从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC)
### 文章目录
- [从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC)](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接
 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写
2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写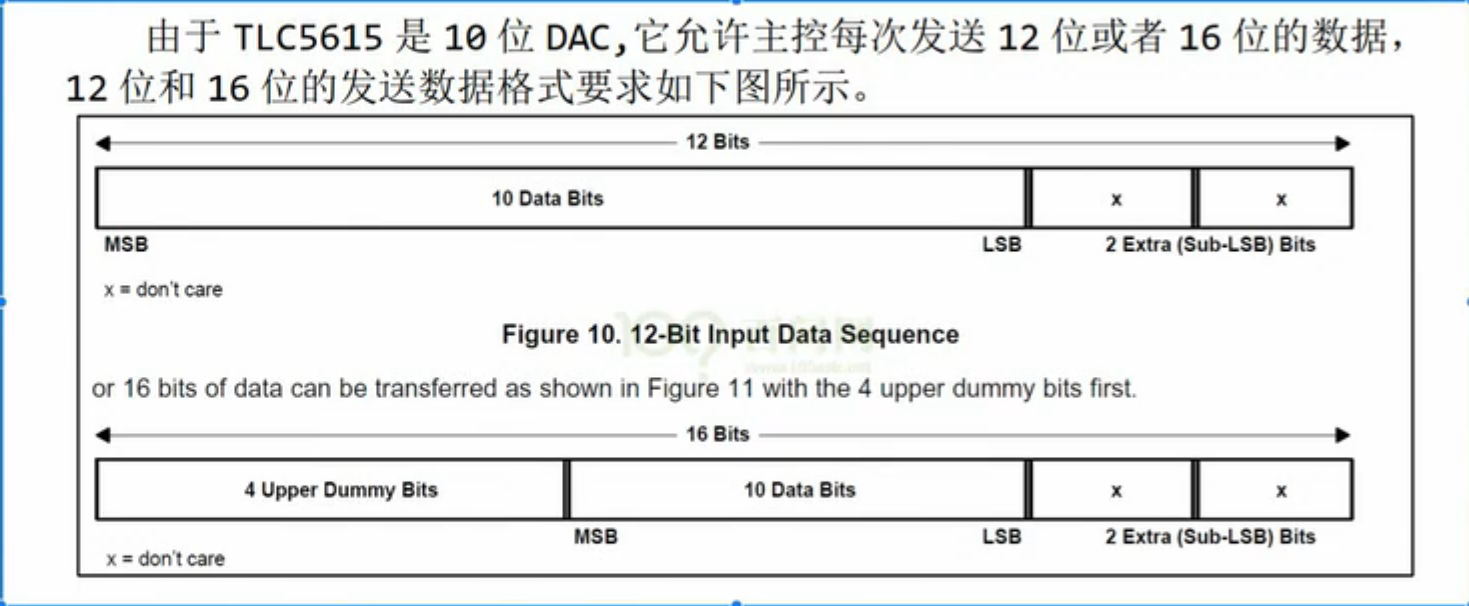 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [@TOC](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [1. 什么是 SPI?硬件信号与连接!在这里插入图片描述(https://i-blog.csdnimg.cn/direct/bb66c86932dd4437ab05ddf4c8a8eedb.png)](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [2. SPI 四种模式(CPOL / CPHA)](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [3. Linux SPI 子系统框架](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [4. 设备树中如何描述 SPI 设备](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [5. 最简单的 SPI 字符设备驱动框架](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [6. 实战:TLC5615 DAC 驱动完整编写!在这里插入图片描述(https://i-blog.csdnimg.cn/direct/55b946b759e74c2baeb038874d3efc9b.png)](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [6.1 TLC5615 芯片及数据格式](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [6.2 完整驱动代码(含注释)](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [6.3 驱动代码关键点解析](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [7. 编译、装载与测试](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [7.1 编译驱动](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [7.2 更新设备树](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [7.3 装载驱动与测试](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [8. 常见问题与内核错误分析](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [8.1 错误:`cannot set clock freq: 2 (base freq: 60000000)`](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [8.2 内核 `paging request` 崩溃](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [9 完整流程框架(以写入数值 200 为例)](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [9.1 用户空间程序 `dac_test` 工作](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [9.2 C 库到系统调用](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [9.3 VFS 层找到对应的字符设备驱动](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [9.4 驱动 `spi_drv_write` 内部执行细节](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [9.5内核 SPI 核心层(`spi_sync_transfer`)](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [9.6SPI 控制器驱动(硬件操作)](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [9.7 回到驱动层及用户空间](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [9.8 硬件端 TLC5615 响应](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [10. 总结与面试自测题](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案)) - [面试自测题(附答案)](#文章目录 从零开始学习 Linux SPI 驱动开发(基于 IMX6ULL + TLC5615 DAC) @[TOC] 1. 什么是 SPI?硬件信号与连接 2. SPI 四种模式(CPOL / CPHA) 3. Linux SPI 子系统框架 4. 设备树中如何描述 SPI 设备 5. 最简单的 SPI 字符设备驱动框架 6. 实战:TLC5615 DAC 驱动完整编写 6.1 TLC5615 芯片及数据格式 6.2 完整驱动代码(含注释) 6.3 驱动代码关键点解析 7. 编译、装载与测试 7.1 编译驱动 7.2 更新设备树 7.3 装载驱动与测试 8. 常见问题与内核错误分析 8.1 错误:
cannot set clock freq: 2 (base freq: 60000000)8.2 内核paging request崩溃 9 完整流程框架(以写入数值 200 为例) 9.1 用户空间程序dac_test工作 9.2 C 库到系统调用 9.3 VFS 层找到对应的字符设备驱动 9.4 驱动spi_drv_write内部执行细节 9.5内核 SPI 核心层(spi_sync_transfer) 9.6SPI 控制器驱动(硬件操作) 9.7 回到驱动层及用户空间 9.8 硬件端 TLC5615 响应 10. 总结与面试自测题 面试自测题(附答案))
1. 什么是 SPI?硬件信号与连接
SPI(Serial Peripheral Interface)是一种全双工、同步串行总线,由摩托罗拉提出。基本信号有 4 根线:
| 信号名 | 方向(相对于主控) | 作用 |
|---|---|---|
| SCK | 主 → 从 | 时钟信号,由主机产生 |
| MOSI | 主 → 从 | 主机发送,从机接收(Master Out Slave In) |
| MISO | 主 ← 从 | 从机发送,主机接收(Master In Slave Out) |
| CS/SS | 主 → 从 | 片选信号,低有效,选中某个从设备 |
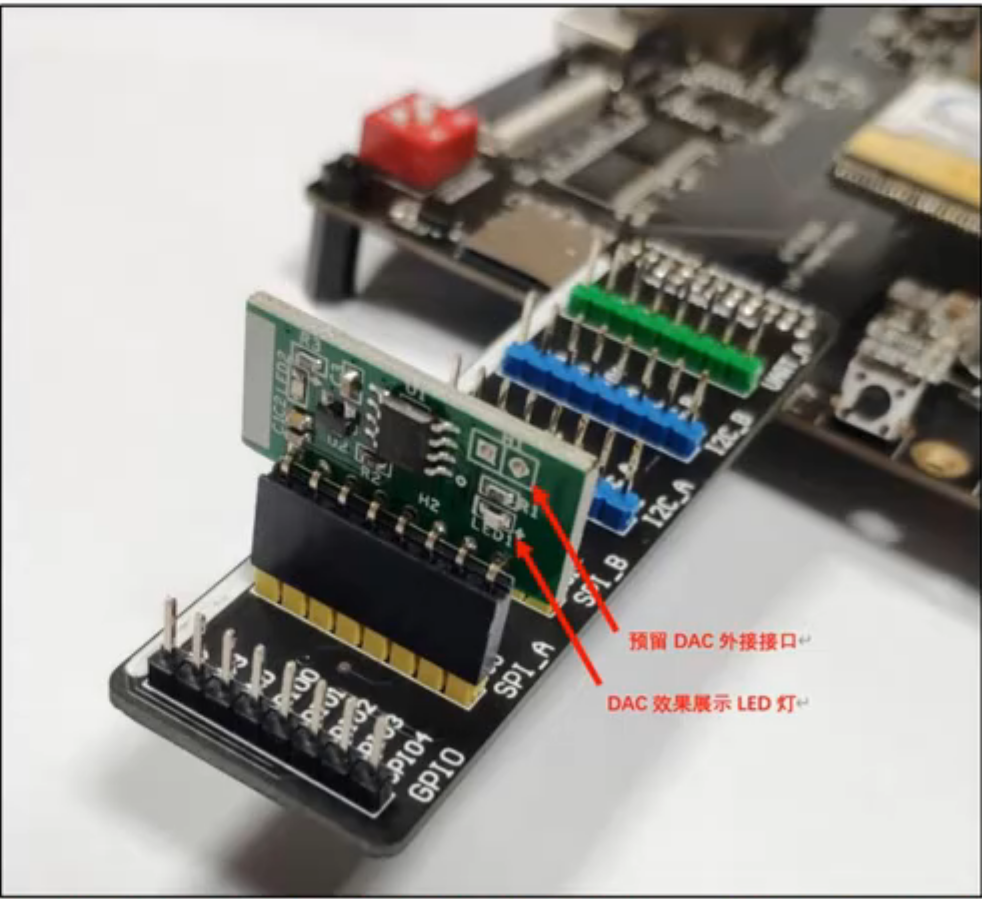
你的板子上已经引出了这些信号 :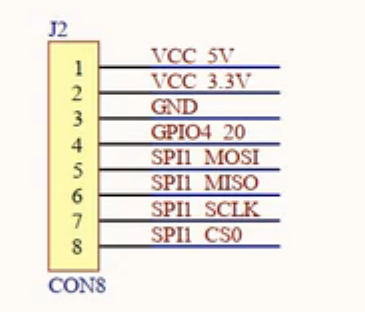
- J2 上标注了
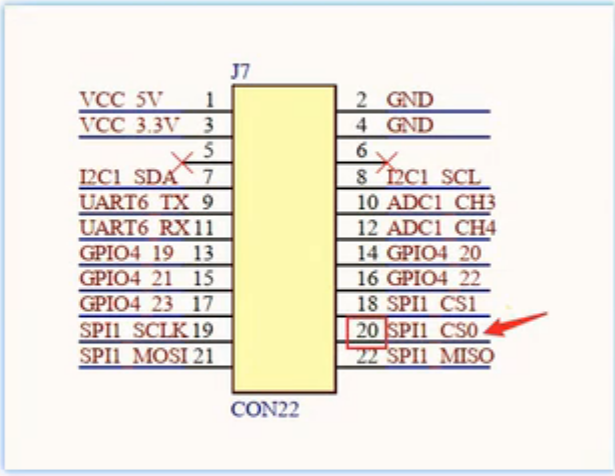
SPI1 MOSI、SPI1 MISO、SPI1 SCLK、SPI1 CS0 - J7 的 19、20、21、22 脚也是
SPI1 SCLK、SPI1 CS0、SPI1 MOSI、SPI1 MISO
这意味着你的 IMX6ULL 开发板通过排针把 SPI1 控制器的引脚都引出来了,你可以直接拿杜邦线外接 SPI 设备(比如这次要驱动的 TLC5615 DAC 小板子)。
通信过程概括 :
主机拉低 CS 选中从机,然后产生时钟。在每个时钟边沿,主机从 MOSI 线移出一位数据,同时从 MISO 线移入一位数据。传输完一个或多个字节后,主机拉高 CS 结束会话。
2. SPI 四种模式(CPOL / CPHA)
SPI 没有官方标准,不同从设备对时钟极性和相位的要求不一样,于是有了 4 种模式,由两个参数决定:
- CPOL(时钟极性)
CPOL=0:空闲时 SCK 为低电平CPOL=1:空闲时 SCK 为高电平
- CPHA(时钟相位)
CPHA=0:在第一个时钟边沿采样数据CPHA=1:在第二个时钟边沿采样数据
组合起来:
| 模式 | CPOL | CPHA | 空闲 SCK | 采样边沿 |
|---|---|---|---|---|
| 0 | 0 | 0 | 低 | 上升沿 |
| 1 | 0 | 1 | 低 | 下降沿 |
| 2 | 1 | 0 | 高 | 下降沿 |
| 3 | 1 | 1 | 高 | 上升沿 |
在 Linux 设备树或 spi_board_info 中,通过 spi-cpha 和 spi-cpol 属性来指定。例如:
dts
spi-cpha;
spi-cpol;不加时默认模式 0。TLC5615 数据手册要求 CPOL=0, CPHA=1(即模式 1)吗? 其实很多 DAC 只是要求在 SCK 上升沿移入数据,需要查手册。实验中如果不稳定,很可能就是模式没配对。我们的例子里暂未加这两个属性,内核会按模式 0 工作,但为了严谨,应该根据芯片手册填写。
3. Linux SPI 子系统框架
Linux 把 SPI 架构分成三层,像搭积木一样:
- SPI 控制器驱动 (
spi_master或新版本叫spi_controller)
直接与 SoC 的硬件 SPI 外设打交道。像spi_imx就是 IMX6ULL 的 SPI 控制器驱动,已经在内核里写好了,我们不用管。 - SPI 设备 (
struct spi_device)
描述一个挂载在 SPI 总线上的从设备。它保存着该设备的片选索引、最大频率、模式等。这些信息主要来自设备树。 - SPI 设备驱动 (
struct spi_driver)
我们写的驱动,负责与具体的从设备交互。内核通过compatible属性把它和设备树中的节点绑定起来。
一次 SPI 数据传输的核心数据结构:
struct spi_transfer:描述一次传输的细节(发送缓冲区、接收缓冲区、长度、速度等)。struct spi_message:将多个spi_transfer链接成一个原子操作,在全部传输完成后才释放 CS。spi_sync_transfer(spi, xfers, num):同步接口,提交传输并阻塞等待完成。这是我们驱动中最常用的函数。
辅助函数:
c
static inline int spi_read(struct spi_device *spi, void *buf, size_t len)
{
struct spi_transfer t = {
.rx_buf = buf,
.len = len,
};
return spi_sync_transfer(spi, &t, 1);
}就是一个只读的同步封装,简单明了。
4. 设备树中如何描述 SPI 设备
看你的设备树片段(arch/arm/boot/dts/100ask_imx6ull-14x14.dts):
dts
&ecspi1 {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_ecspi1>;
fsl,spi-num-chipselects = <2>;
cs-gpios = <&gpio4 26 GPIO_ACTIVE_LOW>, <&gpio4 24 GPIO_ACTIVE_LOW>;
status = "okay";
dac: dac {
compatible = "100ask,spidev";
reg = <0>;
spi-max-frequency = <1000000>;
};
};逐行解释:
&ecspi1:引用 SPI1 控制器节点。pinctrl-0 = <&pinctrl_ecspi1>;:指定引脚复用为 SPI 功能(已在别处定义)。cs-gpios:指定两个片选引脚,分别是 GPIO4_26 和 GPIO4_24,低有效。控制器会根据reg编号自动选择对应 GPIO。status = "okay";:启用该控制器。- 子节点
dac:代表一个挂在 ecspi1 上的 SPI 设备。reg = <0>表示使用第 0 个片选(即 GPIO4_26)。spi-max-frequency = <1000000>限制最大时钟为 1 MHz。 compatible = "100ask,spidev";:这是最关键的匹配字符串 。内核会用它与所有spi_driver的of_match_table比较,相等时就会调用驱动的probe函数,并把该节点生成的spi_device传进去。
你终端里执行 ls /sys/bus/spi/devices/spi0.0 能看到 driver、modalias、of_node 等,说明设备 spi0.0 已正确创建并与驱动绑定。
5. 最简单的 SPI 字符设备驱动框架
我们不只是让内核能识别设备,还要让用户空间程序(比如 dac_test)能打开、写入、读取 这个 SPI 设备。套路是:在 probe 中注册一个字符设备,生成 /dev/myspi 节点。
结构体骨架:
c
static struct spi_driver my_spi_driver = {
.driver = {
.name = "100ask_spi_drv",
.owner = THIS_MODULE,
.of_match_table = myspi_dt_match, // 与设备树 compatible 匹配
},
.probe = spi_drv_probe,
.remove = spi_drv_remove,
};probe 函数完成三件事:
- 保存
spi_device *指针(通常放到全局变量或spi_set_drvdata)。 - 申请字符设备号,绑定
file_operations。 - 创建设备类并在
/dev下生成节点。
你没贴出来的 file_operations 里面,read / write 就是最终与硬件通信的地方。
6. 实战:TLC5615 DAC 驱动完整编写
6.1 TLC5615 芯片及数据格式
TLC5615 是一个 10 位 DAC,它接受 12 位或 16 位输入序列。图片给出了格式:
- 12 位模式:高 10 位是数据,最低 2 位是无用位(sub-LSB)。
- 16 位模式:高 4 位无意义,接着 10 位数据,最后 2 位 sub-LSB 无用位。
我们要驱动它输出一个模拟电压,只需要给它发送合适的数字值即可。为了方便,我们可以固定使用 16 位模式,即发送两个字节,高 4 位随便填(但一般会考虑到对齐),后面跟着左移后的 10 位数据。
在老师提供的驱动代码 write 函数里,数据转换如下:
c
err = copy_from_user(&val, buf, size); // 得到用户空间的 16 位值(实际只用到低 10 位)
val <<= 2; // 数据左移 2 位,把 10 位数据挪到 D11..D2 位置,低 2 位为 sub-LSB
val &= 0x0fff; // 屏蔽高 4 位,确保发送 12 位有效数据为何 val <<= 2?
因为 10 位数据在芯片的 16 位帧里位于 "4 dummy bits + 10 data bits + 2 extra bits" 结构。如果我们把 10 位数据放在一个 16 位字的高 10 位,val << 2 就是把它移到 D15...D6 吗? 不,实际上代码里:
val是unsigned short,copy_from_user(&val, buf, 2)得到的是原始的用户值。- 左移 2 位再与
0x0fff相与,结果是一个 12 位的值,其高 10 位是数据,低 2 位为 0。 - 再把它拆成两个字节发送:
ker_buf[0] = val >> 8; ker_buf[1] = val;
那么对于 16 位帧来说,我们发送了两个字节共 16 位:高字节是val的高 8 位,低字节是val低 8 位。结果就是前 4 位为 0(因为val & 0x0fff清除了高 4 位),接着 10 位数据,最后 2 位为 0。这完全符合 16 位输入序列格式。
6.2 完整驱动代码(含注释)
下面是整合了老师源码的完整驱动程序,我将 write 方法配上详尽注释,并实现一个简单的 read(DAC 通常不需要读,这里返回错误)。你可以直接使用。
c
#include <linux/spi/spi.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/slab.h>
#include <linux/uaccess.h>
static int major = 0;
static struct class *my_spi_class;
static struct spi_device *g_spi;
static ssize_t spi_drv_write(struct file *file, const char __user *buf,
size_t size, loff_t *offset)
{
int err;
unsigned short val; // 用户写来的值, 2 字节
unsigned char ker_buf[2]; // 内核中将要发送的 2 字节
struct spi_transfer t;
// 我们约定一次必须写入 2 字节 (一个 DAC 数值)
if (size != 2)
return -EINVAL;
// 从用户空间读取 2 字节到 val
err = copy_from_user(&val, buf, size);
if (err)
return -EFAULT;
/*
* TLC5615 数据格式(16 位模式):
* 高 4 位: 无关位
* 接着 10 位: 有效数据 (D9~D0)
* 最低 2 位: sub-LSB 位 (通常填 0)
*
* 我们先把用户给的 val (假设其低 10 位有效) 左移 2 位,
* 使 10 位数据位于 12 位字段的高 10 位,然后清除高 4 位。
* 最终 val 是一个 12 位的值,再分为两个字节发送,结果:
* 字节0: 0000xxxx (前4位为0) 字节1: xxxxxx00 (后2位为0)
* 满足芯片要求。
*/
val <<= 2; // 10-bit data → D11..D2
val &= 0x0fff; // 屏蔽高4位,确保前4位为0
ker_buf[0] = (val >> 8) & 0xff; // 高字节
ker_buf[1] = val & 0xff; // 低字节
memset(&t, 0, sizeof(t));
t.tx_buf = ker_buf;
t.len = 2;
err = spi_sync_transfer(g_spi, &t, 1);
if (err) {
pr_err("spi_sync_transfer failed: %d\n", err);
return err;
}
return size;
}
static ssize_t spi_drv_read(struct file *file, char __user *buf,
size_t size, loff_t *offset)
{
// TLC5615 是纯写入设备,不支持读取,直接返回错误
return -ENOTSUP;
}
static int spi_drv_open(struct inode *inode, struct file *file)
{
return 0;
}
static int spi_drv_release(struct inode *inode, struct file *file)
{
return 0;
}
static const struct file_operations spi_drv_fops = {
.owner = THIS_MODULE,
.open = spi_drv_open,
.release = spi_drv_release,
.write = spi_drv_write,
.read = spi_drv_read,
};
static int spi_drv_probe(struct spi_device *spi)
{
g_spi = spi; // 保存 spi_device,供读写使用
major = register_chrdev(0, "100ask_spi", &spi_drv_fops);
if (major < 0) {
pr_err("Failed to register chrdev\n");
return major;
}
my_spi_class = class_create(THIS_MODULE, "100ask_spi_class");
if (IS_ERR(my_spi_class)) {
unregister_chrdev(major, "100ask_spi");
return PTR_ERR(my_spi_class);
}
device_create(my_spi_class, NULL, MKDEV(major, 0), NULL, "myspi");
pr_info("myspi device created, major=%d\n", major);
return 0;
}
static int spi_drv_remove(struct spi_device *spi)
{
device_destroy(my_spi_class, MKDEV(major, 0));
class_destroy(my_spi_class);
unregister_chrdev(major, "100ask_spi");
return 0;
}
static const struct of_device_id myspi_dt_match[] = {
{ .compatible = "100ask,spidev" },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, myspi_dt_match);
static struct spi_driver my_spi_driver = {
.driver = {
.name = "100ask_spi_drv",
.owner = THIS_MODULE,
.of_match_table = myspi_dt_match,
},
.probe = spi_drv_probe,
.remove = spi_drv_remove,
};
module_spi_driver(my_spi_driver);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("YourName");
MODULE_DESCRIPTION("SPI DAC driver for TLC5615");6.3 驱动代码关键点解析
- 模块入口 :
module_spi_driver(my_spi_driver);是宏,自动生成module_init和module_exit,里面调用spi_register_driver和spi_unregister_driver。比手写更简洁。 - compatible 匹配 :设备树里有
compatible = "100ask,spidev";,驱动of_match_table包含同样的字符串,所以它们会绑定。 - 字符设备注册 :老用法
register_chrdev一次占用 256 个次设备号,简单够用。主设备号动态分配(传入 0)。 - 数据传输 :
spi_sync_transfer第一个参数是g_spi,它指向该设备对应的spi_device。内核自动使用设备树中指定的spi-max-frequency、片选等。我们不需要手动控制 CS,核心层会帮我们开关cs-gpios。
7. 编译、装载与测试
7.1 编译驱动
把上述代码保存为 spi_drv.c,在同一目录编写 Makefile:
makefile
KERN_DIR = /path/to/your/kernel/source # 例如 ~/100ask_imx6ull-sdk/Linux-4.9.88
obj-m += spi_drv.o
all:
make -C $(KERN_DIR) M=$(PWD) modules
clean:
make -C $(KERN_DIR) M=$(PWD) clean然后执行 make,生成 spi_drv.ko。
7.2 更新设备树
根据操作截图: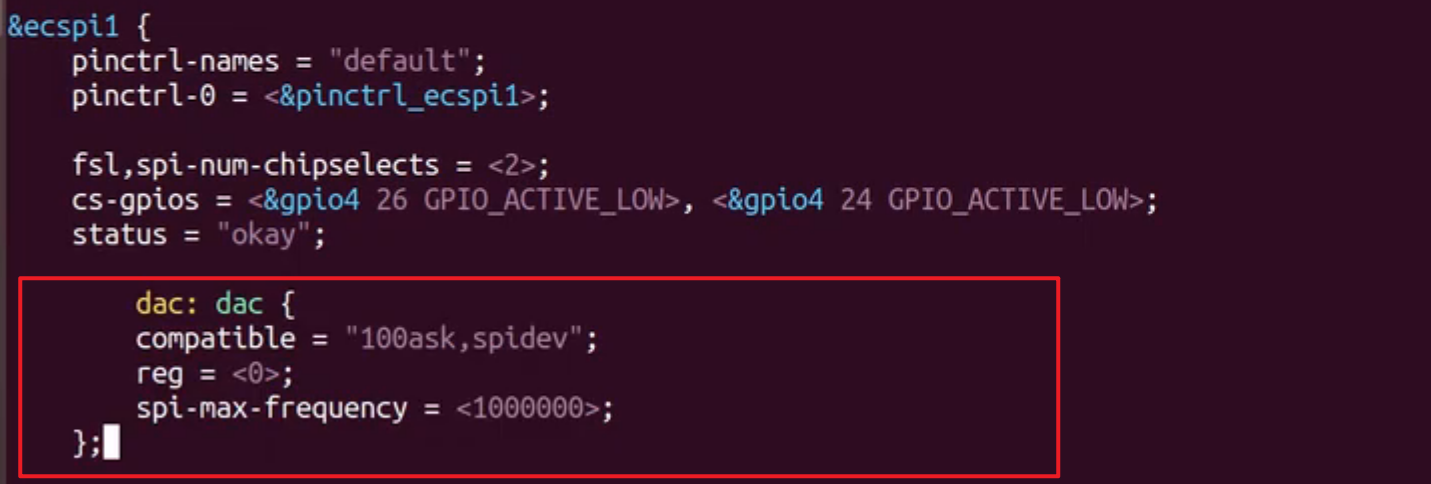
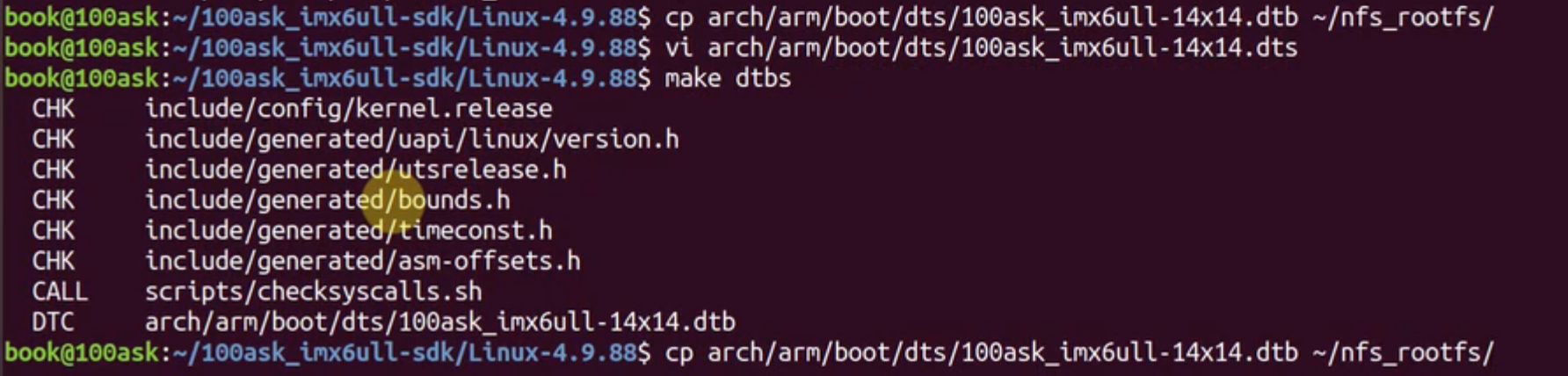
- 编辑
arch/arm/boot/dts/100ask_imx6ull-14x14.dts,在&ecspi1内加入dac节点(你已添加)。 - 在内核源码目录执行
make dtbs。 - 将新生成的
100ask_imx6ull-14x14.dtb复制到/boot目录或开发板的启动分区。 - 重启开发板。
7.3 装载驱动与测试
在开发板终端:
bash
insmod spi_drv.ko查看是否成功生成 /dev/myspi:
bash
ls -l /dev/myspi你的截图里还能看到 /sys/bus/spi/devices/spi0.0,以及dac_test 应用程序。dac_test 应该是接收两个参数:/dev/myspi 和 一个数值,例如:
bash
./dac_test /dev/myspi 100这会让 DAC 输出与数字 100 对应的模拟电压。你那几条执行记录:
bash
./dac_test /dev/myspi 1000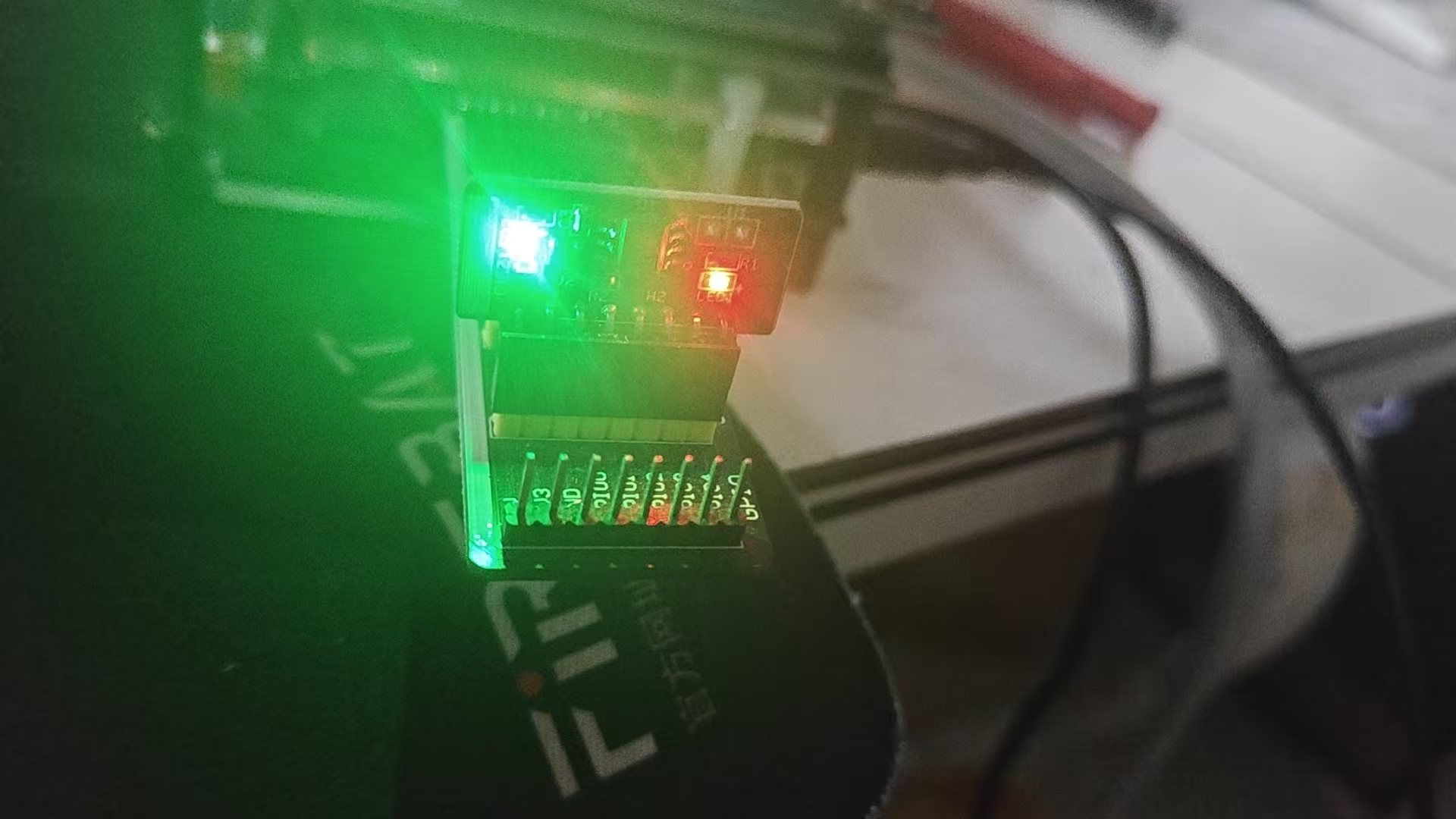
bash
./dac_test /dev/myspi 500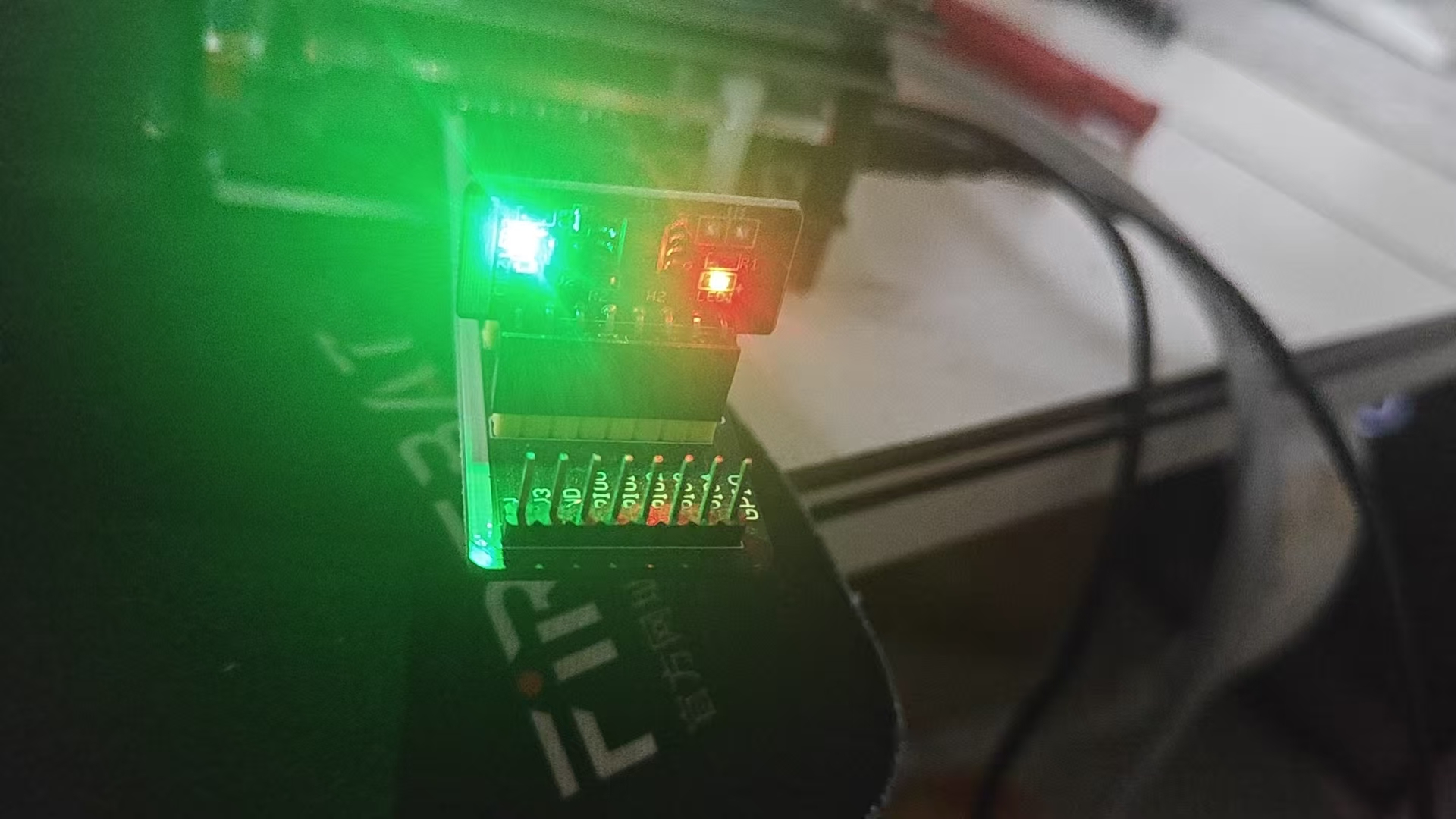
bash
./dac_test /dev/myspi 200
说明驱动工作正常,能多次写入不同值控制电压(后面 LED 亮度会变化)。
8. 常见问题与内核错误分析
8.1 错误:cannot set clock freq: 2 (base freq: 60000000)
你截图里出现过:
text
spi_imx 2008000.ecspi: cannot set clock freq: 2 (base freq: 60000000)这是因为你传给驱动的最大频率可能太小(比如 2 Hz),或者某个 spi_transfer 的 speed_hz 设得不成比例。但你的设备树里 spi-max-frequency = <1000000>(1 MHz),不应出现这个错误。可能原因:
- 之前测试时修改过频率但没有更新 dtb。
- 或者驱动程序里额外设置了
t.speed_hz = 2;之类。
解决办法:检查设备树频率,确保不要极端值;spi-max-frequency取 100000 ~ 按芯片最大能力。
8.2 内核 paging request 崩溃
你图中:
text
Unable to handle kernel paging request at virtual address 8010e710常见原因:访问了非法指针,比如 g_spi 还是 NULL 时就调用了 spi_sync_transfer,或者 copy_from_user 的缓冲区不合法。确保驱动在 probe 之后才被读写,并且 g_spi 被正确赋值。
9 完整流程框架(以写入数值 200 为例)
9.1 用户空间程序 dac_test 工作
- 解析命令行参数:
argv[1] = "/dev/myspi",argv[2] = "200"。 - 调用
open("/dev/myspi", O_WRONLY)打开设备文件。 - 将字符串
"200"转换为整数200(atoi或strtol)。 - 准备 2 字节数据:因为 TLC5615 是 10 位 DAC,用户程序可能直接将
200当成 16 位无符号数写入,也就是准备unsigned short val = 200;,然后调用write(fd, &val, 2)向设备写入 2 个字节。
注:你的截图中
./dac_test /dev/myspi 100等用法与上述逻辑一致。
9.2 C 库到系统调用
write(fd, &val, 2)触发SYS_write系统调用 ,陷入内核(ARM 上通过swi/svc指令)。- 内核根据系统调用号进入
sys_write(),然后调用vfs_write()。
9.3 VFS 层找到对应的字符设备驱动
vfs_write()从fd对应的struct file中取出file->f_op,即spi_drv_fops。- 调用
file->f_op->write(file, buf, count, &pos),也就是我们的spi_drv_write。 buf指向用户空间栈上的val地址(需要copy_from_user),count为 2。
9.4 驱动 spi_drv_write 内部执行细节
c
unsigned short val;
unsigned char ker_buf[2];
struct spi_transfer t;-
长度检查 :
size != 2→ 返回-EINVAL(这里为 2,通过)。 -
拷贝用户数据 :
copy_from_user(&val, buf, 2)将用户空间的两个字节复制到内核变量val。此时val = 200(无论主机字节序,内核内部视为 16 位无符号数)。 -
数据格式转换(符合 TLC5615 的 16 位帧要求):
val <<= 2;→200 << 2 = 800(二进制:0000 0011 0010 0000,十六进制0x320)val &= 0x0fff;→0x320 & 0xfff = 0x320(确保只保留低 12 位,防止溢出)- 此时 12 位值
0x320的组成:高 4 位0x3是 dummy 位(无关位),中间 10 位0x320 >> 2 = 200是有效数据,低 2 位为 0(sub-LSB)。
-
拆分为两个字节:
ker_buf[0] = (val >> 8) & 0xff;→0x03ker_buf[1] = val & 0xff;→0x20
-
构造 SPI 传输:
c
memset(&t, 0, sizeof(t)); t.tx_buf = ker_buf; // 发送缓冲区 t.len = 2; // 发送 2 字节 -
发起同步 SPI 传输:
c
err = spi_sync_transfer(g_spi, &t, 1);g_spi是在probe中保存的spi_device指针,它包含了从设备树继承的片选号、最大频率等信息。- 如果发送成功,返回 0;发生的字节数
size(2)返回给用户空间。
9.5内核 SPI 核心层(spi_sync_transfer)
spi_sync_transfer内部创建一个spi_message,将spi_transfer添加进去,然后调用spi_sync(spi, &message)。spi_sync为此次传输设置一个等待队列,然后将spi_message提交给 SPI 控制器驱动,并阻塞等待传输完成。- 实际的传输由
struct spi_controller的transfer_one_message方法完成,这里对应spi_imx驱动(IMX6ULL 的 SPI 控制器驱动)。
9.6SPI 控制器驱动(硬件操作)
- 片选控制 :控制器驱动根据
spi_device的片选信息(来自设备树cs-gpios = <&gpio4 26 ...>;)将 GPIO4_26 拉低,选中 TLC5615。 - 配置时钟 :根据设备树中的
spi-max-frequency = <1000000>配置 SCK 为 1 MHz,并根据模式 0(未添加spi-cpha/cpol)设置空闲低电平、上升沿采样等。 - 启动传输 :
- 将
ker_buf的两个字节(0x03,0x20)通过 MOSI 引脚顺序移出。 - 控制器自动产生 16 个时钟脉冲,每当时钟边沿到来时,发送一位数据。
- 由于本次只写不收,MISO 线上的数据被忽略(控制器不会将接收到的数据存入任何缓冲区,或者即使接收也不处理)。
- 将
- 等待完成:硬件发送完所有位后触发中断,中断服务程序通知 SPI 核心传输结束。
- 释放片选:控制器将 GPIO4_26 拉高,结束本次 SPI 会话。
spi_sync_transfer被唤醒,返回成功状态。
9.7 回到驱动层及用户空间
spi_drv_write获得err == 0,返回size(2)。vfs_write将返回值 2 一路返回给用户空间的write()调用。- 用户程序
dac_test收到write返回 2,之后可能调用close(fd)关闭设备。
9.8 硬件端 TLC5615 响应
- TLC5615 在 16 个时钟周期内收到了完整的一帧 16 位数据:
0x03、0x20。 - 根据芯片数据手册,它解析出 10 位有效数据
200,同时忽略高 4 位和低 2 位。 - 内部 DAC 寄存器更新,模拟输出电压变为 Vout = Vref × (200 / 1024)。
- 你实验板上的 LED 亮度随之变化,因为 LED 接在 DAC 输出端(你的截图备注"DAC效果展示LED灯")。
整个链条总结为 :
用户敲命令 → 用户程序写设备节点 → 系统调用陷入内核 → VFS 调用驱动 write → 驱动转换数据并调用 spi_sync_transfer → SPI 核心阻塞等待 → IMX SPI 控制器拉低 CS、产生时钟、发送两字节 → 完成后拉高 CS、唤醒等待 → write 返回 → 用户程序退出 → DAC 芯片更新电压输出。
任何一环出问题,都可以对照这个框架进行精准排查。
10. 总结与面试自测题
这篇教程带你走完了从 SPI 物理总线到底层驱动的全过程:
- 认识了四根 SPI 信号线和硬件连接。
- 理解了 CPOL/CPHA 决定的四种模式。
- 掌握了 Linux SPI 子系统的分层模型,关键结构体
spi_device、spi_driver、spi_transfer。 - 学会了在设备树中添加 SPI 从设备节点,并通过
compatible与驱动绑定。 - 完成了字符设备驱动的编写,使用
spi_sync_transfer发送数据。 - 分析了 TLC5615 的数据格式,并在
write函数中实现了位操作转换。 - 最后在开发板上实际装载并成功控制 DAC 输出。
面试自测题(附答案)
1. SPI 总线有几根线?分别是什么?
答:4 根,SCK(时钟)、MOSI(主发从收)、MISO(主收从发)、CS(片选,通常低有效)。
2. 什么是 CPOL 和 CPHA?它们在设备树中如何指定?
答:CPOL 定义空闲时钟电平(0 低 1 高),CPHA 定义数据采样边沿(0 第一边沿,1 第二边沿)。设备树中通过 spi-cpol 和 spi-cpha 布尔属性设置。
3. 在 Linux SPI 子系统中,spi_transfer 和 spi_message 的关系是什么?
答:spi_transfer 描述单次传输(TX/RX 缓冲区、长度)。spi_message 是多个 spi_transfer 的集合,保证它们被原子地执行(CS 在整条消息期间保持有效)。
4. 设备树中 compatible 属性有什么作用?
答:它告诉内核设备的型号,内核用它来匹配对应的驱动程序。驱动程序通过 of_match_table 声明自己支持的 compatible 列表,匹配成功后调用 probe 函数。
5. 驱动中的 probe 函数主要做哪些事情?
答:①获取并保存 spi_device;②初始化硬件(如配置时钟、复位);③注册字符设备/创建 sysfs 接口;④创建设备节点,让用户空间可以操作。
6. copy_from_user 和 copy_to_user 为什么是必需的?
答:因为用户空间和内核空间的内存是隔离的,不能直接解引用用户指针。这两个函数会处理地址合法性检查和缺页异常,安全地拷贝数据。
7. 如果板子上有两个同样的 SPI 设备,分别挂在 CS0 和 CS1,驱动应该怎么做才能同时支持?
答:不能在驱动中用单一全局变量 g_spi 指向设备。应当将 spi_device 填到 file 的 private_data 或者用 spi_set_drvdata 和 container_of 从 spi_device 获取私有结构。每次 open 时根据次设备号或 inode 定位到对应的 spi_device,避免覆盖。
8. TLC5615 的 12 位帧与 16 位帧在使用上有何区别?代码中 val <<= 2; val &= 0x0fff; 换成 val <<= 4 再发两个字节会怎样?
答:本驱动直接按 16 位帧发送,代码中的移位和掩码实现了高 4 位为 0、接着 10 位数据、低 2 位为 0 的正确帧格式。如果改成 val <<= 4,会导致数据偏移到更高位,超出 12 位范围,发送的时序不符合芯片要求,输出电压会出错。