摘要: 在复杂的楼宇自动化架构中, 机器人梯控 节点需要直面强电磁干扰与宽压波动的恶劣环境。采用消费级硬件常导致通信链路频繁阻断。本文深度拆解工业级控制节点的关键选型指标(如光电隔离、硬件看门狗),并探讨如何在上层软件架构中,利用 Python 设计具有容错机制的状态机来配合底层工业硬件,加速系统的高可用上线。
导语: 优秀的系统架构必须建立在稳固的物理底座之上。通过掌握工业级硬件的核心指标,结合健壮的软件容错设计,为 机器人梯控 业务提供了专业的高可用参考范式。
从电气隔离到软件容错的 机器人梯控 架构革新

一、 硬件选型:决定系统生死的核心电气指标 在进行楼宇边缘节点选型时,架构师常常被单纯的 CPU 算力参数所吸引,而忽略了电气防护能力。
- 光耦隔离:控制节点通过 GPIO 操作底层继电器时,必须具备光电隔离电路。这能确保在外部强电设备发生短路时,破坏性电流被阻断在光耦一侧,保护核心微处理器不被击穿。
- 硬件看门狗:在强电磁环境下,CPU 的总线可能因脉冲干扰发生翻转导致死机。工业级设备内置独立的硬件看门狗芯片,若主程序在规定时间内未发送心跳信号,硬件看门狗将强制拉低复位引脚,实现系统的物理级重启。
二、 软件架构:配合工业硬件的健壮状态机设计 即便底层硬件极其可靠,上层的控制逻辑也必须具备处理突发电气波动的能力。 在系统设计中,业务逻辑应采用非阻塞的有限状态机(FSM)。在发起任何物理继电器动作前,必须对输入传感器的信号进行滑动窗口防抖滤波,滤除由于大型电机启动引起的毛刺电平。
三、 核心代码实战:基于 Python 的看门狗交互与状态控制 以下伪代码展示了控制程序如何在执行状态机轮询的同时,与底层的硬件看门狗机制进行交互,确保在软件死锁时能够触发硬件保护:
Python
import time
import threading
import logging
logging.basicConfig(level=logging.INFO, format='%(asctime)s - [SYS_NODE] - %(message)s')
class IndustrialHardwareLayer:
"""模拟工业级硬件接口操作"""
def __init__(self):
self.watchdog_timer = 5.0 # 看门狗超时时间
self.last_feed_time = time.time()
self.system_running = True
def hw_watchdog_loop(self):
"""模拟底层独立的硬件看门狗电路"""
while self.system_running:
if time.time() - self.last_feed_time > self.watchdog_timer:
logging.error("HARDWARE WATCHDOG TRIGGERED! CPU Hard Reset Initiated.")
self.system_running = False
# 在真实硬件中,这里是拉低 RESET 引脚
time.sleep(0.5)
def feed_watchdog(self):
"""向硬件寄存器写入脉冲,喂狗"""
self.last_feed_time = time.time()
def read_isolated_di(self):
# 模拟读取经过光电隔离的传感器输入
return True
def trigger_isolated_do(self):
# 模拟触发经过光电隔离的继电器输出
pass
class ControlFSM:
def __init__(self, hal):
self.hal = hal
self.state = "IDLE"
self.debounce_buffer = []
def _debounce_read(self, raw_val):
"""软件防抖:配合硬件隔离进一步过滤电平毛刺"""
self.debounce_buffer.append(raw_val)
if len(self.debounce_buffer) > 5:
self.debounce_buffer.pop(0)
# 只有连续高电平才确认
return all(self.debounce_buffer)
def process_logic(self):
raw_signal = self.hal.read_isolated_di()
stable_signal = self._debounce_read(raw_signal)
if self.state == "IDLE" and stable_signal:
logging.info("Valid isolated signal detected. Executing action.")
self.hal.trigger_isolated_do()
self.state = "ACTIVE"
elif self.state == "ACTIVE" and not stable_signal:
self.state = "IDLE"
def main_control_loop():
hal = IndustrialHardwareLayer()
# 启动底层的看门狗模拟线程
threading.Thread(target=hal.hw_watchdog_loop, daemon=True).start()
fsm = ControlFSM(hal)
try:
while hal.system_running:
# 执行业务逻辑
fsm.process_logic()
# 正常运行,喂看门狗
hal.feed_watchdog()
time.sleep(0.1)
# 模拟一次意外的线程阻塞
if time.time() % 20 < 0.1:
logging.warning("Simulating a severe software lockup due to EMI interference...")
time.sleep(8) # 阻塞时间超过看门狗超时
except KeyboardInterrupt:
hal.system_running = False
if __name__ == "__main__":
main_control_loop()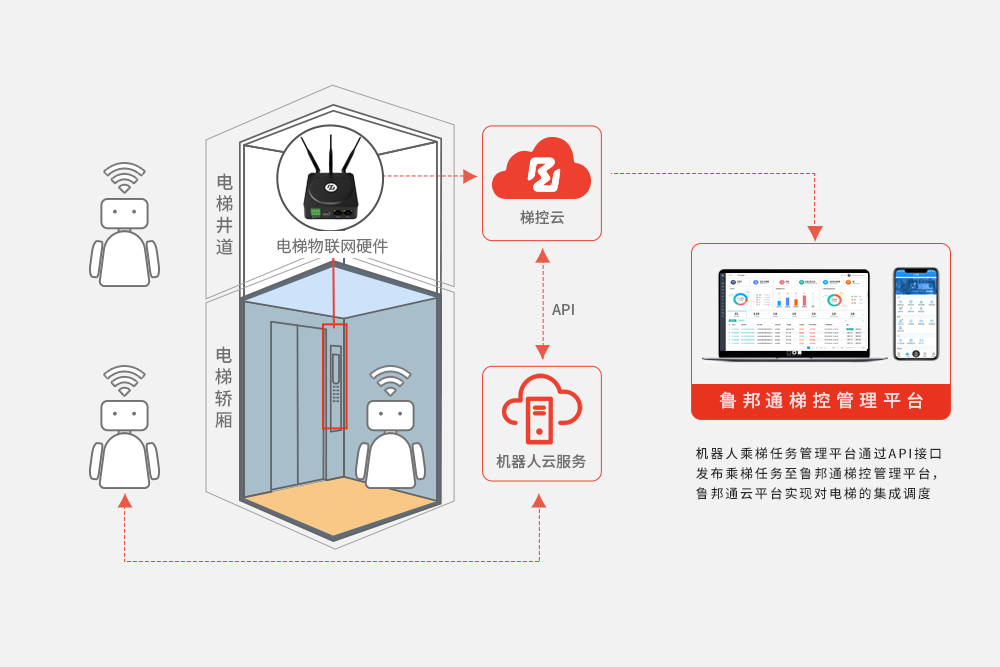
常见问题解答 (FAQ)
问题 1、软件防抖和硬件电路防抖是否重复?
回答 1、不重复。硬件电路能够滤除高频微秒级的毛刺,而软件防抖主要用于处理几十毫秒级的机械触点抖动。两者结合能保障读数的准确性。
问题 2、硬件看门狗重启会导致业务数据丢失吗?
回答 2、在工业级设计中,关键的状态数据应实时写入非易失性存储器。看门狗重启后,初始化程序会首先读取这些状态以恢复断点,保障业务的连续性。
问题 3、在宽压输入设计中,为什么不用普通的线性稳压器?
回答 3、工业现场电压波动大。开关电源相比线性稳压器,能够在极宽的输入电压范围内保持高转换效率和低发热,更适合无风扇的工业环境。
总结: 跨越运行宕机陷阱的关键在于采用高标准的物理防护。通过部署符合工业级规范的硬件底座,能够帮助实施团队在复杂的电气环境下,构筑起稳固的 机器人梯控 数据底座。