MIPI
MIPI(Mobile Industry Processor Interface,移动产业处理器接口)是2003年由 ARM,Nokia,ST,TI等公司成立的一个联盟,目的是把电子设备内部的接口,如摄像头、显示屏接口、射频/基带接口等标准化,从而减少电子设备设计的复杂程度和增加设计灵活性。统一接口标准的好处是电子设备厂商根据需要可以从市面上灵活选择不同的芯片和模组,更改设计和功能时更加快捷方便。
MIPI联盟下面有不同的WorkGroup,分别定义了一系列的手机内部接口标准,比如:
• 摄像头接口------CSI
• 显示接口------DSI
• 射频接口------DigRF
• 麦克风/喇叭接口------SLIMbus
• 等等
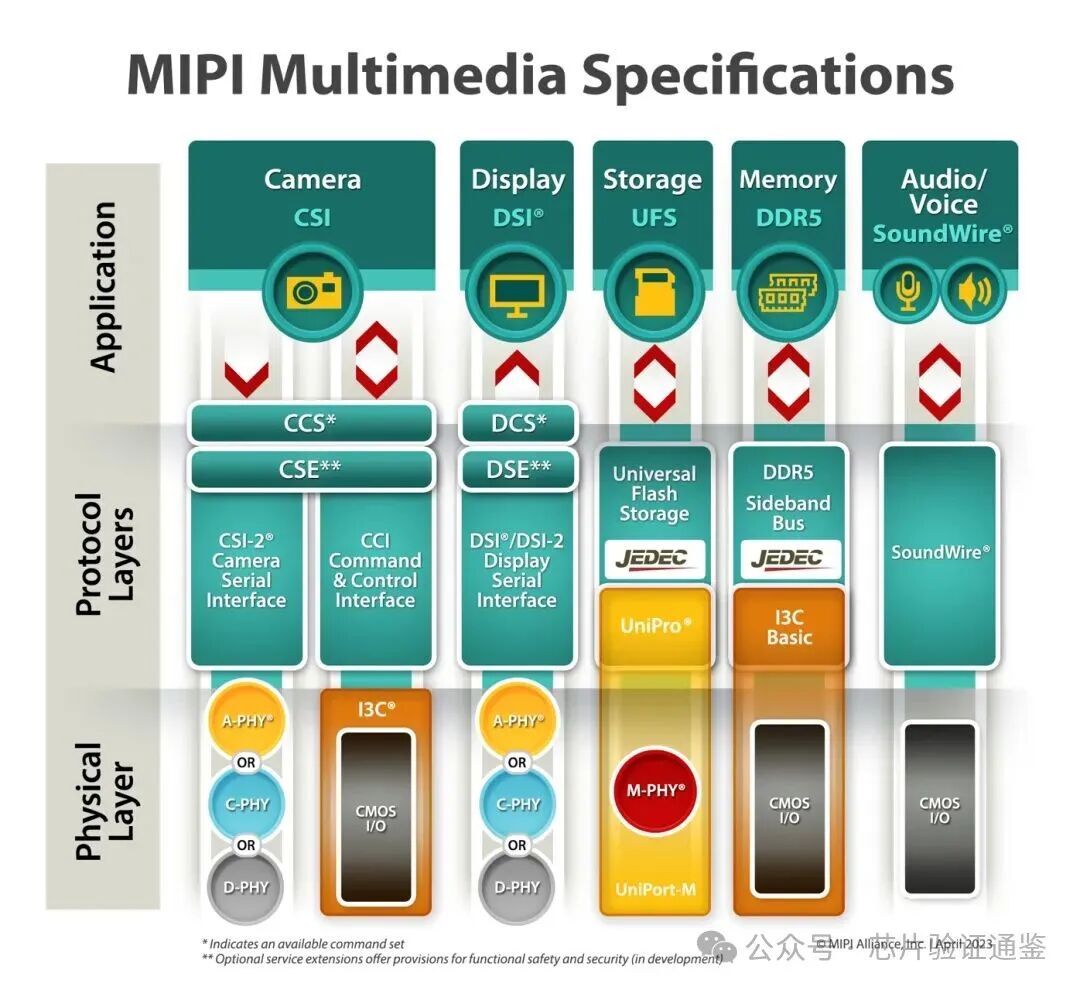
这些MIPI WorkGroup 并不是一个单一的接口或协议,而是包含了一整套协议和标准,主要包含三层,如下图所示,从上往下分别为:应用层、协议层、物理层。
DSI 协议分层
下图所示是 DSI 的协议分层:
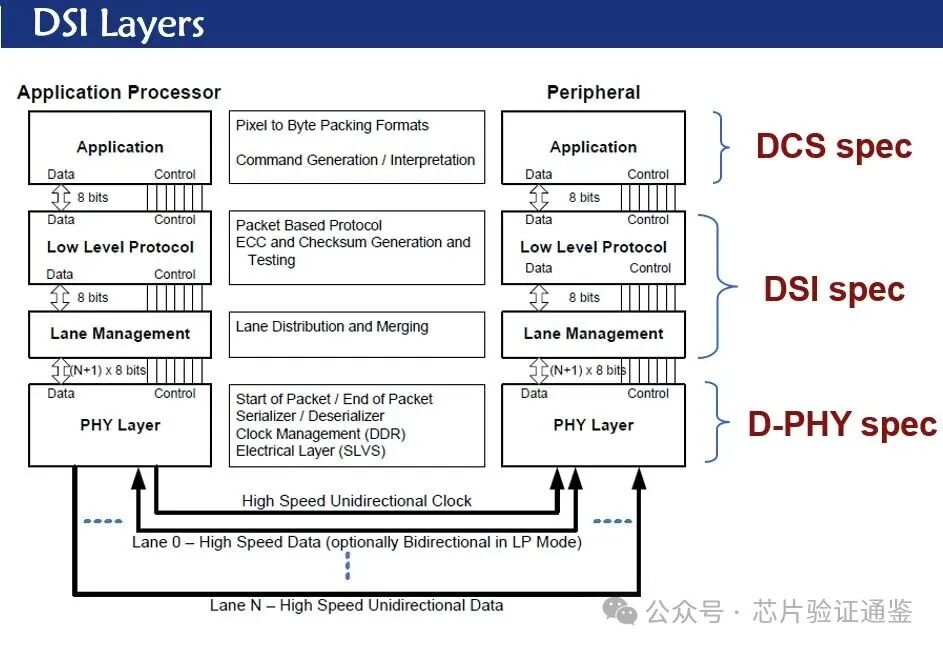
1、应用层
应用层处理更高层次的编码,将要显示的数据打包进数据流中,下层会处理并发送应用层的数据流。
发送端将命令以及数据以 MIPI DSI 的格式编码,接收端则将接收到的数据还原为原始的数据。
2、协议层
协议层主要是打包数据,在原始的数据上添加 ECC和校验和等东西。应用层传递下来的数据会打包成两种格式的数据:长数据包和短数据包。
发送端将原始数据打包好,添加包头和包尾,然后将打包好的数据发送给下层。接收端接收到下层传来的数据包以后执行相反的操作,去除包头和包围,然后使用ECC进行校验接收到的数据,如果没问题就将解包后的原始数据交给应用层。
3、链路层
链路层负责如何将数据分配到具体的通道上,MIPI DSI可以支持 1/2/3/4-Lane,采用几通道取决于你的实际应用,如果带宽需求低,那么 2-Lane 就够了,带宽高的话就要 4-Lane。
协议层下来的数据包都是串行的,如果只有1-Lane的话,那就直接使用这 1-Lane 将数据串行的发送出去,如果是多lane,那么发送端就要进行数据分配,接收端进行数据合井。
4、物理层
物理层就是最底层了,完成MIPI DSI 数据在具体电路上的发送与接收,物理层规定了MIPI DSI 的整个电气属性,信号传输时的电压、输入/输出电路以及用于从串行比特流中采样"1"、"0"的时钟机制等,还规定了传输开始(SoT)与传输结束(EoT)的指示机制,以及可在发送端与接收端 PHY 之间传递的其它带外信息,比特级和字节级的同步机制也包含在PHY中。
MIPI的物理层目前有D-PHY,M-PHY,C-PHY,A-PHY四种:
• 2007年出现了D-PHY,是应用最广泛的MIPI物理层;
• 2008年提出了M-PHY,数据传输量最大,但在实际应用案例几乎没有,主要原因是和camera的应用发展有关,camera在达到20M的像素之后并没有像MIPI组织的预期一样继续大幅往上更高像素数方面发展。而M-PHY设备开发过于复杂,没有设备商支持,所以仍使用D-PHY协议;
• 2013年提出了C-PHY,相比M-PHY传输速度低,但是和D-PHY更容易兼容,且设备开发成本较低;
• 2020年9月提出了A-PHY v1.0,主要解决长距离和可靠性问题,未来主要应用于车载场景。
CSI-2
CSI-2(Camera Serial Interface 2)是专为摄像头外设设计的MIPI协议子集,用于主控芯片与图像传感器之间的图像数据传输,支持RAW、YUV等多种图像格式,是嵌入式高清摄像头开发的标准接口。
- 传输方向:单向传输(摄像头→主控),部分版本支持双向控制通道(用于配置摄像头参数);
- 数据格式:支持RAW8/10/12/14(原始图像数据)、YUV422/YUV420(压缩图像数据),适配不同分辨率和画质需求;
- 控制通道:通常搭配I2C作为控制通道,主控通过I2C配置摄像头的曝光、增益、分辨率等参数,图像数据则通过CSI-2传输;
- 典型场景:嵌入式视觉设备(如人脸识别终端)、智能手机摄像头、车载环视摄像头,常用配置为1路CLK+2路DATA,速率满足1080P@30fps需求。
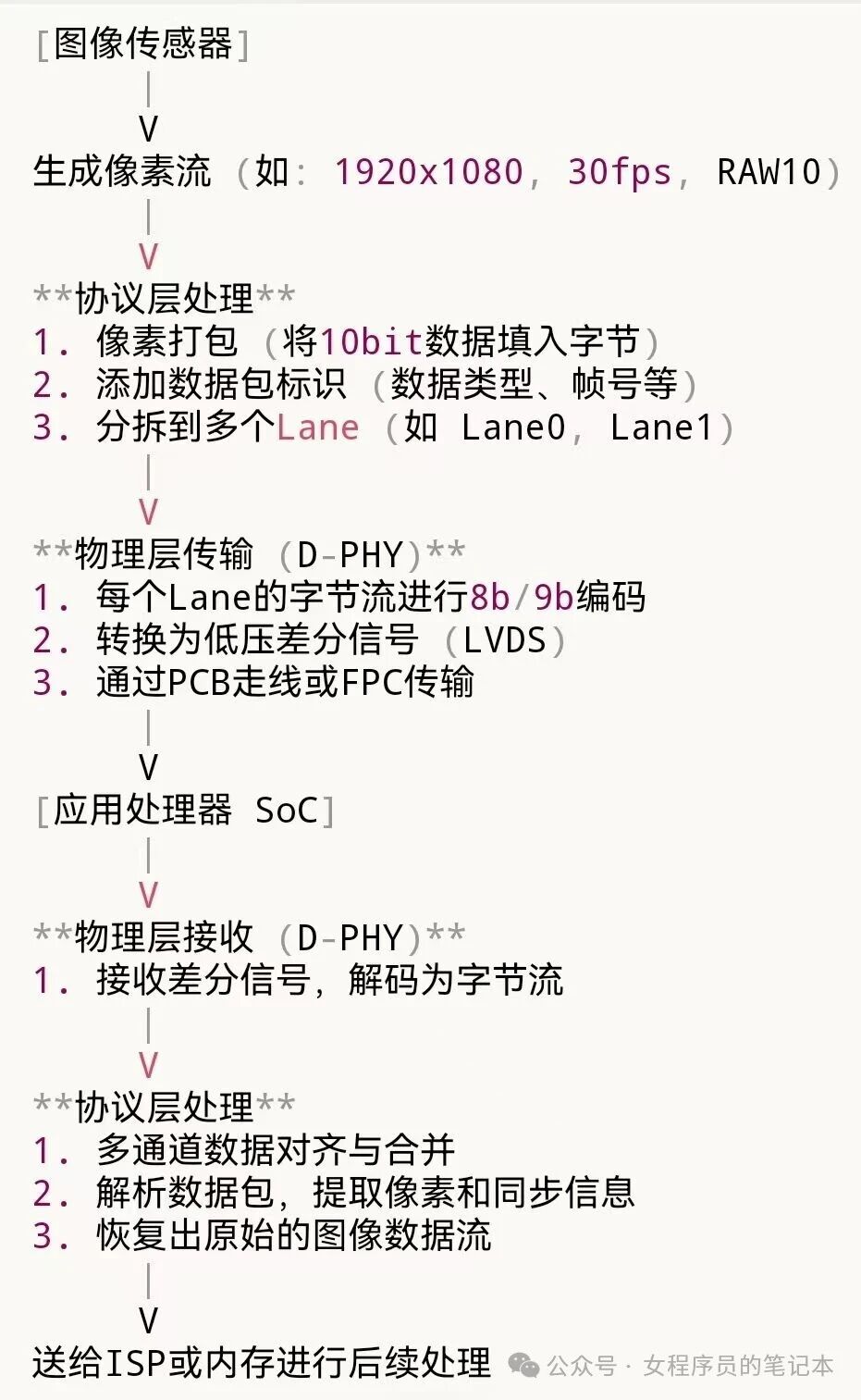
CSI数据传输简化流程
物理层
按 MIPI 最新规范,CSI‑2 共有 3 种物理层(PHY):
- D‑PHY(最常见)
- 传统差分:1 对差分时钟 + 1~4 对差分数据
- 每 lane 速率:~80 Mbps -- 2.5 Gbps
- 应用:手机、平板、普通安防摄像头
- C‑PHY(高速低 EMI)
- 每 lane 为 3 线差分(三相),无独立时钟线(时钟嵌入数据)
- 每 lane 速率:最高~6 Gsps(≈16 Gbps 有效)
- 特点:线数少、速率高、EMI 小
- 应用:高端手机、高分辨率工业相机
- A‑PHY(长距离车载)
- SerDes 长距物理层,单条差分线传输高速数据
- 距离:最长 15 米
- 应用:汽车 ADAS、车载环视、工业长距离视觉
MIPI CSI-2 (CDPHY=14-lane, DPHY=2 4-lane/4*2-lane)是指:
支持两种物理层。
在C‑PHY模式下:1个C‑PHY链路,最多4条lane
在D‑PHY模式下:
2个独立的D‑PHY链路,每个链路1时钟lane+4数据lane,可同时接2路4‑lane摄像头。
4个独立的D‑PHY链路,每个链路1时钟lane+2数据lane,可同时接4路2‑lane摄像头。