近日,阿木实验室完成香港理工大学项目定制交付。此次项目围绕科研场景中的平台搭建、机载计算、感知融合、任务执行与后续开发,完成了一套更具系统性与延展性的无人机方案落地。
在硬件层面,本次平台采用大轴距机架方案,为复杂挂载集成与上层任务开发预留了更充足的空间。在此基础上,平台完成了机械臂上机与AGX机载电脑部署,进一步提升了整机的任务拓展能力。机械臂的加入,让平台具备了向空中操作、任务执行等方向继续延伸的可能;AGX机载电脑的部署,则为后续机载感知、任务处理与功能开发提供了更强的算力支撑。在系统层面,平台适配Prometheus 系统,形成了一套面向后续开发与验证的平台化方案。
01平台底座
该平台采用950mm轴距机架,整机在结构设计上兼顾了空间余量与飞行效率。平台裸机重量控制在6.5kg以内,空载续航可达40分钟以上,在保证飞行稳定性的同时,也为机载电脑、激光雷达、RGB-D相机与机械臂等模块的协同部署预留了更充足的集成空间。对于需要持续开展实验验证的科研团队来说,这样的平台底座更适合作为长期使用、持续迭代的飞行载体。

02 机载算力
该平台采用Jetson AGX Orin 作为核心机载计算平台,具备 275TOPS算力,搭载12核Arm Cortex-A78AE CPU,并配备深度学习加速单元与大容量本地存储,能够更好地满足视觉感知、目标识别、多传感器融合、三维建图与自主决策等复杂任务需求。

它为后续科研开发预留了足够充足的算力空间,平台不再只是完成基础飞控任务,而是可以进一步承载更复杂的机载感知与智能处理流程。对于高校科研团队而言,这意味着平台具备面向后续研究方向持续延展的能力。
除了高性能机载方案之外,阿木实验室的Allspark2系列 机载电脑也提供了另一种更适合小型平台部署的思路。其中最高可提供157TOPS算力,整机重量约188g,尺寸约102.5mm × 62.5mm × 31mm,兼顾性能与体积。在不同尺寸平台、不同开发需求之间提供更灵活的算力选择。

03 机械臂上机
此次交付中,机械臂的上机集成,是平台能力拓展中的重要一步。作为一款 6 自由度轻量化机械臂,在重量、控制能力与接口开放性之间取得了较好的平衡,既适合移动平台集成,也能够更好地适应无人机这类对结构与负载更敏感的应用场景。
机械臂的加入,使平台的角色发生了明显变化。它不再只是一个飞行载体,而开始具备面向空中操作与任务执行的延展基础。对科研团队来说,这意味着平台能够承接更多实验方向的探索,例如空中接触、目标交互、复杂作业验证以及具身智能相关研究。
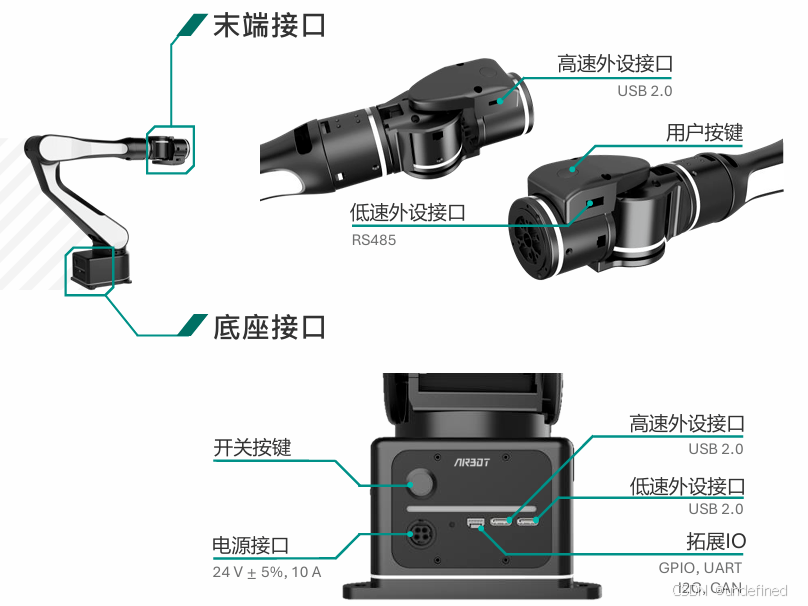
与此同时,该机械臂本身也具备较好的开放属性。其支持位置控制、力矩控制、速度控制,并提供 C++、Python、ROS、ROS2、Web 等多种开发接口,便于后续与不同算法、传感器和执行器进行联动。这种开放而灵活的机械臂能力,也进一步提升了平台的研究价值与应用想象空间。
04 研发生态
平台适配Prometheus系统,进一步打通了从飞行控制到上层开发的关键链路。其在科研教学、算法开发、无人机控制验证等方向具备良好的应用基础。该平台基于PX4开源飞控固件和ROS1/ROS2机器人操作系统开发、目前已集成控制、规划、集群、激光SLAM及SpireCV等模块,支持多平台仿真引擎(Windows、Ubuntu),支持地面站人机交互,提供更容易上手的开发体验,不仅能够更好地承接飞控开发与算法验证任务,也能为后续功能迭代、实验复现和研究推进提供更顺畅的系统支撑。
与此同时,AIRBOT Play机械臂也具备良好的开发友好性,支持可视化交互、仿真部署及多种API接口,便于后续调试、验证与二次开发。整体来看,这套方案不仅完成了平台交付,也形成了更适合科研团队持续扩展的研发生态。
持续赋能
一次定制交付的意义,从来不只是交付完成,更在于后续能否持续支撑研究推进。此次面向香港理工大学的项目,体现出的正是阿木实验室在平台集成、算力部署、任务拓展与系统适配上的整体能力。平台既保留了足够的工程稳定性,也兼顾了后续扩展所需的开放性与灵活性,使其既能满足当前实验需求,也能承接未来更多任务与算法的持续演进。
未来,阿木实验室也将继续围绕高校科研、具身智能与无人系统应用场景,不断完善平台能力与研发生态,推动无人机平台从"可用"走向"好用",从"单点交付"走向"持续赋能"。
联系我们,获取方案更多信息


如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:
有工程师亲自解答
10000+无人机开发者和你共同进步!
