
文章目录
- 1、精度分析
- [2、SceneFlow 的焦距和基线](#2、SceneFlow 的焦距和基线)
-
- [1. 核心参数数值](#1. 核心参数数值)
- [2. 深度计算关系](#2. 深度计算关系)
- 3、评价指标
-
- [1️⃣ MAE(Mean Absolute Error)](#1️⃣ MAE(Mean Absolute Error))
- [2️⃣ RMSE(Root Mean Square Error)](#2️⃣ RMSE(Root Mean Square Error))
- [3️⃣ AbsRel(Absolute Relative Error)](#3️⃣ AbsRel(Absolute Relative Error))
- [4️⃣ δ < 1.25(Accuracy)](#4️⃣ δ < 1.25(Accuracy))
1、精度分析
Q:f_pixel = 609.83517297264575 # 校正后焦距(取 P10,0) B_meters = 65.03404857 / 1000.0 # 基线 mm → m 双目深度估计,B 和 f 参数如上图所示,如果视差精度为 x 个像素,不同距离下深度的估计出来的误差范围是多少,绘制为曲线 x 的取值范围 0.1 到 1,每隔 0.2 绘制一条曲线, x = 0.1 x = 0.3 ...横坐标 20 cm 到 60 cm,纵坐标单位 mm
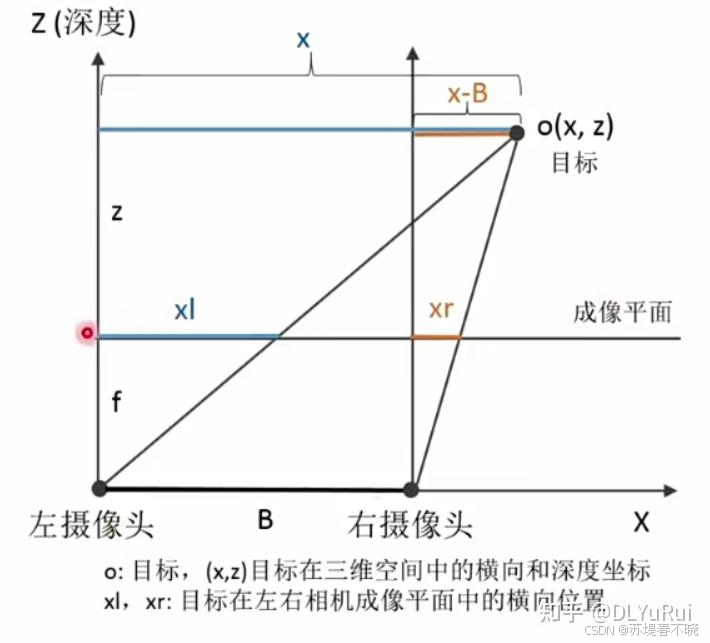
根据校正后焦距 f p i x e l f_{pixel} fpixel 和基线 B B B,双目系统的深度计算公式为: Z = f ⋅ B d Z = \frac{f \cdot B}{d} Z=df⋅B
深度误差 Δ Z \Delta Z ΔZ 与视差误差 Δ d \Delta d Δd 的关系可以通过对 Z Z Z 求导得出: Δ Z = ∣ ∂ Z ∂ d ∣ ⋅ Δ d = f ⋅ B d 2 ⋅ Δ d = Z 2 f ⋅ B ⋅ Δ d \Delta Z = \left| \frac{\partial Z}{\partial d} \right| \cdot \Delta d = \frac{f \cdot B}{d^2} \cdot \Delta d = \frac{Z^2}{f \cdot B} \cdot \Delta d ΔZ= ∂d∂Z ⋅Δd=d2f⋅B⋅Δd=f⋅BZ2⋅Δd
深度误差分析与可视化根据该公式,深度误差与距离的平方成正比。在 20 cm 到 60 cm内,不同视差精度 x x x 对深度估计的影响如下:
py
import numpy as np
import matplotlib.pyplot as plt
# 核心参数定义
f_pixel = 609.83517297264575 # 校正后焦距
B_mm = 65.03524912178487 # 基线长度(mm)
f_B = f_pixel * B_mm # 重投影常数
# 距离范围 (mm)
Z = np.linspace(200, 600, 100)
# 视差精度范围 x (0.1, 0.3, 0.5, 0.7, 0.9)
x_values = np.arange(0.1, 1.1, 0.2)
plt.figure(figsize=(10, 6))
for x in x_values:
# 深度误差公式: delta_Z = (Z^2 / (f*B)) * x
delta_Z = (Z**2 / f_B) * x
plt.plot(Z/10, delta_Z, label=f'x = {x:.1f} px')
plt.title('Stereo Depth Error vs Distance (20cm - 60cm)')
plt.xlabel('Distance (cm)')
plt.ylabel('Depth Error (mm)')
plt.grid(True, linestyle='--', alpha=0.7)
plt.legend(title='Disparity Error (x)')
plt.show()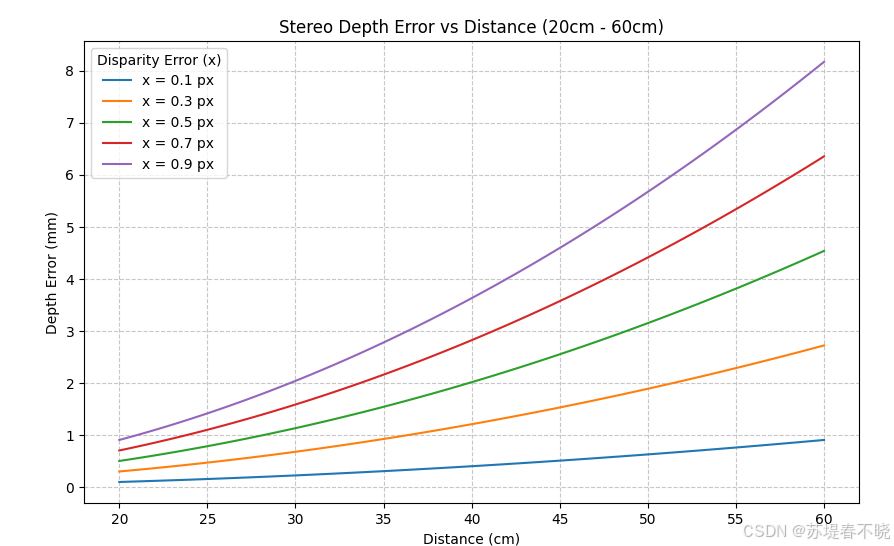

2、SceneFlow 的焦距和基线
Scene Flow 数据集(由 FlyingThings3D、Driving 和 Monkaa 三个子集组成)由于是合成数据集。
根据该数据集的官方文档和主流视觉算法实现,其核心参数 b b b(基线)和 f f f(焦距)如下:
1. 核心参数数值
- 焦距 f f f :1050 像素 (pixel)
- 在渲染这些合成图像时,虚拟相机的焦距被统一设定为 1050 像素。
- 基线 b b b (Baseline) :1.0 单位 (unit)
- 在虚拟 3D 空间中,左右相机的距离被设定为一个标准单位。在计算物理深度时,通常将其视作 1.0 1.0 1.0。
- 分辨率 (Resolution) :960 x 540
- 这是该数据集的标准输出图像尺寸。
2. 深度计算关系
在 Scene Flow 数据集中,视差(Disparity) d d d 与深度 Z Z Z 的转换关系依然遵循标准公式:
Z = f ⋅ b d = 1050 × 1.0 d Z = \frac{f \cdot b}{d} = \frac{1050 \times 1.0}{d} Z=df⋅b=d1050×1.0
计算得到的深度,要乘以基线的实际单位,eg xxx mm
3、评价指标
1️⃣ MAE(Mean Absolute Error)
M A E = 1 N ∑ i = 1 N ∣ Z ^ i − Z i ∣ \mathrm{MAE} = \frac{1}{N} \sum_{i=1}^{N} |\hat{Z}_i - Z_i| MAE=N1i=1∑N∣Z^i−Zi∣
平均绝对误差:预测深度和真实深度的平均偏差。
2️⃣ RMSE(Root Mean Square Error)
R M S E = 1 N ∑ i = 1 N ( Z ^ i − Z i ) 2 \mathrm{RMSE} = \sqrt{\frac{1}{N} \sum_{i=1}^{N} (\hat{Z}_i - Z_i)^2} RMSE=N1i=1∑N(Z^i−Zi)2
对大误差更敏感(平方惩罚)。
3️⃣ AbsRel(Absolute Relative Error)
A b s R e l = 1 N ∑ i = 1 N ∣ Z ^ i − Z i ∣ Z i \mathrm{AbsRel} = \frac{1}{N} \sum_{i=1}^{N} \frac{|\hat{Z}_i - Z_i|}{Z_i} AbsRel=N1i=1∑NZi∣Z^i−Zi∣
相对误差(无尺度误差)
4️⃣ δ < 1.25(Accuracy)
δ = max ( Z ^ , Z ) min ( Z ^ , Z ) < 1.25 \delta = \frac{\max(\hat{Z}, Z)}{\min(\hat{Z}, Z)} < 1.25 δ=min(Z^,Z)max(Z^,Z)<1.25
预测深度在允许比例误差范围内的比例