本文所述的仿真程序实现: RFID室内动态目标定位系统 ,通过对比加权非线性最小二乘法(WNLS)与扩展卡尔曼滤波(EKF)两种算法,评估其在动态场景下的定位精度与轨迹跟踪能力。
原创代码,禁止翻卖。包运行成功,可以联系我获取代码定制、讲解
文章目录
程序详解
背景与问题
在室内定位领域,RFID系统利用各锚点(读写器天线)接收到的信号强度(RSSI)反推目标距离,再通过多边定位估计目标坐标。然而,RSSI信号受多径效应、环境噪声干扰严重,且对于运动目标,仅凭单帧独立定位往往产生较大的随机跳动误差。本程序正是为了解决这一问题而设计的对比实验框架。
系统组成
- 信道与噪声模型
程序内置两种路径损耗模型,可通过model_type参数切换:
| 模型类型 | 适用场景 | 路径损耗系数 |
|---|---|---|
passive_uhf |
被动UHF RFID(双程传播) | 20 n 20n 20n |
active |
主动RFID / 无线节点(单程) | 10 n 10n 10n |
RSSI观测量由对数距离模型叠加高斯白噪声生成:
RSSI i = RSSI 0 − PathCoeff ⋅ log 10 ( d i d 0 ) + N ( 0 , σ 2 ) \text{RSSI}_i = \text{RSSI}0 - \text{PathCoeff} \cdot \log{10}\!\left(\frac{d_i}{d_0}\right) + \mathcal{N}(0,\,\sigma^2) RSSIi=RSSI0−PathCoeff⋅log10(d0di)+N(0,σ2)
-
感知区域与锚点布局
仿真在 8 m × 7 m 8\text{m} \times 7\text{m} 8m×7m 的矩形感知区域内部署 6个锚点,兼顾四角覆盖与中轴加密,以改善区域中部的几何精度(GDOP)。
-
真实轨迹设计
目标运动轨迹设计为穿越整个感知区域的 S形曲线 ,兼具线性推进(x方向)与双峰正弦波动(y方向),用于充分测试算法在加速、减速和变向条件下的表现:
x ( t ) = 1.0 + 6.5 τ , y ( t ) = 3.5 + 2.8 sin ( 2 π τ ) + 0.6 sin ( 4 π τ ) x(t) = 1.0 + 6.5\tau, \quad y(t) = 3.5 + 2.8\sin(2\pi\tau) + 0.6\sin(4\pi\tau) x(t)=1.0+6.5τ,y(t)=3.5+2.8sin(2πτ)+0.6sin(4πτ)
两种定位算法
-
WNLS --- 加权非线性最小二乘
每帧独立求解定位问题,不依赖任何运动先验。以距离估计的方差倒数为权重,先用线性化方程组给出初值,再经最多60次迭代梯度下降收敛至精确解。其优点是实现简单、无需状态维护,缺点是噪声帧间无法平滑,轨迹抖动明显。
-
EKF --- 扩展卡尔曼滤波
将状态扩展为四维向量 X = x , y , v x , v y ⊤ \mathbf{X} = x,\\, y,\\, v_x,\\, v_y^\top X=x,y,vx,vy⊤,采用匀速运动(CV)过程模型进行预测,再以RSSI观测量对状态进行非线性更新,雅可比矩阵由解析式精确计算。EKF利用目标运动的时序连续性,在噪声较大时通过递归融合历史信息,显著抑制轨迹抖动。
输出内容
程序运行后将输出四组图形与一份统计报告:
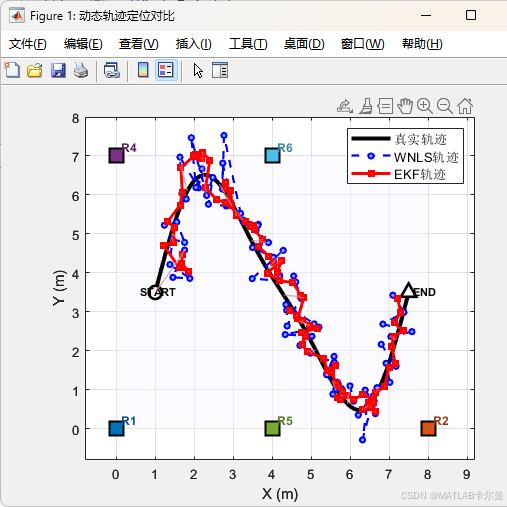
- 轨迹对比主图 --- 真实轨迹 / WNLS轨迹 / EKF轨迹三线叠加,并附误差连线辅助直观感知偏差
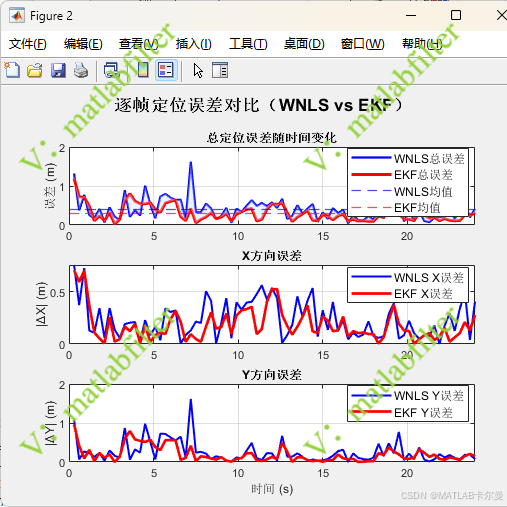
- 逐帧误差曲线 --- 总误差、X分量误差、Y分量误差随时间的变化对比
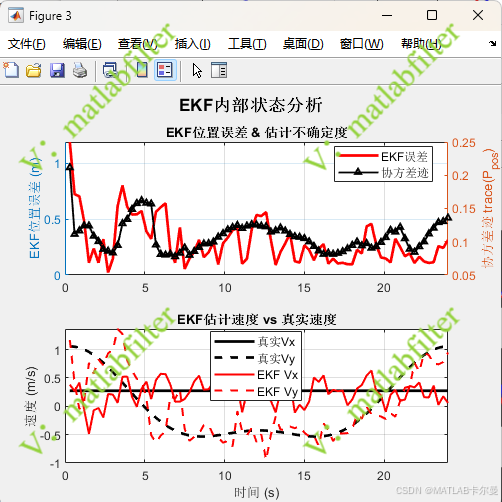
- EKF内部状态分析 --- 位置误差与估计协方差迹的双轴图、估计速度与真实速度的对比
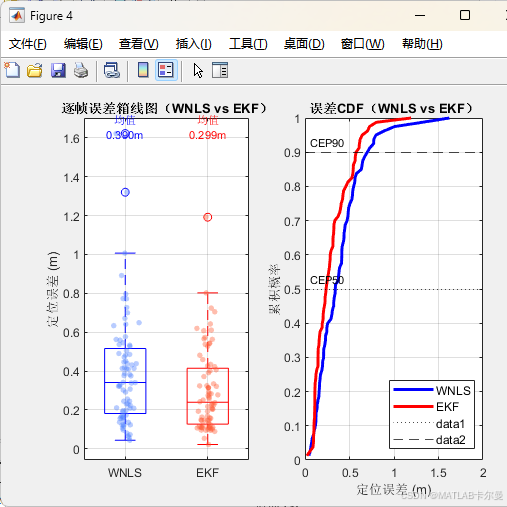
- 统计箱线图 + 误差CDF --- 从分布角度全面评价两种算法的精度与稳定性
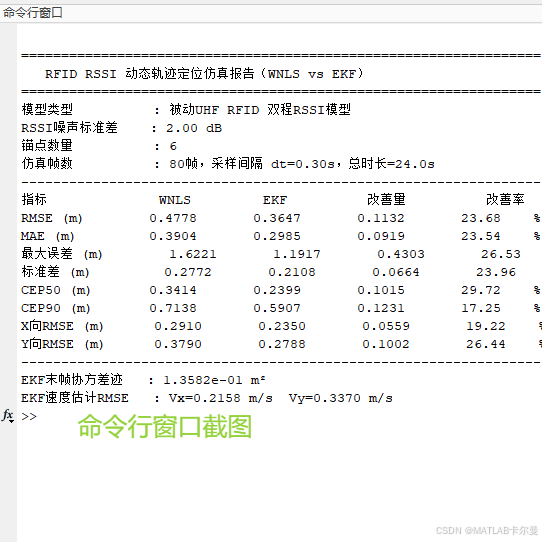
命令行汇总了 RMSE、MAE、最大误差、标准差、CEP50/CEP90、X/Y向分量误差以及EKF速度估计误差等核心指标,并自动计算EKF相对WNLS的改善率
运行结果
动态轨迹对比曲线:
误差曲线(带对比):
EKF结果对比:
EKF前后误差对比箱线图图CDF图像对比(CDF越靠近左上角表示误差整体越低):
命令行窗口输出的结果:
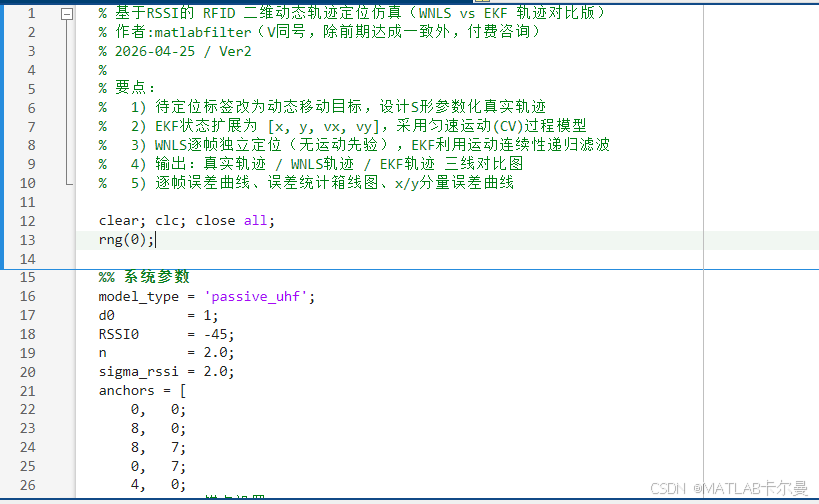
MATLAB源代码
部分代码如下:
演示视频:
基于RSSI的RFID二维轨迹定位仿真介绍,EKF滤波增加轨
完整代码:
https://download.csdn.net/download/callmeup/92829752
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者