带标注的红外热成像人,无人机,车辆,动物识别数据集,识别率91.9%,17800张图,支持yolo,coco json,voc xml格式,文末有模型训练代码
模型训练指标参数:

模型训练图:
数据集拆分
总图数:17800 张图数
训练集
17350 张图
验证集
244 张图
测试集
206 张图
预处理
自动方向校正:已执行
尺寸调整:适配至 640×640 分辨率(自动填充黑边)
自动对比度调整:采用自适应均衡化算法
增强
单个训练样本生成输出数量:10 个
翻转:水平翻转
90° 旋转:顺时针、逆时针、倒置
随机旋转:角度范围 -15° 至 +15°
剪切变换:水平 ±15°、垂直 ±15°
灰度化:对 15% 的图像应用
色相调整:范围 -25° 至 +25°
饱和度调整:范围 -34% 至 +34%
亮度调整:范围 -25% 至 +25%
模糊处理:最大模糊半径 3.5 像素
噪声添加:最多对 1.96% 的像素添加噪点
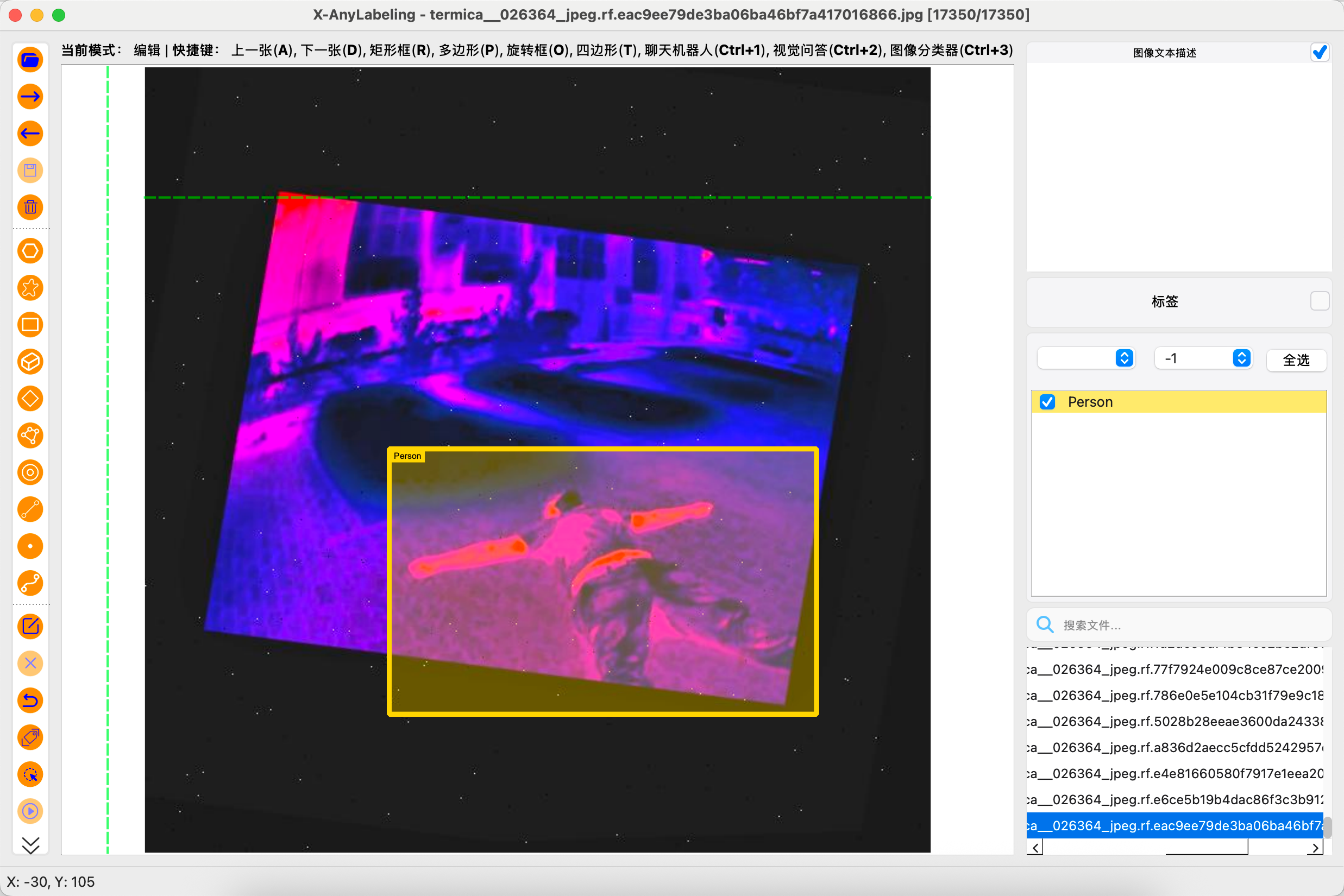
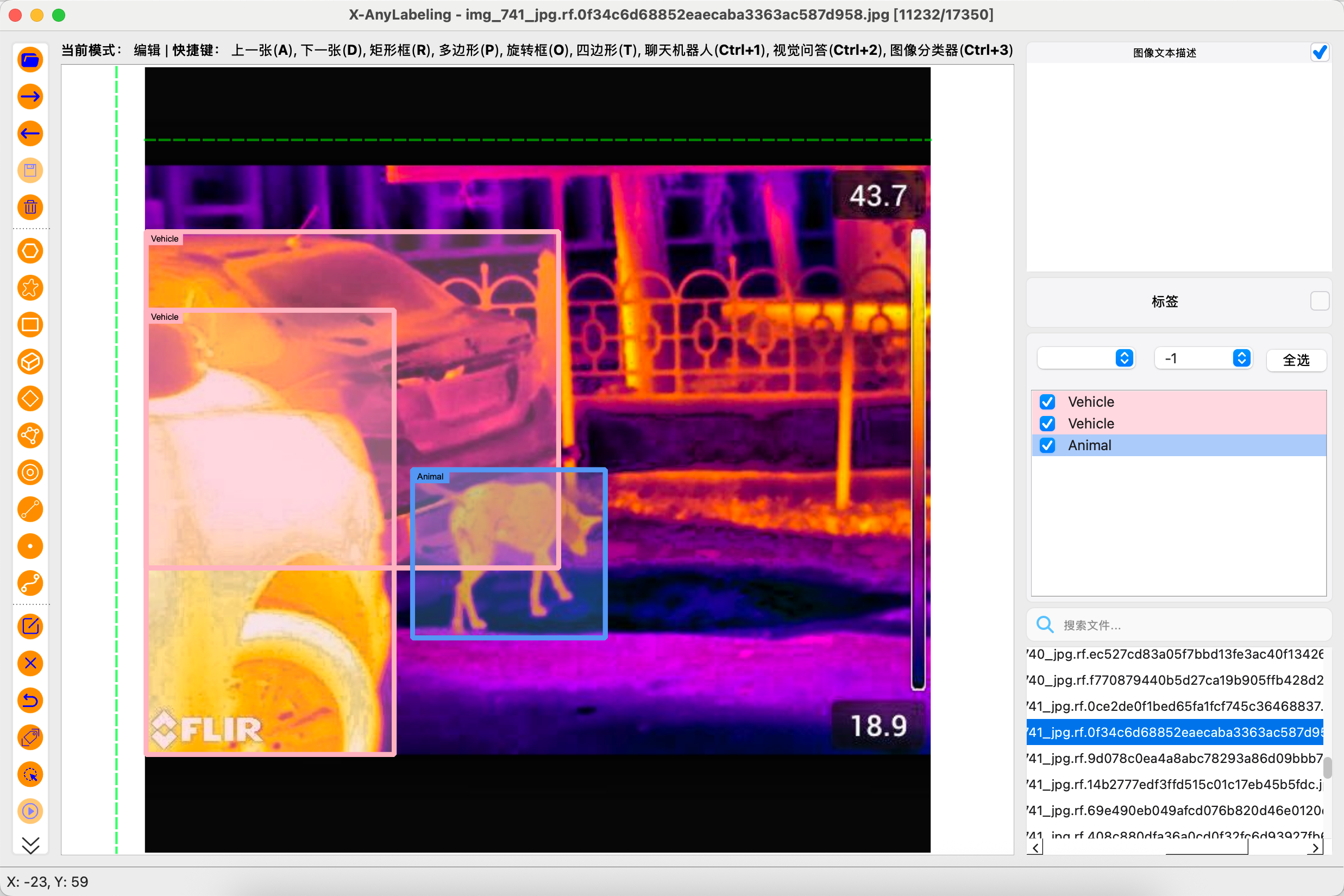
数据集标签:
'Vehicle', 'Animal', 'Person', 'Drone'
标签解释
Vehicle:车辆
Animal:动物
Person:人(行人)
Drone:无人机
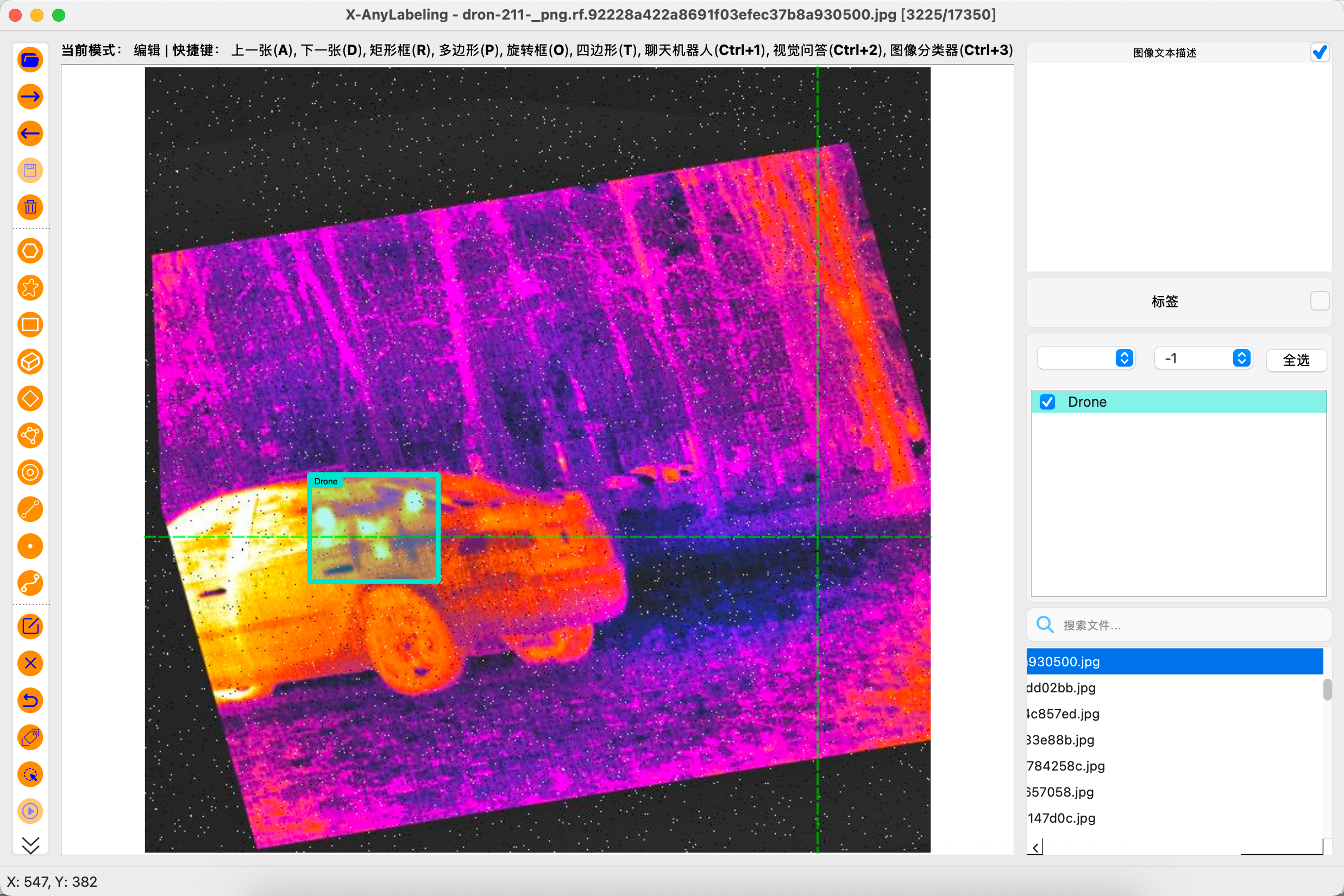
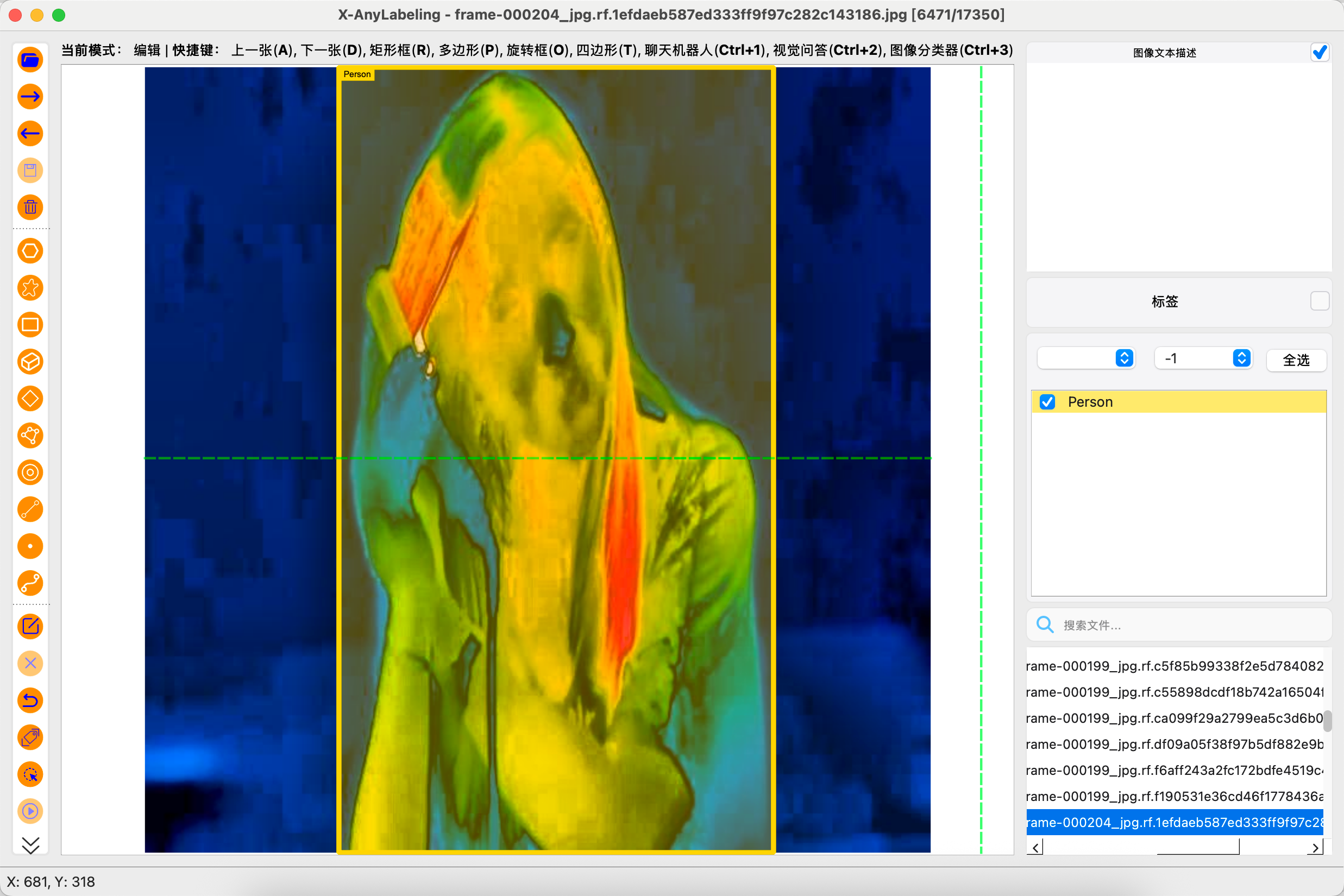
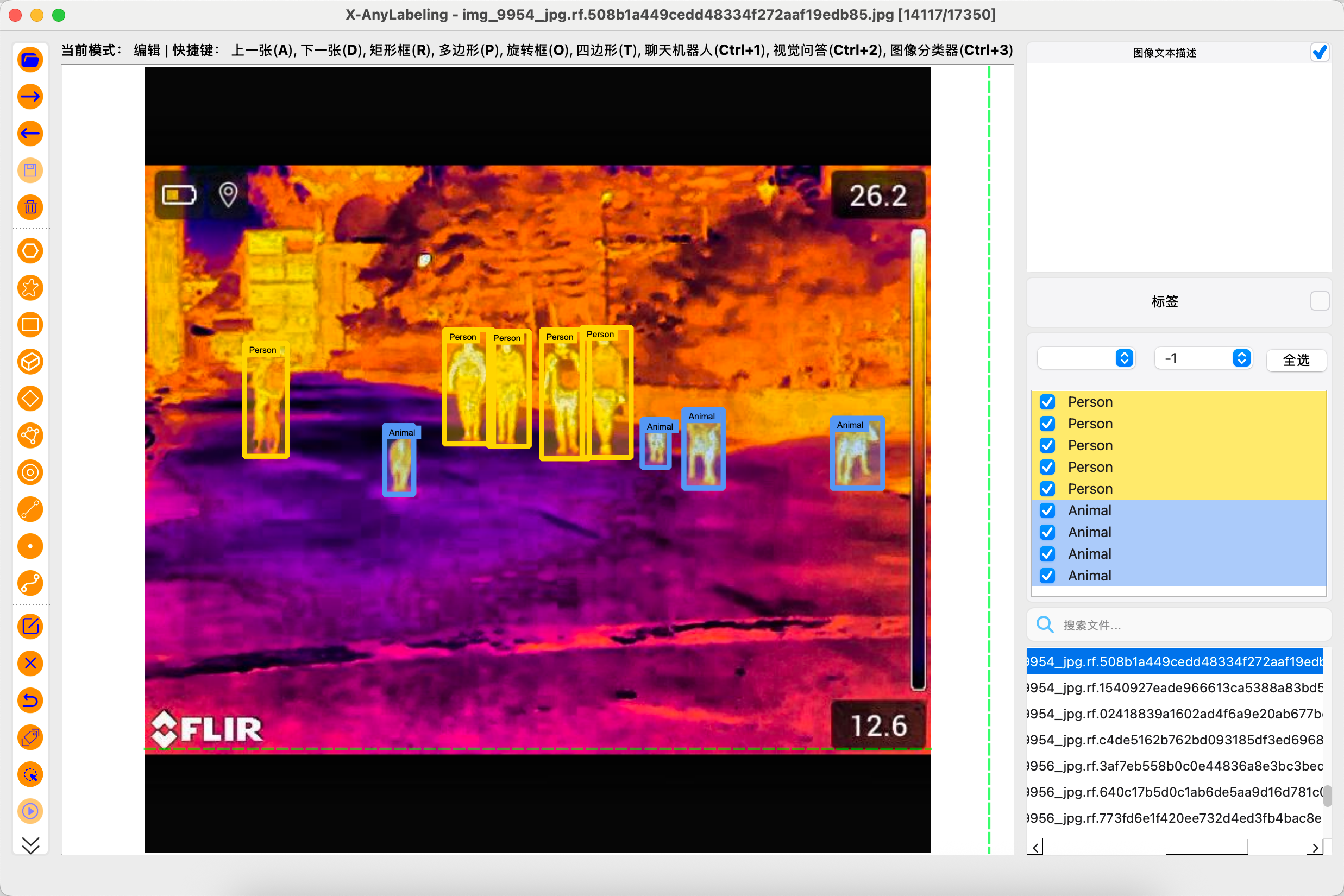
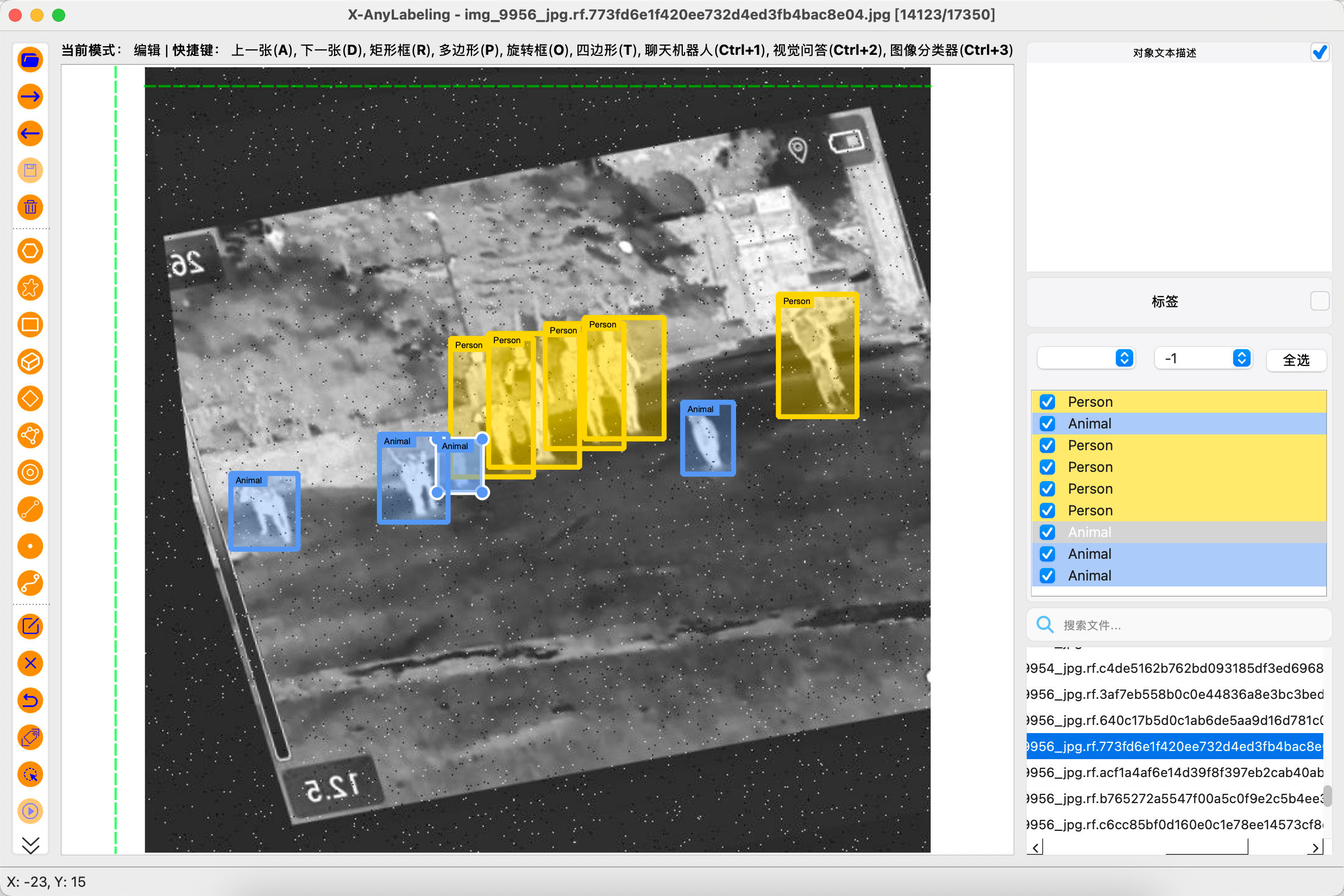
数据集图片和标注信息示例:
数据集下载:
yolo26:
yolo v12:
yolo v11
yolo v9:
yolo v8:
yolo v7:
coco json:
pascal voc xml:
由于模型太大,请在主页和作者取得联系获取
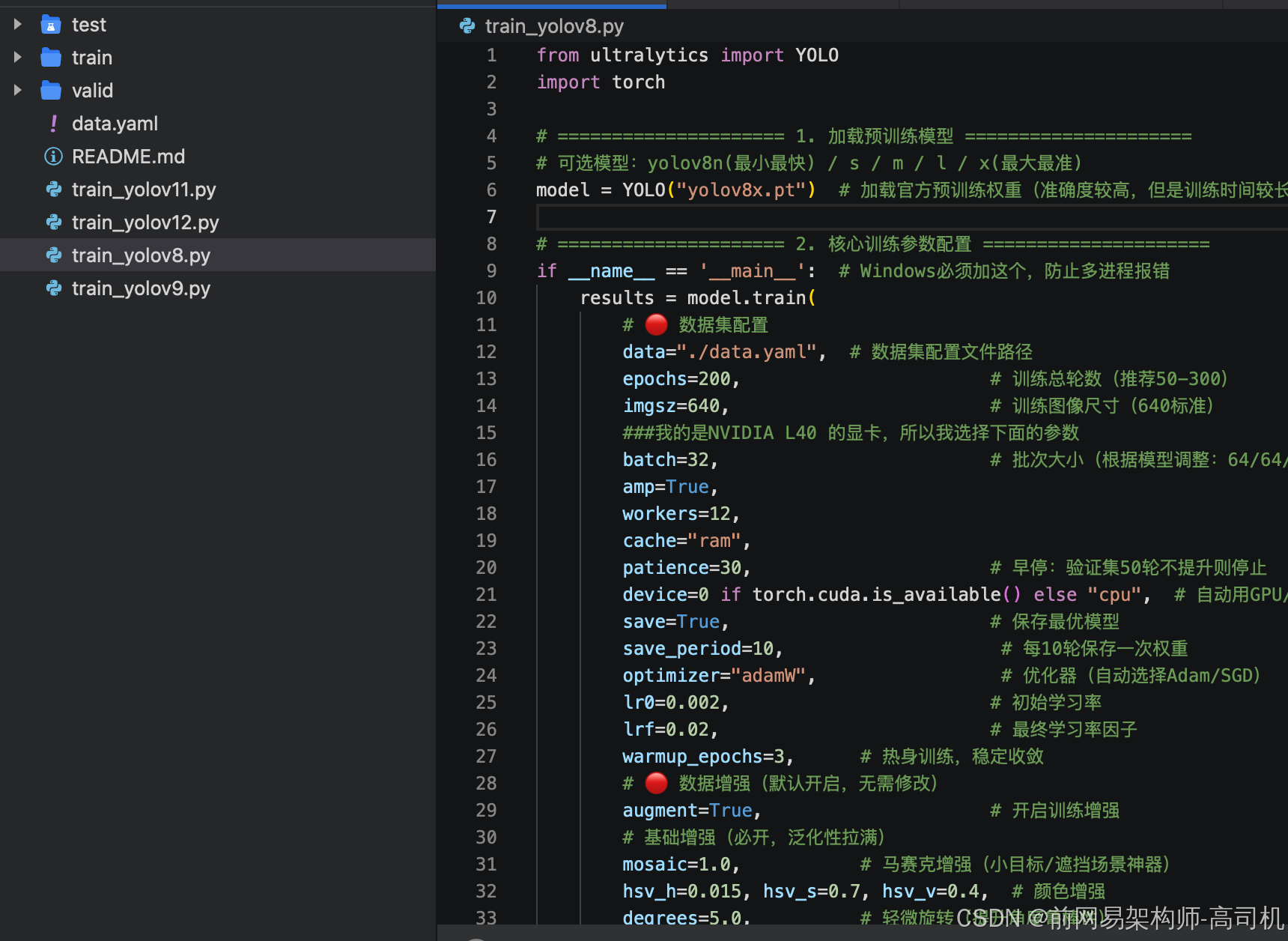
YOLO模型训练
下载数据集之后解压到当前文件夹,然后将 我的仓库 https://gitcode.com/pbymw8iwm/YOLOProject里的训练模型脚本复制到文件夹下,假设你使用的是yolov8来训练你就用 python train_yolov8.py
模型下载:
模型验证测试情况:
验证测试代码:
python
#需要安装pip install ultralytics
from ultralytics import YOLO
import cv2
# 加载训练好的 YOLO .pt 模型
model = YOLO('best.pt') # 替换为你实际的 .pt 模型文件路径
# 定义要测试的图片路径
image_path = './image.jpg' # 替换为你实际的图片文件路径
# 使用模型对图片进行预测
results = model(image_path)
# 获取预测结果
for result in results:
# 获取绘制了检测框的图片
annotated_image = result.plot()
# 显示图片
cv2.imshow("YOLOv Inference", annotated_image)
# 等待按键退出
cv2.waitKey(0)
# 关闭所有 OpenCV 窗口
cv2.destroyAllWindows()