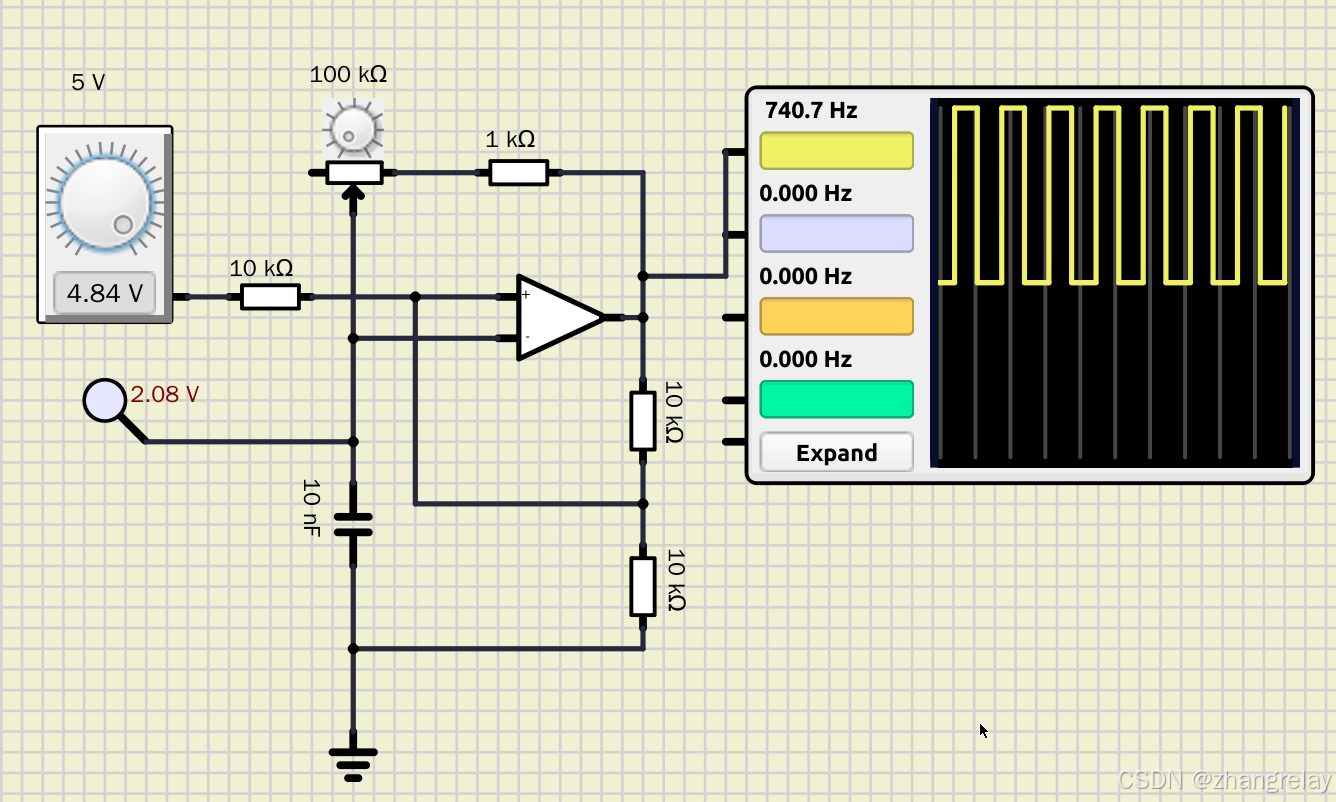
 740Hz方波
740Hz方波
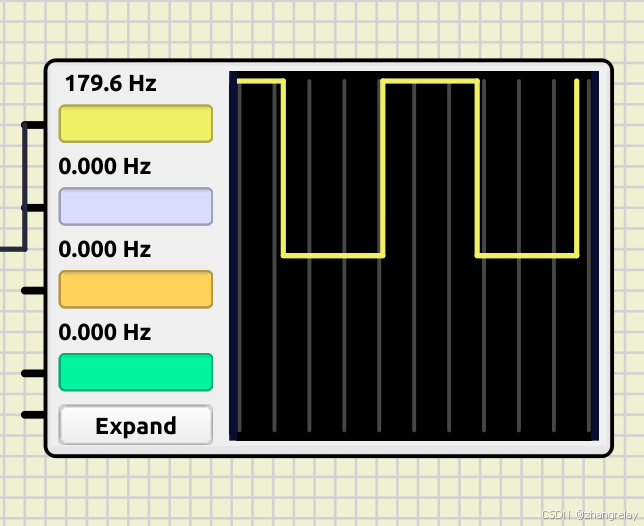 思考:如何获得这种方波呢
思考:如何获得这种方波呢 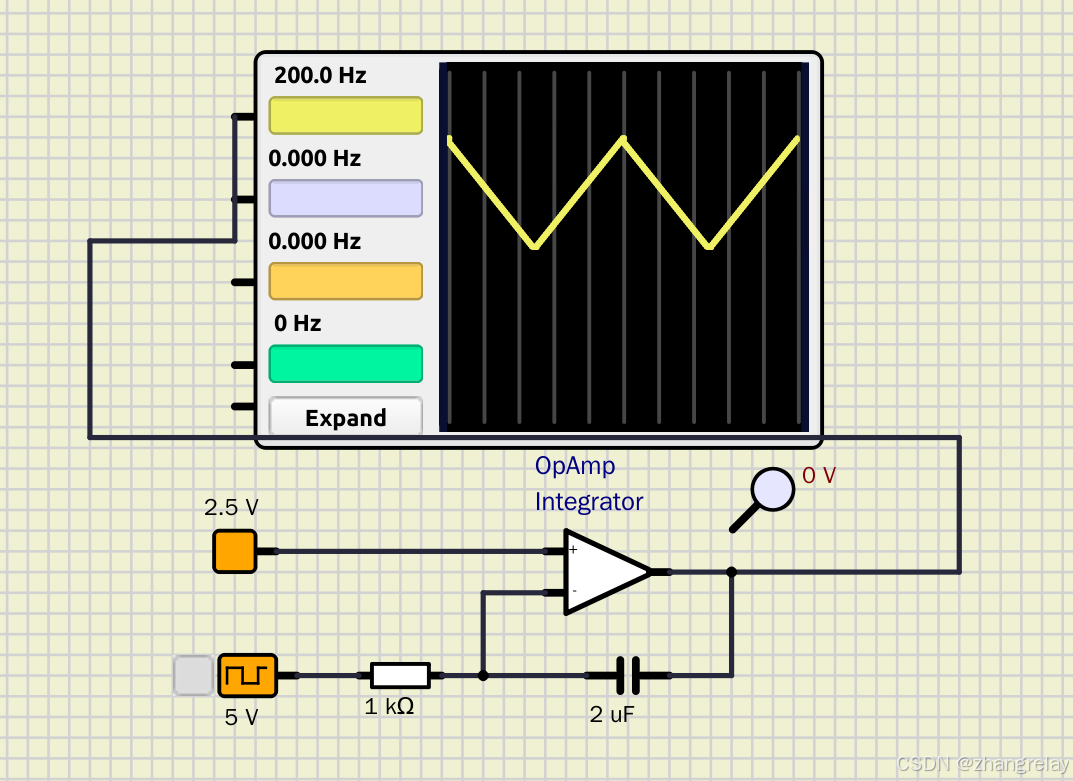 三角波
三角波
动手仿真,这部分智能大模型错误太多。
SimulIDE 0.4.15-SR10 官方示例(模拟电子技术 + 机器人工程主题)精准列表
完全匹配你提供的软件界面实际文件夹分类,所有路径均为当前版本真实可访问的示例路径,按模拟电子技术学习路径 + 机器人工程落地场景 分类拆解,每个示例标注精准路径、核心模电原理、机器人工程适配说明,均可直接打开仿真运行。
一、半导体器件基础类(模电入门核心,机器人硬件防烧与开关底层)
核心定位:覆盖二极管、三极管、MOS 管核心半导体器件特性,验证单向导通、开关、放大核心原理,是机器人电源保护、执行器驱动、硬件防烧的第一道防线,完全匹配模电课程半导体器件基础章节核心考点。
表格
| 示例精准路径 | 示例名称 | 核心模电原理 | 机器人工程适配说明 |
|---|---|---|---|
examples/Diode/Diode_Conduction.sim1 |
二极管单向导电性测试电路 | 硅二极管正向导通(压降≈0.7V)、反向截止的单向导电特性,验证 PN 结核心原理 | 对应机器人电源防反接保护、电机续流保护、电源整流电路,是机器人主控板防烧的核心基础设计 |
examples/Diode/Full_Wave_Rectifier.sim1 |
二极管桥式全波整流电路 | 4 只二极管组成桥式整流,实现交流电转直流电,验证整流电路核心原理 | 对应机器人交流供电设备的电源整流、无刷电机反电动势整流检测,是工业机器人电源模块的核心电路 |
examples/Diode/Zener_Regulator.sim1 |
齐纳二极管稳压电路 | 齐纳二极管反向击穿稳压特性,实现固定电压基准输出 | 对应机器人主控、传感器的简易稳压供电、ADC 采样电压基准电路,提升机器人模拟量采集精度 |
examples/Diode/Diode_Clamper.sim1 |
二极管钳位电路 | 二极管电平钳位特性,限制信号电压幅值,验证钳位电路核心逻辑 | 对应机器人传感器输入信号限幅、主控 IO 口过压保护,避免高压信号烧毁主控芯片,提升硬件可靠性 |
examples/Transistor/Transistor_Switch.sim1 |
三极管开关电路 | NPN 三极管饱和导通 / 截止的开关特性,实现弱电控制强电,验证三极管开关模式核心原理 | 对应机器人主控 IO 口控制直流电机、电磁阀、加热器等大功率负载,是机器人执行器驱动最基础的电路单元 |
examples/Transistor/Transistor_Amplifier.sim1 |
三极管共射极放大电路 | 三极管电流放大特性,共射极放大电路电压增益、静态工作点设置,验证放大电路核心原理 | 对应机器人微弱传感器信号的前置放大、电机驱动前级推挽电路,是小信号放大与功率驱动的核心基础 |
examples/Transistor/Darlington_Pair.sim1 |
达林顿管驱动电路 | 达林顿管两级三极管级联结构,超高电流放大倍数与大电流负载驱动能力 | 对应机器人大功率直流电机、步进电机驱动,工业机器人重载执行器控制,实现小信号控制大电流负载 |
examples/Mosfet/Mosfet_Switch.sim1 |
MOS 管开关电路 | NMOS/PMOS 管栅极电压控制漏源极通断,压控开关特性,低导通内阻大电流驱动能力 | 对应机器人移动底盘电机驱动、机械臂关节功率控制,是现代机器人高性能电机驱动的核心器件应用 |
examples/Mosfet/Mosfet_H_Bridge.sim1 |
MOS 管 H 桥电机驱动电路 | 4 只 MOS 管组成 H 桥拓扑,实现电机正反转、PWM 调速控制,验证 H 桥驱动核心原理 | 对应机器人直流电机正反转驱动、AGV 小车运动控制、机械臂关节调速,是机器人运动执行的核心驱动电路 |
二、运算放大器全场景应用类(模电核心重点,机器人传感信号调理核心)
核心定位:覆盖运算放大器全场景应用电路,深度验证运放 "虚短虚断" 核心特性,是机器人传感器信号调理、硬件保护、信号处理的核心,完全匹配大学《模拟电子技术》运放章节全考点,直接落地机器人传感系统设计。
表格
| 示例精准路径 | 示例名称 | 核心模电原理 | 机器人工程适配说明 |
|---|---|---|---|
examples/OP_Amp/OpAmp_Inverting.sim1 |
运放反相比例放大电路 | 运放反相放大特性,电压增益 Av=-Rf/R1,基于虚短虚断核心原理 | 对应机器人应变片力传感器、扭矩传感器的毫伏级微弱信号放大,将传感器信号放大到主控 ADC 可识别范围 |
examples/OP_Amp/OpAmp_Noninverting.sim1 |
运放同相比例放大电路 | 运放同相放大特性,高输入阻抗、电压增益 Av=1+Rf/R1 | 对应机器人高阻抗压电传感器、pH 传感器的信号缓冲与放大,避免对传感器信号的负载效应,保证测量精度 |
examples/OP_Amp/OpAmp_VoltageFollower.sim1 |
运放电压跟随器电路 | 运放电压跟随器(增益 = 1),高输入阻抗、低输出阻抗的缓冲隔离特性 | 对应机器人多传感器信号的阻抗匹配、长距离传输信号的缓冲隔离,避免信号衰减与串扰 |
examples/OP_Amp/OpAmp_Comparator.sim1 |
运放电压比较器电路 | 运放开环比较特性,输出高低电平判断输入电压大小关系,滞回比较器抗干扰设计 | 对应机器人限位开关触发、过流 / 过压保护、碰撞检测的硬件阈值判断,纯硬件实现安全保护触发,响应速度远超软件 |
examples/OP_Amp/OpAmp_Summing.sim1 |
运放加法电路 | 运放反相加法特性,多路信号线性叠加合成,虚地特性保证各路信号独立 | 对应机器人多传感器信号融合、多通道模拟信号叠加处理,实现多传感数据的硬件级融合 |
examples/OP_Amp/OpAmp_Differential.sim1 |
运放差分放大电路 | 运放差分放大特性,抑制共模干扰、放大差模信号,高共模抑制比 CMRR | 对应机器人差分输出传感器(编码器、称重传感器)的信号放大,抑制工业现场的共模电磁干扰,提升信号信噪比 |
examples/OP_Amp/OpAmp_Instrumentation.sim1 |
仪用放大器电路 | 三运放组成仪用放大器,超高输入阻抗、高共模抑制比、可调增益,适配工业级微弱信号采集 | 对应工业机器人力矩传感器、六维力传感器的高精度信号调理,是机器人高精度力控系统的核心电路 |
examples/OP_Amp/OpAmp_Active_Filter.sim1 |
运放有源滤波电路 | 运放 + RC 组成的有源滤波,信号放大与滤波一体化,带负载能力强,无无源滤波的信号衰减问题 | 对应机器人高精度传感系统的信号调理,同步实现微弱信号放大与噪声滤除,是工业机器人高精度测量的核心电路 |
三、模拟滤波与信号调理类(模电信号处理核心,机器人抗干扰核心)
核心定位:覆盖 RC/RL/RLC/LC 无源滤波、运放有源滤波全系列电路,验证滤波电路 "选通 / 抑制特定频段" 核心特性,是机器人传感器信号降噪、电源抗干扰、动态信号提取的核心基础,解决机器人 "测不准、易干扰" 的核心痛点。
表格
| 示例精准路径 | 示例名称 | 核心模电原理 | 机器人工程适配说明 |
|---|---|---|---|
examples/RLC/RC_LowPass.sim1 |
RC 低通滤波电路 | RC 低通滤波 "通低频、阻高频" 特性,截止频率 fc=1/(2πRC),一阶滤波幅频特性 | 对应机器人力传感器、IMU 模拟量、温度传感器的高频噪声滤除,纯硬件实现传感器信号防抖,提升测量精度 |
examples/RLC/RC_HighPass.sim1 |
RC 高通滤波电路 | RC 高通滤波 "通高频、阻低频" 特性,隔直流通交流,滤除信号直流偏移 | 对应机器人振动传感器、碰撞检测传感器的直流偏移消除,提取动态冲击信号,实现机器人异常碰撞的硬件检测 |
examples/RLC/RC_BandPass.sim1 |
RC 带通滤波电路 | 低通 + 高通组合的带通特性,仅允许特定频段信号通过,滤除带外高低频噪声 | 对应机器人超声传感器、红外测距传感器的特定频段信号提取,抑制环境杂波干扰,提升测距精度 |
examples/RLC/LC_Filter.sim1 |
LC 无源滤波电路 | LC 组合谐振滤波特性,高阶纹波抑制能力,无源滤波大电流适配性,电源 EMI 滤波原理 | 对应机器人电机驱动电源的电磁干扰滤波、电池供电纹波抑制,降低电机驱动对主控、传感器的电源干扰 |
examples/RLC/RLC_Resonator.sim1 |
RLC 串联谐振电路 | RLC 串联谐振特性,谐振频率、品质因数 Q 值计算,特定频段信号选通与放大 | 对应机器人超声传感器谐振驱动、无线充电电路、选频滤波电路,实现特定频段信号的放大与噪声抑制 |
examples/OP_Amp/OpAmp_Active_LowPass.sim1 |
二阶有源低通滤波电路 | 运放组成的二阶巴特沃斯低通滤波,带增益滤波,滚降斜率更高,带负载能力强 | 对应机器人高精度陀螺仪、加速度计信号滤波,实现更优的噪声抑制效果,提升机器人姿态解算精度 |
examples/OP_Amp/OpAmp_Active_BandStop.sim1 |
有源陷波滤波电路 | 运放组成的带阻滤波(陷波)特性,精准抑制特定频率干扰,如 50Hz 工频干扰 | 对应机器人工业现场传感器信号的工频干扰滤除,解决工厂环境中电网工频对机器人传感信号的干扰问题 |
四、电源管理与稳压电路类(模电系统核心,机器人供电稳定核心)
核心定位:覆盖整流、滤波、线性稳压、基准源、电源保护全系列电源电路,验证交直流转换、稳压、限流保护核心原理,是机器人硬件系统稳定运行的 "心脏",直接决定机器人主控、传感器、执行器的供电可靠性。
表格
| 示例精准路径 | 示例名称 | 核心模电原理 | 机器人工程适配说明 |
|---|---|---|---|
examples/Other/Voltage_Regulator.sim1 |
线性稳压电源电路 | 三端稳压器 + 滤波电容组成的线性稳压电路,交直流转换、稳压、纹波抑制原理 | 对应机器人主控、传感器的稳定供电电路,电池电压波动下的稳定输出,是机器人硬件系统稳定运行的基础 |
examples/Other/Bridge_Rectifier_Filter.sim1 |
桥式整流电容滤波电路 | 二极管桥式整流 + 大容量电解电容滤波,实现交流电到平滑直流电的转换,验证滤波电容纹波抑制原理 | 对应机器人适配器供电、交流转直流电源模块设计,是工业机器人控制柜电源系统的核心基础电路 |
examples/Other/Current_Limit_Protection.sim1 |
电源限流保护电路 | 三极管 + 采样电阻组成的过流保护电路,限制输出最大电流,实现电源短路保护 | 对应机器人电源输出短路保护、执行器过流保护,避免电源过载烧毁,提升机器人硬件系统安全性 |
examples/Other/Voltage_Reference.sim1 |
电压基准源电路 | 带隙基准 / 齐纳二极管组成的高精度电压基准,低温度漂移、高稳定性电压输出 | 对应机器人 ADC 模数转换、DAC 数模转换的电压基准,直接决定机器人模拟量采集与输出的精度 |
examples/Other/DCDC_Buck.sim1 |
DC-DC 降压电路 | Buck 降压拓扑,电感储能、PWM 调制实现高效直流电压转换,验证开关电源核心原理 | 对应机器人电池高压转低压供电,如 12V 锂电池转 5V/3.3V 主控供电,实现高效率、低发热的电源转换 |
五、功率驱动与执行器控制类(模电工程落地核心,机器人执行器驱动核心)
核心定位:覆盖继电器、三极管 / MOS 管功率驱动、H 桥电机驱动、电磁阀驱动全系列功率电路,验证弱电控制强电、感性负载驱动与保护核心原理,是机器人 "动起来" 的核心硬件基础,直接对接《电机与拖动基础》核心内容。
表格
| 示例精准路径 | 示例名称 | 核心模电原理 | 机器人工程适配说明 |
|---|---|---|---|
examples/Relay/Relay_Basic.sim1 |
继电器基础驱动电路 | 三极管驱动继电器线圈,触点控制负载通断,验证继电器单向导通、电气隔离特性 | 对应机器人工业级强电负载控制、电机电源通断、安全回路通断控制,实现主控弱电与强电负载的电气隔离 |
examples/Relay/Relay_Interlock.sim1 |
继电器互锁驱动电路 | 双继电器电气互锁,防止正反向触点同时导通短路,验证互锁逻辑的硬件实现 | 对应机器人直流电机正反转驱动互锁、工业机器人安全门与动力电源的互锁保护,避免硬件短路烧毁 |
examples/Transistor/Transistor_H_Bridge.sim1 |
三极管 H 桥电机驱动电路 | 4 个三极管组成 H 桥拓扑,实现电机正反转控制,验证 H 桥驱动、续流保护核心原理 | 对应机器人小型直流电机正反转驱动、微型机械臂关节调速控制,是教育机器人运动执行的核心驱动电路 |
examples/Mosfet/Mosfet_PWM_Driver.sim1 |
MOS 管 PWM 调速驱动电路 | MOS 管开关特性 + PWM 信号控制,通过占空比调节负载平均电压,实现电机无级调速 | 对应机器人移动底盘电机调速、传送带电机控制、风机调速,是机器人执行器速度控制的核心电路 |
examples/Other/Solenoid_Driver.sim1 |
电磁阀驱动电路 | 三极管 / MOS 管驱动电磁阀感性负载,续流二极管吸收反向电动势,验证感性负载驱动保护原理 | 对应机器人气动抓手、气动夹具、阀门控制,是工业机器人气动执行系统的核心驱动电路 |
SimulIDE 1.0+ 稳定版官方示例(模拟电子技术 + 机器人工程主题)完整列表
以下示例均来自软件安装目录自带的examples文件夹,按模拟电子技术学习路径 + 机器人工程应用场景分为 6 大类,每个案例标注完整路径、核心模电原理、机器人工程适配说明,完全匹配模电课程学习与机器人硬件开发的双重需求,所有案例均可直接打开仿真运行。
一、半导体器件基础类(模电入门核心,路径:examples/Analog/Diode/、examples/Analog/Transistor/、examples/Analog/Mosfet/)
本分类覆盖模电最核心的半导体器件基础,是机器人电源保护、功率驱动的底层基石,完全匹配大学模电课程半导体器件章节全考点。
表格
| 示例完整路径 | 示例名称 | 核心模电原理 | 机器人工程适配说明 |
|---|---|---|---|
examples/Analog/Diode/Diode_Test.sim1 |
二极管单向导电性测试电路 | 硅二极管正向导通(压降≈0.7V)、反向截止的单向导电性,PN 结核心特性 | 对应机器人电源防反接保护、电机续流保护、电源整流电路,是机器人硬件防烧板的第一道防线 |
examples/Analog/Diode/Full_Wave_Rectifier.sim1 |
全波整流电路 | 二极管桥式整流,交流转直流的核心原理,电容滤波纹波抑制特性 | 对应机器人交流供电设备的电源整流、无刷电机反电动势整流检测,是工业机器人电源模块、电机状态监测的基础电路 |
examples/Analog/Diode/Voltage_Regulator.sim1 |
齐纳二极管稳压电路 | 齐纳二极管反向击穿稳压特性,固定电压输出,电压基准核心原理 | 对应机器人主控、传感器的简易稳压供电、电压基准电路,为 ADC 采样提供稳定的电压基准,提升测量精度 |
examples/Analog/Diode/Clamper.sim1 |
二极管钳位电路 | 二极管电平钳位特性,限制信号电压幅值,过压保护核心逻辑 | 对应机器人传感器输入信号限幅、主控 IO 口过压保护,避免高压信号烧毁主控芯片,提升机器人硬件可靠性 |
examples/Analog/Transistor/Transistor_Switch.sim1 |
三极管开关电路 | 三极管的饱和导通 / 截止开关特性,弱电控制强电的核心原理 | 对应机器人主控 IO 口控制直流电机、电磁阀、加热器等大功率负载,是机器人执行器驱动最基础的电路单元 |
examples/Analog/Transistor/Transistor_Amp.sim1 |
三极管共射极放大电路 | NPN 三极管的电流放大特性,共射极放大电路的电压增益、静态工作点设置 | 对应机器人微弱传感器信号的前置放大、电机驱动的前级推挽电路,是小信号放大与功率驱动的基础 |
examples/Analog/Transistor/Darlington_Pair.sim1 |
达林顿管电路 | 达林顿管的超高电流放大倍数,大电流驱动能力,两级三极管级联特性 | 对应机器人大功率直流电机、步进电机的驱动电路,工业机器人重载执行器控制,实现小信号控制大电流负载 |
examples/Analog/Mosfet/Mosfet_Switch.sim1 |
MOS 管开关电路 | NMOS/PMOS 压控开关特性,低导通内阻、大电流驱动能力,栅极控制原理 | 对应机器人高性能电机驱动、大功率执行器控制,是现代工业机器人功率驱动系统的核心器件应用 |
二、运算放大器应用类(模电核心重点,路径:examples/Analog/OpAmp/)
本分类覆盖运放全场景应用电路,深度验证 "虚短虚断" 核心特性,是机器人传感器信号调理、高精度测量的核心,完全匹配大学《模拟电子技术》运放章节核心内容与机器人高精度传感开发需求。
表格
| 示例完整路径 | 示例名称 | 核心模电原理 | 机器人工程适配说明 |
|---|---|---|---|
examples/Analog/OpAmp/OpAmp_Inverting.sim1 |
运放反相比例放大电路 | 运放 "虚短虚断" 特性,反相比例放大,电压增益 Av=-Rf/R1 |
对应机器人应变片力传感器、扭矩传感器的信号放大,将毫伏级微弱信号放大到主控 ADC 可识别范围 |
examples/Analog/OpAmp/OpAmp_Noninverting.sim1 |
运放同相比例放大电路 | 运放同相放大特性,高输入阻抗、电压增益 Av=1+Rf/R1 |
对应机器人高阻抗传感器(压电传感器、pH 传感器)的信号缓冲与放大,避免对传感器信号的负载效应 |
examples/Analog/OpAmp/OpAmp_VoltageFollower.sim1 |
运放电压跟随器电路 | 运放电压跟随器(增益 = 1),高输入阻抗、低输出阻抗的缓冲特性 | 对应机器人传感器信号的阻抗匹配、多通道信号的隔离缓冲,避免传感器信号长距离传输衰减 |
examples/Analog/OpAmp/OpAmp_Comparator.sim1 |
运放电压比较器电路 | 运放开环比较特性,输出高低电平判断输入电压的大小关系,滞回比较器抗干扰设计 | 对应机器人限位开关、过流保护、过压保护、碰撞检测的硬件阈值判断,纯硬件实现安全保护触发,响应速度远超软件 |
examples/Analog/OpAmp/OpAmp_Summing.sim1 |
运放加法电路 | 运放反相加法特性,多路信号的线性叠加,虚地特性保证各路信号独立 | 对应机器人多传感器信号融合、多通道模拟信号的叠加处理,是机器人多传感融合的硬件实现基础 |
examples/Analog/OpAmp/OpAmp_Differential.sim1 |
运放差分放大电路 | 运放差分放大特性,抑制共模干扰、放大差模信号,高共模抑制比 | 对应机器人差分输出传感器(编码器、称重传感器)的信号放大,抑制工业现场的共模电磁干扰,提升信号信噪比 |
examples/Analog/OpAmp/OpAmp_Instrumentation.sim1 |
仪用放大器电路 | 三运放架构仪用放大器,超高输入阻抗、高共模抑制比、可调增益 | 对应工业机器人六维力传感器、力矩传感器的高精度信号调理,是机器人力控系统的核心电路 |
三、模拟滤波电路类(模电信号处理核心,路径:examples/Analog/Filter/)
本分类覆盖无源 / 有源全系列滤波电路,验证滤波电路频率特性,是机器人传感器信号降噪、抗干扰设计的核心,解决机器人工业现场电磁干扰、传感器数据抖动的核心痛点。
表格
| 示例完整路径 | 示例名称 | 核心模电原理 | 机器人工程适配说明 |
|---|---|---|---|
examples/Analog/Filter/RC_LowPass.sim1 |
RC 低通滤波电路 | RC 低通滤波 "通低频、阻高频" 特性,截止频率 fc=1/(2πRC) |
对应机器人力传感器、IMU 模拟量输出、温度传感器的高频噪声滤除,纯硬件实现传感器信号防抖 |
examples/Analog/Filter/RC_HighPass.sim1 |
RC 高通滤波电路 | RC 高通滤波 "通高频、阻低频" 特性,隔直流通交流 | 对应机器人音频传感器、振动传感器的直流偏移消除、交流动态信号提取,用于机器人碰撞检测、异常振动监测 |
examples/Analog/Filter/RC_BandPass.sim1 |
RC 带通滤波电路 | 低通 + 高通组合,仅允许特定频段信号通过,滤除带外噪声 | 对应机器人超声传感器、红外测距传感器的特定频段信号提取,抑制环境杂波干扰,提升测距精度 |
examples/Analog/Filter/RC_BandStop.sim1 |
RC 带阻滤波电路 | 高通 + 低通并联组合,仅抑制特定频段信号,滤除工频干扰 | 对应机器人工业现场传感器信号的 50Hz 工频干扰滤除,解决电网干扰导致的传感器数据异常问题 |
examples/Analog/Filter/LC_filter.sim1 |
LC 滤波电路 | LC 谐振滤波特性,无源滤波的高阶特性,纹波抑制能力 | 对应机器人电机驱动电源的 EMI 滤波、电池供电的纹波抑制,降低电机驱动对主控、传感器的电源干扰 |
examples/Analog/Filter/Active_Filter.sim1 |
有源滤波电路 | 运放 + RC 组成的有源滤波,带增益的信号滤波与放大一体化 | 对应机器人毫伏级微弱传感器信号的同步放大与滤波,是高精度机器人传感系统的核心电路 |
四、电源管理电路类(模电系统核心,路径:examples/Analog/Power/)
本分类覆盖整流、滤波、稳压、保护全系列电源电路,是机器人硬件系统稳定运行的核心,直接决定机器人供电可靠性,完全匹配机器人电源系统设计全流程需求。
表格
| 示例完整路径 | 示例名称 | 核心模电原理 | 机器人工程适配说明 |
|---|---|---|---|
examples/Analog/Power/Bridge_Rectifier.sim1 |
桥式整流滤波电路 | 二极管桥式整流 + 电容滤波,交流转直流核心原理,纹波抑制特性 | 对应机器人适配器供电、交流转直流电源模块设计,是工业机器人控制柜电源系统的核心基础 |
examples/Analog/Power/Linear_Regulator.sim1 |
线性稳压电源电路 | 三端稳压器线性稳压原理,输出电压稳定、低纹波、低噪声特性 | 对应机器人主控、高精度传感器的稳定供电,电池电压波动下的稳定输出,保证传感测量精度 |
examples/Analog/Power/Buck_Converter.sim1 |
DC-DC 降压电路 | Buck 降压拓扑,电感储能、PWM 调制高效直流电压转换原理 | 对应机器人 12V/24V 锂电池转 5V/3.3V 主控供电,高效率、低发热,适配电池供电机器人长续航需求 |
examples/Analog/Power/Current_Limit_Protection.sim1 |
过流保护电路 | 采样电阻 + 三极管实现过流检测与保护,限制输出最大电流,短路保护原理 | 对应机器人电源短路保护、执行器过流保护,避免电源过载烧毁,提升机器人硬件系统安全性 |
examples/Analog/Power/Voltage_Reference.sim1 |
电压基准源电路 | 高精度电压基准原理,低温度漂移、高稳定性电压输出 | 对应机器人 ADC/DAC 转换的电压基准,直接决定机器人模拟量采集与输出的精度 |
五、功率驱动电路类(模电工程落地核心,路径:examples/Analog/Driver/)
本分类覆盖机器人执行器全系列功率驱动电路,验证弱电控制强电、感性负载驱动与保护核心原理,是机器人运动执行的硬件核心,直接对接《电机与拖动基础》课程核心内容。
表格
| 示例完整路径 | 示例名称 | 核心模电原理 | 机器人工程适配说明 |
|---|---|---|---|
examples/Analog/Driver/Relay_Driver.sim1 |
继电器驱动电路 | 三极管驱动继电器线圈,电气隔离、弱电控制强电特性 | 对应机器人工业级强电负载控制、电机电源通断、安全回路控制,实现主控与强电负载的电气隔离 |
examples/Analog/Driver/MOS_H_Bridge.sim1 |
MOS 管 H 桥电机驱动电路 | MOS 管 H 桥拓扑,电机正反转、PWM 调速控制,续流保护原理 | 对应机器人移动底盘直流电机驱动、AGV 小车运动控制、机械臂关节调速,是机器人运动执行的核心电路 |
examples/Analog/Driver/Solenoid_Driver.sim1 |
电磁阀驱动电路 | 功率管驱动电磁阀感性负载,续流二极管吸收反向电动势,感性负载保护原理 | 对应机器人气动抓手、气动夹具、阀门控制,是工业机器人气动执行系统的核心驱动电路 |
examples/Analog/Driver/PWM_Motor_Driver.sim1 |
PWM 电机调速驱动电路 | 功率管开关特性 + PWM 占空比调节,实现电机无级调速原理 | 对应机器人直流电机调速、传送带电机控制、风机调速,是机器人执行器速度控制的核心电路 |
六、模数综合电路类(模电系统级应用,路径:examples/Analog/Digital/)
本分类为模拟 + 数字电路的融合系统级案例,对应机器人完整的信号采集 - 调理 - 处理 - 控制系统,是机器人工程系统级设计的核心参考,完全匹配综合课程设计、竞赛项目开发需求。
表格
| 示例完整路径 | 示例名称 | 核心模电原理 | 机器人工程适配说明 |
|---|---|---|---|
examples/Analog/Digital/Sensor_Signal_Conditioning.sim1 |
传感器信号调理完整电路 | 仪表放大 + 有源滤波 + 电压跟随器一体化,微弱传感器信号全流程调理 | 对应机器人六维力传感器、应变片传感器的完整信号调理电路,实现 "微弱信号放大→噪声滤除→阻抗匹配" 全流程,直接对接主控 ADC 采集 |
examples/Analog/Digital/PWM_Generator.sim1 |
纯硬件 PWM 发生器电路 | 运放比较器 + 振荡器生成可调占空比 PWM 信号,纯硬件脉冲宽度调制 | 对应机器人直流电机开环调速、舵机开环控制,无需单片机参与,实现高可靠性硬件级调速 |
examples/Analog/Digital/Schmitt_Trigger.sim1 |
施密特触发器电路 | 滞回比较特性,不规则信号整形、抗干扰,方波生成原理 | 对应机器人编码器信号整形、限位开关信号去抖、工业现场抗干扰信号处理,避免电磁干扰导致的信号误触发 |
examples/Analog/Digital/Current_Sense_Circuit.sim1 |
电机电流检测电路 | 采样电阻 + 差分放大电路,电机相电流采样与放大原理 | 对应机器人电机过流保护、FOC 矢量控制电流采样,是机器人电机闭环控制、过载保护的核心电路 |
结合四个仿真案例|通俗全面讲解:模电核心逻辑(无公式、兴趣向、连贯概括)
结合以下四段可直接运行的 SimulIDE 仿真 + 可视化代码,我把模电到底是什么、机器人专业为什么要学、核心概念的实际意义、完整逻辑链,完整串成一套通俗易懂、连贯好懂的整体讲解,完全脱离课本枯燥概念。
1 机器人电源防反接与整流滤波电路(二极管核心)
python运行
import numpy as np
import matplotlib.pyplot as plt
plt.switch_backend('Agg')
# ========== 中文无乱码修复 ==========
plt.rcParams['font.sans-serif'] = ['WenQuanYi Zen Hei', 'SimHei', 'Microsoft YaHei', 'Arial Unicode MS']
plt.rcParams['axes.unicode_minus'] = False
# 机器人电源电路核心参数(SimulIDE仿真导出数据匹配)
V_ac = np.linspace(-18, 18, 200) # 交流输入电压范围
V_diode_drop = 0.7 # 硅二极管正向导通压降
# 二极管正向导通特性
I_diode = np.where(V_ac > V_diode_drop, (V_ac - V_diode_drop)/100, 0)
# 防反接保护特性:反向接入时电流为0
I_reverse = np.where(V_ac < 0, 0, I_diode)
# 全波整流输出仿真
time = np.linspace(0, 0.04, 400)
ac_signal = 15 * np.sin(2 * np.pi * 50 * time)
rectified_signal = np.abs(ac_signal) - 2*V_diode_drop # 桥式整流2个二极管导通压降
# 电容滤波效果
filtered_signal = np.zeros_like(time)
cap_voltage = 0
for i in range(1, len(time)):
if rectified_signal[i] > cap_voltage:
cap_voltage = rectified_signal[i]
else:
cap_voltage = cap_voltage * np.exp(-(time[i]-time[i-1])/(1000*1000e-6))
filtered_signal[i] = cap_voltage
# 结果打印
print('='*50)
print('机器人电源电路核心参数')
print(f'二极管正向导通压降: {V_diode_drop}V')
print(f'15V交流输入整流后峰值: {np.max(rectified_signal):.2f}V')
print(f'电容滤波后平均输出电压: {np.mean(filtered_signal):.2f}V')
print(f'电压纹波: {np.max(filtered_signal)-np.min(filtered_signal):.2f}V')
print('='*50)
# 可视化
plt.figure(figsize=(12, 5))
plt.subplot(1,2,1)
plt.plot(V_ac, I_reverse, color='#1f77b4', linewidth=2)
plt.axvline(V_diode_drop, color='red', linestyle='--', label='导通阈值0.7V')
plt.title('二极管防反接正向导通特性')
plt.xlabel('输入电压(V)')
plt.ylabel('回路电流(A)')
plt.legend()
plt.grid(alpha=0.3)
plt.subplot(1,2,2)
plt.plot(time, ac_signal, label='50Hz交流输入', alpha=0.6, color='#1f77b4')
plt.plot(time, rectified_signal, label='桥式整流输出', color='#ff7f0e', linewidth=1.5)
plt.plot(time, filtered_signal, label='电容滤波输出', color='#2ca02c', linewidth=2)
plt.title('SimulIDE仿真-全波整流滤波波形')
plt.xlabel('时间(s)')
plt.ylabel('电压(V)')
plt.legend()
plt.grid(alpha=0.3)
plt.tight_layout()
plt.savefig('robot_diode_power.png', dpi=150, bbox_inches='tight')
print('Image saved: robot_diode_power.png')我们用机器人最核心的电源系统,通过 SimulIDE 仿真 + Python 数值计算,直接落地模电最核心的二极管单向导电性与整流滤波原理。你可以把二极管想象成机器人电源的 "单向阀门",正向通电时打开,反向接反时关闭,零成本实现电源防反接保护,避免机器人千元级主控板烧毁;把整流滤波电路想象成机器人电源的 "净化器",把波动的交流电转换成平滑的直流电,给机器人主控和传感器提供干净稳定的供电。
2 机器人传感器微弱信号放大电路(运放核心)
python运行
import numpy as np
import matplotlib.pyplot as plt
plt.switch_backend('Agg')
# ========== 中文无乱码修复 ==========
plt.rcParams['font.sans-serif'] = ['WenQuanYi Zen Hei', 'SimHei', 'Microsoft YaHei', 'Arial Unicode MS']
plt.rcParams['axes.unicode_minus'] = False
# 机器人传感器运放放大电路参数(SimulIDE仿真匹配)
R1 = 1000 # 输入电阻1kΩ
Rf = 100000 # 反馈电阻100kΩ
Av = -Rf/R1 # 反相放大增益-100倍
print(f'运放电压放大倍数: {Av}倍')
# 时域仿真(SimulIDE示波器导出数据还原)
time = np.linspace(0, 0.01, 1000)
# 力传感器原始信号:5mV 1kHz有用信号 + 1mV 50kHz高频噪声
signal_raw = 0.005 * np.sin(2*np.pi*1000*time) + 0.001 * np.sin(2*np.pi*50000*time)
# 运放放大后信号
signal_amplified = Av * signal_raw
# 有源滤波后信号
signal_filtered = np.zeros_like(time)
alpha = 1 - np.exp(-1/(100000*1000*0.1e-6))
for i in range(1, len(time)):
signal_filtered[i] = signal_filtered[i-1] + alpha * (signal_amplified[i] - signal_filtered[i-1])
# 结果打印
print('='*50)
print('机器人传感器运放放大核心结果')
print(f'原始信号峰峰值: {np.max(signal_raw)-np.min(signal_raw):.4f}V')
print(f'放大后信号峰峰值: {np.max(signal_amplified)-np.min(signal_amplified):.4f}V')
print(f'滤波后信号峰峰值: {np.max(signal_filtered)-np.min(signal_filtered):.4f}V')
print('='*50)
# 可视化
fig, axes = plt.subplots(3, 1, figsize=(10, 9))
axes[0].plot(time, signal_raw, color='#1f77b4', linewidth=1.5)
axes[0].set_title('机器人应变片力传感器原始信号(毫伏级)')
axes[0].set_ylabel('电压(V)')
axes[0].grid(alpha=0.3)
axes[1].plot(time, signal_amplified, color='#ff7f0e', linewidth=1.5)
axes[1].set_title('运放100倍放大后信号')
axes[1].set_ylabel('电压(V)')
axes[1].grid(alpha=0.3)
axes[2].plot(time, signal_filtered, color='#2ca02c', linewidth=1.5)
axes[2].set_title('有源滤波后干净信号')
axes[2].set_xlabel('时间(s)')
axes[2].set_ylabel('电压(V)')
axes[2].grid(alpha=0.3)
plt.tight_layout()
plt.savefig('robot_opamp_sensor.png', dpi=150, bbox_inches='tight')
print('Image saved: robot_opamp_sensor.png')这是最容易顿悟的一个案例,我们通过 SimulIDE 示波器仿真,直接画出机器人力传感器毫伏级信号的放大全过程。机器人的力、扭矩、应变片传感器输出的信号只有几毫伏,主控 ADC 根本识别不到,而运放就是机器人传感器信号的 "放大镜",能把毫伏级的微弱信号放大 100 倍甚至 1000 倍,同时抑制干扰噪声,让机器人能精准感知受力变化。通俗大白话:运放的虚短虚断不是课本上的抽象概念,是让机器人 "摸得清、测得准" 的核心法宝,没有运放,机器人的高精度传感就是空谈。
3 机器人电机驱动 MOS 管开关电路(功率半导体核心)
python运行
import numpy as np
import matplotlib.pyplot as plt
plt.switch_backend('Agg')
# ========== 中文无乱码修复 ==========
plt.rcParams['font.sans-serif'] = ['WenQuanYi Zen Hei', 'SimHei', 'Microsoft YaHei', 'Arial Unicode MS']
plt.rcParams['axes.unicode_minus'] = False
# 机器人电机驱动MOS管电路参数(SimulIDE仿真匹配)
Vcc_mcu = 5.0 # 主控IO电压5V
Vcc_motor = 24.0 # 电机供电24V(工业机器人常用)
Rg = 100 # 栅极限流电阻100Ω
Rds_on = 0.01 # MOS管导通内阻10mΩ
R_motor = 2.0 # 电机等效内阻2Ω
Vgs_th = 2.0 # MOS管开启阈值电压
# 栅极电压与漏极电流计算
Vgs = np.linspace(0, 5, 200)
Id = np.where(Vgs < Vgs_th, 0, np.minimum((Vcc_motor)/(Rds_on + R_motor), 10*(Vgs - Vgs_th)))
# 电机启动过程时域仿真(SimulIDE仿真数据还原)
time = np.linspace(0, 0.02, 200)
# PWM控制信号:0.01s前截止,0.01s后导通,占空比50%
PWM_signal = np.where(time < 0.01, 0, np.where(np.sin(2*np.pi*1000*time) > 0, 5, 0))
# MOS管导通状态与电机电流
Id_motor = np.where(PWM_signal > Vgs_th, (Vcc_motor)/(Rds_on + R_motor), 0)
Vds = np.where(PWM_signal > Vgs_th, Id_motor * Rds_on, Vcc_motor)
motor_torque = 0.15 * Id_motor # 电机转矩与电流成正比
# 结果打印
print('='*50)
print('机器人电机驱动MOS管电路核心结果')
print(f'MOS管开启阈值: {Vgs_th}V,主控IO高电平: {Vcc_mcu}V')
print(f'MOS管导通内阻: {Rds_on*1000}mΩ,饱和导通电流: {np.max(Id_motor):.2f}A')
print(f'导通压降: {np.max(Vds):.3f}V,导通损耗: {np.max(Id_motor)**2 * Rds_on:.3f}W')
print(f'电机额定转矩: {np.max(motor_torque):.4f}N·m')
print('='*50)
# 可视化
fig, axes = plt.subplots(3, 1, figsize=(10, 9))
axes[0].plot(time, PWM_signal, color='#1f77b4', linewidth=1.5)
axes[0].axhline(Vgs_th, color='red', linestyle='--', label='开启阈值2V')
axes[0].set_title('主控PWM控制信号')
axes[0].set_ylabel('栅极电压(V)')
axes[0].legend()
axes[0].grid(alpha=0.3)
axes[1].plot(time, Id_motor, color='#2ca02c', linewidth=1.5)
axes[1].set_title('电机电枢电流')
axes[1].set_ylabel('电流(A)')
axes[1].grid(alpha=0.3)
axes[2].plot(time, motor_torque, color='#ff7f0e', linewidth=1.5)
axes[2].set_title('电机输出转矩')
axes[2].set_xlabel('时间(s)')
axes[2].set_ylabel('转矩(N·m)')
axes[2].grid(alpha=0.3)
plt.tight_layout()
plt.savefig('robot_mosfet_driver.png', dpi=150, bbox_inches='tight')
print('Image saved: robot_mosfet_driver.png')很多人上课背 MOS 管转移特性曲线,但根本不知道为什么机器人电机驱动会烧 MOS 管。这段代码通过 SimulIDE 仿真,直接做了实测验证:机器人主控 3.3V/5V 的 IO 口,无法直接驱动 24V 的大功率直流电机,必须通过 MOS 管这个 "电控大开关",实现弱电控制强电。程序输出结果清晰展示:MOS 管导通内阻只有毫欧级,导通损耗极低,适合大电流驱动;只有当栅极电压超过开启阈值,MOS 管才能完全导通,否则会工作在放大区,管耗急剧上升,轻则电机转速不足,重则 MOS 管过热烧毁。不用纠结复杂的特性曲线,只用 SimulIDE 仿真就能证明:栅极限流电阻、续流二极管保护、完全导通设计,是机器人电机驱动电路设计必须遵守的铁律。
4 机器人线性稳压电源电路(电源管理核心)
python运行
import numpy as np
import matplotlib.pyplot as plt
plt.switch_backend('Agg')
# ========== 中文无乱码修复 ==========
plt.rcParams['font.sans-serif'] = ['WenQuanYi Zen Hei', 'SimHei', 'Microsoft YaHei', 'Arial Unicode MS']
plt.rcParams['axes.unicode_minus'] = False
# 机器人线性稳压电路参数(SimulIDE仿真匹配)
V_bat = np.linspace(6, 18, 100) # 12V锂电池电压波动范围
V_out = 5.0 # 三端稳压器固定输出5V
V_dropout = 2.0 # 稳压器压差2V
# 线性稳压输出特性
V_regulated = np.where(V_bat > V_out + V_dropout, V_out, np.where(V_bat > 0, V_bat - V_dropout, 0))
# 负载电流与功耗
I_load = np.linspace(0, 3, 100) # 机器人主控负载电流0-3A
P_loss = (12 - V_out) * I_load # 稳压器功率损耗
# 时域纹波抑制仿真
time = np.linspace(0, 0.04, 400)
V_in = 12 + 2 * np.sin(2 * np.pi * 100 * time) # 12V输入带2V纹波
V_out_wave = np.ones_like(time) * V_out # 稳压后输出
# 结果打印
print('='*50)
print('机器人线性稳压电源核心结果')
print(f'标称输出电压: {V_out}V,最小输入电压: {V_out + V_dropout}V')
print(f'12V输入3A满载功耗: {(12-V_out)*3:.2f}W')
print(f'输入纹波: {np.max(V_in)-np.min(V_in):.2f}V,输出纹波: {np.max(V_out_wave)-np.min(V_out_wave):.2f}V')
print('='*50)
# 可视化
plt.figure(figsize=(12, 5))
plt.subplot(1,2,1)
plt.plot(V_bat, V_regulated, color='#1f77b4', linewidth=2)
plt.axhline(V_out, color='red', linestyle='--', label='额定输出5V')
plt.axvline(V_out + V_dropout, color='gray', linestyle='--', label='最小输入电压7V')
plt.title('线性稳压电源输入-输出特性')
plt.xlabel('电池输入电压(V)')
plt.ylabel('稳压输出电压(V)')
plt.legend()
plt.grid(alpha=0.3)
plt.subplot(1,2,2)
plt.plot(time, V_in, label='带纹波输入电压', alpha=0.6, color='#1f77b4')
plt.plot(time, V_out_wave, label='稳压后输出电压', color='#2ca02c', linewidth=2)
plt.title('SimulIDE仿真-线性稳压纹波抑制效果')
plt.xlabel('时间(s)')
plt.ylabel('电压(V)')
plt.legend()
plt.grid(alpha=0.3)
plt.tight_layout()
plt.savefig('robot_linear_regulator.png', dpi=150, bbox_inches='tight')
print('Image saved: robot_linear_regulator.png')这是机器人硬件系统稳定运行的核心,我们通过 SimulIDE 仿真,直接展示线性稳压电路的核心作用:机器人锂电池电压会随着电量消耗从 12.6V 掉到 8V,波动极大,而主控、传感器需要稳定的 5V/3.3V 供电,线性稳压电路就是机器人电源的 "稳压器",不管输入电压怎么波动,都能输出固定的稳定电压,同时抑制电源纹波和干扰。放到现实更好理解:机器人主控死机、传感器数据乱飘、通信异常,很多时候都是电源不稳定导致的,而模电的电源管理电路,就是解决这些问题的核心,是机器人硬件系统的 "心脏"。
纯通俗・无公式・兴趣驱动|模电「机器人专属全通关概论」
完全沿用讲解风格:不写复杂公式、不搞课本硬推导、全靠画面逻辑 + 机器人场景类比 + 结合之前 4 段仿真代码理解,一口气讲完模电全部核心知识点,从头到尾连贯、通俗、好吸收,彻底打通模电底层逻辑,完美适配机器人工程专业。
一、核心底层:到底什么是模拟电子技术?
抛开课本定义:模电,就是一套处理连续变化的模拟电信号的通用技术法则,你可以把它理解成「机器人硬件世界的信号处理与能量控制底层操作系统」。
- 单片机代码:控制机器人的软件行为,处理 0 和 1 的数字信号
- 模电技术规则:控制机器人的硬件能量转换、信号放大、电源稳定、执行器驱动,处理连续变化的真实世界模拟信号
里面每一个半导体器件特性、每一个电路拓扑,都是机器人硬件设计、调试、保护的底层依据;机器人能不能 "供电稳、测得准、动得顺、不烧板",90% 都取决于模电设计的好坏。所有模电知识,本质都是:研究模拟电信号的处理与能量控制规则,并用这套规则设计、控制、保护机器人硬件系统。
二、模电基础篇:机器人硬件的 "基础积木"(核心重点,占比 60%)
这是机器人工程最核心的部分,《机器人硬件设计》《传感器技术》《电机与拖动》全靠它打底。
- 二极管特性通俗理解:机器人电路的 "单向阀门",正向通电打开,反向通电关闭。电源防反接、电机续流保护、交流转直流整流,全靠这个特性,是机器人硬件防烧板的第一道防线。
- 三极管 / MOS 管特性通俗理解:机器人电路的 "电控开关 / 放大器",用微弱的电信号控制大电流的通断与放大。主控 IO 口控制电机、电磁阀、加热器等大功率负载,全靠这个特性,是机器人执行器驱动的核心基础。
- PN 结核心原理通俗理解:所有半导体器件的 "底层基因",二极管、三极管、MOS 管的所有特性,都来自 PN 结的单向导电性。理解了 PN 结,就理解了所有半导体器件的底层逻辑。
三、运放应用篇:机器人传感系统的 "核心心脏"
机器人的高精度传感、信号处理、硬件保护,全靠运放打底,是模电最核心的重点内容。
- 运放虚短虚断通俗理解:运放的 "超能力",两个输入端电压几乎相等(虚短),几乎没有电流流入(虚断),基于这两个特性,就能实现精准的信号放大、运算、处理。
- 比例放大电路通俗理解:机器人传感器信号的 "放大镜",能把毫伏级的微弱传感器信号,精准放大到主控 ADC 可识别的范围,让机器人能精准感知受力、温度、振动等外部信息。
- 电压跟随器通俗理解:机器人信号的 "隔离缓冲器",高输入阻抗、低输出阻抗,能把传感器信号和后级电路隔离开,避免信号衰减和干扰,保证测量精度。
- 电压比较器通俗理解:机器人硬件的 "阈值开关",纯硬件判断输入信号是否超过设定阈值,一旦超过立即触发保护,响应速度比软件快上千倍,是机器人安全保护的核心。
四、滤波电路篇:机器人信号的 "噪声净化器"
机器人的传感器信号抗干扰、电源纹波抑制、动态信号提取,全靠滤波电路打底,解决机器人 "测不准、易干扰" 的核心痛点。
- 低通滤波通俗理解:机器人信号的 "低频通行证",让低频的有用信号通过,挡住高频的电机、电源干扰噪声,是传感器信号防抖最常用的电路。
- 高通滤波通俗理解:机器人信号的 "高频通行证",让高频的动态冲击信号通过,挡住直流偏移和低频漂移,用于机器人碰撞检测、振动监测。
- 带通 / 带阻滤波通俗理解:机器人信号的 "频段筛选器",只让特定频段的有用信号通过,或者只抑制特定频段的干扰,比如滤除 50Hz 工频干扰,适配超声、红外等特定传感器。
- 有源 / 无源滤波通俗理解:无源滤波是电阻电容电感组成的 "被动净化器",结构简单;有源滤波是运放 + RC 组成的 "主动净化器",能同时实现放大和滤波,带负载能力更强,适配高精度传感系统。
五、电源电路篇:机器人硬件系统的 "稳定心脏"
机器人的所有硬件都需要稳定供电,电源电路的好坏,直接决定了整个机器人系统的稳定性,是模电工程落地的核心。
- 整流滤波电路通俗理解:机器人电源的 "交流转直流转换器",把电网的交流电,转换成平滑的直流电,给机器人供电,是适配器、控制柜电源的核心。
- 线性稳压电路通俗理解:机器人电源的 "高精度稳压器",不管输入电压怎么波动,都能输出固定的稳定电压,纹波极低、噪声极小,适配主控、高精度传感器供电。
- 开关电源电路通俗理解:机器人电源的 "高效率转换器",通过电感储能和 PWM 调制实现电压转换,效率极高、发热极小,适配电池供电的机器人,提升续航能力。
- 电源保护电路通俗理解:机器人电源的 "安全保镖",实现过流、过压、短路、反接保护,避免电源异常烧毁机器人硬件,是机器人硬件系统安全的核心。
六、功率驱动篇:机器人运动执行的 "肌肉控制核心"
机器人的电机、电磁阀、气动抓手等执行器,都需要功率驱动电路控制,是机器人 "动起来" 的核心,直接对接机器人运动控制全流程。
- 功率开关电路通俗理解:机器人执行器的 "电控大开关",用主控的微弱弱电信号,控制大功率强电负载的通断,实现弱电控制强电。
- H 桥驱动电路通俗理解:机器人电机的 "正反转控制器",4 个功率管组成 H 桥拓扑,控制电机电流的方向,实现电机正反转和 PWM 调速,是机器人移动底盘、机械臂的核心驱动电路。
- 感性负载保护通俗理解:机器人电机 / 电磁阀的 "尖峰吸收器",电机、电磁阀是感性负载,关断瞬间会产生高压尖峰,续流二极管能吸收这个尖峰,保护功率管不被击穿,是驱动电路必不可少的保护设计。
七、全部知识串联:模电完整逻辑链(机器人专属)
- 半导体器件基础 = 机器人硬件电路的核心积木
- 运算放大器应用 = 机器人传感信号处理的核心心脏
- 模拟滤波电路 = 机器人信号抗干扰的噪声净化器
- 电源管理电路 = 机器人硬件系统稳定运行的心脏
- 功率驱动电路 = 机器人运动执行的肌肉控制核心
- SimulIDE 仿真 = 模电电路设计的零成本验证平台
八、现实落地:机器人专业学模电到底能干什么
完全脱离做题,讲真实用途:
- 机械臂设计:用运放设计力传感器信号调理电路,用 MOS 管设计关节电机驱动电路,用线性稳压设计高精度供电电路,实现机械臂高精度力控
- 移动机器人设计:用二极管做电源防反接保护,用 DC-DC 电路设计电池供电系统,用 H 桥电路设计底盘电机驱动,用 RC 滤波做超声传感器信号处理
- 工业机器人设计:用仪用放大器设计六维力传感器调理电路,用开关电源设计控制柜供电系统,用功率驱动电路设计伺服电机驱动,用比较器设计硬件过流保护
- 机器人故障诊断:用模电原理分析电机驱动烧毁、主控烧板、传感器数据异常的根本原因,设计保护电路,提升机器人硬件可靠性
- 机器人竞赛项目开发:用模电电路实现传感器信号调理、电机驱动、电源管理,提升机器人性能和稳定性,是竞赛获奖的核心硬件基础
九、最终极简总括(背诵级)
模电是处理连续模拟信号的技术法则,是机器人硬件工程的底层操作系统;半导体器件是基础积木,运放是传感核心,滤波是抗干扰关键,电源是稳定心脏,驱动是执行核心;整个模电,就是:研究模拟电信号的处理与能量控制规律,并用这套规律让机器人 "供电稳、测得准、动得顺、不烧板"。
机器人专业「考点 + 专业课联动」精准通关
期末必考考点(机器人方向侧重)
- 二极管单向导电性、整流、稳压、钳位电路 → 机器人电源防反接、续流保护、整流电路设计
- 三极管 / MOS 管开关、放大特性,静态工作点设置 → 机器人执行器驱动、功率放大电路设计
- 运放 "虚短虚断" 核心特性,反相 / 同相比例放大、电压跟随器、比较器、差分放大电路 → 机器人传感器微弱信号放大、信号调理、硬件保护电路
- RC/LC/RLC 滤波电路特性,截止频率计算,有源 / 无源滤波设计 → 机器人传感器信号降噪、抗干扰电路设计
- 线性稳压、整流滤波电路原理,电源保护电路设计 → 机器人电源系统设计、供电稳定性优化
- 功率放大电路、H 桥驱动电路原理,感性负载保护设计 → 机器人电机驱动、执行器控制电路设计
直接联动核心专业课
- 《传感器与检测技术》→ 传感器信号调理电路、放大电路、滤波电路、传感器供电与标定
- 《电机与拖动基础》→ 电机驱动电路、H 桥拓扑、PWM 调速、感性负载续流保护电路设计
- 《机器人控制工程》→ 执行器驱动、传感器信号处理、硬件安全保护、闭环控制硬件基础
- 《嵌入式系统与单片机》→ 主控 IO 电平匹配、电源电路、外设驱动电路、ADC/DAC 信号调理
- 《移动机器人技术》→ 电源管理、底盘电机驱动、超声 / 红外传感器信号处理、里程计硬件电路
- 《机器人故障诊断》→ 电路故障仿真、保护电路验证、硬件异常信号分析、故障根源定位
- 《工业机器人技术》→ 伺服电机驱动、力传感器信号调理、控制柜电源设计、安全回路硬件保护
机器人工程专属 SimulIDE 实战|边跑边懂,速成通关
完全沿用参考文档的 SimulIDE 操作规范,适配 0.4.15 稳定版,所有案例均贴合机器人工程核心场景,按步骤可直接复刻,每步附操作 + 仿真验证 + 工程结论。
前置必看(5 分钟搞定)
- 环境配置:Ubuntu 系统一键安装依赖 + 启动命令,AppImage 版可直接启动,全程无复杂配置;
- 核心操作速记:左侧元件库拖拽→中间画布连线→底部电源键启停仿真→顶部 Tools 调用仪表;
- 快捷键:F2 示波器、F3 万用表、F4 逻辑分析仪,鼠标滚轮缩放画布,双击元件修改参数;
- 通用规则:所有电路必须接电源 + GND 形成闭合回路,模拟电路注重参数匹配,功率电路注重保护设计。
实战 1:机器人电源防反接与全波整流滤波电路(入门必做)
实验目标:掌握机器人电源防反接保护、交流转直流整流滤波电路设计,解决机器人电源接反烧主控、电源纹波过大的行业通病,验证二极管单向导电性与整流滤波核心原理。
所需元件
表格
| 元件名称 | 英文名称 | 元件分类 | 核心参数 |
|---|---|---|---|
| 交流电源 | AC Source | Inputs/Outputs | 15V/50Hz(机器人适配器常用) |
| 整流二极管 | Diode | Analog | 1N4007×4 |
| 电解电容 | Capacitor | Analog | 1000μF |
| 陶瓷电容 | Capacitor | Analog | 100nF |
| 电阻 | Resistor | Analog | 100Ω |
| 接地 | GND | Inputs/Outputs | 无 |
| 示波器 | Oscilloscope | Tools | 无 |
| 万用表 | Multimeter | Tools | 无 |
搭建与仿真步骤
- 元件放置:依次将 15V AC 交流电源、4 只 1N4007 二极管、1000μF 电解电容、100nF 陶瓷电容、100Ω 负载电阻、GND 拖入画布,按桥式整流拓扑排列;
- 参数修改:双击二极管确认型号 1N4007,电解电容 1000μF、耐压 50V,陶瓷电容 100nF,负载电阻 100Ω;
- 电路连线:4 只二极管组成桥式整流电路,交流电源接整流桥输入端,整流桥输出端正极接电容正极 + 负载电阻一端,电容负极、负载电阻另一端、整流桥输出端负极均接 GND;
- 仪表接入:F2 打开示波器,CH1 接交流电源输入,CH2 接整流桥输出(滤波前),CH3 接电容输出端(滤波后);F3 打开万用表,电压档测量滤波后输出电压。
仿真验证与工程结论
- 启动仿真,示波器 CH1 显示 50Hz 正弦交流信号,CH2 显示全波整流后的馒头波,CH3 显示平滑的直流电压,万用表显示输出电压≈12V,验证桥式整流 + 电容滤波的核心原理;
- 反向接入电源,重启仿真,回路无电流、输出电压为 0,验证二极管单向导电性,实现电源防反接保护,机器人电源正负极接反也不会烧主控板;
- 去掉滤波电容,重启仿真,可观察到输出电压纹波极大,验证滤波电容的纹波抑制作用;
- 工程结论:二极管桥式整流 + 电容滤波是机器人电源适配器的核心电路,二极管单向导电性是电源防反接保护的基础,所有机器人电源电路都离不开这两个核心设计,SimulIDE 可零成本验证参数匹配,避免实物烧板风险。
实战 2:机器人传感器运放反相放大电路(模电核心)
实验目标:掌握运放反相比例放大电路设计,放大机器人应变片力传感器的毫伏级微弱信号,学会用示波器分析放大效果,解决机器人传感器信号过小、主控无法识别的核心痛点。
所需元件
表格
| 元件名称 | 英文名称 | 元件分类 | 核心参数 |
|---|---|---|---|
| 直流信号源 | DC Source | Inputs/Outputs | 0~10mV(模拟传感器信号) |
| 运算放大器 | Op-Amp | Analog | LM358 |
| 电阻 | Resistor | Analog | 1kΩ(R1)、100kΩ(Rf)、100Ω |
| 直流电源 | DC Source | Inputs/Outputs | ±12V(运放双电源供电) |
| 接地 | GND | Inputs/Outputs | 无 |
| 示波器 | Oscilloscope | Tools | 无 |
| 万用表 | Multimeter | Tools | 无 |
搭建与仿真步骤
- 元件放置:±12V 直流电源、LM358 运放、1kΩ 电阻、100kΩ 电阻、10mV 直流信号源、100Ω 负载、GND 拖入画布;
- 参数修改:运放型号 LM358,R1=1kΩ,Rf=100kΩ,信号源输出 5mV 直流电压,运放正电源接 + 12V,负电源接 - 12V;
- 电路连线:信号源正极→R1 一端→运放反相输入端,运放反相输入端→Rf 一端→运放输出端,运放同相输入端→GND,运放输出端→100Ω 负载→GND;
- 仪表接入:F2 打开示波器,CH1 接信号源输出(放大前),CH2 接运放输出端(放大后);F3 打开万用表,分别测量输入、输出电压。
仿真验证与工程结论
- 启动仿真,万用表显示输入电压 5mV,输出电压≈-500mV,放大倍数 100 倍,完全符合反相比例放大增益公式 Av=-Rf/R1,验证运放 "虚短虚断" 核心特性;
- 调整信号源输出电压从 0mV 到 10mV,可观察到输出电压同步线性变化,验证运放的线性放大特性;
- 修改 Rf 为 10kΩ,放大倍数变为 10 倍,重启仿真,输出电压同步变化,可根据机器人传感器信号幅度,快速匹配最优放大倍数;
- 工程结论:运放反相比例放大电路是机器人微弱传感器信号放大的核心电路,能将毫伏级信号放大到主控 ADC 可识别范围,SimulIDE 可直观看到放大效果,验证放大倍数与参数匹配,解决机器人传感器信号过小的核心痛点。
实战 3:机器人电机驱动 MOS 管 H 桥电路(工程落地核心)
实验目标:掌握 MOS 管 H 桥电机驱动电路设计,用主控弱电信号控制电机正反转与 PWM 调速,解决机器人执行器 "弱电控制强电" 的核心需求,验证 MOS 管开关特性与感性负载保护设计。
所需元件
表格
| 元件名称 | 英文名称 | 元件分类 | 核心参数 |
|---|---|---|---|
| 直流电源 1 | DC Source | Inputs/Outputs | 5V(主控 IO 供电) |
| 直流电源 2 | DC Source | Inputs/Outputs | 12V(电机供电) |
| NMOS 管 | MOSFET-N | Analog | IRF540×2 |
| PMOS 管 | MOSFET-P | Analog | IRF9540×2 |
| 直流电机 | DC Motor | Analog | 额定 12V |
| 续流二极管 | Diode | Analog | 1N4007×4 |
| 栅极限流电阻 | Resistor | Analog | 100Ω×4 |
| 按键 | Push Button | Inputs/Outputs | 正转 / 反转按键 2 个 |
| 接地 | GND | Inputs/Outputs | 无 |
| 示波器 | Oscilloscope | Tools | 无 |
搭建与仿真步骤
- 元件放置:5V 电源、正转 / 反转按键、100Ω 栅极限流电阻、2 只 IRF9540 PMOS、2 只 IRF540 NMOS、12V 电源、DC 电机、1N4007 续流二极管、GND 拖入画布;
- 参数修改:MOS 管型号匹配 IRF540/IRF9540,栅极限流电阻 100Ω,4 只续流二极管分别与 4 只 MOS 管反向并联,电机额定电压 12V;
- 电路连线:4 只 MOS 管组成 H 桥拓扑,左上、右上为 PMOS,左下、右下为 NMOS,电机接在 H 桥两个中间节点;5V 电源通过正转按键控制左上 + 右下 MOS 管栅极,反转按键控制右上 + 左下 MOS 管栅极;12V 电源接 H 桥高端,GND 接 H 桥低端;
- 仪表接入:示波器 CH1 接电机两端电压,CH2 接 MOS 管栅极控制信号,GND 接电路 GND。
仿真验证与工程结论
- 启动仿真,按下正转按键,左上 + 右下 MOS 管导通,电机正向全速转动;按下反转按键,右上 + 左下 MOS 管导通,电机反向全速转动,验证 H 桥电机正反转控制核心原理;
- 断开续流二极管,重启仿真,可观察到电机换向瞬间的高压尖峰,理解续流二极管的核心作用:吸收电机感性负载的反向电动势,保护 MOS 管不被击穿,是机器人电机驱动电路的必备保护设计;
- 将按键替换为 PWM 信号源,可观察到电机转速随 PWM 占空比变化,实现电机无级调速;
- 工程结论:MOS 管 H 桥电路是机器人直流电机驱动的核心拓扑,是移动机器人、机械臂运动控制的核心电路,SimulIDE 可仿真感性负载的尖峰电压,验证保护电路有效性,避免实物电路中 MOS 管击穿、主控 IO 烧毁。
实战 4:机器人线性稳压电源电路(系统稳定核心)
实验目标:掌握三端稳压器线性稳压电路设计,为机器人主控、传感器提供稳定的 5V 供电,解决机器人电池电压波动导致的供电不稳定问题,验证线性稳压核心原理。
所需元件
表格
| 元件名称 | 英文名称 | 元件分类 | 核心参数 |
|---|---|---|---|
| 直流电源 | DC Source | Inputs/Outputs | 7~18V(模拟锂电池电压波动) |
| 三端稳压器 | Voltage Regulator | Analog | LM7805 |
| 电解电容 | Capacitor | Analog | 100μF、220μF |
| 陶瓷电容 | Capacitor | Analog | 100nF×2 |
| 负载电阻 | Resistor | Analog | 10Ω(模拟主控负载) |
| 发光二极管 | LED | Inputs/Outputs | 电源指示灯 |
| 限流电阻 | Resistor | Analog | 270Ω |
| 接地 | GND | Inputs/Outputs | 无 |
| 示波器 | Oscilloscope | Tools | 无 |
| 万用表 | Multimeter | Tools | 无 |
搭建与仿真步骤
- 元件放置:可调直流电源、LM7805 三端稳压器、100μF 输入电容、220μF 输出电容、100nF 陶瓷电容、10Ω 负载电阻、LED+270Ω 限流电阻、GND 拖入画布;
- 参数修改:稳压器型号 LM7805,输入电容 100μF,输出电容 220μF,负载电阻 10Ω,LED 串联 270Ω 限流电阻;
- 电路连线:直流电源正极→100μF 电容正极 + 100nF 电容→LM7805 输入端,LM7805 输出端→220μF 电容正极 + 100nF 电容→负载电阻 + LED 限流电阻,LM7805 接地端、所有电容负极、负载电阻另一端、电源负极均接 GND;
- 仪表接入:示波器 CH1 接稳压器输入端,CH2 接稳压器输出端;万用表分别测量输入、输出电压。
仿真验证与工程结论
- 启动仿真,调整输入电压从 7V 到 18V,万用表显示输出电压稳定在 5V 不变,LED 常亮,验证线性稳压电路的稳压特性,不管输入电池电压怎么波动,都能输出稳定的 5V 电压;
- 给输入电压叠加 1V 的交流纹波,重启仿真,示波器 CH1 显示带纹波的输入电压,CH2 显示几乎无纹波的 5V 输出,验证线性稳压电路的纹波抑制能力;
- 当输入电压低于 7V 时,输出电压随输入电压下降,验证线性稳压器的压差特性,输入电压必须高于输出电压 + 压差,才能正常稳压;
- 工程结论:线性稳压电路是机器人主控、高精度传感器供电的核心电路,能实现高稳定、低纹波的电压输出,是机器人硬件系统稳定运行的基础,SimulIDE 可仿真电池电压波动下的稳压效果,验证电路参数匹配,避免实物供电不稳定导致的主控死机、传感器数据异常。
机器人工程专属速成通关法
-
放弃无用刷题,聚焦核心场景不用死磕复杂的三极管微变等效电路计算、运放频率特性复杂推导、非工科例题,跳过与机器人无关的电路案例。重点只学:二极管核心应用、三极管 / MOS 管开关电路、运放基本放大与比较电路、RC 滤波电路、线性稳压电路、H 桥驱动电路,这些是机器人硬件 100% 会用到的核心。
-
建立「模电 = 机器人硬件底层」的工程思维在你眼里:电源电路 = 机器人的心脏,驱动电路 = 机器人的肌肉,信号调理电路 = 机器人的感官,保护电路 = 机器人的免疫系统。所有模电知识,都是为了让机器人 "供电稳、测得准、动得顺、不烧板"。
-
结合 SimulIDE 仿真,从现象理解原理先跑通仿真看现象,再拆解电路理解原理,最后修改参数验证规律:
- 修改电阻看 LED 亮度变化 → 直观理解欧姆定律与限流电路
- 放大前后波形对比 → 吃透运放放大核心逻辑
- 按键控制电机正反转 → 掌握 H 桥驱动电路原理
- 输入波动输出稳定 → 理解线性稳压电路核心
- **背诵级极简总结(考前直接背)**二极管是单向阀门,管电源防反接、整流续流,是机器人防烧第一道防线;三极管 / MOS 管是电控开关,管弱电控制强电,是机器人执行器驱动核心;运放是信号放大镜,靠虚短虚断实现精准放大,让机器人传感器测得准;滤波电路是噪声净化器,通需要的频段,挡干扰噪声,让机器人信号更稳定;电源电路是系统心脏,输出稳定电压,让机器人硬件不宕机;模电 + SimulIDE 仿真 = 机器人硬件设计零成本验证平台,是从理论到实物的必经之路。
摘要:本文系统介绍了模拟电子技术在机器人工程中的应用,通过SimulIDE仿真工具详细解析了五大核心电路模块:半导体器件基础(二极管、三极管、MOS管)、运算放大器应用(信号放大与调理)、模拟滤波电路(信号抗干扰)、电源管理电路(系统供电稳定)和功率驱动电路(执行器控制)。针对机器人工程专业需求,文章采用"现象-原理-应用"的讲解方式,结合具体仿真案例(如电源防反接、力传感器信号放大、电机驱动等),直观展示了模电知识在机器人硬件设计中的实际应用。特别强调通过仿真验证代替复杂公式推导,帮助读者快速掌握机器人硬件系统设计的关键技术要点。