实时、高速、准确采集船舶噪声信号是船舶的减振降噪以及故障判断奠定的出发点也是最基本的一步。针对船舶中出现的三种不同类型的噪声:空气噪声、水噪声以及振动噪声,可以选用相应的传感器来进行精确测量。具体而言,传声器可用于测量空气中的噪声,加速度传感器适用于捕捉振动产生的噪声,而水听器则专门用于检测水中的噪声。通过这三种专门的传感器,可以有效地对船舶的各种噪声进行详细测量与分析[4],再设计一个采集系统将这些电信号经过调理、采集、量化以及编码后转换成计算机可识别的数字信号
ZYNQ 系列芯片,集成了处理器系统(PS)和可编程逻辑(PL)两个核心组成部分。处理器芯片为 ARM 的双核处理器,可编程逻辑芯片为Xilinx 的7系列的FPGA 架构实现了全功能的片上系统的构建。这种结合不仅优化了硬件的处理能力,同时也提高了系统的灵活性和多功能性,使得ZYNQ 系列成为适用于各种复杂数字计算需求的理想选择[10]。 ARM 处理器有强大的软件可编程性,FPGA 有强大的硬件可编程性巧妙整合,ZYNQ 实现和高效巧妙的整合,同时ZYNQ 支持高速接口,对于需要高速数据传输的应用情况ZYNQ 也可以高效地实现。相对于传统的分离式ARM 和FPGA 搭配,ZYNQ 采取"底板+核心板"硬件设计,实现更高的集成度,进而使采集系统的体积得到优化并兼具灵活性、可拓展性[11]。在设计一个高效的数据采集和处理系统时,当进行多路输入信号的采集以及预处理阶段时,利用FPGA 高速的并行处理能力来执行这些要求实时性的任务。ARM 处理器负责调度整个系统充当系统的控制核心,包括下达采集指令、接收数据以及数据的上传等功能。此外,ARM 处理器的灵活性使得整个系统可以根据具体需求进行配置,易于扩展新的功能。本文结合ZYNQ 的优势与系统的需求,提出了将ZYNQ 平台应用于多通道船舶噪声采集系统的设计方案,实现对船舶噪声的多通道采集与传输。
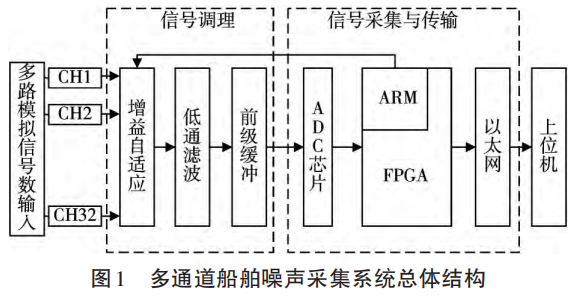
2 多通道船舶噪声采集系统总体设计方案
如图1 所示,系统的整体结构主要由:噪声检测传感器、信号调理单元、信号采集与传输单元,以及上位机这四个部分组成。这种配置中,噪声传感器负责实时监测舱室内的噪声水平,并将所采集的信号传送至信号调理单元。信号调理单元针对不同传感器提供的信号幅值执行增益切换、低通滤波和前级缓冲等处理,以便为模数转换器(ADC)的采样提供适当的前处理。此后,ADC 负责实现连续的模拟信号转到离散的数字信号的转换。转换后的数字信号经由ZYNQ 的PS 端接收,并解析来自PC机的指令后通过ZYNQ 内部的AXI 总线,传输到 ZYNQ 的PS 端,在这里实现对ADC 的控制和采样数据的接收。完成这些步骤后,采集到的数据通过以太网通信接口发送到PC 机,进行进一步的分析和处理。这种设计不仅确保了数据采集的高效性和准确性,还提高了系统对不同噪声类型的响应能力和处理速度,使其能够在多种应用环境下可靠地工作。
3 系统硬件电路设计
3.1 增益自适应电路
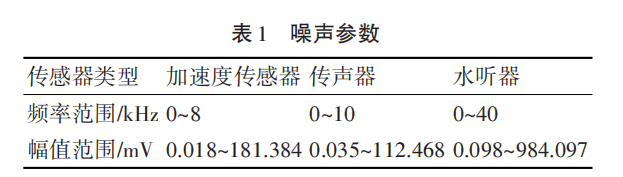
为了适应不同的测量需求和环境条件在该采集系统中,输入信号主要分为两类,具体如下。第一类输入信号:这类信号的频率范围从0~10 kHz,信号的幅值在0~200 mV 之间。这种信号通常适用于低频的检测应用,如温度、压力或者低速机械振动的监测,这些信号通常需要高精度的低幅值信号处理技术。第二类输入信号:相对于第一类,这类信号的频率范围更广,从0 扩展至40 kHz,而幅值则从0 扩展到1 V。这种信号类型适合于更高频率的应用场景,如音频处理、高速机械振动检测等,需要系统能够处理较宽的频率范围和更高的信号幅值。
在本系统中,采用的AD7768 ADC 选用4.096 V作为外部基准电压,用5 V 对ADC 进行供电,以确保ADC 在最佳性能状态下运作并提供足够的裕量。系统输入信号为0~200 mV 和0~1 V 两种,为了将这些信号适配至ADC 的输入范围,设计了一个增益切换电路,通过同相比例放大电路实现不同倍数的放大------对0~200 mV 信号采用×20 倍放大,而对0~1 V 信号则采用×4 倍放大。这一增益切换是通过模拟开关进行的,此方法的优势在于它不会占用过多的IO 口,简化了系统控制,同时实现电路的高效利用以及信号的灵活处理。这样的设计确保了不同幅度的信号都能被有效处理,同时也进一步实现系统电路的简化以及系统可靠性的提升,如图2 所示。
3.2 调理滤波电路
在输入信号的传输过程中,由于长导线的使用,信号可能受到高频噪声的干扰,并且还可能出现通道之间的串扰噪声。为了提升信噪比并减少噪声对数据采集精度的影响,必须设计一个低通滤波器来进一步降低噪声干扰[12]。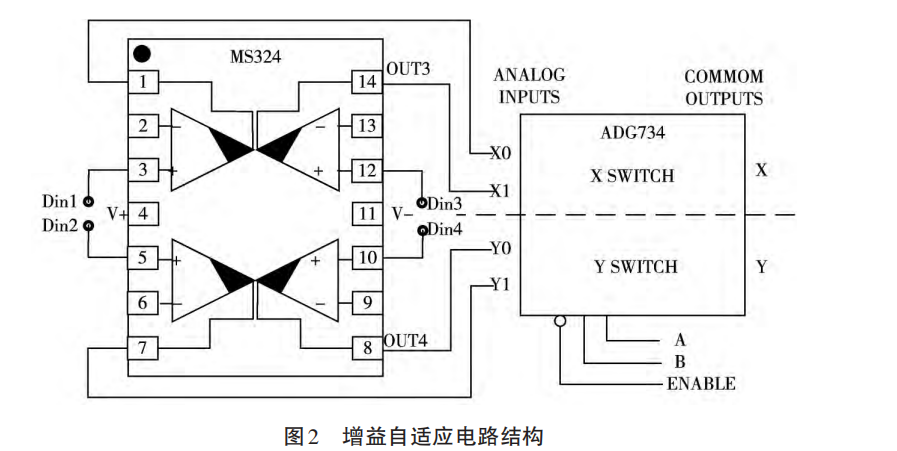
本系统的所采集的输入信号频率范围为0~40 kHz,因此需要低通滤波器在40 kHz 通带内有较好的平坦度结合滤波器性能与综合电路复杂情况,决定采用二阶巴特沃斯有源滤波器进行滤波,如图3所示。在实际应用中,低通滤波器的截止频率一般设为信号最高频率的5 倍~10 倍,本系统中三种输入信号中最高频率为40 kHz,因此将滤波器截止频
率设为200 kHz。
5 结语
本研究开发的多通道噪声采集系统基于 ZYNQ 平台设计,结合了FPGA 的高度硬件可编程性和完整的ARM 处理器系统。该系统的一个显著特点是,ARM 处理器与FPGA 之间的数据传输速度快且非常稳定,这种高效的交互机制不仅简化了开发过程,降低了开发的复杂性,同时也显著缩短了整个项目的开发时间,使得系统更易于实现和优化。此外,该设计还支持方便地扩展各类外设。 ZYNQ 平台中的处理器系统(PS)与可编程逻辑(PL)的协同工作确保了指令解析和数据传输的高效性,从而为噪声数据的快速和可靠传输至PC 机提供了坚实保障。在实际应用中,该系统展现出广泛的潜力,不仅促进了噪声检测技术的进步,还为相关领域的工程应用开辟了更多的可能性。这些优势使得本系统在船舶等噪声密集型行业中尤为有价值,能有效地帮助工程师和研究人员进行更精确的噪声分析和控制。

信迈提供ZYNQ MPSOC数采卡方案定制服务。