一、数据集概览
VisDrone 是由天津大学机器学习与数据挖掘实验室 AISKYEYE 团队发布的大规模无人机视角目标检测基准数据集,对应 ICCV 2019 的 "Vision Meets Drone" 挑战赛。
1.1 数据规模
| 子集 | 图像数量 | 说明 |
|---|---|---|
| 训练集 (train) | 6,471 张 | 用于模型训练 |
| 验证集 (val) | 548 张 | 用于超参数调优与模型选择 |
| 测试集 (test-dev) | 1,610 张 | 含标注,可进行论文实验与结果发布 |
-
总标注框数量:超过 260 万个边界框
-
图像来源:288 个视频片段 + 10,209 张静态图像
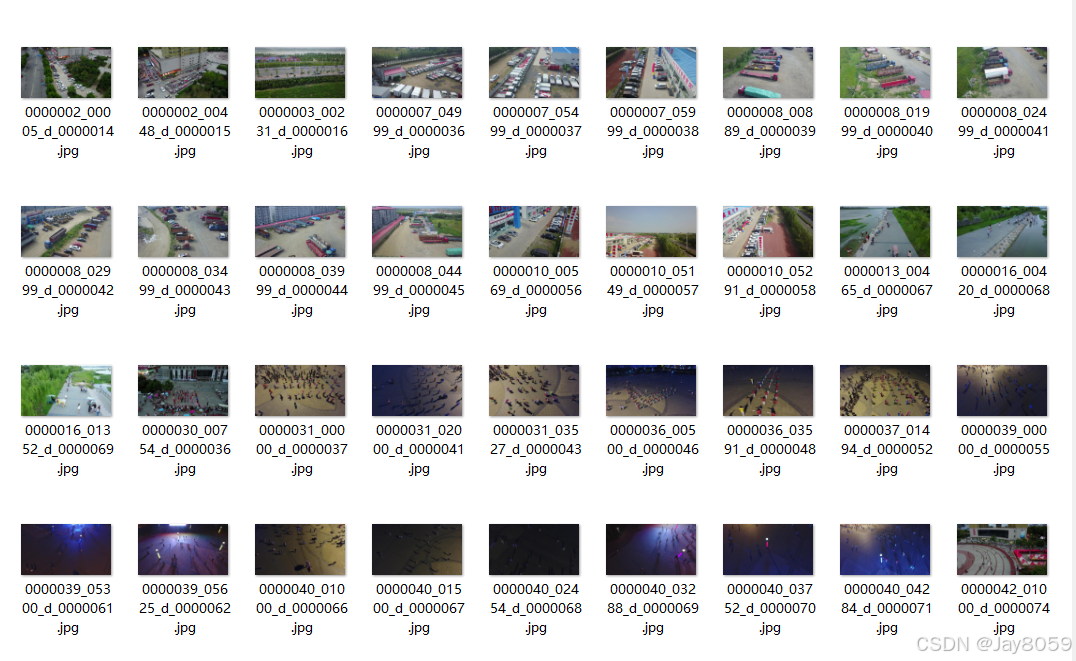
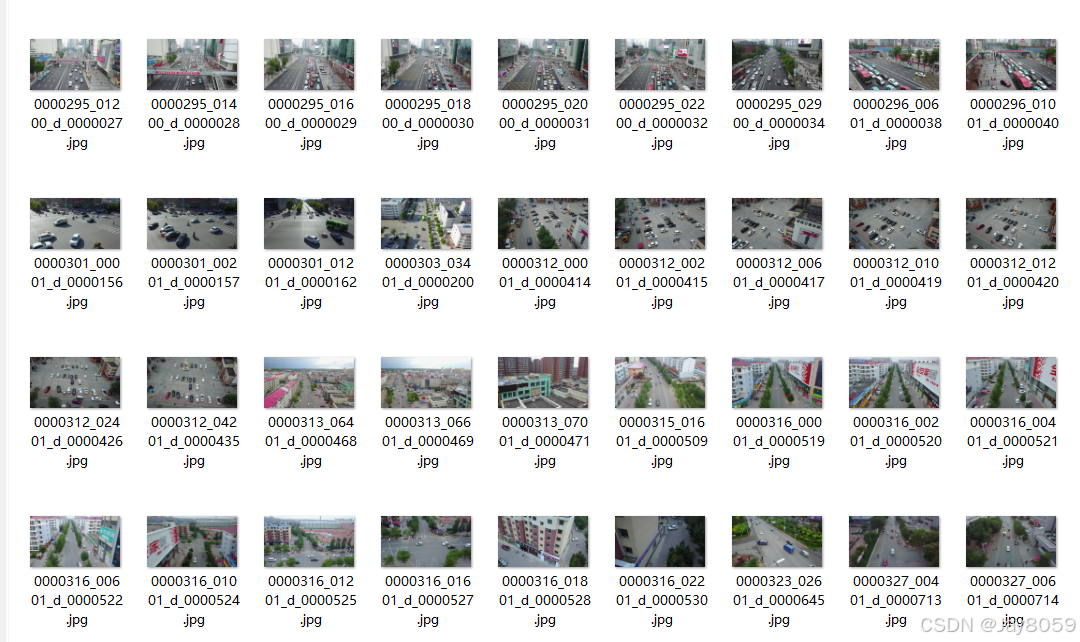
1.2 采集特点
-
地理位置:中国 14 个不同城市,相距数千公里
-
场景类型:城市、乡村等多种环境
-
目标对象:行人、车辆、自行车等交通相关目标
-
密度分布:稀疏场景与拥挤场景均有覆盖
-
采集条件:多种无人机平台、不同天气与光照条件
-
数据多样性:有利于提升模型泛化能力
二、目标类别
数据集包含 10 个预定义类别,如下表所示:
| 类别ID | 英文名称 | 中文名称 |
|---|---|---|
| 0 | pedestrian | 行人 |
| 1 | people | 人群 |
| 2 | bicycle | 自行车 |
| 3 | car | 小汽车 |
| 4 | van | 面包车 |
| 5 | truck | 卡车 |
| 6 | tricycle | 三轮车 |
| 7 | awning-tricycle | 带篷三轮车 |
| 8 | bus | 公交车 |
| 9 | motor | 摩托车 |
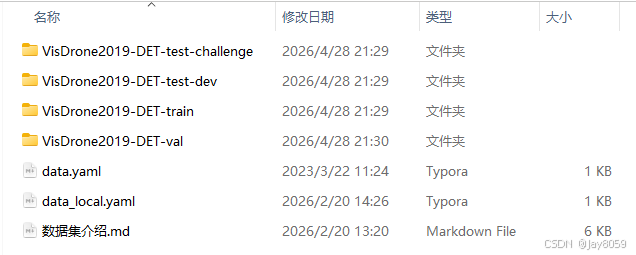
三、目录结构
dataset_visdrone/
├── data.yaml # YOLO 数据集配置文件
├── VisDrone2019-DET-train/ # 训练集
│ ├── images/ # 训练图像
│ └── labels/ # 训练标签 (YOLO格式)
├── VisDrone2019-DET-val/ # 验证集
│ ├── images/ # 验证图像
│ └── labels/ # 验证标签
└── VisDrone2019-DET-test-dev/ # 测试集
├── images/ # 测试图像
└── labels/ # 测试标签四、标注格式
4.1 YOLO 格式说明
本数据集已转换为 YOLO 标准格式 。每个图像对应一个同名的 .txt 标签文件,每行代表一个目标:
<class_id> <x_center> <y_center> <width> <height>| 字段 | 含义 | 取值范围 |
|---|---|---|
| class_id | 类别ID | 0~9 |
| x_center | 边界框中心 x 坐标(归一化) | 0, 1 |
| y_center | 边界框中心 y 坐标(归一化) | 0, 1 |
| width | 边界框宽度(归一化) | 0, 1 |
| height | 边界框高度(归一化) | 0, 1 |
坐标均为相对图像尺寸的归一化值。
4.2 标注示例
3 0.026429 0.956190 0.052857 0.074286 # car - 小汽车
8 0.982143 0.737619 0.035714 0.075238 # bus - 公交车
0 0.208929 0.655714 0.007857 0.025714 # pedestrian - 行人(小目标)五、小目标特性
VisDrone 数据集非常适合小目标检测研究,具有以下典型特点:
5.1 目标尺度小
-
无人机航拍高度较高,目标在图像中占据像素较少
-
行人、车辆等目标常表现为几十像素甚至更小
-
大量目标的宽度或高度归一化后小于 0.02(即占图像 2% 以下)
5.2 密集分布
-
交通路口、人行道等场景中目标密集
-
遮挡严重,增加检测难度
5.3 多尺度混合
-
同一张图像中存在近大远小现象
-
尺度跨度大,对多尺度特征提取要求高
5.4 类别分布不均
-
小汽车 (car)、自行车 (bicycle)、公交车 (bus) 等出现频率较高
-
部分类别如带篷三轮车等样本较少
六、与无人机小目标检测研究的契合度
本数据集适用于:
-
无人机航拍场景:典型俯视/斜视视角
-
小目标检测:大量小尺度目标,符合研究需求
-
实际应用:交通监控、人群统计、安防巡检等
适用于《基于深度学习的无人机航拍小目标检测算法研究》等课题。
七、特殊标注说明
原始 VisDrone 标注包含以下特殊处理:
-
忽略区域 (Ignore Regions):因分辨率低或过于拥挤而难以精确标注的区域
-
其他类别 (Others):如工程车、叉车、油罐车等罕见类型,评估时不计入
本数据集已转换为 YOLO 格式,上述区域在转换中已做相应处理。
八、配置文件说明
data.yaml 用于 YOLO 等框架的数据集配置,主要字段如下:
path: <数据集根目录路径>
train: VisDrone2019-DET-train/images
val: VisDrone2019-DET-val/images
test: VisDrone2019-DET-test-dev/images
nc: 10 # 类别数量
names:
0: pedestrian
1: people
2: bicycle
3: car
4: van
5: truck
6: tricycle
7: awning-tricycle
8: bus
9: motor使用前请将 path 修改为本机数据集的实际路径。
九、参考文献
如在论文中使用本数据集,建议引用:
@article{zhu2021detection,
title={Detection and tracking meet drones challenge},
author={Zhu, Pengfei and Wen, Longyin and Du, Dawei and Bian, Xiao and Fan, Heng and Hu, Qinghua and Ling, Haibin},
journal={IEEE Transactions on Pattern Analysis and Machine Intelligence},
volume={44},
number={11},
pages={7380--7399},
year={2021},
publisher={IEEE}
}十、相关链接
-
数据集官网:https://aiskyeye.com/
-
ICCV 2019 挑战赛:Vision Meets Drone Object Detection in Image Challenge