MUSIC算法DOA估计 + 最小二乘定位 vs EKF轨迹跟踪对比
原创代码,包运行成功,可联系我获取讲解和定制
文章目录
程序详解
多传感器协同目标动态轨迹跟踪仿真系统,核心思路是将阵列信号处理、几何定位与卡尔曼滤波三条技术链串联起来,模拟雷达/通信领域中的多站被动定位场景。下面是系统整体的处理流程:
背景
代码模拟了一个被动多站目标定位与跟踪 场景:4个固定传感器站各自配备一个8阵元均匀线阵( U L A ULA ULA),通过接收目标辐射的窄带信号,独立估计目标方向角( D O A DOA DOA),再将多站测量融合定位,最后用扩展卡尔曼滤波( E K F EKF EKF)平滑轨迹。这是雷达、无线电侦察、声呐、无人机定位等领域的核心技术链。
仿真输出与分析
代码生成4张图:
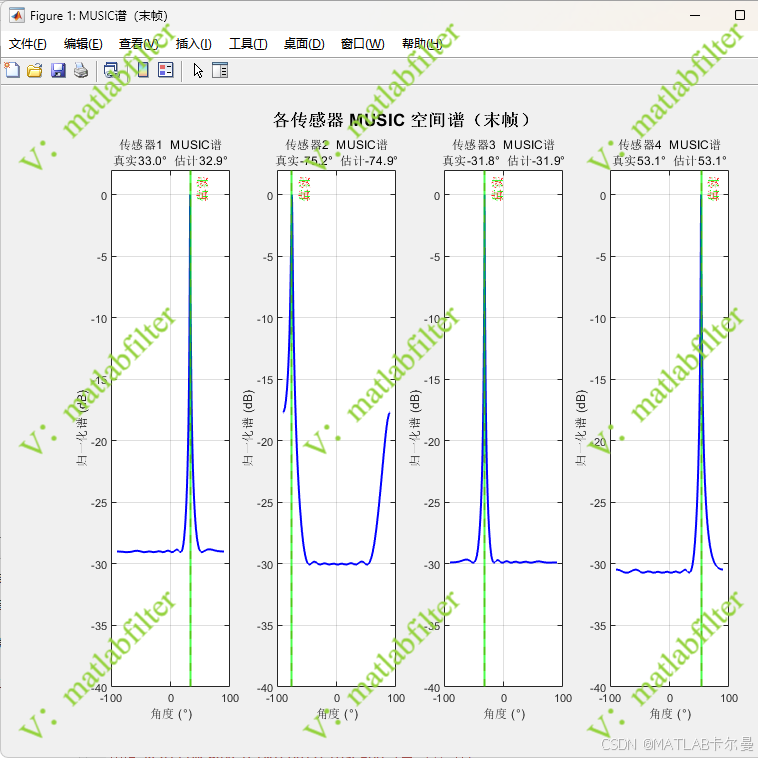
- M U S I C MUSIC MUSIC空间谱(末帧各传感器峰值可视化)
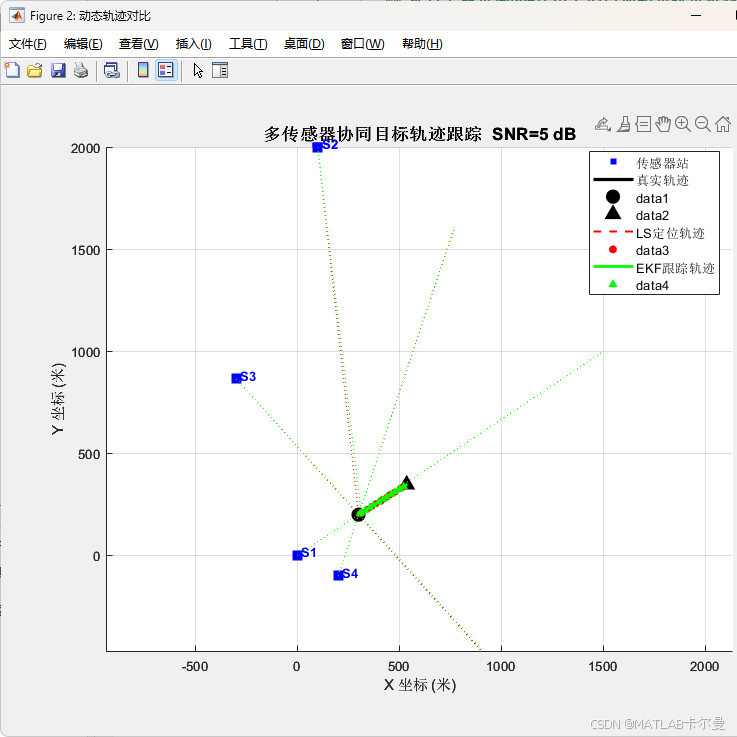
- 真实/LS/EKF三条轨迹的二维对比
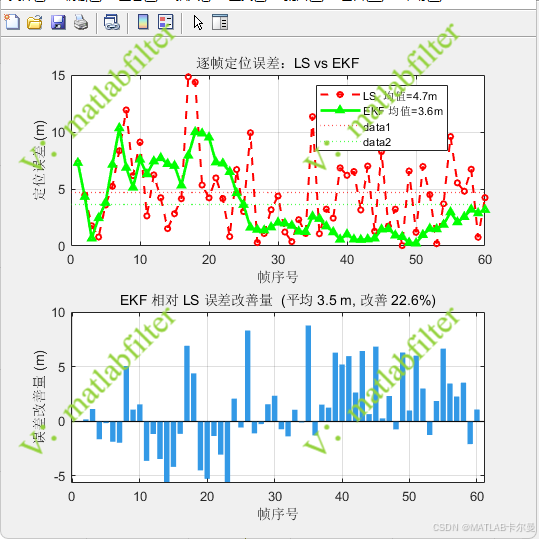
- 逐帧误差折线与EKF改善量柱图
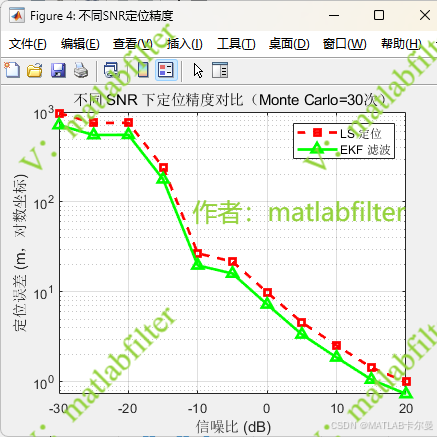
- 不同SNR下的Monte Carlo精度曲线(半对数坐标)
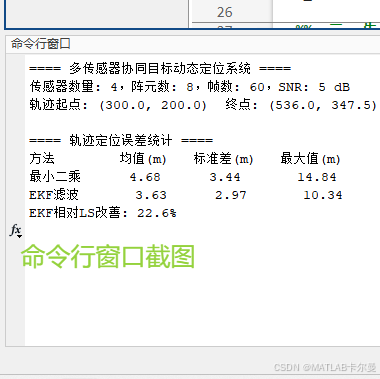
- 命令行窗口同步输出LS与EKF的均值/标准差/最大误差及EKF的相对改善百分比。
修改
SNR_dB、N_elements、N_sensors可以快速进行对比实验。
具体如下:
各传感器MUSIC谱图像:
轨迹跟踪示意图:
滤波前后误差对比:
不同信噪比下的定位误差:
命令行窗口截图:
MATLAB源代码
部分代码如下:
matlab
%% 多传感器协同DOA技术下的目标动态轨迹跟踪研究
% 功能:MUSIC算法DOA估计 + 最小二乘定位 vs EKF轨迹跟踪对比
% 新增:动态目标轨迹、EKF滤波器、轨迹误差对比分析
% 2026-04-25 / Ver1
clear; close all; clc;
rng(0);
%% 系统参数
fc = 1e9; % 载频 1 GHz
c = 3e8; % 光速
lambda = c / fc; % 波长
d = lambda / 2; % 半波长阵元间距
N_elements = 8; % 阵元数
N_snapshots = 256; % 每帧快拍数(固定,不再用连续时域采样以节省内存)
N_targets = 1; % 目标数(MUSIC子空间划分依据)
SNR_dB = 5; % 信噪比 (dB)
% 传感器站位置 (x, y),单位:米
sensor_locations = [
0, 0;
100, 2000;
-300, 866;
200, -100;
];
N_sensors = size(sensor_locations, 1);
%% 二、生成目标动态轨迹(匀速直线运动 + 轻微转弯)
N_frames = 60; % 总帧数(时间步数)
dt = 0.5; % 帧间时间间隔 (s)
% 真实轨迹:从起点出发,沿近似直线运动完整代码:https://download.csdn.net/download/callmeup/92829595
如需帮助,或有导航、定位滤波相关的代码定制需求,请点击下方卡片联系作者