深度剖析Linux按键驱动四种访问方式:从查询到异步通知
目录导航
- 开篇:一个生动的比喻
- 四种方式概览与核心思想
- 方式一:查询方式 ------ 最简单,但最累
- 核心思想与流程
- 代码实现详解
- 代码调用链路分析
- 优缺点与疏导总结
- 方式二:休眠-唤醒方式 ------ 高效,但可能永久等待
- 核心思想与流程
- 代码实现详解(含中断与等待队列)
- 代码调用链路分析
- 优缺点与疏导总结
- 方式三:poll方式 ------ 带超时机制的休眠唤醒
- 核心思想与流程
- 代码实现详解(驱动+应用)
- 代码调用链路分析
- 优缺点与疏导总结
- 方式四:异步通知方式 ------ 最高效,事件驱动
- 核心思想与流程
- 代码实现详解(信号驱动)
- 代码调用链路分析
- 优缺点与疏导总结
- 终极对比总结与选择建议
- 掌握度自测:一眼看穿答案的几道题
开篇:一个生动的比喻
在深入代码之前,我们先回忆一下那个经典的比喻。这个比喻能帮你建立起对这四种方式最直观的理解。
妈妈怎么知道卧室里小孩醒了?
- 查询方式 :妈妈每隔几分钟就推门进去看一次 。孩子没醒,就出来继续干活;醒了,就处理。简单,但妈妈累得够呛,而且可能错过孩子刚醒的瞬间。
- 休眠-唤醒方式 :妈妈直接躺在孩子旁边睡 。孩子一醒,肯定会把妈妈吵醒。妈妈不累,但啥活也干不了了。如果孩子一直不醒,妈妈也一直睡下去。
- poll方式 :妈妈定个闹钟(比如30分钟),然后睡在孩子旁边 。要么被孩子吵醒,要么被闹钟叫醒。醒了之后看看情况,如果孩子没醒,就再定个闹钟继续睡。既能休息,又能抽空干点活。
- 异步通知方式 :妈妈在客厅安心干活 ,并告诉孩子:"你醒了就自己跑出来找我"。孩子醒了,自己就跑出来找妈妈。妈妈和孩子互不耽误,效率最高。
这个比喻非常贴切,接下来我们就把这四个场景,用代码一一复现。
四种方式概览与核心思想
| 方式 | 核心机制 | APP行为 | 驱动核心函数 | 适用场景 |
|---|---|---|---|---|
| 查询 | 主动、循环读取 | 一直调用read,不睡眠 |
read |
实时性要求极高,或数据变化极快 |
| 休眠-唤醒 | 被动等待,事件驱动 | 调用read后睡眠,中断唤醒 |
read, 中断 |
事件发生不频繁,且APP可独占等待 |
| poll/select | 带超时的休眠 | 调用poll睡眠一段时间或被唤醒 |
poll, read, 中断 |
需要等待多个文件,或有超时要求 |
| 异步通知 | 信号驱动,完全异步 | 注册信号处理函数,继续做其他事 | fasync, read, 中断 |
追求最高效率,事件随机性强 |
方式一:查询方式 ------ 最简单,但最累
这是最朴素的方式,APP就像一个勤劳的巡检员,一刻不停地去查看按键状态。
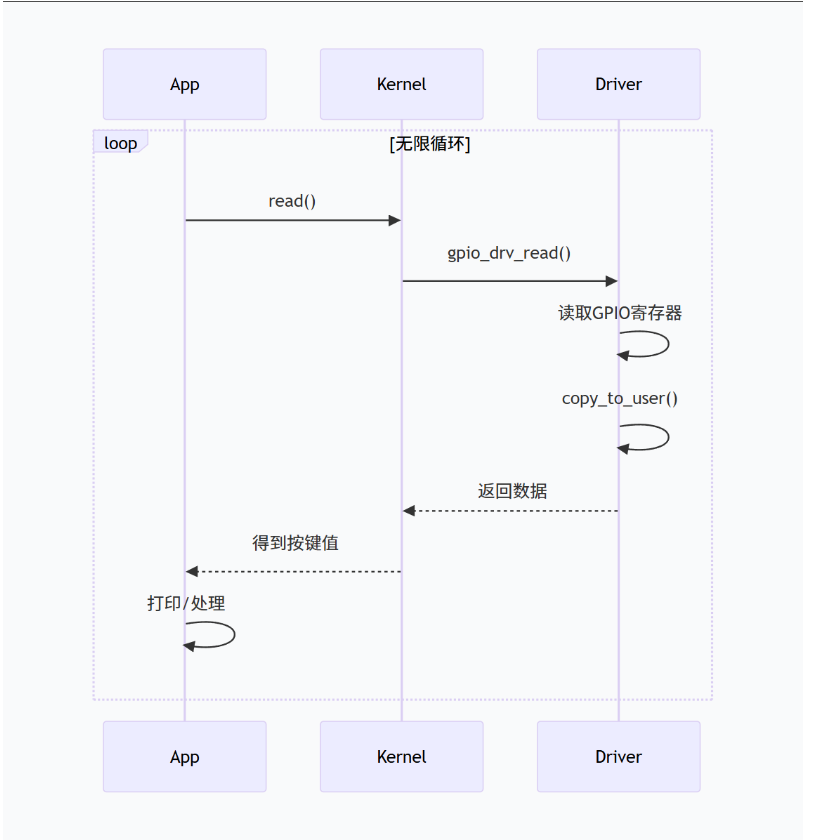
核心思想与流程
- APP :调用
open打开设备,然后在一个死循环中不断调用read。 - 驱动 :在
read函数中,不判断是否有数据,直接读取GPIO寄存器的当前电平,并返回给APP。

代码实现详解
驱动端 (gpio_key_drv.c)
c
// 驱动核心:read函数直接返回硬件状态
static ssize_t gpio_drv_read(struct file *file, char __user *buf,
size_t size, loff_t *offset)
{
int key_value;
// 假设我们有一个函数可以直接读取GPIO电平
key_value = gpio_read_raw(gpio_pin);
// 直接拷贝给用户空间,不睡眠,不等待
if (copy_to_user(buf, &key_value, sizeof(key_value)))
return -EFAULT;
return sizeof(key_value);
}
// file_operations结构体
static struct file_operations gpio_drv_fops = {
.owner = THIS_MODULE,
.open = gpio_drv_open, // 负责配置GPIO为输入
.read = gpio_drv_read, // 核心:查询读取
};应用程序端 (app_query.c)
c
int main(int argc, char **argv)
{
int fd;
int val;
fd = open("/dev/gpio_key", O_RDWR);
if (fd == -1) {
printf("can not open file!\n");
return -1;
}
while (1) {
// 核心:死循环,不断调用read进行查询
read(fd, &val, sizeof(val));
printf("get button value: %d\n", val);
// 注意:这里没有sleep,CPU占用率会非常高
// 可以加个短暂的sleep来降低CPU占用,但这会降低实时性
// usleep(10000); // 10ms
}
return 0;
}代码调用链路分析
优缺点与疏导总结
- 优点:代码实现极其简单,逻辑清晰,无需中断、无需等待队列。
- 缺点 :CPU占用率极高。即使没有任何按键操作,APP也一直在疯狂占用CPU资源进行无效查询。这在资源受限的嵌入式系统中是不可接受的。
- 疏导 :查询方式理解了,你就知道了"为什么需要其他几种方式"。它揭示了驱动程序的一个核心原则:不要让CPU做无谓的等待。当没有数据时,驱动程序应该主动"让出CPU",让其他进程有机会运行,这就是"休眠"机制的由来。
方式二:休眠-唤醒方式 ------ 高效,但可能永久等待
为了解决查询方式浪费CPU的问题,我们引入了"休眠-唤醒"机制。没有数据时,APP进入睡眠状态,交出CPU;数据到来时,由硬件中断将APP唤醒。
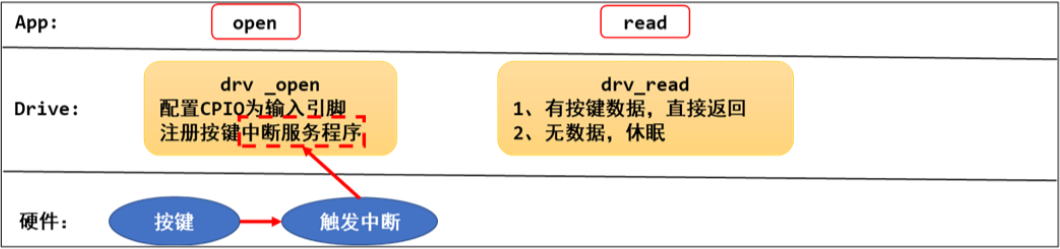
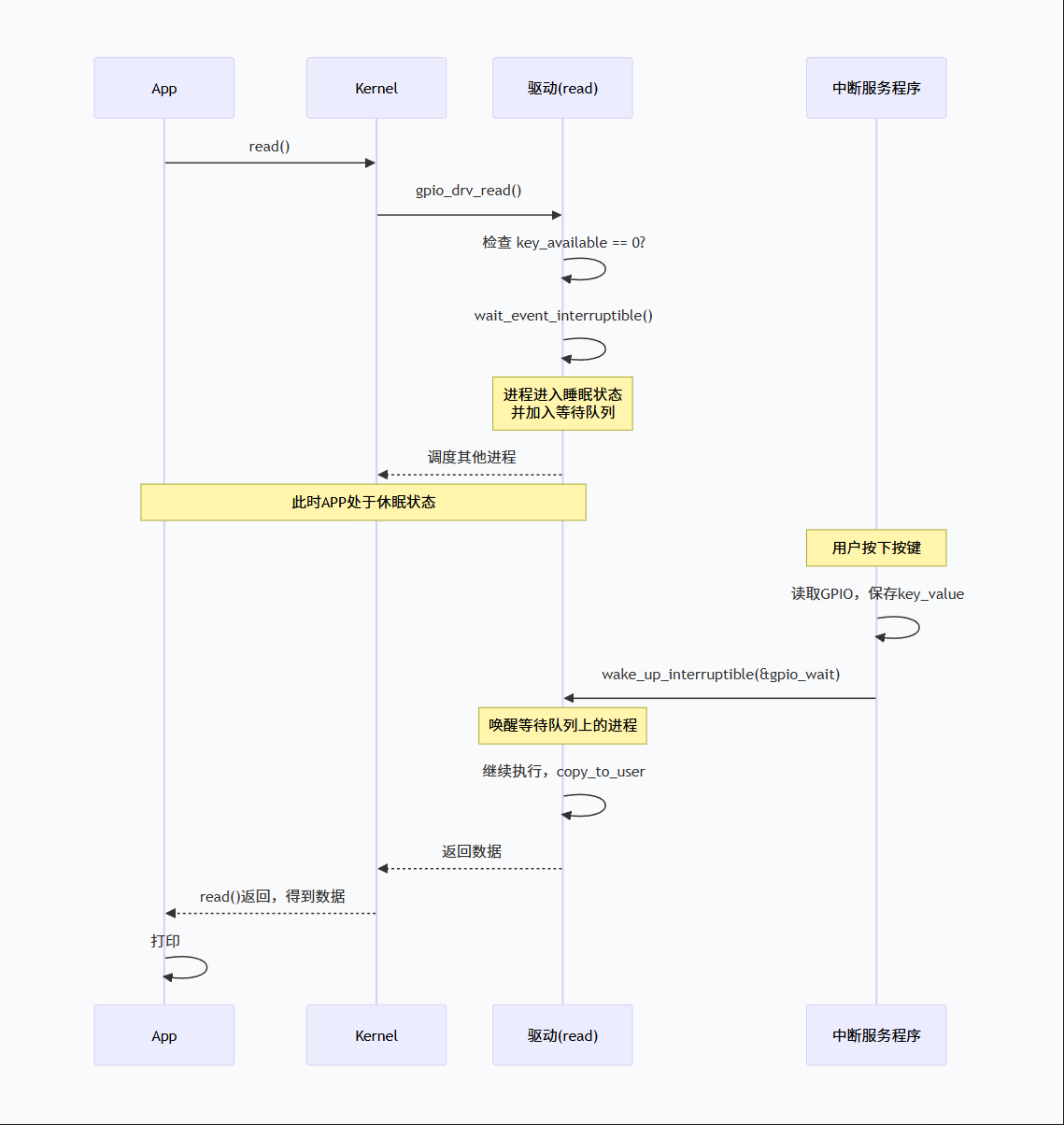
核心思想与流程
- APP :调用
open,然后调用read。如果没有数据,进程在内核态被设置为"睡眠"状态。 - 驱动 :
open函数中配置GPIO中断。read函数检查数据缓冲区,如果有数据,直接返回;如果没有,调用wait_event_interruptible让当前进程休眠。- 中断服务程序(ISR)被按键触发,它负责记录数据,并调用
wake_up_interruptible唤醒正在睡眠的进程。
代码实现详解(含中断与等待队列)
驱动端 (gpio_drv_sleep.c)
c
#include <linux/wait.h> // 等待队列头
// 1. 定义并初始化一个等待队列头
static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);
// 2. 定义一个环形缓冲区或变量来存放按键值
static int key_value = 0;
static int key_available = 0; // 是否有新数据标志
// 中断服务程序
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{
// 读取按键值,假设读取GPIO后得到val
int val = gpio_get_value(gpio_pin);
key_value = val;
key_available = 1; // 标记有新数据
// 关键步骤:唤醒等待队列上的进程
wake_up_interruptible(&gpio_wait);
return IRQ_HANDLED;
}
// 驱动的read函数
static ssize_t gpio_drv_read(struct file *file, char __user *buf,
size_t size, loff_t *offset)
{
int ret;
// 关键步骤:如果没有数据,则休眠等待
// 条件为假(key_available == 0)时,进程进入休眠
wait_event_interruptible(gpio_wait, key_available != 0);
// 被唤醒后,表示有数据了
ret = copy_to_user(buf, &key_value, sizeof(key_value));
key_available = 0; // 重置标志
return sizeof(key_value);
}应用程序端 (app_sleep.c)
应用程序代码与查询方式完全相同 ,只是打开设备时通常不指定O_NONBLOCK标志。
c
fd = open("/dev/gpio_key", O_RDWR); // 默认是阻塞方式
while (1) {
read(fd, &val, sizeof(val)); // 此处会阻塞,直到有按键
printf("get button: 0x%x\n", val);
}代码调用链路分析
优缺点与疏导总结
- 优点 :完美解决了CPU空转问题。没有按键时,APP不占用任何CPU资源,系统可以运行其他任务。这是现代操作系统高效运行的基础。
- 缺点 :APP可能会永久休眠 。如果硬件损坏或者永远不会触发中断,
read调用将永远不返回。这在某些场景下是不可接受的。 - 疏导 :休眠-唤醒机制是驱动开发的基石。它引入了两个核心概念:等待队列(Wait Queue) 和中断上下文 。
- 等待队列是实现线程安全休眠/唤醒的标准内核机制。
- 中断服务程序 运行在特殊的中断上下文,不能调用任何可能睡眠的函数(如
copy_to_user)。因此我们只在ISR中做最少量、最关键的工作(记录数据、唤醒进程),数据处理(拷贝到用户空间)留给被唤醒的进程去做。这就是"中断顶半部和底半部"思想的雏形。
方式三:poll方式 ------ 带超时机制的休眠唤醒
为了解决休眠-唤醒方式可能永久等待的问题,我们引入poll或select系统调用。它们允许APP设置一个超时时间。
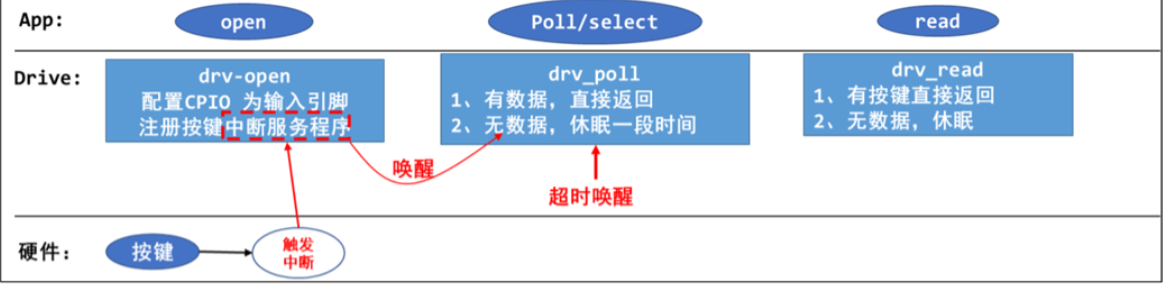
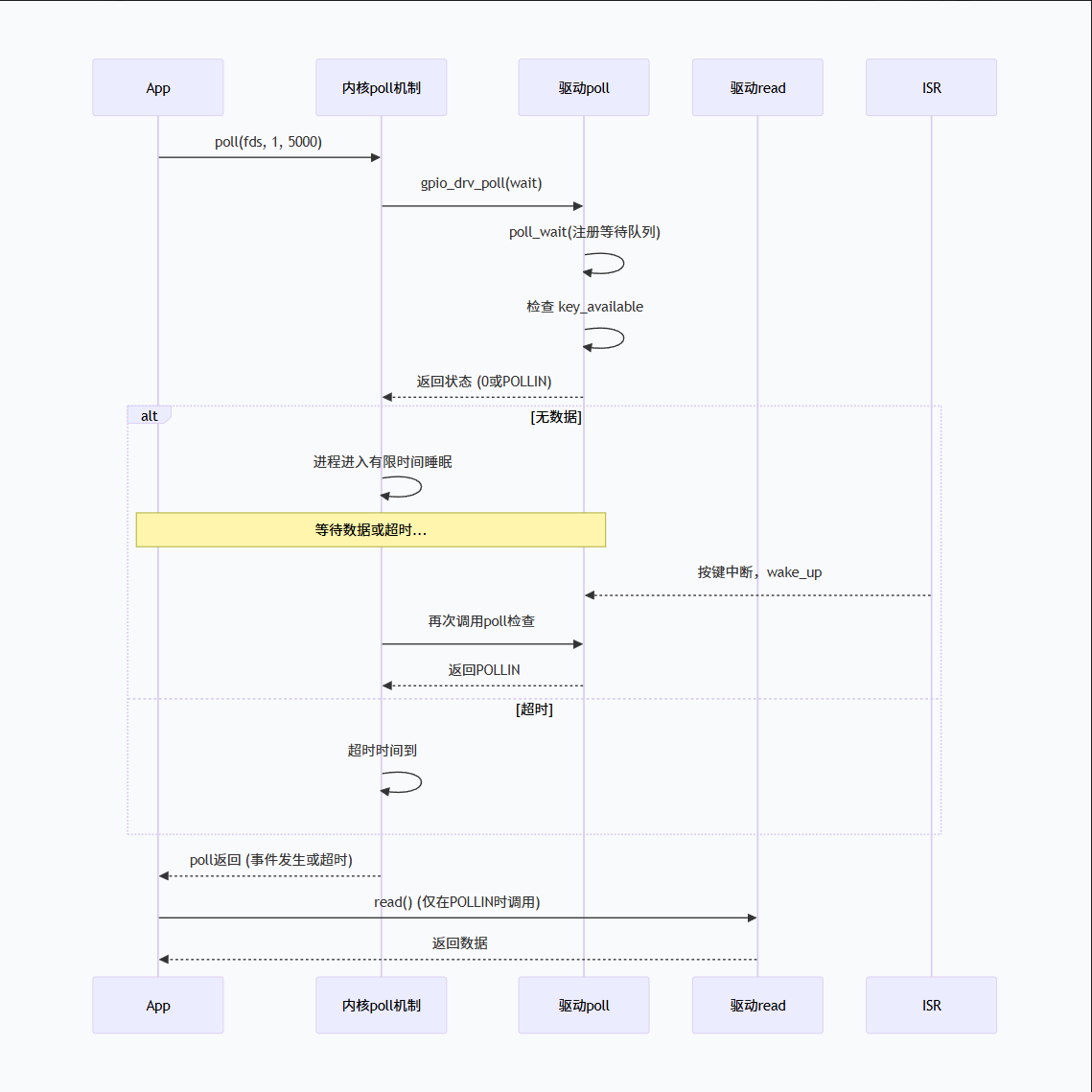
核心思想与流程
- APP :调用
poll函数,并传入一个文件描述符数组和超时时间。 - 驱动 :实现
poll函数。- 驱动中的
poll函数会调用poll_wait将当前进程注册到等待队列中。 - 然后检查数据是否可用。如果可用,立即返回
POLLIN标志;如果不可用,返回0。 - 内核会循环检查,直到数据可用或超时时间到达。在此期间,进程可能多次进出休眠状态。
- 驱动中的
代码实现详解(驱动+应用)
驱动端 (gpio_drv_poll.c)
c
// 在原有休眠-唤醒驱动基础上,增加 .poll 函数
static unsigned int gpio_drv_poll(struct file *fp, poll_table * wait)
{
// 1. 关键步骤:将当前进程加入到等待队列gpio_wait中
// 注意,这并不会让进程休眠,只是注册了一个"关注点"
poll_wait(fp, &gpio_wait, wait);
// 2. 检查是否有数据
if (key_available != 0) {
// 有数据,返回POLLIN,表示可读
return POLLIN | POLLRDNORM;
}
// 3. 没有数据,返回0
return 0;
}
static struct file_operations gpio_drv_fops = {
.owner = THIS_MODULE,
.open = gpio_drv_open,
.read = gpio_drv_read, // read函数实现与休眠-唤醒方式完全一样
.poll = gpio_drv_poll, // 新增的poll函数
};应用程序端 (app_poll.c)
c
#include <poll.h>
#include <fcntl.h>
int main(int argc, char **argv)
{
int fd;
int val;
int ret;
struct pollfd fds[1];
int timeout_ms = 5000; // 超时时间:5秒
fd = open(argv[1], O_RDWR);
if (fd == -1) return -1;
fds[0].fd = fd;
fds[0].events = POLLIN; // 关心可读事件
while (1) {
// 核心:使用poll代替read
ret = poll(fds, 1, timeout_ms);
if (ret == -1) {
printf("poll error\n");
} else if (ret == 0) {
// poll返回0表示超时
printf("poll: timeout\n");
} else {
// ret > 0 表示有事件发生
if (fds[0].revents & POLLIN) {
// 确认是可读事件,再调用read读取数据
read(fd, &val, sizeof(val));
printf("get button: 0x%x\n", val);
}
}
}
return 0;
}代码调用链路分析
优缺点与疏导总结
- 优点 :解决了永久阻塞的问题,提供了超时机制 。同时
poll可以同时监控多个文件描述符,这是构建复杂事件驱动应用的基石(例如同时等待按键、触摸屏和网络数据)。 - 缺点 :实现比单纯的休眠-唤醒稍复杂,但非常标准。
poll函数内部仍然可能发生多次进程切换,有一定开销。 - 疏导 :
poll机制的精髓在于将"等待"和"读取"两个动作分离 。poll只负责告诉你"数据准备好了没有",而不负责传输数据。这符合Unix"做一件事,并做好 "的设计哲学。poll_wait函数非常重要,它只是注册,不是睡眠。真正的睡眠是由内核的poll实现循环调度的。理解这一点,你就明白了为什么在poll函数中不能直接schedule()。
方式四:异步通知方式 ------ 最高效,事件驱动
这是最高级的方式,它让驱动程序变成了一个"主动汇报者",而不是被动等待APP来查询。它使用了Unix信号(Signal)机制。
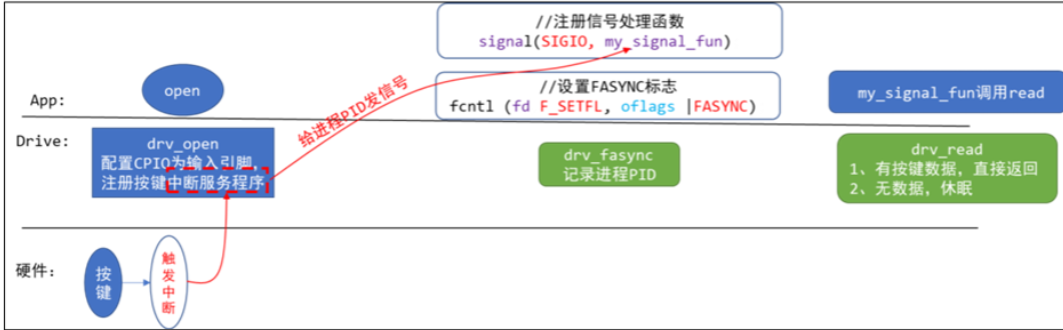
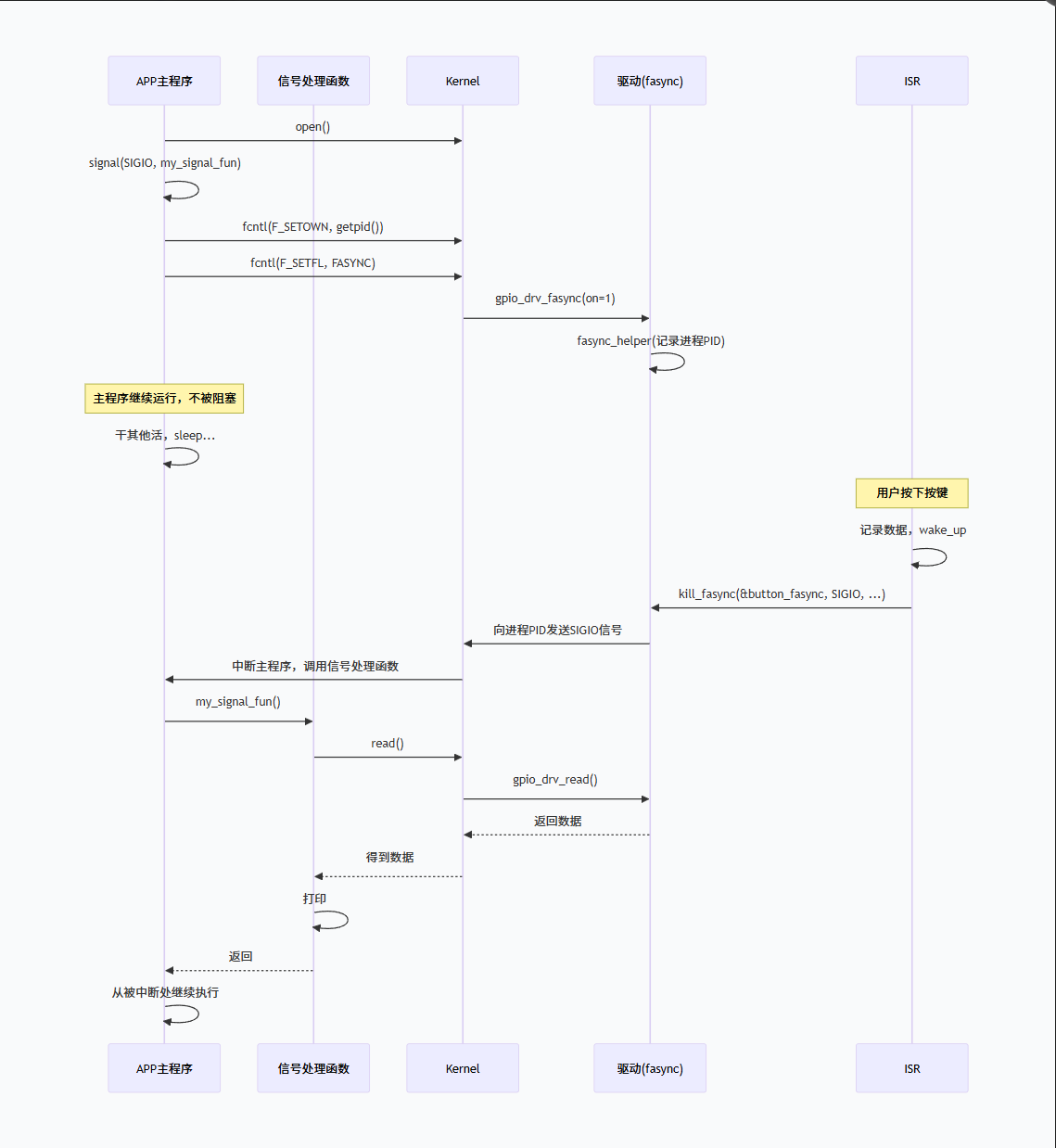
核心思想与流程
- APP :
- 注册
SIGIO信号的处理函数。 - 调用
fcntl设置FASYNC标志,告诉内核"我想收到这个文件的异步通知"。 - 然后APP就可以去做其他任何事了。
- 注册
- 驱动 :
- 实现
.fasync函数,用于记录和释放发送信号的进程信息。 - 在中断服务程序中,当数据准备好后,调用
kill_fasync函数向之前记录的所有进程发送SIGIO信号。 - APP收到信号后,暂停当前工作,去执行信号处理函数,在信号处理函数中调用
read读取数据。
- 实现
代码实现详解(信号驱动)
驱动端 (gpio_drv_async.c)
c
#include <linux/fs.h> // for fasync_struct
// 1. 定义一个fasync结构体指针
static struct fasync_struct *button_fasync;
// 2. 实现fasync函数
static int gpio_drv_fasync(int fd, struct file *filp, int on)
{
// 核心:调用标准函数 fasync_helper 来管理 fasync_struct
return fasync_helper(fd, filp, on, &button_fasync);
}
// 中断服务程序(在原有基础上增加发送信号的代码)
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{
// ... 读取按键值,存入缓冲区 ...
val = gpio_get_value(gpio_pin);
put_key_into_buffer(val);
// 核心:唤醒等待队列(给poll/read用)
wake_up_interruptible(&gpio_wait);
// 核心:向应用程序发送SIGIO信号
kill_fasync(&button_fasync, SIGIO, POLL_IN);
return IRQ_HANDLED;
}
static struct file_operations gpio_drv_fops = {
.owner = THIS_MODULE,
.open = gpio_drv_open,
.read = gpio_drv_read, // read实现与休眠-唤醒类似,但可由信号触发
.poll = gpio_drv_poll, // 依然可以实现poll以兼容
.fasync = gpio_drv_fasync, // 新增异步通知函数
};应用程序端 (app_async.c)
c
#include <signal.h>
#include <unistd.h>
#include <fcntl.h>
int fd; // 全局变量,以便在信号处理函数中使用
// 信号处理函数
void my_signal_fun(int sig)
{
int val;
if (sig == SIGIO) {
// 在信号处理函数中读取数据
read(fd, &val, sizeof(val));
printf("Async get button: 0x%x\n", val);
// 注意:信号处理函数中应避免调用非异步信号安全的函数,但read通常可以
}
}
int main(int argc, char **argv)
{
int flags;
// 1. 打开设备
fd = open(argv[1], O_RDWR);
if (fd == -1) return -1;
// 2. 注册SIGIO信号的处理函数
signal(SIGIO, my_signal_fun);
// 3. 设置本进程为设备文件的"所有者",这样驱动才知道把信号发给谁
fcntl(fd, F_SETOWN, getpid());
// 4. 获取当前文件状态标志,并添加FASYNC标志,触发驱动的 .fasync
flags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, flags | FASYNC);
// 5. 主程序可以安心去做其他事了
while (1) {
printf("APP is doing other important work...\n");
sleep(2);
}
return 0;
}代码调用链路分析
优缺点与疏导总结
- 优点 :效率最高,实现了解耦 。APP无需主动查询或等待,可以完全专注于自己的主要任务。驱动程序在事件发生时主动通知。这是典型的"好莱坞原则"(Don't call us, we'll call you)。
- 缺点 :实现相对复杂,涉及信号、进程间通信等概念。信号处理函数中有很多限制(比如不能调用
printf等非异步信号安全的函数,示例中为简化使用了printf)。 - 疏导 :异步通知是Linux下实现事件驱动编程的经典模式 。其核心在于
fasync_struct结构体和kill_fasync函数。它本质上是一个"观察者模式 "的内核实现:驱动程序是被观察者,APP是观察者。当事件发生时,驱动程序通知所有注册过的观察者。fasync_helper负责维护这个观察者列表。这种方式不仅用于按键,在socket、串口等需要高实时性异步通知的场景中也被广泛使用。
终极对比总结与选择建议
| 特性 | 查询 | 休眠-唤醒 | poll/select | 异步通知 |
|---|---|---|---|---|
| CPU占用 | 极高 | 极低 | 低 | 极低 |
| 实时性 | 最好(取决于查询频率) | 好 | 好 | 最好 |
| 代码复杂度 | 非常简单 | 简单 | 中等 | 复杂 |
| 单/多文件 | 单文件 | 单文件 | 多文件 | 单/多文件 |
| 超时支持 | 需手动实现 | 无 | 有 | 无 |
| 适用场景 | 极简单调试,或数据变化极快 | 单任务,事件不频繁且可接受永久等待 | 需要等待多个事件,或有超时要求 | 高并发,事件驱动的高效应用,如GUI、网络服务 |
选择建议:
- 教学/调试:查询方式。
- 简单驱动,专用任务:休眠-唤醒。
- 需要同时监控多个设备(如按键+触摸屏)或有超时需求 :
poll/select。 - 构建大型、高效、非阻塞的应用程序(如Qt/GTK应用、网络服务器) :异步通知(常与
epoll等配合,SIGIO是epoll的底层机制之一)。
深度理解自测:四种驱动访问方式
1. 在休眠-唤醒方式的驱动中,如果中断服务程序(ISR)里直接调用 copy_to_user 将按键值传回用户空间,会引发什么问题?为什么?
答案:
会引发内核崩溃(oops)或系统死锁。原因如下:
copy_to_user可能引起缺页异常 (用户空间内存未映射或换出),内核需要睡眠来换入页面。- 中断服务程序运行在中断上下文 中,不允许睡眠(
in_interrupt()为真)。睡眠会导致调度器无法运行,因为中断上下文不关联任何进程,无法被唤醒。 - 正确做法:ISR 只做最少的事(读硬件、存数据、唤醒等待队列),数据拷贝交给被唤醒的进程在进程上下文 中完成(即
read函数内)。
2. poll 机制中,驱动层的 .poll 函数内部调用了 poll_wait,这个调用会让当前进程立即进入睡眠吗?如果不是,真正的睡眠发生在哪里?
答案:
不会立即睡眠 。poll_wait 的作用是:
- 将当前进程(
current)添加到wait_queue_head_t中,但不主动调度。 - 它只是注册一个"等待器",告诉内核:如果将来有事件(中断),请唤醒这个进程。
- 真正的睡眠 发生在内核的
do_poll循环中:- 内核调用驱动
.poll获取状态。 - 如果返回非零(有数据),则立即返回。
- 如果返回 0(无数据),内核调用
schedule_timeout()让进程进入有限时间睡眠。 - 超时或被
wake_up唤醒后,内核再次调用.poll检查状态,直到有数据或超时。
- 内核调用驱动
- 理解这一点就明白了:
.poll是轻量级查询函数 ,可以被反复调用;poll_wait只负责建立"唤醒路径",不负责睡眠。
3. 异步通知方式中,应用程序的信号处理函数里直接调用 printf 或 malloc 可能存在什么风险?正确的做法是什么?
答案:
风险 :printf、malloc 等函数不是异步信号安全的 (async-signal-safe)。信号处理函数执行时会打断主程序任意位置,如果主程序正持有 malloc 的堆锁,信号处理函数中再调用 malloc 会导致死锁 。printf 内部可能涉及 stdout 锁,同样危险。
正确做法:
- 在信号处理函数中只调用异步信号安全的函数 (如
write、read、_exit、signal)。 - 典型模式:信号处理函数中调用
read(fd, buf, size)读取数据(read是异步信号安全的),然后将数据放入无锁环形缓冲区 ,再设置一个全局标志。主循环检查该标志并安全地处理数据(可调用printf)。 - 更现代的方法:使用
signalfd将信号转换为文件描述符,用poll/epoll统一处理,避免在信号处理函数中做复杂操作。
4. 如果一个驱动同时实现了 .poll 和 .fasync,并且中断中既调用了 wake_up_interruptible 又调用了 kill_fasync。应用程序同时使用 poll 和异步通知(比如先 poll 等待,又注册了 SIGIO),可能产生什么竞争条件?如何解决?
答案:
竞争条件:
- 按键中断发生 → 驱动唤醒等待队列并发送信号。
poll返回POLLIN,应用程序准备调用read。- 但在调用
read之前,信号处理函数可能被调度执行,它调用了read提前取走了数据。 - 随后主程序中的
read调用可能因为缓冲区空而阻塞 (如果驱动未正确处理)或返回-EAGAIN。
解决方案:
- 驱动侧 :
read函数必须实现为:如果非阻塞且无数据,返回-EAGAIN;如果阻塞且无数据,休眠。这样可以容忍"虚假唤醒"。 - 应用侧 :采用两种策略之一:
- 统一使用异步通知 :不在主循环中调用
poll,完全依赖信号处理函数读取数据。 - 信号处理函数仅设置标志 :不在信号处理函数中直接
read,而是设置volatile sig_atomic_t flag = 1;主循环检查标志后调用poll(或直接read)并清除标志。这样数据读取由主循环统一控制,避免竞争。
- 统一使用异步通知 :不在主循环中调用
5. 查询方式虽然低效,但在某些场景下反而是最佳选择。请举一个具体的嵌入式例子,并解释为什么不能用休眠-唤醒或异步通知。
答案:
例子 :读取旋转编码器 或高频方波信号 (比如频率 > 10kHz)。
原因:
- 休眠-唤醒依赖中断,而高频率中断会导致系统响应延迟剧增,甚至丢失中断(因为中断处理本身有开销)。
- 异步通知同样依赖中断,信号处理函数频繁触发会使系统负载极高,且用户态信号处理有延迟。
- 查询方式可以在一个死循环中连续读取GPIO电平 ,配合 CPU 直连的快速 I/O 和缓存一致性,能准确捕获每一个电平变化。
- 优化:查询循环中关闭中断、使用
udelay去抖,甚至直接用 内存映射 I/O 配合while循环,实现微秒级采样。
结论 :查询方式适用于高实时性、低延迟、信号频率高于中断处理能力的场景,代价是占用单核 CPU 100%,但有时这是唯一可行的方案(例如软件实现 SPI 时序)。
6. select、poll 和 epoll 都是等待多个文件描述符的机制。为什么在按键驱动示例中通常使用 poll 而不是 epoll?epoll 有什么缺点?
答案 :
原因:
- 复杂度 :
pollAPI 简单,适合描述符数量少(< 10)的场景,按键驱动通常只监控 1~4 个按键。 - 触发模式 :
epoll默认是边缘触发(ET),需要应用程序一次性读光数据,否则会丢失事件。按键驱动数据量小(每次一个值),水平触发(LT)更自然,而poll天然是水平触发。 - 开销 :
epoll需要创建epoll实例、注册、等待等步骤,对于少量描述符,其内存开销和调用开销 大于poll。 - 可移植性 :
poll是 POSIX 标准,epoll是 Linux 特有,教学示例追求通用性。
epoll 的缺点:
- 不适用于普通文件(普通文件总是可读,导致
epoll一直返回事件)。 - 边缘触发模式下编程容易出错(需要非阻塞
read直到EAGAIN)。 - 在描述符很少时,性能并不比
poll高。
7. 驱动设计原则"提供能力,不提供策略"在这四种访问方式中是如何体现的?请结合代码举例说明。
答案 :
该原则意味着:驱动应该实现所有可能的访问机制 (查询、休眠、poll、异步通知),但不限制或强制 APP 使用哪一种。APP 根据自己的需求(实时性、CPU负载、复杂度)选择合适的机制。
代码体现:
-
驱动提供
.read(支持阻塞/非阻塞)、.poll(支持超时等待)、.fasync(支持信号驱动)。 -
没有策略 :驱动不会规定"你必须用 poll 否则效率低",也不会禁止查询方式。APP 可以通过
open时是否带O_NONBLOCK来选择阻塞/非阻塞;可以通过是否调用poll来选择超时等待;可以通过是否设置FASYNC来选择异步通知。 -
示例:
c
// APP 可以选择查询(非阻塞) fd = open("/dev/button", O_RDWR | O_NONBLOCK); while (1) { ret = read(fd, &val, 4); if (ret != -EAGAIN) break; } // APP 也可以选择阻塞休眠 fd = open("/dev/button", O_RDWR); // 默认阻塞 read(fd, &val, 4); // APP 还可以选择 poll poll(fds, 1, 2000); // APP 甚至选择异步通知 signal(SIGIO, handler); fcntl(fd, F_SETOWN, getpid()); fcntl(fd, F_SETFL, fcntl(fd, F_GETFL) | FASYNC); -
驱动内部通过检查
file->f_flags & O_NONBLOCK来决定read是否立即返回-EAGAIN;通过poll_table支持poll;通过fasync_helper支持异步通知。所有这些能力都同时提供,选择权完全交给 APP。