【感知·单目测距】单目摄像头测距原理与前向碰撞预警(FCWS)实现
你好!这篇文章我想和你聊聊单目摄像头测距这个挺有意思的技术,以及如何用它来做前向碰撞预警(FCWS)。这是我在做ADAS项目时踩了不少坑才搞明白的,希望能帮到你。
一、单目测距是什么原理?
首先,单目测距,顾名思义,就是只用一个摄像头来估计目标距离。听起来很神奇,其实原理很简单------相似三角形!
1.1 相似三角形原理
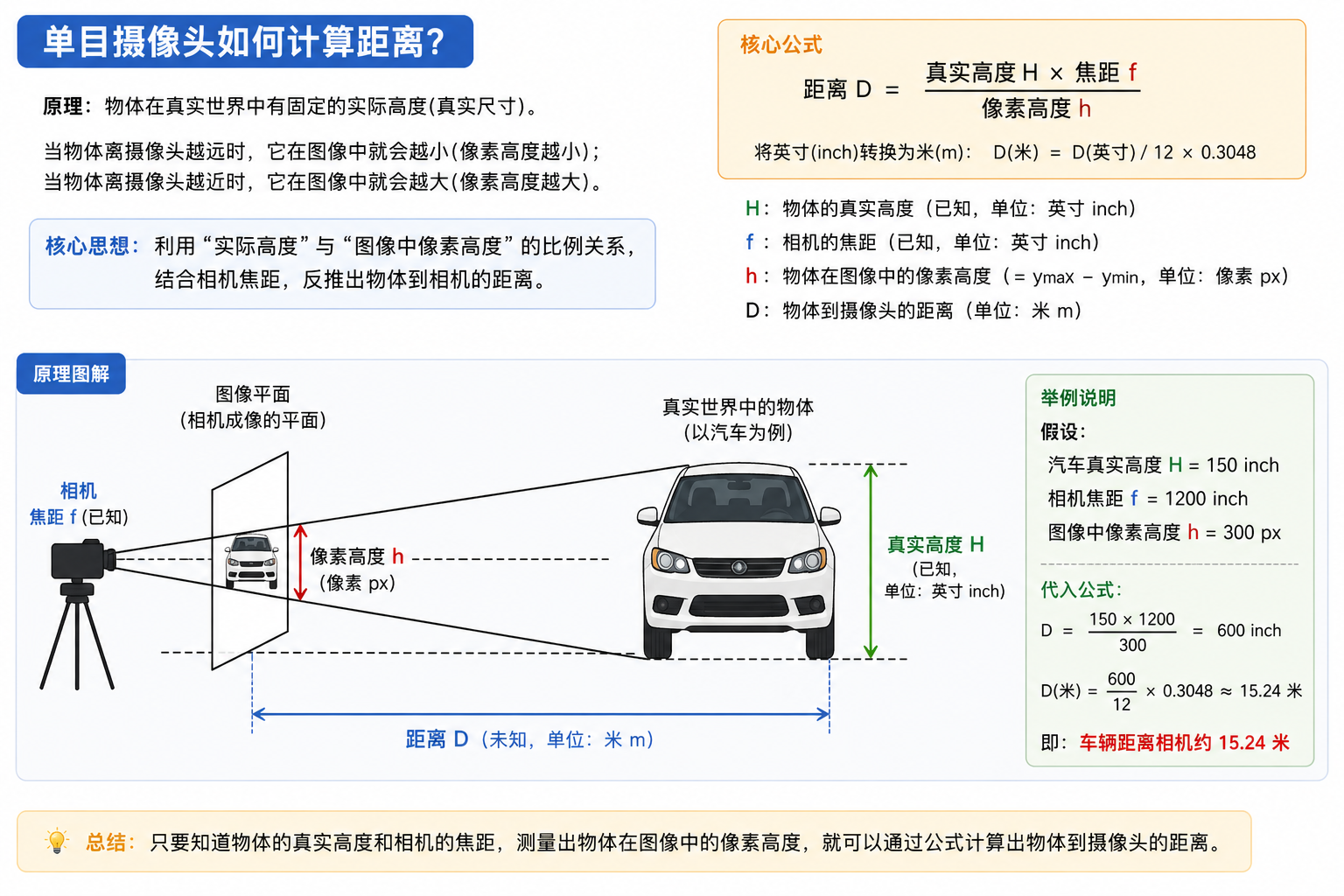
就是这么简单!不过真正用起来还有不少细节要注意。实际上,车辆抖动和相机内参都需要保证绝对稳定,才有单目测距的可用性。
二、代码实现
2.1 距离计算核心代码
这是我项目里的测距实现,你可以看看:
python
class SingleCamDistanceMeasure(object):
# 定义各种目标的真实尺寸(单位:英寸)
scale = 3.5
INCH = 0.39 * scale
RefSizeDict = {
"person": (160 * INCH, 50 * INCH), # 人
"bicycle": (98 * INCH, 65 * INCH), # 自行车
"motorbike": (100 * INCH, 100 * INCH), # 摩托车
"car": (150 * INCH, 180 * INCH), # 小轿车
"bus": (319 * INCH, 250 * INCH), # 公交车
"truck": (346 * INCH, 250 * INCH), # 卡车
}
def __init__(self, object_list=None):
if object_list is None:
object_list = ["person", "bicycle", "car", "motorbike", "bus", "truck"]
self.object_list = object_list
self.f = 1000 # 焦距,这个需要自己调!
self.distance_points = []
def updateDistance(self, boxes):
"""根据检测到的目标框计算距离"""
self.distance_points = []
for box in boxes:
xmin, ymin, xmax, ymax = box.tolist()
label = box.label
if label in self.object_list:
point_x = (xmax + xmin) // 2
point_y = ymax
try:
# 核心公式!
distance = (self.RefSizeDict[label][0] * self.f) / (ymax - ymin)
distance = distance / 12 * 0.3048 # 英尺转米
self.distance_points.append([point_x, point_y, distance])
except:
pass2.2 关键点解释
- 真实尺寸字典:我给每种目标都定义了真实高度,这个很重要,需要先验测量物体的尺寸!
- 焦距 f:这个是需要自己调试的参数,我是用1000,你可能要根据自己的摄像头调
- 单位转换:最后把英寸转成米,方便理解
三、判断目标是否在本车道
光算出距离还不够,还得判断这个目标是不是在我们车道里,不然旁边车道的车我们也预警就太吵了。
3.1 代码实现
python
def calcCollisionPoint(self, poly):
"""
判断目标是否在车道区域内
poly: 车道区域的多边形点
"""
if len(self.distance_points) == 0 or len(poly) == 0:
return None
# 按距离排序,只关心最近的
sorted_distance_points = sorted(self.distance_points, key=lambda arr: arr[2])
for x, y, d in sorted_distance_points:
# 用OpenCV的pointPolygonTest判断点是否在多边形内
status = cv2.pointPolygonTest(poly, (x, y), False) >= 0
if status:
return [x, y, d] # 返回最近的在车道内的目标
return None这里用了 cv2.pointPolygonTest,这个函数太好用了,一行代码就解决问题!
四、前向碰撞预警(FCWS)
现在有了距离,接下来就是判断什么时候该预警了。
4.1 预警等级
我定义了三个等级:
| 等级 | 说明 | 距离范围 |
|---|---|---|
| NORMAL | 正常 | > 10米 |
| PROMPT | 提醒注意 | 5-10米 |
| WARNING | 危险预警 | < 5米 |
4.2 状态平滑处理
直接用单帧的距离容易抖动厉害,我加了个滑动窗口,用中位数滤波,这样更稳:
python
class LimitedList(list):
"""有限长度的列表,自动滑窗"""
def __init__(self, maxlen):
super().__init__()
self._maxlen = maxlen
self._is_full = False
def append(self, element):
if len(self) >= self._maxlen:
self.pop(0)
super().append(element)
self._is_full = len(self) >= self._maxlen
def full(self):
return self._is_full4.3 预警判断代码
python
class TaskConditions(object):
def __init__(self):
self.collision_msg = CollisionType.UNKNOWN
self.vehicle_collision_record = LimitedList(5) # 存最近5帧
def UpdateCollisionStatus(self, vehicle_distance, lane_area, distance_thres=5):
"""
更新碰撞预警状态
"""
if vehicle_distance is not None:
x, y, d = vehicle_distance
self.vehicle_collision_record.append(d)
if self.vehicle_collision_record.full():
# 用中位数,比平均值稳
avg_vehicle_collision = np.median(self.vehicle_collision_record)
if avg_vehicle_collision <= distance_thres:
self.collision_msg = CollisionType.WARNING
elif distance_thres < avg_vehicle_collision <= 2 * distance_thres:
self.collision_msg = CollisionType.PROMPT
else:
self.collision_msg = CollisionType.NORMAL
else:
if lane_area:
self.collision_msg = CollisionType.NORMAL
else:
self.collision_msg = CollisionType.UNKNOWN
self.vehicle_collision_record.clear()五、实际使用中的经验
做这个的时候我踩了不少坑,给你分享几个我摸索出来的经验:
5.1 焦距怎么调?
这个焦距 f 是最关键的参数,我的方法是:
- 找一辆车,停在离你知道距离的地方(比如10米)
- 看代码算出的距离是多少
- 按比例调整
f,直到算出的距离和真实距离差不多 - 多试几个距离,取个平均值
5.2 为什么用中位数不用平均值?
因为:
- 中位数对异常值不敏感
- 比如偶尔一帧检测错了,不会影响太大
- 更稳定,不会乱跳
5.3 滑窗大小设多少合适?
我试了5帧,感觉刚好:
- 太少:太灵敏,容易误报
- 太多:反应迟钝,预警不及时
- 5帧:30fps的话就是0.17秒延迟,完全可以接受
5.4 预警阈值怎么设?
这个要看车速:
- 市区开得慢:阈值可以设小一点(30米)
- 高速开得快:阈值要设大一点(100米)
- 可以做成动态的,根据车速调整
六、整合到主程序
这是完整的主流程:
python
# 初始化
objectDetector = EfficientdetDetector(...) # 车辆检测
distanceDetector = SingleCamDistanceMeasure() # 测距
laneDetector = UltrafastLaneDetectorV2(...) # 车道检测
analyzeMsg = TaskConditions() # 状态分析
while cap.isOpened():
ret, frame = cap.read()
if ret:
# 1. 检测车辆
objectDetector.DetectFrame(frame)
# 2. 检测车道线
laneDetector.DetectFrame(frame)
# 3. 计算距离
distanceDetector.updateDistance(objectDetector.object_info)
# 4. 找出本车道内最近的车
vehicle_distance = distanceDetector.calcCollisionPoint(laneDetector.lane_info.area_points)
# 5. 判断预警
analyzeMsg.UpdateCollisionStatus(vehicle_distance, laneDetector.lane_info.area_status, distance_thres=3)
# 6. 显示结果
displayPanel.DisplayCollisionPanel(frame, analyzeMsg.collision_msg, ...)七、效果展示

- 绿色图标:正常
- 橙色图标:提醒
- 红色图标:预警
八、可以改进的地方
如果你想改进这个项目,可以试试:
- 动态阈值:根据车速自动调整预警距离
- 多目标跟踪:用ByteTrack跟踪,测距更稳定
- 夜间优化:夜间检测效果差点,可以加个夜间判断
- 更多目标类型:比如摩托车、电动车
- TensorRT加速:让检测更快
九、总结
单目测距虽然原理简单,但要做好还是挺多细节的。希望这篇文章能帮你少走点弯路。如果你有什么好想法或者问题,欢迎一起交流!
*这个项目还有车道偏离预警(LDWS)和车道保持辅助(LKAS),有兴趣可以点个关注,催更有效哦~
祝你做项目顺利!