
🎬 渡水无言 :个人主页渡水无言
❄专栏传送门 : 《linux专栏》《嵌入式linux驱动开发》《linux系统移植专栏》
❄专栏传送门 : 《freertos专栏》 《STM32 HAL库专栏》《linux裸机开发专栏》
❄专栏传送门 :《产品测评专栏》
⭐️流水不争先,争的是滔滔不绝
📚博主简介:第二十届中国研究生电子设计竞赛全国二等奖 |国家奖学金 | 省级三好学生
| 省级优秀毕业生获得者 | csdn新星杯TOP18 | 半导纵横专栏博主 | 211在读研究生
在这里主要分享自己学习的linux嵌入式领域知识;有分享错误或者不足的地方欢迎大佬指导,也欢迎各位大佬互相三连

目录
[二、PID 控制简介](#二、PID 控制简介)
[三、PID 代码实现](#三、PID 代码实现)
前言
在上一节中,我们完成了控制任务的两级模式设计与任务通知交互,实现了从 "指令触发" 到 "闭环运行" 的平滑切换。在每个10ms的控制周期内,真正让底盘动起来的,是运动学逆解、PID 控制与 PWM 输出这三个关键环节。
这三者构成了控制闭环的核心:运动学逆解负责 "算目标",PID 控制负责 "追目标",硬件驱动负责 "执行目标",三者分工明确、解耦清晰,即使后续更换底盘结构或驱动方案,也只需修改对应模块,不影响整体控制框架。
一、运动学逆解
本项目的底盘采用两轮差速驱动结构,左右两侧各有一个独立驱动轮,通过控制左右轮的转速不同,实现前进、后退以及转向等运动形式。
上位控制模块(如导航或遥控模块)并不会直接给出左右轮的速度,而是以更直观的方式给出机器人 X 轴速度、Y 轴速度和角速度。因此,在进入电机控制之前,需要通过运动学逆解,将整体运动指令转换为左右轮各自的目标速度。
在本系统中,上层给出的运动指令包含两个量(差速模型,没有 Y 轴速度):
线速度 vx_mmps:表示机器人沿自身前进方向的速度,单位为毫米每秒(mm/s);
角速度 wz_mradps:表示机器人绕自身中心垂直轴旋转的角速度,单位为毫弧度每秒(mrad/s)。
差速底盘的运动学模型基于一个直观的物理关系:
当机器人直线行驶时,左右轮速度相等;
当机器人发生转向时,外侧轮速度更快,内侧轮速度更慢,二者之间的速度差由角速度和轮距共同决定。
在理想情况下,在代码实现中,首先将角速度从毫弧度每秒转换为弧度每秒,这是因为后续计算采用的是国际单位制。随后根据底盘的轮距参数 WHEEL_BASE_MM 计算半轮距 half_base,并利用如下关系得到左右轮目标速度:
左轮目标速度 = 线速度 − 角速度 × 半轮距。
右轮目标速度 = 线速度 + 角速度 × 半轮距。
cpp
/* ==================================================
* 差速逆解 (单位: mm/s, mrad/s)
* 输入:
* vx_mmps : 线速度 mm/s
* wz_mradps: 角速度 mrad/s
* 输出:
* vL_mmps/vR_mmps: 左右轮目标线速度 mm/s
* ================================================== */
static void diff_inverse_kinematics_mmps_mradps(int16_t vx_mmps, int16_t wz_mradps, float* vL, float* vR)
{
// 将角速度从 mrad/s 转换为 rad/s
float wz_rad = (float)wz_mradps / 1000.0f;
// 计算底盘半轮距
float half_base = WHEEL_BASE_MM * 0.5f;
// 计算左右轮目标速度
float vL_val = (float)vx_mmps - wz_rad * half_base;
float vR_val = (float)vx_mmps + wz_rad * half_base;
// 限制轮速在最大范围内,防止超出电机性能
vL_val = clampf(vL_val, -MAX_WHEEL_SPEED_MMPS, MAX_WHEEL_SPEED_MMPS);
vR_val = clampf(vR_val, -MAX_WHEEL_SPEED_MMPS, MAX_WHEEL_SPEED_MMPS);
*vL = vL_val;
*vR = vR_val;
}说明:运动学逆解过程只涉及几何关系和速度分配,不关心电机如何实现这些速度,也不涉及 PID 控制、电流控制或 PWM 输出等细节。后续如果底盘结构或参数发生变化(例如轮距改变),只需修改运动学相关参数即可,不影响整体控制框架。
二、PID 控制简介
在差速底盘控制中,运动学逆解只能计算出左右轮的期望速度,而电机本身并不能直接接收 "速度" 这一抽象指令。电机真正能接收和执行的,是 PWM(脉宽调制)信号。因此,必须通过一套控制算法,将 "目标速度" 转换为 "合适的 PWM 输出",并在执行过程中不断修正偏差,保证实际速度尽可能贴近目标速度。本项目中,这一任务由PID 控制器 + PWM 输出机制共同完成。
PID 控制器的组成与含义
PID 控制器由比例(P)、积分(I)和微分(D)三部分组成,本项目中每个轮子各自使用一个独立的 PID 控制器,互不干扰。
**比例项(P):**反映当前误差的大小。当目标速度与测量速度之间存在偏差时,比例项会立即产生一个与误差成正比的输出,误差越大,输出修正越强。比例项的作用是快速响应。
局限: 但单独使用比例控制往往会留下稳态误差。
**积分项(I):**用于累计历史误差。当系统长期存在小误差时,积分项会逐步累加并放大其影响,推动输出继续调整,直到误差被消除。积分项的引入可以有效消除稳态误差。
局限: 但如果不加限制,容易产生 "积分饱和" 问题,导致系统响应变慢甚至振荡,因此代码中通过i_limit对积分项进行限制。
**微分项(D):**用于反映误差变化的趋势,即误差是 "在变大还是变小"。它相当于对未来的预测,可以在误差变化过快时提前抑制输出,减少震荡和超调。当前代码中微分系数暂设为 0,便于调试和稳定系统,后续可按需开启。
PID 计算
cpp
利用公式 Output=Kp×err+Ki×err_acc+Kd×err_dot 计算出 PWM 修正量err:误差。
err_acc:误差累积。
err_dot:误差变化率。
综合来看,PID 的输出是三项之和:比例负责 "快",积分负责 "准",微分负责 "稳"。
三、PID 代码实现
cpp
/* ==================================================
* PID控制器初始化
* ================================================== */
static void PID_Init(PID_t* pid, float kp, float ki, float kd, float i_limit, float out_limit)
{
pid->kp = kp;
pid->ki = ki;
pid->kd = kd;
pid->i_acc = 0.0f;
pid->prev_err = 0.0f;
pid->i_limit = i_limit;
pid->out_limit = out_limit;
}
/* ==================================================
* PID更新计算
* 公式: Output = Kp*err + Ki*err_acc + Kd*(err-prev_err)/dt
* ================================================== */
static int16_t PID_Update(PID_t* pid, float ref, float meas, float dt)
{
// 计算误差
float err = ref - meas;
// 比例项
float p_out = pid->kp * err;
// 积分项(带限幅):误差累积 * Ki
pid->i_acc += pid->ki * err * dt;
pid->i_acc = clampf(pid->i_acc, -pid->i_limit, pid->i_limit);
// 微分项(可选):误差变化率 * Kd
float d_out = 0.0f;
if (pid->kd != 0.0f && dt > 0.0f) {
d_out = pid->kd * (err - pid->prev_err) / dt;
}
pid->prev_err = err;
// 总输出 + 限幅
float out = p_out + pid->i_acc + d_out;
out = clampf(out, -pid->out_limit, pid->out_limit);
// 转换为int16_t PWM值
return clampi16((int16_t)lroundf(out), PWM_MIN, PWM_MAX);
}四、PWM输出
PWM(Pulse Width Modulation,脉宽调制)本质上是一种用开关模拟连续调节的方法。它输出的不是平滑的模拟电压,而是周期性的高低电平信号,电机因惯性和电感的特性,最终表现出的是一个平均效果。
PWM 最重要的两个概念:
频率(Frequency): 表示 PWM 高低电平重复的速度,如 20kHz 表示 1 秒重复 20000 次。
**占空比(Duty Cycle):**决定高电平占一个周期的比例,占空比越大,平均电压越高,电机转速越快。
具体的PWM介绍可以参考此篇博客:
STM32定时器进阶:输出比较与PWM信号生成,从原理到实例一篇就够---STM32 HAL库专栏_stm32 锯齿波与比较器 pwm-CSDN博客
本项目中,电机执行器模块负责将控制模块的 "逻辑 PWM 指令" 转换为真实硬件可执行的控制信号,并提供轮速反馈能力,对外提供 4 个核心接口:
Motor_Init():初始化电机执行器,包括启动 PWM 输出、初始化方向控制,并将输出清零(停机)。
Motor_ApplyPwm(pwmL, pwmR):接收左右轮的逻辑 PWM 指令(范围 - 1000~1000),完成限幅、方向控制和 PWM 输出,是电机真正 "执行动作" 的入口。
MotorSim_Tick(pwmL, pwmR, dt_s):用于仿真轮速反馈,根据 PWM 指令模拟电机动态响应,生成测量速度。
Motor_GetWheelSpeedMmps(vL, vR):返回当前测得的左右轮速度(单位 mm/s),当前版本默认来自仿真模型,后续可替换为真实编码器测量值。
电机方向控制
电机方向控制采用典型的两线制驱动方式,对应 TB6612、L298 等常用电机驱动方案,本项目映射关系如下:
左轮:PB4 = IN1,PB5 = IN2
右轮:PB6 = IN1,PB7 = IN2
方向逻辑由motor_apply_dir_2pin()完成:
cpp
pwm > 0:正转,IN1=1, IN2=0
pwm < 0:反转,IN1=0, IN2=1
pwm = 0:停机五、整体控制流程
在每一个控制周期内,系统会按如下顺序完成 PID 与 PWM 控制流程,如下图所示:
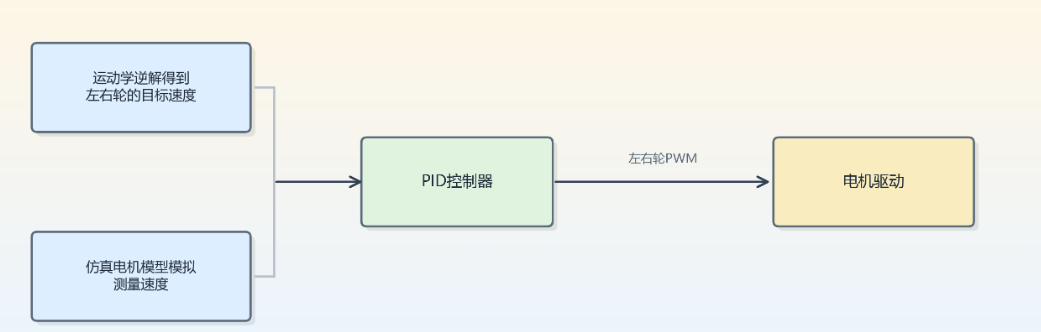
这一过程不断重复,形成稳定的速度闭环控制。
总结
本文完整实现了机器人底盘控制的核心执行闭环 :通过运动学逆解 将上层速度指令转换为左右轮目标轮速,通过PID 控制器 实现精准的速度闭环调节,再通过PWM 输出驱动电机完成最终执行。