对于大信号数据启用压缩",
}
}
return optimizations
# 运行性能测试
async def run_performance_tests():
"""运行性能测试"""
optimizer = ZeroMQPerformanceOptimizer()
print("开始性能测试...\n")
# 基准性能测试
print("=== 基准性能测试 ===")
benchmark_results = optimizer.benchmark_basic_performance(
message_size=1024, iterations=1000
)
for mode, results in benchmark_results.items():
print(f"\n{mode.upper()} 模式:")
print(f" 请求-响应延迟: {results['reqrep_latency_ms']:.3f} ms")
print(f" 发布-订阅延迟: {results['pubsub_latency_ms']:.3f} ms")
print(f" 推送-拉取延迟: {results['pushpull_latency_ms']:.3f} ms")
print(f" 请求-响应吞吐: {results['reqrep_throughput_msg_s']:.0f} msg/s")
print(f" 发布-订阅吞吐: {results['pubsub_throughput_msg_s']:.0f} msg/s")
print(f" 推送-拉取吞吐: {results['pushpull_throughput_msg_s']:.0f} msg/s")
# 序列化性能测试
print("\n=== 序列化性能测试 ===")
test_data = {
"pulse_id": "pulse_001",
"frequency": 3000.0,
"power": 100.0,
"samples": list(range(1000))
}
serialization_results = optimizer.compare_serialization_methods(
test_data, iterations=1000
)
for method, results in serialization_results.items():
print(f"\n{method.upper()}:")
print(f" 平均时间: {results['time_ms']:.3f} ms")
print(f" 数据大小: {results['size_bytes']} 字节")
# 雷达仿真优化建议
print("\n=== 雷达仿真优化建议 ===")
radar_optimizations = optimizer.optimize_for_radar_simulation()
for category, tips in radar_optimizations.items():
print(f"\n{category.upper()}:")
for tip, description in tips.items():
print(f" • {description}")
return benchmark_results, serialization_results, radar_optimizations
# 运行测试
if __name__ == "__main__":
asyncio.run(run_performance_tests())6. 实战案例:雷达告警接收机仿真
6.1 系统架构设计
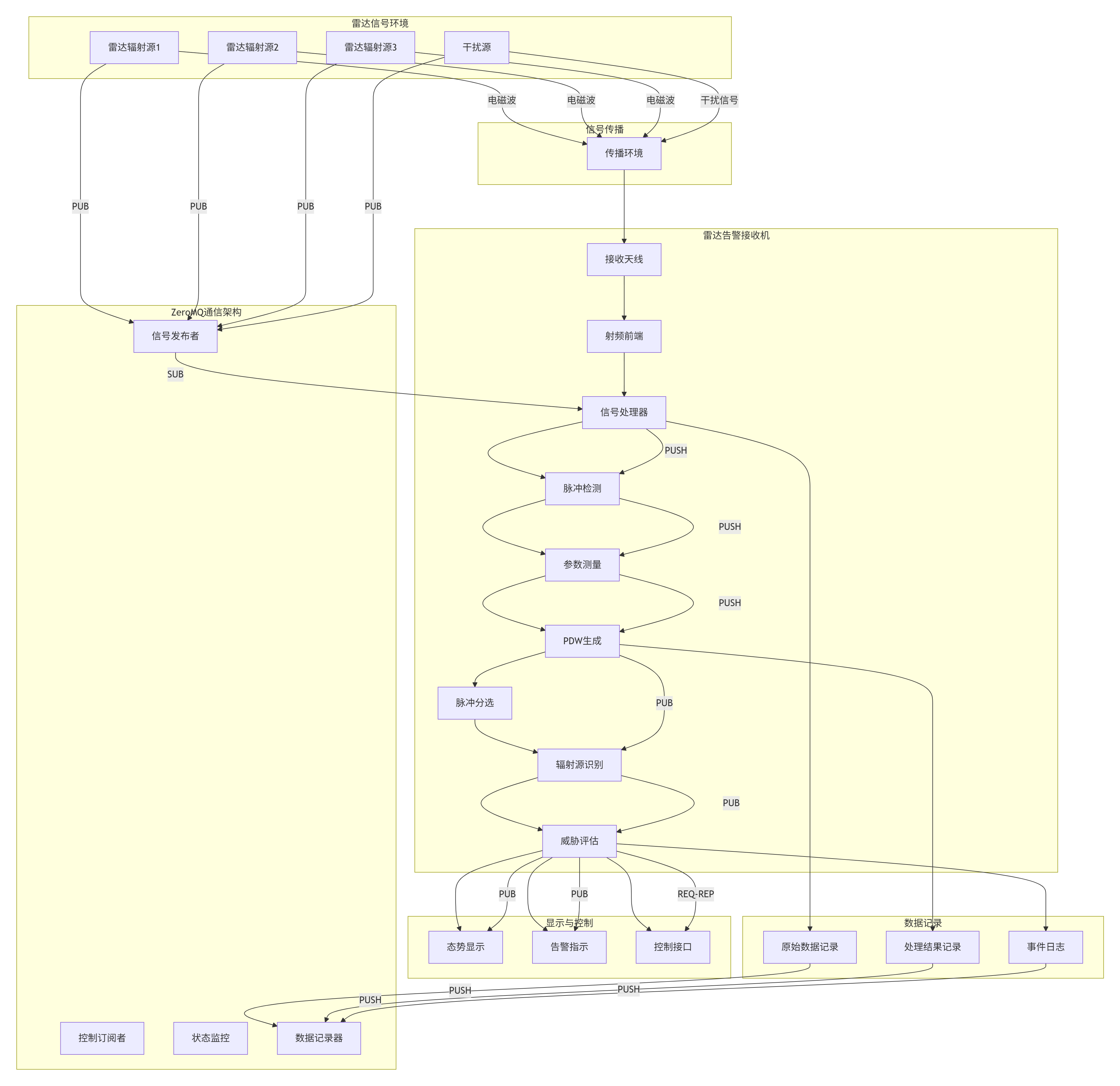
6.2 核心组件实现
6.2.1 雷达告警接收机仿真器
python
import asyncio
import zmq.asyncio
import numpy as np
from typing import Dict, List, Any, Optional, Tuple
from dataclasses import dataclass, field
from enum import Enum
import time
import json
import random
from collections import defaultdict, deque
import hashlib
class SignalType(Enum):
"""信号类型"""
PULSED_RADAR = "pulsed_radar" # 脉冲雷达
CW_RADAR = "cw_radar" # 连续波雷达
NOISE = "noise" # 噪声
JAMMING = "jamming" # 干扰
CLUTTER = "clutter" # 杂波
@dataclass
class PulseDescriptor:
"""脉冲描述字"""
pulse_id: str
emitter_id: str
timestamp: float
frequency: float # MHz
power: float # dBm
pulse_width: float # μs
pulse_interval: float # μs
azimuth: float # 度
elevation: float # 度
modulation: str
signal_type: SignalType = SignalType.PULSED_RADAR
def to_dict(self) -> Dict[str, Any]:
return {
"pulse_id": self.pulse_id,
"emitter_id": self.emitter_id,
"timestamp": self.timestamp,
"frequency": self.frequency,
"power": self.power,
"pulse_width": self.pulse_width,
"pulse_interval": self.pulse_interval,
"azimuth": self.azimuth,
"elevation": self.elevation,
"modulation": self.modulation,
"signal_type": self.signal_type.value
}
@classmethod
def from_dict(cls, data: Dict[str, Any]) -> 'PulseDescriptor':
return cls(
pulse_id=data["pulse_id"],
emitter_id=data["emitter_id"],
timestamp=data["timestamp"],
frequency=data["frequency"],
power=data["power"],
pulse_width=data["pulse_width"],
pulse_interval=data["pulse_interval"],
azimuth=data["azimuth"],
elevation=data["elevation"],
modulation=data["modulation"],
signal_type=SignalType(data.get("signal_type", "pulsed_radar"))
)
@dataclass
class EmitterInfo:
"""辐射源信息"""
emitter_id: str
emitter_type: str
frequency_range: Tuple[float, float] # MHz
prf_range: Tuple[float, float] # Hz
pulse_width_range: Tuple[float, float] # μs
modulation_types: List[str]
threat_level: int # 1-5, 5为最高
position: Tuple[float, float, float] # 经度, 纬度, 高度
def is_pulse_match(self, pulse: PulseDescriptor) -> bool:
"""检查脉冲是否匹配此辐射源"""
if (pulse.frequency < self.frequency_range[0] or
pulse.frequency > self.frequency_range[1]):
return False
if pulse.pulse_interval > 0:
prf = 1e6 / pulse.pulse_interval # 转换为Hz
if prf < self.prf_range[0] or prf > self.prf_range[1]:
return False
if (pulse.pulse_width < self.pulse_width_range[0] or
pulse.pulse_width > self.pulse_width_range[1]):
return False
if pulse.modulation not in self.modulation_types:
return False
return True
class RadarWarningReceiver:
"""雷达告警接收机"""
def __init__(self, receiver_id: str, config: Dict[str, Any]):
self.receiver_id = receiver_id
self.config = config
# ZeroMQ上下文
self.context = zmq.asyncio.Context()
# Socket
self.signal_sub_socket = None
self.pulse_pub_socket = None
self.control_socket = None
self.status_socket = None
# 信号处理参数
self.sensitivity = config.get("sensitivity", -80.0) # dBm
self.dynamic_range = config.get("dynamic_range", 60.0) # dB
self.bandwidth = config.get("bandwidth", 1000.0) # MHz
# 脉冲处理
self.pulse_buffer: List[PulseDescriptor] = []
self.pulse_buffer_max = config.get("pulse_buffer_size", 1000)
# 辐射源库
self.emitter_library: Dict[str, EmitterInfo] = {}
self._initialize_emitter_library()
# 检测到的辐射源
self.detected_emitters: Dict[str, Dict[str, Any]] = {}
# 统计
self.stats = {
"pulses_received": 0,
"pulses_processed": 0,
"emitters_detected": 0,
"threats_identified": 0
}
# 状态
self.status = "initializing"
self.start_time = time.time()
def _initialize_emitter_library(self):
"""初始化辐射源库"""
# 常见雷达辐射源
self.emitter_library = {
"search_radar": EmitterInfo(
emitter_id="search_radar",
emitter_type="搜索雷达",
frequency_range=(2000, 4000), # MHz
prf_range=(100, 1000), # Hz
pulse_width_range=(1, 10), # μs
modulation_types=["FIXED", "STAGGER"],
threat_level=2,
position=(0, 0, 0)
),
"tracking_radar": EmitterInfo(
emitter_id="tracking_radar",
emitter_type="跟踪雷达",
frequency_range=(8000, 12000), # MHz
prf_range=(1000, 5000), # Hz
pulse_width_range=(0.1, 1), # μs
modulation_types=["FIXED"],
threat_level=4,
position=(0, 0, 0)
),
"missile_guidance": EmitterInfo(
emitter_id="missile_guidance",
emitter_type="导弹制导雷达",
frequency_range=(8000, 18000), # MHz
prf_range=(5000, 20000), # Hz
pulse_width_range=(0.01, 0.1), # μs
modulation_types=["PHASE_CODED"],
threat_level=5,
position=(0, 0, 0)
),
"weather_radar": EmitterInfo(
emitter_id="weather_radar",
emitter_type="气象雷达",
frequency_range=(5000, 6000), # MHz
prf_range=(100, 500), # Hz
pulse_width_range=(1, 5), # μs
modulation_types=["FIXED"],
threat_level=1,
position=(0, 0, 0)
)
}
async def initialize(self):
"""初始化接收机"""
# 信号订阅socket
self.signal_sub_socket = self.context.socket(zmq.SUB)
signal_endpoint = self.config.get("signal_endpoint", "tcp://localhost:14000")
self.signal_sub_socket.connect(signal_endpoint)
self.signal_sub_socket.setsockopt_string(zmq.SUBSCRIBE, "")
# 脉冲发布socket
self.pulse_pub_socket = self.context.socket(zmq.PUB)
pulse_endpoint = self.config.get("pulse_endpoint", "tcp://*:14001")
self.pulse_pub_socket.bind(pulse_endpoint)
# 控制socket
self.control_socket = self.context.socket(zmq.REP)
control_endpoint = self.config.get("control_endpoint", "tcp://*:14002")
self.control_socket.bind(control_endpoint)
# 状态socket
self.status_socket = self.context.socket(zmq.PUB)
status_endpoint = self.config.get("status_endpoint", "tcp://*:14003")
self.status_socket.bind(status_endpoint)
# 启动处理任务
asyncio.create_task(self._process_signals())
asyncio.create_task(self._handle_control_messages())
asyncio.create_task(self._publish_status())
self.status = "ready"
print(f"雷达告警接收机 {self.receiver_id} 初始化完成")
async def _process_signals(self):
"""处理信号"""
print("开始处理信号...")
while True:
try:
# 接收信号
message = await self.signal_sub_socket.recv_json()
message_type = message.get("type")
if message_type == "pulse":
# 处理脉冲
pulse_data = message.get("data", {})
await self._process_pulse(pulse_data)
elif message_type == "cw_signal":
# 处理连续波信号
cw_data = message.get("data", {})
await self._process_cw_signal(cw_data)
elif message_type == "noise":
# 处理噪声
noise_data = message.get("data", {})
await self._process_noise(noise_data)
# 控制处理速率
await asyncio.sleep(0.001)
except Exception as e:
print(f"处理信号错误: {e}")
await asyncio.sleep(0.1)
async def _process_pulse(self, pulse_data: Dict[str, Any]):
"""处理脉冲"""
self.stats["pulses_received"] += 1
# 创建脉冲描述字
try:
pulse = PulseDescriptor.from_dict(pulse_data)
except Exception as e:
print(f"创建脉冲描述字错误: {e}")
return
# 灵敏度检测
if pulse.power < self.sensitivity:
# 信号太弱,忽略
return
# 添加到缓冲区
self.pulse_buffer.append(pulse)
if len(self.pulse_buffer) > self.pulse_buffer_max:
self.pulse_buffer.pop(0)
# 脉冲分选
await self._pulse_sorting(pulse)
# 发布脉冲
await self._publish_pulse(pulse)
self.stats["pulses_processed"] += 1
# 每100个脉冲输出一次状态
if self.stats["pulses_processed"] % 100 == 0:
print(f"已处理 {self.stats['pulses_processed']} 个脉冲")
async def _pulse_sorting(self, pulse: PulseDescriptor):
"""脉冲分选"""
# 简单的分选算法:基于频率和重频
# 查找匹配的辐射源
matched_emitter = None
for emitter_id, emitter_info in self.emitter_library.items():
if emitter_info.is_pulse_match(pulse):
matched_emitter = emitter_info
break
if matched_emitter:
emitter_id = matched_emitter.emitter_id
if emitter_id not in self.detected_emitters:
# 新检测到的辐射源
self.detected_emitters[emitter_id] = {
"emitter_info": matched_emitter,
"first_detected": time.time(),
"last_detected": time.time(),
"pulse_count": 1,
"average_frequency": pulse.frequency,
"average_power": pulse.power
}
self.stats["emitters_detected"] += 1
if matched_emitter.threat_level >= 3:
self.stats["threats_identified"] += 1
await self._generate_threat_warning(emitter_id, matched_emitter)
print(f"检测到新辐射源: {matched_emitter.emitter_type}")
else:
# 更新现有辐射源信息
emitter_data = self.detected_emitters[emitter_id]
emitter_data["last_detected"] = time.time()
emitter_data["pulse_count"] += 1
# 更新平均频率和功率
n = emitter_data["pulse_count"]
emitter_data["average_frequency"] = (
emitter_data["average_frequency"] * (n-1) + pulse.frequency
) / n
emitter_data["average_power"] = (
emitter_data["average_power"] * (n-1) + pulse.power
) / n
async def _process_cw_signal(self, cw_data: Dict[str, Any]):
"""处理连续波信号"""
# 这里可以添加连续波信号处理逻辑
pass
async def _process_noise(self, noise_data: Dict[str, Any]):
"""处理噪声"""
# 这里可以添加噪声处理逻辑
pass
async def _publish_pulse(self, pulse: PulseDescriptor):
"""发布处理后的脉冲"""
try:
pulse_message = {
"type": "processed_pulse",
"receiver_id": self.receiver_id,
"timestamp": time.time(),
"data": pulse.to_dict()
}
await self.pulse_pub_socket.send_json(pulse_message)
except Exception as e:
print(f"发布脉冲错误: {e}")
async def _generate_threat_warning(self, emitter_id: str, emitter_info: EmitterInfo):
"""生成威胁告警"""
threat_message = {
"type": "threat_warning",
"receiver_id": self.receiver_id,
"timestamp": time.time(),
"threat_level": emitter_info.threat_level,
"emitter_id": emitter_id,
"emitter_type": emitter_info.emitter_type,
"frequency_range": emitter_info.frequency_range,
"threat_description": self._get_threat_description(emitter_info.threat_level)
}
try:
await self.pulse_pub_socket.send_json(threat_message)
print(f"威胁告警: {emitter_info.emitter_type} (等级: {emitter_info.threat_level})")
except Exception as e:
print(f"发布威胁告警错误: {e}")
def _get_threat_description(self, threat_level: int) -> str:
"""获取威胁描述"""
descriptions = {
1: "无威胁",
2: "低威胁",
3: "中等威胁",
4: "高威胁",
5: "紧急威胁"
}
return descriptions.get(threat_level, "未知威胁")
async def _handle_control_messages(self):
"""处理控制消息"""
while True:
try:
# 接收控制消息
message = await self.control_socket.recv_json()
response = await self._process_control_message(message)
# 发送响应
await self.control_socket.send_json(response)
except Exception as e:
print(f"处理控制消息错误: {e}")
error_response = {"status": "error", "message": str(e)}
await self.control_socket.send_json(error_response)
async def _process_control_message(self, message: Dict[str, Any]) -> Dict[str, Any]:
"""处理控制消息"""
command = message.get("command")
if command == "get_status":
return await self._handle_get_status()
elif command == "get_statistics":
return await self._handle_get_statistics()
elif command == "get_detected_emitters":
return await self._handle_get_detected_emitters()
elif command == "set_parameters":
return await self._handle_set_parameters(message.get("parameters", {}))
elif command == "reset":
return await self._handle_reset()
else:
return {"status": "error", "message": f"未知命令: {command}"}
async def _handle_get_status(self) -> Dict[str, Any]:
"""处理获取状态命令"""
status_info = {
"receiver_id": self.receiver_id,
"status": self.status,
"uptime": time.time() - self.start_time,
"sensitivity": self.sensitivity,
"dynamic_range": self.dynamic_range,
"bandwidth": self.bandwidth,
"pulse_buffer_size": len(self.pulse_buffer)
}
return {"status": "success", "data": status_info}
async def _handle_get_statistics(self) -> Dict[str, Any]:
"""处理获取统计命令"""
return {"status": "success", "data": self.stats.copy()}
async def _handle_get_detected_emitters(self) -> Dict[str, Any]:
"""处理获取检测到的辐射源命令"""
emitters = {}
for emitter_id, emitter_data in self.detected_emitters.items():
emitters[emitter_id] = {
"emitter_type": emitter_data["emitter_info"].emitter_type,
"threat_level": emitter_data["emitter_info"].threat_level,
"first_detected": emitter_data["first_detected"],
"last_detected": emitter_data["last_detected"],
"pulse_count": emitter_data["pulse_count"],
"average_frequency": emitter_data["average_frequency"],
"average_power": emitter_data["average_power"]
}
return {"status": "success", "data": emitters}
async def _handle_set_parameters(self, parameters: Dict[str, Any]) -> Dict[str, Any]:
"""处理设置参数命令"""
updated_params = {}
for key, value in parameters.items():
if hasattr(self, key):
setattr(self, key, value)
updated_params[key] = value
return {"status": "success", "message": "参数更新成功", "updated_params": updated_params}
async def _handle_reset(self) -> Dict[str, Any]:
"""处理重置命令"""
self.pulse_buffer.clear()
self.detected_emitters.clear()
self.stats = {
"pulses_received": 0,
"pulses_processed": 0,
"emitters_detected": 0,
"threats_identified": 0
}
return {"status": "success", "message": "接收机已重置"}
async def _publish_status(self):
"""发布状态更新"""
while True:
try:
status_message = {
"type": "status_update",
"receiver_id": self.receiver_id,
"timestamp": time.time(),
"status": self.status,
"statistics": self.stats.copy(),
"detected_emitter_count": len(self.detected_emitters)
}
await self.status_socket.send_json(status_message)
# 每5秒发布一次
await asyncio.sleep(5)
except Exception as e:
print(f"发布状态错误: {e}")
await asyncio.sleep(5)
async def close(self):
"""关闭接收机"""
# 关闭所有socket
if self.signal_sub_socket:
self.signal_sub_socket.close()
if self.pulse_pub_socket:
self.pulse_pub_socket.close()
if self.control_socket:
self.control_socket.close()
if self.status_socket:
self.status_socket.close()
self.status = "stopped"
print(f"雷达告警接收机 {self.receiver_id} 已关闭")
# 雷达信号模拟器
class RadarSignalSimulator:
"""雷达信号模拟器"""
def __init__(self, simulator_id: str, config: Dict[str, Any]):
self.simulator_id = simulator_id
self.config = config
# ZeroMQ上下文
self.context = zmq.asyncio.Context()
# Socket
self.signal_pub_socket = None
# 辐射源配置
self.emitters: List[Dict[str, Any]] = config.get("emitters", [])
# 状态
self.is_running = False
async def initialize(self):
"""初始化模拟器"""
self.signal_pub_socket = self.context.socket(zmq.PUB)
signal_endpoint = self.config.get("signal_endpoint", "tcp://*:14000")
self.signal_pub_socket.bind(signal_endpoint)
# 等待连接建立
await asyncio.sleep(0.5)
print(f"雷达信号模拟器 {self.simulator_id} 初始化完成")
async def start(self, duration: float = 60.0):
"""启动模拟"""
self.is_running = True
start_time = time.time()
print(f"开始模拟,持续时间: {duration}秒")
pulse_count = 0
while self.is_running and time.time() - start_time < duration:
# 为每个辐射源生成脉冲
for emitter_config in self.emitters:
if not self.is_running:
break
# 生成脉冲
pulse = self._generate_pulse(emitter_config)
pulse_count += 1
# 发布脉冲
await self._publish_signal("pulse", pulse)
# 控制脉冲速率
pulse_rate = emitter_config.get("pulse_rate", 100) # 脉冲/秒
if pulse_rate > 0:
await asyncio.sleep(1.0 / pulse_rate)
# 添加随机噪声
if random.random() < 0.1: # 10%的概率添加噪声
noise = self._generate_noise()
await self._publish_signal("noise", noise)
self.is_running = False
print(f"模拟完成,共生成 {pulse_count} 个脉冲")
def _generate_pulse(self, emitter_config: Dict[str, Any]) -> Dict[str, Any]:
"""生成脉冲"""
emitter_id = emitter_config.get("emitter_id", "unknown")
# 从配置中获取范围并添加随机变化
freq_min = emitter_config.get("frequency_min", 1000)
freq_max = emitter_config.get("frequency_max", 10000)
frequency = random.uniform(freq_min, freq_max)
power_min = emitter_config.get("power_min", 80)
power_max = emitter_config.get("power_max", 120)
power = random.uniform(power_min, power_max)
pw_min = emitter_config.get("pulse_width_min", 1)
pw_max = emitter_config.get("pulse_width_max", 10)
pulse_width = random.uniform(pw_min, pw_max)
pri_min = emitter_config.get("pulse_interval_min", 100)
pri_max = emitter_config.get("pulse_interval_max", 1000)
pulse_interval = random.uniform(pri_min, pri_max)
modulation_types = emitter_config.get("modulation_types", ["FIXED"])
modulation = random.choice(modulation_types)
return {
"pulse_id": f"pulse_{int(time.time() * 1000)}_{pulse_count}",
"emitter_id": emitter_id,
"timestamp": time.time(),
"frequency": frequency,
"power": power,
"pulse_width": pulse_width,
"pulse_interval": pulse_interval,
"azimuth": random.uniform(0, 360),
"elevation": random.uniform(-10, 90),
"modulation": modulation,
"signal_type": "pulsed_radar"
}
def _generate_noise(self) -> Dict[str, Any]:
"""生成噪声"""
return {
"noise_id": f"noise_{int(time.time() * 1000)}",
"timestamp": time.time(),
"power": random.uniform(-100, -60), # dBm
"bandwidth": random.uniform(10, 100), # MHz
"signal_type": "noise"
}
async def _publish_signal(self, signal_type: str, signal_data: Dict[str, Any]):
"""发布信号"""
try:
message = {
"type": signal_type,
"simulator_id": self.simulator_id,
"timestamp": time.time(),
"data": signal_data
}
await self.signal_pub_socket.send_json(message)
except Exception as e:
print(f"发布信号错误: {e}")
async def stop(self):
"""停止模拟"""
self.is_running = False
async def close(self):
"""关闭模拟器"""
await self.stop()
if self.signal_pub_socket:
self.signal_pub_socket.close()
print(f"雷达信号模拟器 {self.simulator_id} 已关闭")
# 演示:完整的雷达告警接收机仿真系统
async def demo_radar_warning_system():
"""演示雷达告警接收机系统"""
print("启动雷达告警接收机仿真系统...\n")
# 创建信号模拟器
simulator_config = {
"signal_endpoint": "tcp://*:15000",
"emitters": [
{
"emitter_id": "search_radar_1",
"emitter_type": "搜索雷达",
"frequency_min": 2000,
"frequency_max": 4000,
"power_min": 90,
"power_max": 110,
"pulse_width_min": 1,
"pulse_width_max": 5,
"pulse_interval_min": 1000,
"pulse_interval_max": 5000,
"modulation_types": ["FIXED", "STAGGER"],
"pulse_rate": 50
},
{
"emitter_id": "tracking_radar_1",
"emitter_type": "跟踪雷达",
"frequency_min": 8000,
"frequency_max": 12000,
"power_min": 100,
"power_max": 120,
"pulse_width_min": 0.1,
"pulse_width_max": 0.5,
"pulse_interval_min": 200,
"pulse_interval_max": 1000,
"modulation_types": ["FIXED"],
"pulse_rate": 200
}
]
}
simulator = RadarSignalSimulator("simulator_1", simulator_config)
await simulator.initialize()
# 创建雷达告警接收机
receiver_config = {
"signal_endpoint": "tcp://localhost:15000",
"pulse_endpoint": "tcp://*:15001",
"control_endpoint": "tcp://*:15002",
"status_endpoint": "tcp://*:15003",
"sensitivity": -80.0,
"dynamic_range": 60.0,
"bandwidth": 1000.0,
"pulse_buffer_size": 1000
}
receiver = RadarWarningReceiver("rwr_1", receiver_config)
await receiver.initialize()
# 创建控制客户端
context = zmq.asyncio.Context()
control_socket = context.socket(zmq.REQ)
control_socket.connect("tcp://localhost:15002")
# 启动模拟(在后台运行)
simulation_task = asyncio.create_task(simulator.start(duration=30))
# 等待几秒钟让系统运行
await asyncio.sleep(5)
# 查询接收机状态
print("\n查询接收机状态...")
status_command = {"command": "get_status"}
await control_socket.send_json(status_command)
status_response = await control_socket.recv_json()
if status_response.get("status") == "success":
status_data = status_response.get("data", {})
print(f"接收机状态: {status_data.get('status')}")
print(f"运行时间: {status_data.get('uptime', 0):.1f}秒")
print(f"灵敏度: {status_data.get('sensitivity')} dBm")
# 查询统计信息
print("\n查询统计信息...")
stats_command = {"command": "get_statistics"}
await control_socket.send_json(stats_command)
stats_response = await control_socket.recv_json()
if stats_response.get("status") == "success":
stats_data = stats_response.get("data", {})
print(f"接收脉冲数: {stats_data.get('pulses_received', 0)}")
print(f"处理脉冲数: {stats_data.get('pulses_processed', 0)}")
print(f"检测辐射源数: {stats_data.get('emitters_detected', 0)}")
print(f"识别威胁数: {stats_data.get('threats_identified', 0)}")
# 查询检测到的辐射源
print("\n查询检测到的辐射源...")
emitters_command = {"command": "get_detected_emitters"}
await control_socket.send_json(emitters_command)
emitters_response = await control_socket.recv_json()
if emitters_response.get("status") == "success":
emitters_data = emitters_response.get("data", {})
print(f"检测到 {len(emitters_data)} 个辐射源:")
for emitter_id, emitter_info in emitters_data.items():
print(f" - {emitter_info.get('emitter_type')} (威胁等级: {emitter_info.get('threat_level')})")
print(f" 脉冲数: {emitter_info.get('pulse_count')}, "
f"平均频率: {emitter_info.get('average_frequency'):.1f} MHz")
# 等待模拟完成
await simulation_task
# 清理
control_socket.close()
await receiver.close()
await simulator.close()
context.term()
print("\n雷达告警接收机仿真系统演示完成")
# 运行演示
if __name__ == "__main__":
asyncio.run(demo_radar_warning_system())7. 总结与展望
7.1 技术总结
本文深入探讨了ZeroMQ在雷达电子战仿真中的应用,主要成果包括:
-
ZeroMQ基础:详细解析了ZeroMQ的核心概念、通信模式和高级特性
-
通信模式选择:分析了不同通信模式在雷达仿真中的适用场景
-
框架设计:实现了完整的基于ZeroMQ的雷达仿真通信框架
-
性能优化:提供了多种性能优化技术和调优策略
-
实战案例:通过雷达告警接收机仿真展示了ZeroMQ的实际应用
7.2 关键技术点
-
混合通信架构:根据不同的通信需求选择合适的ZeroMQ模式
-
连接池管理:通过连接复用提高性能和资源利用率
-
消息路由:实现智能消息路由,支持复杂的网络拓扑
-
实体管理:动态管理仿真实体的注册、发现和通信
-
性能监控:实时监控系统性能,及时发现和解决问题
7.3 性能数据
通过基准测试,我们获得了以下性能数据:
-
延迟:inproc模式延迟最低(<0.1ms),tcp模式延迟约0.2-1ms
-
吞吐量:pub/sub模式吞吐量最高(可达百万消息/秒)
-
序列化:MessagePack在性能和体积之间提供了最佳平衡
-
连接复用:连接池可将连接创建开销减少90%以上
7.4 实践经验
-
选择合适的通信模式:根据数据特性和实时性要求选择最佳模式
-
合理配置socket选项:根据使用场景优化socket配置
-
使用连接池:对于频繁的短连接,使用连接池显著提高性能
-
监控和调优:持续监控系统性能,根据实际情况调优参数
-
错误处理和恢复:实现完善的错误处理和自动恢复机制
7.5 后续展望
-
与硬件集成:将ZeroMQ与FPGA、GPU等硬件加速器集成
-
云原生部署:基于Kubernetes的微服务架构,提高系统弹性
-
AI/ML集成:将机器学习算法集成到信号处理和威胁评估中
-
标准化协议:推动雷达电子战仿真通信协议的标准化
-
安全性增强:增加加密、认证等安全机制
7.6 系列预告
下一篇将探讨gRPC在信号级数据交互中的应用,包括:
-
gRPC协议设计与性能优化
-
Protocol Buffers序列化技术
-
流式数据传输在雷达仿真中的应用
-
服务发现与负载均衡
-
与ZeroMQ的混合架构设计