欢迎订阅【HALCON 实战入门】专栏:
1. HALCON 简介与安装
2. HALCON 快速入门
3. HALCON 图像处理流程
4. 图像读取、显示与保存
5. 图像采集
6. 交互式绘图与 ROI
2. HALCON 快速入门
- [第 1 章:安装 HALCON](#第 1 章:安装 HALCON)
- [第 2 章:HALCON 架构](#第 2 章:HALCON 架构)
-
- [2.1 算子](#2.1 算子)
-
- [2.1.1 参数与数据结构](#2.1.1 参数与数据结构)
- [2.2 扩展包](#2.2 扩展包)
- [2.3 语言接口](#2.3 语言接口)
-
- [2.3.1 HALCON/Python 接口](#2.3.1 HALCON/Python 接口)
- [2.3.2 HALCON/C 接口](#2.3.2 HALCON/C 接口)
- [2.3.3 HALCON/C++ 接口](#2.3.3 HALCON/C++ 接口)
- [2.3.4 HALCON/.NET 接口](#2.3.4 HALCON/.NET 接口)
- [2.4 图像采集接口](#2.4 图像采集接口)
- [2.5 专用 I/O 接口](#2.5 专用 I/O 接口)
- [第 3 章:应用程序开发](#第 3 章:应用程序开发)
-
- [3.1 HDevelop](#3.1 HDevelop)
- [3.2 示例程序](#3.2 示例程序)
-
- [3.2.1 在 HDevelop 中创建原型](#3.2.1 在 HDevelop 中创建原型)
- [3.2.2 准备 Visual Studio 项目](#3.2.2 准备 Visual Studio 项目)
- [3.2.3 导出库项目](#3.2.3 导出库项目)
- [3.2.4 将库项目集成到 Visual Studio 中](#3.2.4 将库项目集成到 Visual Studio 中)
- [第 4 章:学习指南](#第 4 章:学习指南)
本文译自:HALCON:Quick Guide,版权属于 Copyright © 2003-2025 by MVTec Software GmbH, Munich, Germany。
有关 HALCON 的更多信息,请访问:https://www.halcon.com
关于本手册
本手册对 HALCON 进行介绍,面向无 HALCON 使用基础的初学者。
本手册包括以下主题:
- HALCON 安装:本章介绍 MVTec 软件管理器(SOM)。
- HALCON 架构:本章讲解理解 HALCON 及其工作原理所需的部分理论基础。
- 应用开发方法:本章阐述基于 HALCON 进行开发的三种基本方式,并通过首个编程实例引导您上手。
- 后续学习指引:本章列出可参考的其他信息来源。
第 1 章:安装 HALCON
HALCON 是德国 MVtec 公司开发的一款综合性的机器视觉标准软件,拥有全球通用的集成开发环境(HDevelop)。
对于 Linux 和 Windows 用户,我们建议通过 MVTec 软件管理器(SOM) 下载并安装 HALCON。SOM 是一款用于软件包的安装管理器,可访问远程产品目录,并支持软件包的下载与安装等功能。通过 SOM 安装 HALCON 的详细步骤说明,请参阅《安装指南》。
注:通过 SOM 安装 HALCON 的详细步骤说明,请参阅: 【HALCON 实战入门】1. HALCON 简介与安装。
第 2 章:HALCON 架构
HALCON 的基础架构如图 2.1 所示。其核心部分为图像处理库 ,包含超过 2000 个算子。
通过扩展包 可以开发自定义算子。
在应用程序中,可以通过各类语言接口 调用这些算子,例如 HALCON/C++ 或 HALCON/Python。这些接口库支持以对应编程语言的典型编程风格直接使用算子。
针对图像采集设备的接入,HALCON 提供图像采集接口 ,可以使用统一的方式操控各类不同的图像采集设备。包含设备专属实现逻辑的库会在需要时动态加载。类似地,I/O 设备通过专用 I/O 接口进行访问。
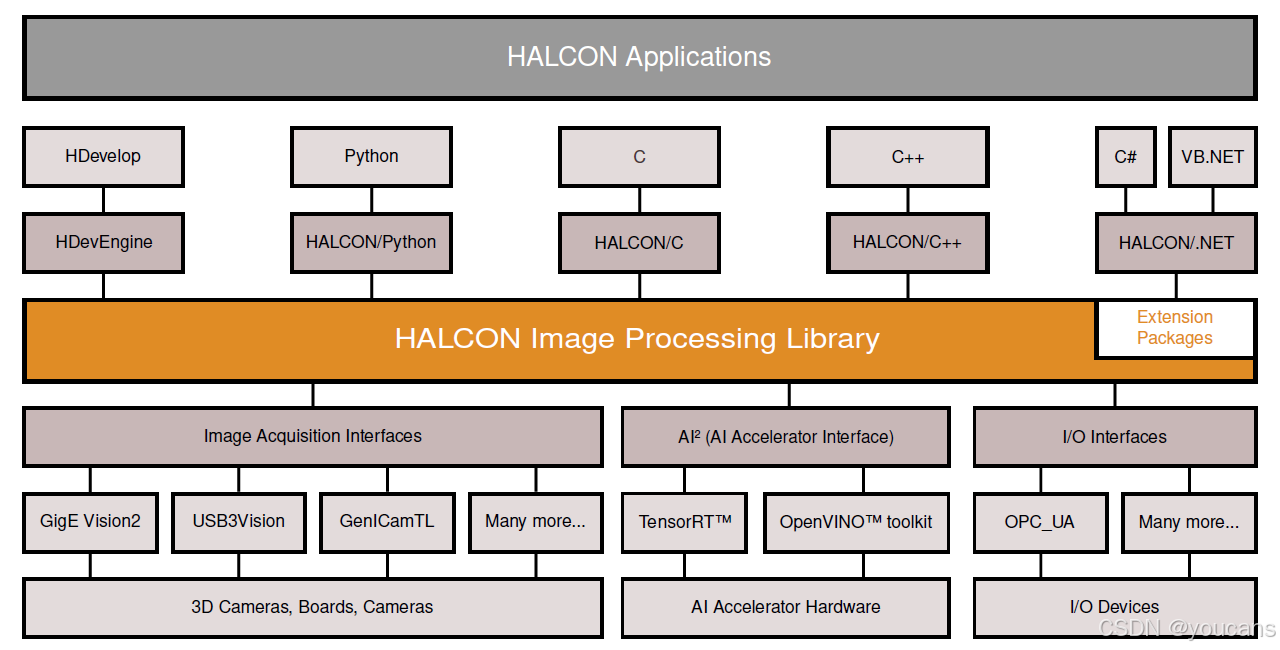
图 2.1:HALCON 基础架构。
2.1 算子
HALCON 库中的所有功能都是通过算子(Operators)完成的。
每个算子都包含多种实现方法,可以通过参数选择。
所有算子的列表可以在 HALCON 算子参考手册(HALCON Operator Reference)中查看,该手册提供了 HDevelop, .NET, Python, C++, 和 C syntax 接口语法。
算子的特性如下:
- 算子之间不存在层级关系。
- 算子自然会形成逻辑分组。
- 算子的设计遵循开放式架构规范。
- 许多算子可自动实现并行化处理,且对用户透明。
- 算子的输入、输出参数遵循标准化排序规则:输入图像参数、输出图像参数、输入控制参数、输出控制参数。
2.1.1 参数与数据结构
HALCON 包含两类基础参数类型:图像类数据 与控制类数据。
-
图像类数据 包含 图像、区域和 XLD(扩展线型描述,eXtended Line Description)。
-
图像
图像主要由多个通道构成,即由包含像素值的矩阵组成。
同一幅图像的所有通道尺寸均相同。关于像素与通道的详细说明,请参阅 HALCON 算子参考手册中的 "图像" 章节。
每幅图像均可通过 ** 感兴趣区域(ROI)** 指定需要处理的图像部分。关于 ROI 处理的详细内容,见《解决方案指南 I(Solution Guide I)》中的 "感兴趣区域(ROI)" 章节。
-
区域
区域是一组像素的集合。
区域内的像素无需相互连通,即使是任意离散的像素集合也可作为单个区域处理。使用 connection 算子可将一个区域拆分为多个连通区域,即由连通像素构成的组件。
-
XLD
XLD 包含所有基于轮廓与多边形的数据。
亚像素精度算子(如 edges_sub_pix)会以 XLD 数据形式返回轮廓。轮廓是一系列由线段连接的二维控制点,控制点之间的间距通常约为一个像素。
XLD 对象除控制点外,还包含局部属性与全局属性。典型示例包括控制点的边缘幅值、轮廓段的回归参数等。
除提取 XLD 对象外,HALCON 还支持对其进行后续处理,例如根据指定特征范围筛选轮廓、将轮廓分割为直线、圆弧、多边形或平行线等。
-
-
控制类数据 包含 句柄(handles) 以及整数、浮点数、字符串等基本数据类型。
- 句柄(handles)是对复杂数据结构的引用,例如图像采集接口的连接,或基于形状匹配的模板。
出于效率与数据安全考虑,算子之间传递的并非完整数据结构,而仅传递句柄。
句柄是具有特定意义的标识值,禁止修改,并且在不同运行环境、不同软件版本之间可能存在差异。当所有引用均被覆盖后,句柄会被自动释放。
使用句柄的典型场景包括:图形窗口、文件、套接字、图像采集接口、OCR、OCV、测量以及匹配。
- 句柄(handles)是对复杂数据结构的引用,例如图像采集接口的连接,或基于形状匹配的模板。
2.2 扩展包
HALCON 包含了丰富的算子库,也可以通过自定义新算子进行扩展。
HALCON 提供了扩展包接口,支持以扩展包的形式集成使用 C 语言开发的新算子。扩展包接口包含若干预定义例程与宏,便于在 C 语言中便捷处理图像数据与内存对象。新算子成功集成后,即可与其他 HALCON 原生算子一样正常使用。
有关扩展算子库的详细信息,请参阅《扩展包程序员手册(Extension Package Programmer's Manual)》。
2.3 语言接口
HALCON 提供了各类语言接口,原生支持 Python、C、C++ 及 .NET 语言接口,可以在应用程序中直接调用 HALCON 算子并使用其数据类型。
开始开发前,我们建议先查看可直接运行的示例程序。通过示例,您可以了解项目的搭建方式以及算子与数据类型的使用方法。
为符合对应编程语言的通用规范,不同语言接口在类型名称、类、算子命名规则等方面可能会存在差异。各支持编程语言对应的算子原型在《HALCON 算子参考手册(HALCON Operator Reference)》中提供了详细说明。
2.3.1 HALCON/Python 接口
Python 接口凭借其简洁性和快速原型开发能力脱颖而出。在导入 HALCON/Python 模块后,HALCON 算子可直接作为独立函数进行调用。
注意:HALCON/Python 中的算子参数被划分为函数参数(输入)与返回值(输出)两部分。
示例:以下代码读取一幅图像,并计算其中的连通区域数量。本例程的前提条件与详细说明,请参阅《程序员指南(Programmer's Guide)》中的:Part 4, 首个示例程序。
python
img = ha.read_image('pcb')
region = ha.threshold(img, 0, 122)
num_regions = ha.count_obj(ha.connection(region))
print(f'Number of Regions: {num_regions}')2.3.2 HALCON/C 接口
C 语言接口是 HALCON 支持的最简接口。HALCON 算子的本身就是由 C 语言实现的,C 语言是原生接口,支持最好。
每个算子对应一个或两个全局函数,算子名称与参数顺序均与 HDevelop 语言相同。
示例:以下代码读取一幅图像,并计算其中的连通区域数量。
本例程的前提条件与详细说明,请参阅《程序员指南(Programmer's Guide)》中的:Part 5, 首个示例程序。
c
Hobject img;
read_image(&img, "pcb");
Hobject region;
threshold(img, ®ion, 0, 122);
Hobject connected_regions;
connection(region, &connected_regions);
Hlong num_regions = 0;
count_obj(connected_regions, &num_regions);
printf("Number of Regions: %" PRIdPTR "\n", num_regions);2.3.3 HALCON/C++ 接口
C++ 接口比 C 接口复杂得多,应用了 C++ 面向对象编程的优点,包括自动类型转换、构造和析构函数等。另外和 C 接口一样,也为每个 HALCON 算子提供了全局函数,来实现程序化的编程风格(a procedural style of programming)。
读取图像并计算连接区域(connected regions)数量的 C++ 接口实现代码如下。
C++ 接口比 C 语言接口复杂,也更加完善。它充分应用了 C++ 面向对象编程的优点,例如自动类型转换、对象构造与析构,以及将函数与其数据封装为类。C++ 也为每个 HALCON 算子提供了全局函数,以支持与 C 接口类似的过程式编程风格。
示例:以下代码读取一幅图像,并计算其中的连通区域数量。
本例程的前提条件与详细说明,请参阅《程序员指南(Programmer's Guide)》中的:Part 2, 首个示例程序。
cpp
HImage img{"pcb"};
HRegion region = img.Threshold(0, 122);
Hlong numRegions = region.Connection().CountObj();
std::cout << "Number of Regions: " << numRegions << '\n';2.3.4 HALCON/.NET 接口
C# 与 Visual Basic.NET 通过 .NET 接口使用 HALCON。
与 C++ 类似,它提供两种编程风格:过程式编程与面向对象编程。
- 在过程式编程风格中,类 HOperatorSet 提供了全部 HALCON 算子,其中使用 HObject 管理图像类数据,使用 HTuple 管理控制类数据。
- 在面向对象编程风格中,系统提供了如 HDataCode2d、HMeasure、HShapeModel 等类以实现核心功能,还提供了用于图像类数据的类,例如 HImage 和 HRegion。
示例:
以下代码读取一幅图像,并计算其中的连通区域数量。
本例程的前提条件与详细说明,请参阅《程序员指南(Programmer's Guide)》中的:Part 3, 首个示例程序。
vbnet
HImage img = new HImage("pcb");
HRegion region = img.Threshold(0d, 122d);
int numRegions = region.Connection().CountObj();
Console.WriteLine("Number of Regions: " + numRegions);2.4 图像采集接口
图像采集接口是图像采集设备厂商提供的软件与 HALCON 之间的桥梁。这些接口构成了一套通用、统一的接口,仅需少量算子即可完成操作。详细信息,请参阅《解决方案指南 II-A(Solution Guide II-A)》。
HALCON 通过动态库(Windows: 动态加载库 DLLs, Linux: 共享库 shared libraries)的形式为 50 多个图像采集卡和数百种工业相机提供图像采集接口。库文件名以 hAcq 为前缀开头,HALCON XL 使用的库文件以 xl 为后缀结尾。
基于行业标准、应用最广泛的接口已随 HALCON 库一同安装。其它接口以及已包含接口的最新版本可从网址 https://www.mvtec.com/products/interfaces 下载。MVTec 会持续开发新接口;当设备厂商软件变更时,对应的 HALCON 接口也会随之适配。如需查看所支持图像采集接口的完整列表,也可参阅《图像采集接口参考手册(Image Acquisition Interface Reference)》。
图像采集设备安装成功后,在 HALCON 中可以通过调用算子 open_framegrabber 访问设备,只要指定图像采集接口名称及连接参数即可。然后,通过调用算子 grab_image(或 grab_image_async)即可采集图像。
2.5 专用 I/O 接口
HALCON 为多种 I/O 设备提供接口以实现数据采集。这些接口使用动态库(Windows: 动态加载库 DLLs, Linux: 共享库 shared libraries)。库文件名以 hio 为前缀开头,HALCON XL 使用的库文件以 xl 为后缀结尾。
HALCON 对不同 I/O 设备使用同一类算子实现统一访问。安装好 I/O 设备后,调用算子 open_io_device 建立连接,指定 I/O 设备接口名称及可选的设备专属参数。连接建立后,通过调用 open_io_channel 打开传输通道,然后使用算子 read_io_channel 和 write_io_channel 进行数值读写。
请注意,HALCON I/O 设备接口的最新信息及可下载的接口(含文档)可在网址 https://www.mvtec.com/products/interfaces 获取。如需查看所支持 I/O 设备接口的完整列表,可参阅《I/O 设备接口参考手册(I/O Device Interface Reference)》。
第 3 章:应用程序开发
HDevelop 是面向 HALCON 机器视觉库的交互式开发环境。推荐用户先在 HDevelop 中进行快速原型开发。可以通过 HDevelop 找到最优的算子与参数,以完成图像分析任务。
在完成 HDevelop 程序开发后,需要将其移植到最终运行环境中。有三种方式可以选择:
-
从头编写程序:
从头编写程序意味着将 HDevelop 代码手动转换为目标编程语言(C++、Python 等)。
注意不同编程语言在算子命名规范、类名等方面可能存在差异,详见《HALCON 算子参考手册》、《程序员指南》。
-
导出 HDevelop 代码:
使用 HDevelop 的代码导出功能,可以自动将 HDevelop 代码转换为目标编程语言代码。
-
导出库项目
HDevelop 的库导出功能会生成一个可直接使用的项目文件夹,其中包含目标语言的封装代码以及用于构建项目的 CMake 文件。
该功能基于 HDevEngine 解释器实现,可以在 C++ 或任何可集成 .NET 对象的编程语言编写的应用程序中直接执行 HDevelop 程序。因此,当修改 HDevelop 代码时,无需重新编译整个应用程序。
也可以直接使用 HDevEngine,详见《程序员指南》Part6:HDevEngine 的使用方法。
3.1 HDevelop
我们先来初步了解一下 HDevelop。图 3.1 展示的是加载并部分执行一段程序后的 HDevelop 用户界面。
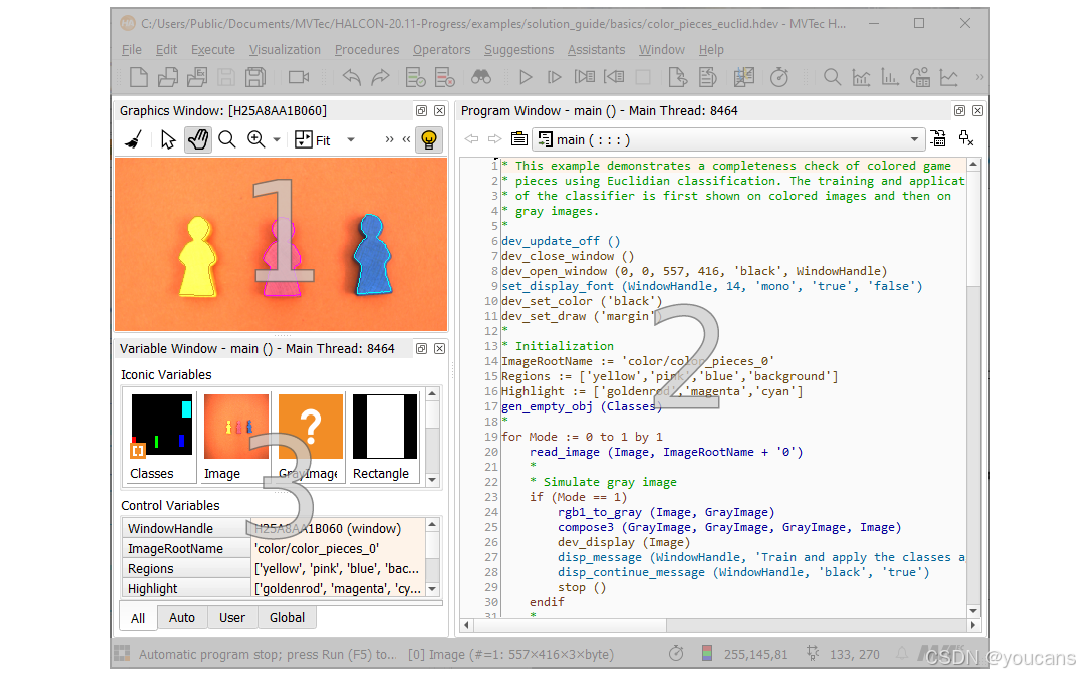
图 3.1:HDevelop 用户界面
默认情况下,以下窗口为可见状态,它们也是使用 HDevelop 进行开发的核心窗口:
- 图形窗口(GraphicsWindow):显示(中间)结果,即图像类数据,如图像、区域和 XLD 轮廓。
- 程序窗口(ProgramWindow):在此窗口中编写程序代码,通过算子调用 HALCON 的图像处理功能。
- 变量窗口(VariableWindow):显示所有变量,包括图像类变量与控制类变量。
有关 HDevelop 的详细说明,请参阅《HDevelop 用户指南(HDevelop User's Guide)》。下面的视频教程也可以作为学习 HDevelop 的入门教程:
- HDevelop 教程 01:界面与导航(GUI and Navigation)
- HDevelop 教程 02:变量(Variables)
- HDevelop 教程 03:可视化(Visualization)
3.2 示例程序
在学习 HALCON 基本概念和 HDevelop 用户界面之后,我们将使用库导出方式开发一个 C++ 应用程序。
接下来本节将介绍详细的操作步骤,您也可以观看相关教程视频:
- 通过库项目导出将 HDevelop 代码集成到 C++ 应用程序(Integrate HDevelop code into a C++ application using the Library Project Export);
- 通过库项目导出将 HDevelop 代码集成到 C# 应用程序(Integrate HDevelop code into a C# application using the Library Project Export)。
这些视频演示了库导出的完整流程。
3.2.1 在 HDevelop 中创建原型
本示例的任务是读取一幅图像并计算其中的连通区域数量。
- 打开 HDevelop,并将以下代码输入到程序窗口中:
c
read_image (Image, 'pcb')
threshold (Image, Region, 0, 122)
connection (Region, ConnectedRegions)
count_obj (ConnectedRegions, Number)- 通过点击工具栏中的运行或按
F5键来测试您的程序。
为便于将此 HDevelop 代码集成到实际应用程序中,我们将机器视觉部分封装到一个本地过程中。
- 高亮选中以下代码行:
c
threshold (Image, Region, 0, 122)
connection (Region, ConnectedRegions)
count_obj (ConnectedRegions, Number)-
单击鼠标右键,打开上下文菜单。
-
选择 "创建新过程(Create New Procedure)"。
-
将其命名为
count_regions。 -
选择 "参数",并将选择方案更改为:"先入后出(First In Last Out)"。
-
点击 "确定" 确认。
-
将 HDevelop 程序保存为
hdev_count_regions.hdev。
3.2.2 准备 Visual Studio 项目
本示例将使用 Visual Studio 2019。
-
创建一个空的 C++ Windows 控制台项目,命名为
vs_count_regions。请勾选 "将解决方案和项目放在同一目录中" 选项。 -
添加 C++ 源文件(菜单:项目 → 添加新项 → C++ 文件),并命名为
vs_count_regions.cpp。 -
在工具栏的下拉菜单中选择解决方案平台 x64。
-
打开项目属性(菜单:项目 → vs_count_regions 属性),并进行以下设置:
- 选择 C/C++ → 常规,添加以下附加包含目录:(HALCONROOT)\include\halconcpp;
- 选择 链接器 → 常规,添加以下附加库目录:KaTeX parse error: Undefined control sequence: \lib at position 13: (HALCONROOT)\̲l̲i̲b̲(HALCONARCH);
- 选择 链接器 → 输入,添加以下附加依赖项:halconcpp.lib;hdevenginecpp.lib;
3.2.3 导出库项目
接下来,将 HDevelop 程序 hdev_count_regions.hdev 导出到 Visual Studio 项目文件夹中。
-
打开此前创建的 HDevelop 程序
hdev_count_regions.hdev。 -
打开 文件 → 导出库项目。
-
进行以下设置:
- 输入文件:当前程序;
- 目标语言:C++;
- 项目名称:hdev_count_regions;
- 项目位置:选择 Visual Studio 项目 vs_count_regions 所在路径。
- 命名空间:hdev_count_regions
-
单击 "导出" 确认。
现在,Visual Studio 项目文件夹 vs_count_regions 中至少应包含以下文件:
- vs_count_regions.cpp(源文件)
- vs_count_regions.sln(解决方案)
- hdev_count_regions(HDevelop 导出的文件夹)
- cmake
- res_hdev_count_regions
- hdev_count_regions.hdev
- source
- hdev_count_regions.cpp
- hdev_count_regions.h
- CMakeLists.txt
3.2.4 将库项目集成到 Visual Studio 中
最后,需要将 HDevelop 程序集成到 Visual Studio 项目中。
-
打开 Visual Studio 项目。
-
打开 "项目 → 添加现有项",选择由 HDevelop 库导出功能创建的 C++ 文件
hdev_count_regions.cpp和头文件hdev_count_regions.h。(文件位于 hdev_count_regions\source 文件夹中) -
将以下代码输入到
vs_count_regions.cpp中。
cpp
#include <iostream>
#include "HalconCpp.h"
#include "hdev_count_regions/source/hdev_count_regions.h"
int main()
{
HalconCpp::HImage Image("pcb");
hdev_count_regions::SetResourcePath("hdev_count_regions/res_hdev_count_regions");
HalconCpp::HTuple Number{};
hdev_count_regions::count_regions(Image, &Number);
std::cout << "Number of Regions: " << Number.L() << '\n';
}- 执行程序。
控制台打开,并显示结果 "Number of regions: 43"。
第 4 章:学习指南
如果要更深入地学习 HALCON,我们提供了更多文档与支持资源。
-
MVTec 学院
MVTec 学院提供大量交互式在线课程,涵盖从基础概念到高级专项应用的众多主题。
请访问 https://academy.mvtec.com 了解更多信息。
-
HDevelop 示例程序
HALCON 提供丰富的示例程序,不仅适用于 HDevelop,也支持多种编程语言。这些示例可在环境变量 %HALCONEXAMPLES% 指向的目录中找到;若未设置该变量,则位于 HALCON 安装目录下的 examples 子文件夹中。
打开 HDevelop 示例程序的方法:选择菜单:"文件 → 浏览 HDevelop 示例程序..."。
若要学习 HALCON 基础概念,建议查看示例程序
halcon_basic_concepts.hdev。 -
服务与支持
mvtec 官网(https://www.mvtec.com/services-support) 提供多种支持资源,例如教程视频、研讨会与培训信息、包含开发技巧的开发者专区等更多内容。 -
HALCON 文档
HALCON 文档包含从入门到专家级的丰富资料。
例如,我们的解决方案指南详细讲解机器视觉方法及其在 HDevelop 中的应用。
推荐从【解决方案指南 I(Solution Guide I)】开始学习,它介绍了主流机器视觉方法。
所有手册的概述与简要说明可在文档首页查看。
【本节完】
版权声明:
本文译自:HALCON:Quick Guide,版权属于 Copyright © 2003-2025 by MVTec Software GmbH, Munich, Germany。
转发必须注明原文链接:
【HALCON 实战入门】2. HALCON 快速入门 (https://youcans.blog.csdn.net/article/details/160250188)
Copyright by youcans@qq.com 2026
Crated:2026-04