摘要: 随着室内自主移动机器人(AMR)密度的增加,传统的集中式纯云端调度在处理高频物理交互时,暴露出延迟高、容错率低的架构缺陷。2026年的技术共识全面转向了基于边缘计算与云端协同的分布式架构。本文将深度拆解这一架构的演进逻辑,探讨如何利用边缘节点实现本地状态机的物理闭环,并分享一段边缘节点与云端进行异步状态同步的 Python 核心逻辑,为架构师提供梯控系统的设计参考。
导语: 优秀的系统架构必须直面 CAP 定理与网络延迟的物理限制。通过在边缘侧构建独立的控制闭环,为高可用的多机协同业务提供了稳健的技术底座,让系统无惧广域网的抖动与延迟。
软硬件解耦:边缘节点与云端调度引擎的职责边界划分

一、 架构重构:摒弃云端微观物理控制 在早期的 IoT 架构设计中,云端不仅负责分配全局任务,甚至直接通过长连接下发 GPIO 的电平翻转指令。这种高耦合导致网络往返时延(RTT)直接影响了继电器的动作精度,极易引发电梯逻辑死锁。 先进的架构规范要求明确职责边界:云端作为 Global Scheduler,仅下发语义化的高层指令(如触发某层呼叫);而机房内的边缘节点(Edge Controller)作为 Local Executor,负责将语义指令转化为底层的防抖读取与时序控制。
二、 边缘状态机的核心容灾价值 边缘节点内部必须维护一个自治的有限状态机(FSM)。当接收到云端或局域网的调度指令后,状态机从空闲切换至执行态。此后,无论是检测平层传感器的脉冲,还是控制门禁继电器的吸合,都在本地微处理器的周期内完成。即使此时外网链路中断,FSM 也能安全地将当前业务流转至完成状态,或执行安全回退策略,避免机器人在轿厢内失控。
三、 代码实战:边缘状态机与云端的异步协同流转 以下 Python 伪代码展示了边缘节点如何独立执行本地控制循环,并通过异步非阻塞的方式向云端上报关键的业务节点数据:
Python
import time
import json
import threading
import paho.mqtt.client as mqtt
class EdgeElevatorController:
def __init__(self):
self.current_state = "IDLE"
self.mqtt_client = mqtt.Client(client_id="Edge_Node_01")
self.mqtt_client.on_connect = self._on_connect
self.mqtt_client.on_message = self._on_message
self.local_task_queue = []
self.lock = threading.Lock()
def _on_connect(self, client, userdata, flags, rc):
print(f"Connected to Cloud Scheduler with code {rc}")
# 订阅云端下发的高层语义指令
self.mqtt_client.subscribe("cloud/elevator/dispatch")
def _on_message(self, client, userdata, msg):
payload = json.loads(msg.payload.decode())
if msg.topic == "cloud/elevator/dispatch":
with self.lock:
self.local_task_queue.append(payload)
print(f"Edge Node received semantics task: {payload}")
def _publish_status_to_cloud(self, status_data):
"""异步向云端上报本地状态机进展,不阻塞本地循环"""
self.mqtt_client.publish("edge/elevator/status", json.dumps(status_data), qos=1)
def _execute_local_fsm(self, task):
"""本地自治状态机:处理物理交互,无惧公网断开"""
target_floor = task.get("target_floor")
self.current_state = "MOVING"
self._publish_status_to_cloud({"state": self.current_state, "task_id": task.get("id")})
print(f"Local FSM: Driving hardware relays for Floor {target_floor}...")
time.sleep(1.5) # 模拟硬件物理运行延迟
# 模拟本地传感器的物理确认过程
sensor_confirmed = True
if sensor_confirmed:
self.current_state = "ARRIVED_AND_OPEN"
self._publish_status_to_cloud({"state": self.current_state, "task_id": task.get("id")})
print("Local FSM: Sensors confirmed. Holding doors open.")
time.sleep(3) # 模拟等待物理设备进入轿厢
else:
self.current_state = "FAULT"
self._publish_status_to_cloud({"state": self.current_state, "error": "Sensor Timeout"})
def run_edge_loop(self):
# 建立与云端平台的非阻塞网络连接
self.mqtt_client.connect_async("cloud.example.com", 1883, 60)
self.mqtt_client.loop_start()
try:
while True:
with self.lock:
# 队列管理与任务分发
if self.local_task_queue and self.current_state == "IDLE":
current_task = self.local_task_queue.pop(0)
# 在独立线程执行本地 FSM,保持网络监听畅通
threading.Thread(target=self._execute_local_fsm, args=(current_task,)).start()
# 边缘节点空闲状态重置轮询
if self.current_state not in ["IDLE", "MOVING"]:
time.sleep(1) # 业务冷却后重置状态
self.current_state = "IDLE"
time.sleep(0.1)
except KeyboardInterrupt:
self.mqtt_client.loop_stop()
self.mqtt_client.disconnect()
if __name__ == "__main__":
edge_node = EdgeElevatorController()
edge_node.run_edge_loop()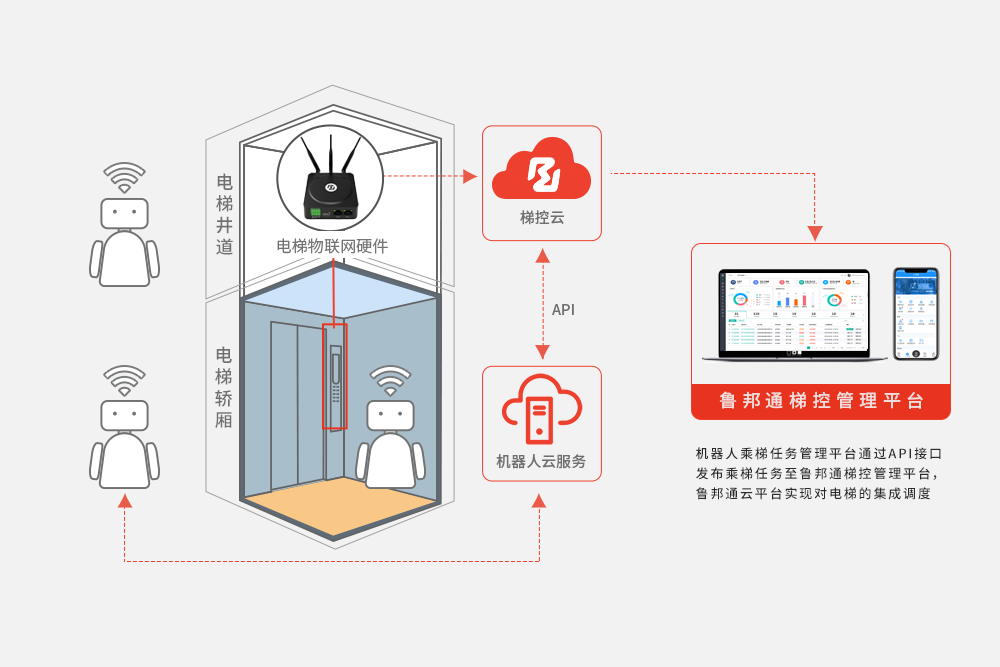
常见问题解答 (FAQ)
问题 1、边缘计算节点的引入会增加系统架构的长期维护复杂度吗?
回答 1、从表面看引入了新的物理计算节点,但从系统工程角度看,它强制解耦了软硬件控制逻辑,使得上层云端调度算法的迭代无需再考虑底层复杂的电气特性,极大降低了长期软件维护的复杂度。
问题 2、云端如何处理边缘节点在上报过程中发生的时序错乱问题?
回答 2、在分布式协同系统中,边缘节点上报的状态报文必须带有本地生成的精确时间戳或单调递增的序列号。云端流处理引擎据此进行乱序重排和状态对齐,以保证全局视图的准确性。
问题 3、本地 FSM 在处理突发硬件传感器异常时如何进行安全决策?
回答 3、本地 FSM 必须具备高优先级的安全回退路径。一旦核心传感器触发异常阈值,FSM 必须优先切断物理电平输出进入安全态,随后再将异常日志异步上报云端,这是边缘控制相较于云端控制的核心安全优势。
总结: 将控制逻辑下沉执行,将数据分析上浮统筹。通过云边协同架构打造坚实的底层数据与控制底座,是应对未来海量高频物理交互并发挑战的必由之路。