在 Python 编程的世界里,掌握多样化的编程技巧和库的使用方法,是提升开发效率、实现复杂功能的关键。本文将从实际应用场景出发,拆解四个实用的 Python 代码案例,分别讲解多线程编程、基于 OpenCV 的颜色识别、正则表达式的字符串筛选,以及装饰器实现 "三进一" 触发逻辑的核心思路与实操细节,帮助开发者将这些技巧落地到实际项目中。
一、多线程编程:让程序 "并行" 处理任务
在 Python 中,threading库是实现多线程编程的核心工具,它允许程序在同一时间处理多个任务,尤其适合 I/O 密集型场景(如网络请求、文件读写、定时任务等),能有效提升程序的执行效率。
1. 基础线程创建与执行
首先看最基础的线程实现示例:
python
import threading
import time
def worker():
print('线程开始执行')
for i in range(5):
print(f'线程正在工作: {i}')
print('线程执行完毕')
# 创建线程对象,指定目标函数
thread = threading.Thread(target=worker)
# 启动线程
thread.start()
print('****主线程继续执行****')这段代码中,我们首先定义了worker函数作为线程的执行体,然后通过threading.Thread()创建线程对象,target参数指定线程要执行的函数。调用start()方法后,线程开始独立运行,而主线程不会等待子线程完成,会直接执行后续的print语句。因此运行结果会看到 "主线程继续执行" 与子线程的输出交替出现,这体现了线程的异步特性。
2. 带参数的多线程
实际开发中,线程执行的函数往往需要接收参数,我们可以通过args参数为线程函数传参:
python
def worker(name):
print(f'{name} 线程开始执行')
for i in range(5):
print(f'{name} 正在工作: {i}')
time.sleep(0.5) # 模拟耗时操作
print(f'{name} 线程执行完毕')
# 创建两个线程,分别传入不同参数
thread1 = threading.Thread(target=worker, args=('线程1',))
thread2 = threading.Thread(target=worker, args=('线程2',))
thread1.start()
thread2.start()
print('****主线继续执行****')这里创建了两个线程thread1和thread2,分别给worker函数传入 "线程 1" 和 "线程 2" 作为名称。time.sleep(0.5)模拟了耗时的业务逻辑,运行后会看到两个线程交替输出工作信息,主线程依然优先执行后续语句。这一特性在处理多个独立的定时任务时尤为实用,比如同时监控多个设备的状态、并行处理多个文件的解析等。
3. 不同延时的线程调度
我们再看一个更贴近实际的定时线程示例:
python
def run(t):
time.sleep(t)
print(f'我等了{t}秒')
t1 = threading.Thread(target=run, args=(3,))
t2 = threading.Thread(target=run, args=(6,))
t1.start()
print('开始计时')
t2.start()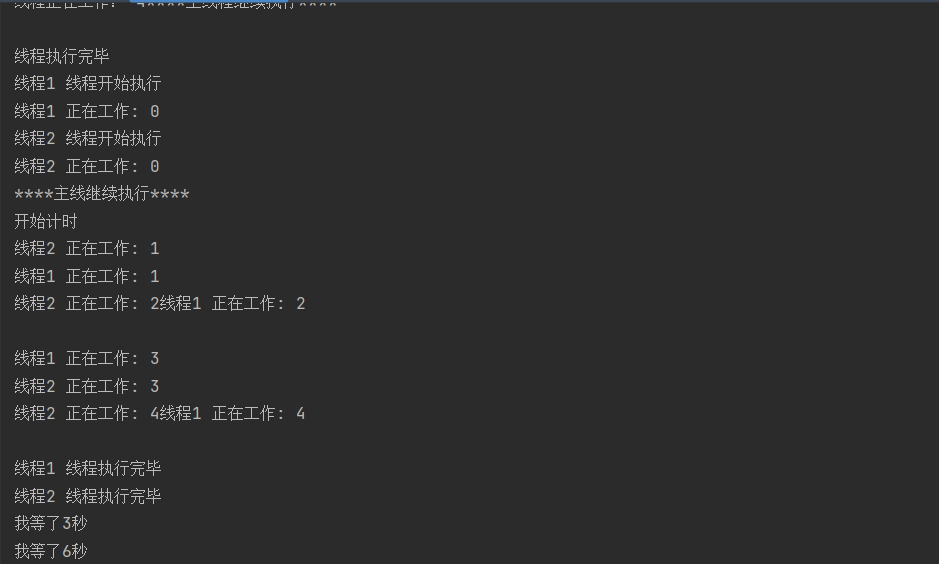
t1线程等待 3 秒后输出,t2线程等待 6 秒后输出,主线程启动t1后立即打印 "开始计时",再启动t2。运行结果会先看到 "开始计时",3 秒后t1输出内容,再过 3 秒t2输出内容。这种方式可以实现多任务的定时调度,比如在爬虫项目中,同时设置不同时间间隔的请求任务,避免单线程等待导致的效率低下。
多线程使用注意事项
需要注意的是,Python 的多线程受 GIL(全局解释器锁)限制,在 CPU 密集型场景下无法真正实现多核并行,此时更适合使用multiprocessing库实现多进程。但在 I/O 密集型场景中,threading库依然是轻量且高效的选择,开发者需根据业务场景合理选择。
二、基于 OpenCV 的颜色识别:检测特定物体(牛皮纸箱)
OpenCV 是 Python 视觉处理的核心库,结合 NumPy 的数值计算能力,我们可以轻松实现图像的颜色筛选与物体检测。以下案例通过识别图像中的棕色区域,判断是否存在牛皮纸箱,可应用于物流分拣、视觉监控等场景。
1. 核心原理:HSV 颜色空间筛选
RGB 颜色空间(红、绿、蓝)受光线影响较大,而 HSV 颜色空间(色相、饱和度、明度)更适合颜色筛选。我们首先将摄像头采集的图像从 BGR(OpenCV 默认格式)转换为 HSV,再定义棕色的 HSV 范围,通过掩码(mask)筛选出棕色区域。
2. 完整实现代码
python
import cv2
import numpy as np
# 打开摄像头(0表示默认摄像头)
cap = cv2.VideoCapture(0)
while True:
try:
# 读取摄像头帧
ret, frame3 = cap.read()
# 转换为HSV颜色空间
hsv_image = cv2.cvtColor(frame3, cv2.COLOR_BGR2HSV)
# 定义棕色的HSV范围(可根据实际场景调整)
lower_brown = np.array([10, 30, 30])
upper_brown = np.array([30, 255, 255])
# 生成掩码:筛选出在指定颜色范围内的像素(255为匹配,0为不匹配)
mask = cv2.inRange(hsv_image, lower_brown, upper_brown)
# 显示掩码图像
cv2.imshow('mask', mask)
# 计算棕色区域占比
white_pixels = np.sum(mask == 255) # 匹配的像素数
total_pixels = mask.shape[0] * mask.shape[1] # 总像素数
color_percentage = (white_pixels / total_pixels) * 100
# 当棕色区域占比≥20%时,判定为检测到牛皮纸箱
if color_percentage >= 20:
print('检测到牛皮纸箱')
# 显示原始筛选后的图像
cv2.imshow('Filtered Image1', frame3)
# 按下ESC键退出循环
if cv2.waitKey(1) == 27:
break
except:
pass
# 释放摄像头资源,关闭窗口
cap.release()
cv2.destroyAllWindows()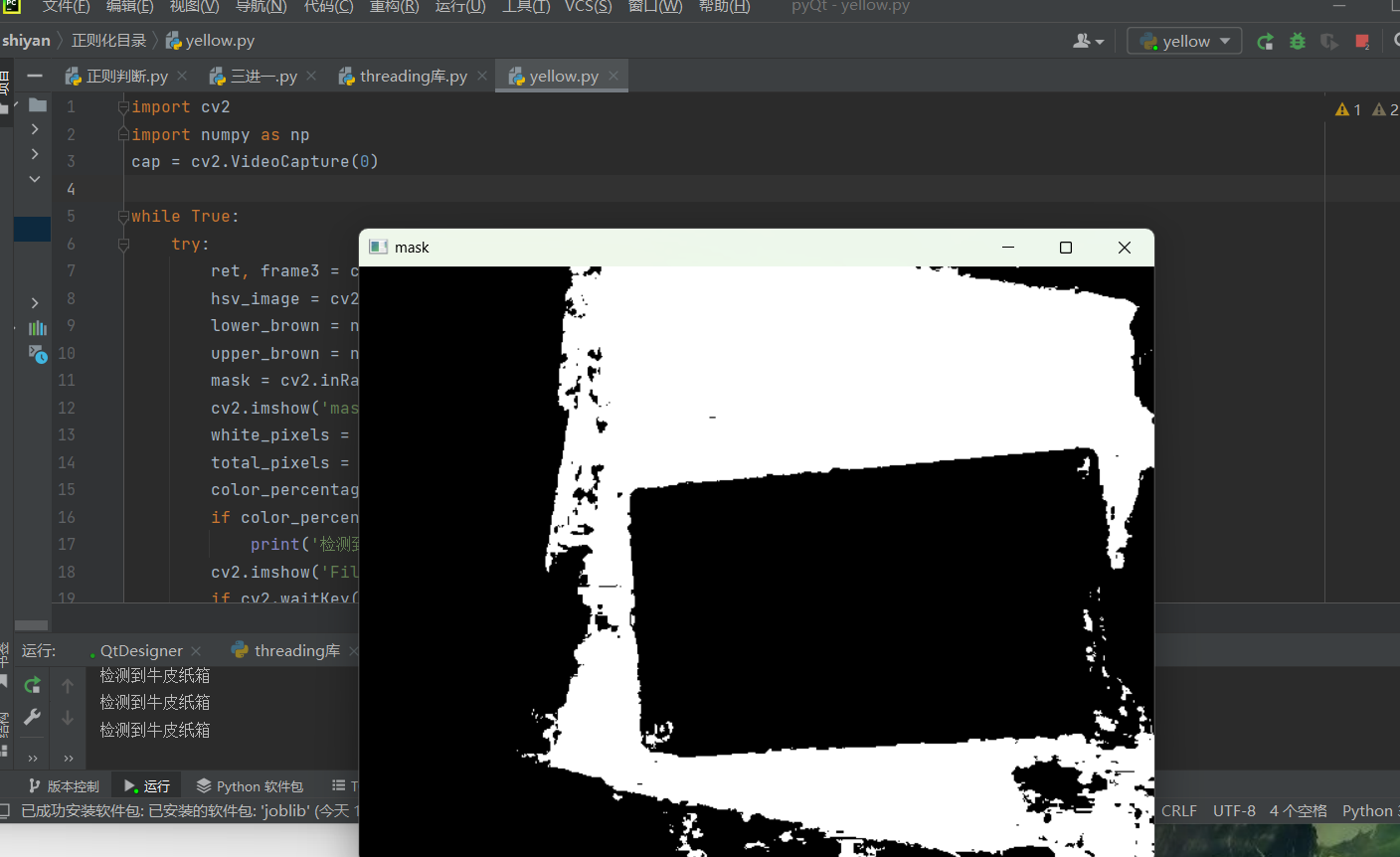
3. 关键细节解析
- 摄像头读取 :
cv2.VideoCapture(0)打开默认摄像头,cap.read()逐帧读取图像,ret表示是否读取成功,frame3为读取到的图像矩阵。 - 颜色空间转换 :
cv2.cvtColor(frame3, cv2.COLOR_BGR2HSV)将 BGR 转换为 HSV,解决 RGB 颜色空间受光线干扰的问题。 - 掩码生成 :
cv2.inRange()根据指定的 HSV 范围生成二值掩码,匹配的像素设为 255(白色),不匹配的设为 0(黑色)。 - 占比计算:通过 NumPy 统计掩码中白色像素的数量,除以总像素数得到颜色占比,以此判断是否存在目标物体。
优化方向
实际应用中,可根据现场光线调整棕色的 HSV 范围;也可增加形态学操作(如腐蚀、膨胀)去除噪声,提升检测准确性;还可以结合轮廓检测,定位牛皮纸箱的具体位置。
三、正则表达式:精准筛选字符串
正则表达式是处理字符串的 "瑞士军刀",通过定义匹配规则,可快速筛选、验证、提取符合要求的字符串。以下案例实现了对混合字符串的精准筛选,适用于数据清洗、关键词提取等场景。
1. 需求分析
我们需要筛选出两类字符串:
- 第一类:包含字母和数字,可包含连字符,长度 2-8 位;
- 第二类:纯数字,长度 4-7 位。
2. 实现代码与解析
python
import re
def process_string(input_string):
aa = []
# 将字符串按空格分割为多个部分
parts = input_string.split()
# 定义第一类匹配规则:至少含字母和数字,可含连字符,长度2-8
pattern_alphanumeric = re.compile(r'^(?=.*[a-zA-Z])(?=.*\d)[a-zA-Z\d-]{2,8}$')
# 定义第二类匹配规则:纯数字,长度4-7
pattern_at_least_two_digits = re.compile(r'^\d{4,7}$')
for part in parts:
# 匹配任一规则则加入结果列表
if pattern_alphanumeric.match(part) or pattern_at_least_two_digits.match(part):
aa.append(part)
return aa
# 测试用例
a = 'Aceite p04476'
b = 'sdighsg'
c = 's4967xl'
d = 'v0-4985'
e = 'v0-4985'
f = '123'
g = '1234568956'
h = '45825'
ylist = []
llist = [a, b, c, d, e, f, g, h]
for i in llist:
ma = process_string(i)
ylist.extend(ma)
print(ylist) # 输出:['p04476', 's4967xl', 'v0-4985', 'v0-4985', '45825']
3. 正则规则拆解
^(?=.*[a-zA-Z])(?=.*\d)[a-zA-Z\d-]{2,8}$:^和$表示匹配字符串的开头和结尾,确保整个字符串符合规则;(?=.*[a-zA-Z]):正向预查,确保字符串包含至少一个字母;(?=.*\d):正向预查,确保字符串包含至少一个数字;[a-zA-Z\d-]{2,8}:匹配字母、数字、连字符,长度 2 到 8 位。
^\d{4,7}$:匹配纯数字,长度 4 到 7 位,\d表示数字,{4,7}限定长度范围。
4. 应用场景
该逻辑可用于:
- 清洗电商订单号、产品编码,筛选符合格式的编码;
- 提取日志中的关键编号,排除无效字符;
- 验证用户输入的验证码、账号是否符合格式要求。
四、装饰器进阶:实现 "三进一" 触发逻辑
Python 装饰器是一种高阶函数,能在不修改原函数代码的前提下,为函数添加额外功能。以下案例实现了 "每调用 3 次目标函数,触发一次指定操作" 的逻辑,可应用于批量操作、定时清理、日志记录等场景。
1. 核心思路
- 定义一个带参数的装饰器
execute_after_n_calls,接收两个参数:触发间隔n(此处为 3)、触发时执行的函数w2set; - 装饰器内部定义
wrapper函数,记录目标函数的调用次数; - 每次调用目标函数后,检查调用次数是否为
n的倍数,若是则执行w2set函数。
2. 完整实现代码
python
import re
def execute_after_n_calls(n, w2set):
# 装饰器接收触发间隔和触发函数
def decorator(func):
def wrapper(*args, **kwargs):
# 初始化调用次数(仅第一次执行时生效)
wrapper.count += 1
# 执行原函数并获取结果
result = func(*args, **kwargs)
# 每调用n次,执行触发函数
if wrapper.count % n == 0:
w2set()
return result
wrapper.count = 0 # 初始化计数器
return wrapper
return decorator
# 触发函数:每3次调用aa后执行
def bb():
print('b')
# 为aa函数添加装饰器,设置每3次调用触发bb
@execute_after_n_calls(3, bb)
def aa():
print('a')
# 测试调用
aa() # 第1次:输出a
aa() # 第2次:输出a
aa() # 第3次:输出a,然后输出b
aa() # 第4次:输出a
aa() # 第5次:输出a
aa() # 第6次:输出a,然后输出b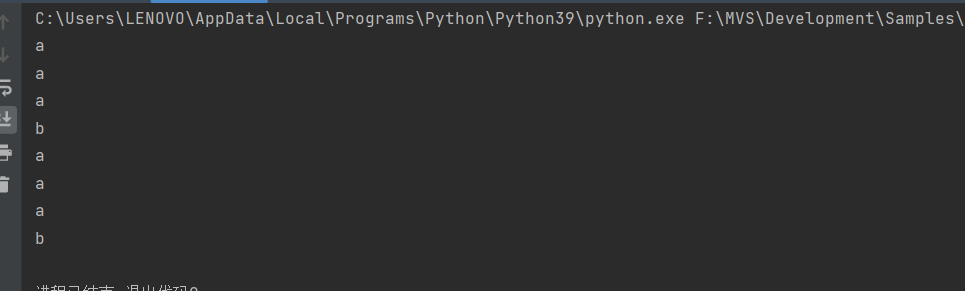
3. 装饰器工作原理
- 带参数的装饰器需要三层嵌套:最外层接收装饰器的参数(
n和w2set),中间层接收被装饰的函数(func),最内层(wrapper)实现具体的增强逻辑。 wrapper.count作为计数器,记录aa函数的调用次数,每次调用aa时,计数器加 1,当计数器是 3 的倍数时,执行bb函数。- 装饰器保留了原函数的返回值,确保增强功能不影响原函数的正常使用。
扩展应用
该逻辑可灵活调整:
- 将触发间隔
n改为 5,实现 "五进一"; - 将触发函数
bb替换为日志写入、数据提交、缓存清理等操作; - 结合参数传递,实现不同函数的个性化触发规则。
五、总结与拓展
本文拆解的四个案例,覆盖了 Python 编程的多个核心方向:
- 多线程编程解决了 "异步执行" 的问题,提升程序处理多任务的效率;
- OpenCV 结合 NumPy 实现了视觉层面的颜色识别,落地到物体检测场景;
- 正则表达式实现了字符串的精准筛选,是数据清洗的必备工具;
- 装饰器则体现了 Python 的 "函数式编程" 思想,实现了代码的解耦与复用。
在实际开发中,这些技巧可以组合使用:比如在多线程爬虫中,用正则表达式解析爬取的字符串,用装饰器记录每爬取 N 页后的状态;在视觉监控项目中,用多线程同时处理摄像头采集和数据上报,用正则表达式解析设备编号。
Python 的魅力在于其丰富的库和灵活的语法,开发者需结合业务场景,将这些基础技巧融会贯通,不断优化代码逻辑,才能写出高效、易维护的程序。同时,建议深入学习每个知识点的底层原理(如 GIL 对多线程的影响、正则表达式的贪婪匹配、装饰器的闭包特性),才能在复杂场景中灵活应对,真正提升编程能力。