一、作品概述
1.1 作品名称
《基于地平线RDK X5的智能医药机器人系统:融合视觉模型识别与OpenCLAW远程机械臂控制》
1.2 应用领域
面向智慧医疗场景,当前药房管理普遍存在药品分拣效率低下、误检漏检率偏高、远程运维困难及用药安全管控不足等核心痛点,传统人工管理模式难以适配智慧药房的规模化、精细化发展需求。为此,本项目依托国产边缘计算设备------地平线RDK X5的高算力特性,构建端侧实时视觉识别与OpenCLAW协议驱动的远程协同控制闭环系统,聚焦药品分拣、仓储管理、智能诊断及用药安全等核心场景,为智慧药房、无人药房提供高效、安全、可落地的国产化解决方案。
1.3 主要功能
系统以地平线RDK X5为核心主控,集成OpenCLAW控制框架与YOLOv5-lite视觉识别模型,结合大语言模型实现智能诊断与自然语言交互 ,通过六轴机械臂(5轴运动控制+1轴夹爪)完成药品巡检、识别、取放及处方生成 等全流程自动化操作,具备本地离线运行与互联网远程控制双重能力,适配复杂药房环境的多样化需求。
系统融合激光雷达与摄像头实现动态避障和自主导航,针对儿童靠近等突发场景可实现实时预警与紧急制动,大幅提升人机共融安全性。结合大语言模型对药品禁忌、剂量配伍的语义理解能力,实现用药安全双重校验,规避用药风险。
系统支持命令触发与定时任务双模式,可自主完成药房巡检、库存管理及过期药品清除;支持自然语言交互,自动生成处方报告与出库记录,构建全流程可追溯体系,满足医药行业合规要求。
机器人支持命令触发与定时任务两种运行模式,可自主完成日常巡检、药品新增与取用状态检测、药品位置与入库时间记录,以及过期药品自动清除等运维任务。当用户通过电脑端文本或飞书软件输入症状(如"我有点感冒/咳嗽了,帮我拿药"),系统将调用大模型完成智能诊断,结合YOLO识别结果精准抓取对应药品,并生成包含药品信息、服用建议的Markdown格式处方报告。所有药品出库记录(时间、药品名称等)均自动存储为MD文件,构建全流程可追溯管理体系,满足医药行业合规与审计要求。
1.4 创新性说明
本项目面向智慧医疗中药品分拣效率低、易误检漏检、用药安全校验不足、远程协同难等痛点,首次基于国产边缘计算平台地平线 RDK X5,构建 "端侧视觉大模型 + OpenCLAW 远程机械臂控制 + 大语言模型智能诊断" 的具身智能医药系统,实现药房环境下药品全流程自动化、智能化与安全化管理,主要创新如下:
1)国产高算力端侧平台深度适配,构建自主可控的计算底座
采用地平线RDK X5(搭载旭日5芯片)作为核心主控,替代传统X86架构及国外嵌入式方案,打造国产化、低功耗、强实时性的医药机器人计算核心。创新通过板端BPU硬件加速技术,将轻量化YOLOv5-lite模型高效部署于端侧,实现快速推理。
2)双控制链路创新设计,兼顾低时延与智能化
创新设计直通链路与LLM赋能链路双控制模式,针对不同复杂度任务实现差异化处理。简单固定任务通过直通链路跳过冗余解析流程,直接执行预设指令,优化了RDK X5板端算力资源分配,避免简单任务占用核心算力,实现了"低时延操作+智能化决策"的双重目标。
3)多源传感融合创新,适配复杂药房场景的安全运维需求
创新融合摄像头与二维激光雷达双传感设备,针对儿童靠近等突发危险场景,能够实现预警并避让,确保工作安全性。采用YOLOv5-lite模型部署策略,兼顾识别速度与精度,可全面感知药品类别、摆放位置、有效期及取用状态,规避人工分拣过程中的误检、漏检问题。
4)OpenCLAW协议闭环控制,实现远程协同与本地运维双向赋能
基于OpenCLAW协议构建专属远程机械臂控制框架,打通"端侧感知-指令下发-机械臂执行-状态回传"的全流程闭环,实现秒级指令响应与±2cm的精准定位,可灵活驱动六轴机械臂(5轴运动控制+1轴夹爪)完成药品取放、分拣等精细化作业。
4)大语言模型与视觉识别深度耦合,筑牢用药安全与可追溯防线
将大语言模型与视觉识别结果深度融合,支持自然语言症状输入(如"感冒、咳嗽"),自动完成智能诊断、药品推荐、禁忌排查及剂量校验,同时将所有药品出库记录(时间、药品名称、取用信息)自动归档为MD文件,构建全流程可追溯的电子台账。
5)全流程自主化任务引擎,赋能无人化药房落地应用
设计命令触发与定时任务双模式任务引擎,机器人可自主完成每日巡检、库存盘点、过期药品清除、药品位置更新等日常运维任务,结合多源传感融合与动态避障能力,无需人工过多介入,为无人药房、智慧药房的规模化落地,提供了兼具国产化、高可靠性与高实用性的具身智能解决方案。
二、需求分析
2.1 开发目标
为解决智慧药房的效率低、误检漏检、远程运维难、用药安全不足等痛点,项目聚焦于构建一套国产化、全流程自动化的具身智能药房系统。
项目基于地平线RDK X5国产边缘计算平台,替代传统X86/国外方案,构建低功耗、强实时的机器人控制底座,确保核心技术的自主可控与数据本地化;其次,项目突破关键性能指标,从速度、精度、稳定性上全面超越人工,解决分拣效率低、误检漏检率高的根本问题;最后,项目打造无人化运维能力,使机器人能自主执行巡检、盘点、过期药品清除等日常任务,满足智慧药房规模化、精细化的发展需求。
2.2 竞品分析
本作品对标市场上主流的医疗管理与智慧药房系统:如医院信息系统(HIS)、自动化发药机、智能药柜(ADC)、处方前置审核系统等,它们通常具备药品库存管理、处方调剂、用药审核等核心功能。然而,上述系统多依赖大型固定设备或医院内部局域网,缺乏端侧智能识别、自主移动抓取与用药安全语义审核的一体化能力,在药品误检漏检、远程运维、无人值守等场景存在明显短板。

与传统的人工药物分拣相比,本作品的优势有:
1. 面向医院、连锁药店及医药流通企业,无人化、智能化药房需求持续增长。
2. 同类产品功能有重叠,但全栈集成的直接竞品较少,差异化优势突出。
3. 端侧视觉、大模型诊断、自主导航与远程控制一体化闭环,填补"可移动、能理解、会校验"的空白。
4.传统人工管理模式难以满足药品追溯与GSP合规要求,智能化技术替代已成必然。
2.3 面向用户
本系统设计核心面向三类用户人员,分别是药房一线工作人员(负责药品分拣、日常巡检、处方核对)、药房运维管理人员(负责系统调试、设备维护、库存管控)及医疗相关值守人员(负责远程运维、用药咨询与应急处置)。面向此类用户,系统操作便捷、适配性强,无需复杂专业操作,即可通过自然语言或预设指令操控设备,大幅减少人工工作量;离线运行模式保障无外网环境下正常作业,远程控制功能打破空间限制,让药房管理更高效、安全、省心,真正适配智慧药房、无人药房的实际使用需求。
三、技术方案
3.1 硬件组成
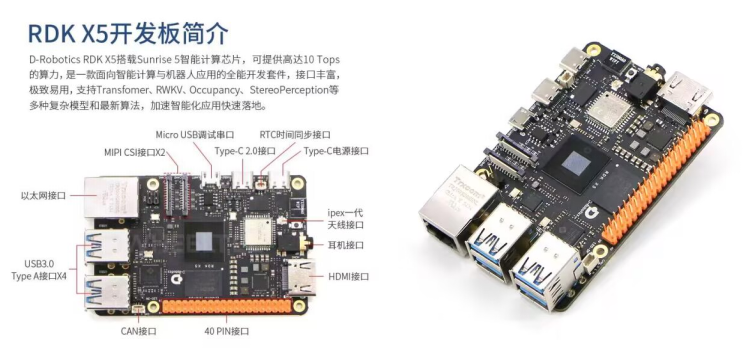
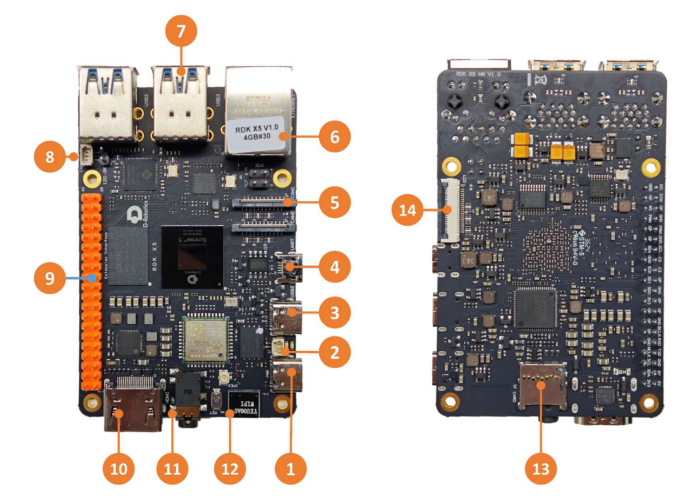
地平线RDK X5是一款面向具身智能、工业视觉与边缘机器人场景的高性能开发套件,搭载旭日5异构智能芯片,配备多核CPU与10TOPS高算力BPU,可高效部署视觉识别、轻量化大模型等AI算法,板载大容量内存并配备千兆网口、MIPI、CAN-FD、Wi-Fi6等丰富外设接口,扩展性强劲。设备预装Linux系统,深度适配ROS2、机器视觉开源框架,兼顾实时运动控制与端侧AI推理能力,功耗可控、开发便捷,广泛适用于机械臂控制、移动机器人、工业检测及智能边缘终端研发。
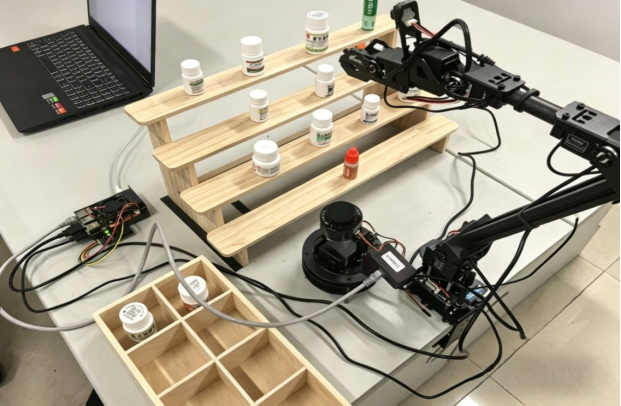
机械臂本体:六轴机械臂,由金属构件与6个ST-3215伺服电机,底层核心运动控制板ESP32,60W功率电源构成(运动轴:含5轴运动模块+1轴夹爪)。

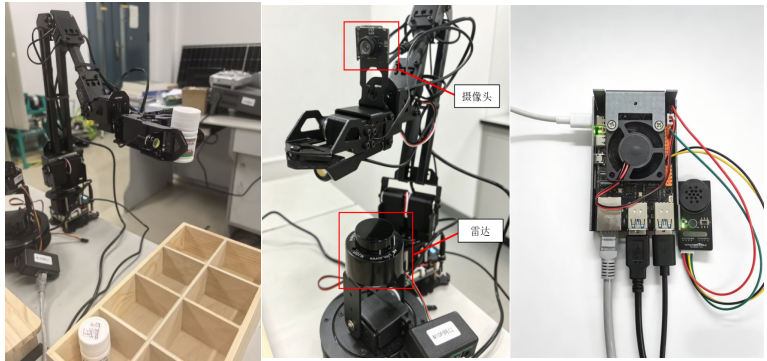
传感设备:镭神N10P二维激光雷达(配套支架)、AI语音识别模块(训练神经网络DNN以识别设定语音)、摄像头(USB接口,分辨率640*480)。
- 镭神 N10P 二维激光雷达
外观与尺寸:圆柱形设计,直径 52mm,高度 36.1mm,体积小,适合嵌入式机器人搭载。
核心功能:作为环境感知的核心传感器,通过旋转发射激光,实现二维平面的距离探测与地图构建,可用于机器人的避障、定位与环境建模。
适配场景:搭配支架可直接集成到 ROS 系统中,输出点云数据,为机械臂 / 移动机器人提供精准的空间位置与障碍物信息。
- Yahboom AI 语音识别模块
外观与接口:板载麦克风、复位按键、IIC通信接口,支持 5V 供电,集成度高。
核心功能:内置训练好的 DNN(深度神经网络)模型,可识别预设语音指令,实现语音交互。用户可通过训练自定义语音指令,为机器人提供自然语言交互入口。
适配场景:直接对接机器人主控,将语音信号转换为控制指令,是人机交互的关键模块。
- 30 万像素 USB 摄像头
外观与参数:小型模组化设计,USB 接口,分辨率为 640×480,搭配 50cm 数据线。
核心功能:作为视觉感知设备,采集环境图像数据,用于药品识别、物体定位与场景理解。可直接接入 ROS 系统,为后续的目标检测、匹配任务提供视觉输入。
适配场景:低功耗、易集成,适合作为机器人的 "眼睛",完成基础的视觉信息采集任务。

药品置物架:木质2*4药品放置盒与4层台阶式药品摆放架,用于药品的摆放与分类。
其它电路连接、拓扑关系:网线、USB数据线、固定支架(用于安装摄像头、激光雷达及机械臂)、电源插排等。
3.2 系统设计图
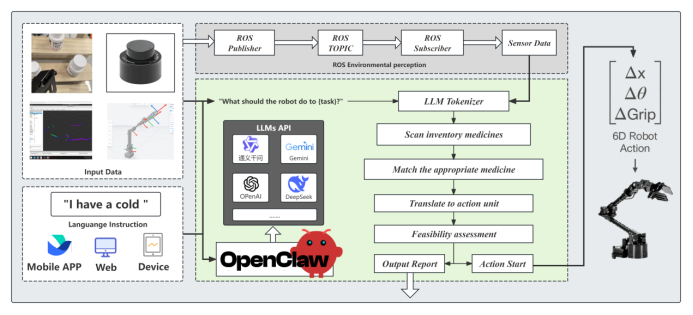
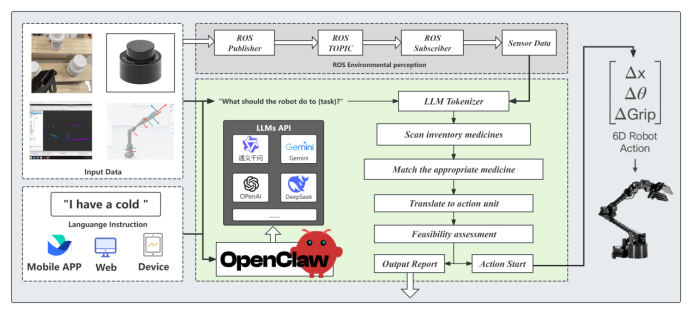
基于大语言模型(LLM)的智能机械臂药品取放系统的完整工作流程,核心框架是 OpenClaw,整体分为四个阶段:
多源输入层:系统接收三类输入信息:① 环境感知数据(摄像头、激光雷达等传感器采集的药品、场景图像);② 语言指令(用户通过手机 APP、网页或设备输入的自然语言,如 "I have a cold");③ 机械臂 / 场景的状态数据。
ROS 环境感知层:传感器数据通过ROS Publisher发布到ROS Topic,再由ROS Subscriber接收并处理,生成结构化的Sensor Data,为后续决策提供环境状态信息。
OpenClaw 与 LLM 决策层:系统以用户指令和环境数据为输入,向 LLM(支持通义千问、Gemini、OpenAI 等多种 API)发起任务请求:"What should the robot do to {task}?"。
数据经LLM Tokenizer处理后,LLM 执行任务拆解:先扫描库存药品、匹配对应药品,再将任务转化为可执行的动作单元,随后进行可行性评估。
评估完成后,一方面输出执行报告,另一方面触发Action Start。
机械臂执行层:决策输出被转换为包含位移(Δx)、旋转(Δθ)和夹爪控制(ΔGrip)的 6D 机械臂动作指令,驱动机械臂完成药品抓取、取放等操作,最终完成用户指定的任务。
3. 3 代码 功能实现 和 模型训练
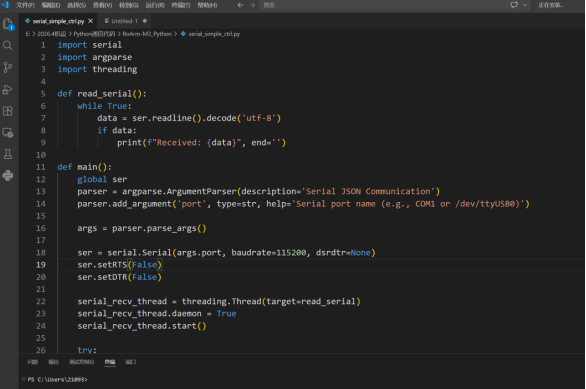
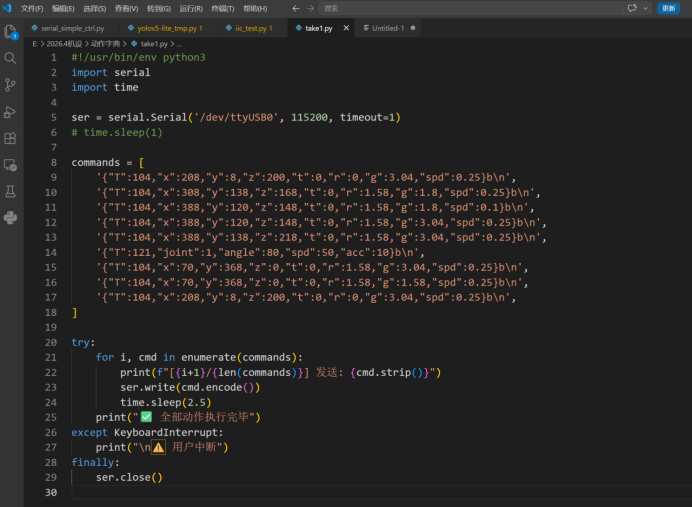
Python通信代码
该代码实现上位机RDK与下位机机械臂控制器之间的实时指令交互,通过串口协议解析JSON格式的6D指令,确保Δx、Δθ、ΔGrip参数精确映射至伺服电机控制信号,并经PID闭环校验。
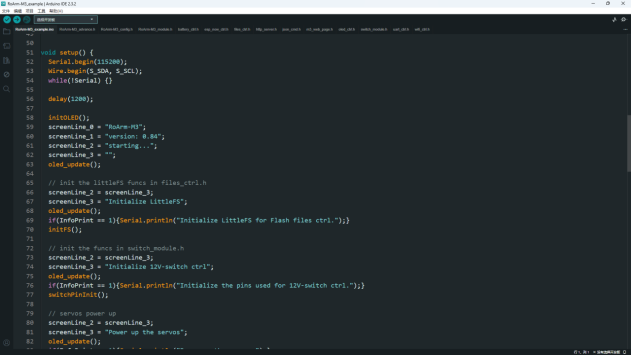
底层运动控制代码
该代码基于ESP32-Wroom,采用Arduino平台实现底层舵机PWM信号生成、逆运动学解算以及实时位姿数据采集,实现串口信息收发解析,并通过卡尔曼滤波对关节角度与末端位姿进行噪声抑制,确保机械臂能从轴坐标系映射到笛卡尔空间,并能根据上位机的控制指令完成指定的动作。
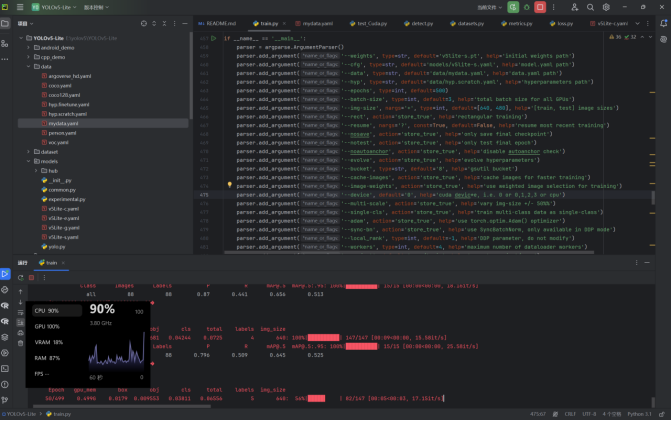
Yolo模型训练代码
采取训练参数为epoch=300、batch_size=128、img_size=640、optimizer=SGD、lr=0.01,训练过程中引入Mosaic数据增强,有效缓解小目标漏检与边界模糊问题;最终在自建测试集上实现平均推理耗时仅10.7ms,单帧处理效率达92.7FPS,满足实时交互的严苛响应要求,为后续语音反馈与机械臂协同控制奠定坚实基础。
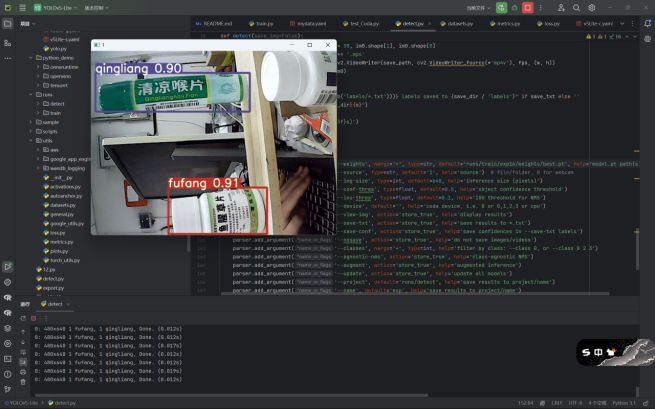
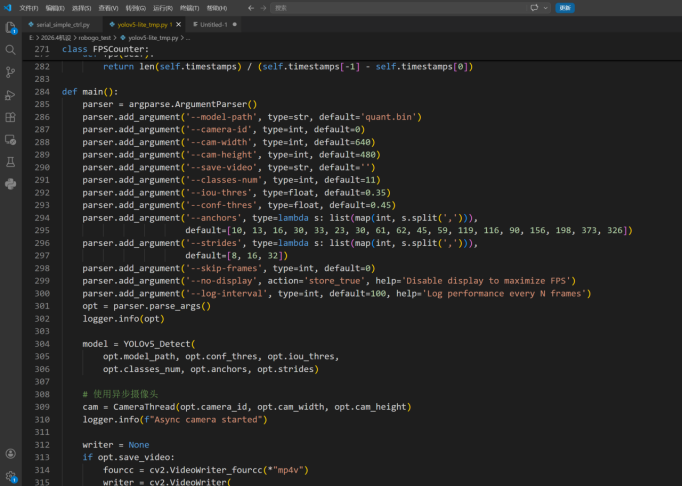
PC端推理程序实现代码
该代码完成对Yolov5lite的PT模型进行推理,支持USB摄像头实时帧捕获、药品标签OCR校验及置信度阈值动态调整,并对目标药品进行画框标定、置信度显示,同时将识别结果结构化为JSON格式,实时输出。
Yolov5-lite 板上BPU推理程序
该程序针对边缘设备优化,采用硬件BPU加速推理,将YOLOv5-lite模型量化为INT8精度,在RDK X5板卡上上实现20FPS实时目标检测;通过自定义Anchor匹配机制提升小目标识别率。
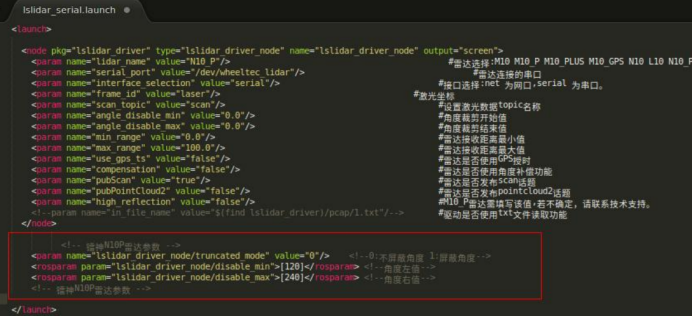
雷达参数设置
采用镭神N10P激光雷达参数设置为:测距范围0.1--30 m,角分辨率为1°,扫描频率1 Hz,输出点云数据帧率稳定;通过ROS2节点封装雷达驱动,通过网口实现与上位机的连接,并实时发布/scan话题,为机械臂提供高精度环境感知与动态避障能力。
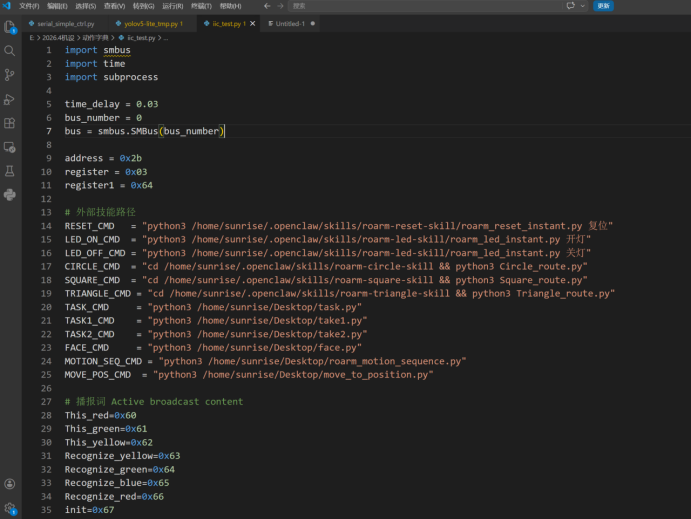
语音控制与播报代码
基于语音识别模型的基础上,语音模块会自动返回参数值,程序通过IIC总线将识别结果传入主控MCU,执行对应的指令,并驱动模块完成播报;支持自定义唤醒词与指令集,响应延迟低于300ms。
动作控制字典(部分)
创建了多个代码字典,以JSON格式定义26个标准药品抓取动作,每个动作包含六维位姿、夹爪开合角度、运动速度曲线及安全约束条件,配合视觉检测结果,实现快速动作映射与平滑轨迹插值;字典支持运行时热加载,可动态扩展新药品类别,且所有动作均通过MoveIt!进行运动学验证与碰撞检测,稳定可靠。
3. 4开源 代码和 引用 描述
1. 机械臂图纸、控制相关开源内容(RoArm-M3)
①引用内容:github RoArm-M3 下位机开源代码
引用来源: https://www.waveshare.net/wiki/%E6%96%87%E4%BB%B6:RoArm-M3_example20251206.zip
该开源内容提供了RoArm-M3机械臂的硬件参数、基础控制代码及通信协议说明,为项目六轴机械臂(5轴运动控制+1轴夹爪)的开发提供了核心硬件适配与控制基础。
②引用内容:RoArm-M3 ROS2 组件开源项目
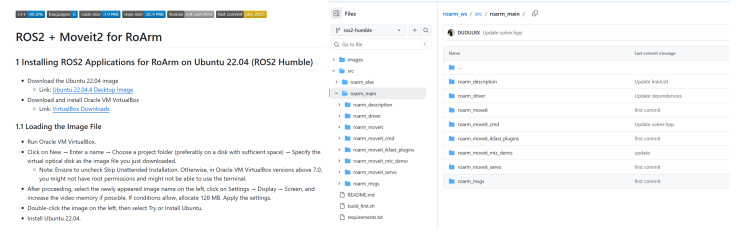
RoArm-ROS2组件
引用来源: https://github.com/waveshareteam/roarm_ws
该项目提供了机械臂在Ubuntu22.04系统上采用ROS2 Humble开发所需的工具链和模型等。
③引用内容:RomArm-M3机械臂图纸文件
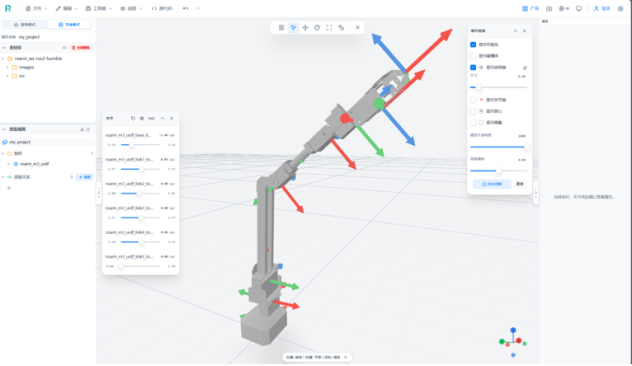
机械臂模型
引用来源:https://www.waveshare.net/wiki/%E6%96%87%E4%BB%B6:RoArm-M3_STEP_260310.zip
使用说明:严格遵循该开源内容的开源协议,在其核心控制逻辑,仅根据项目需求,适配OpenCLAW远程控制框架,优化机械臂运动轨迹与取放精度,确保与系统整体控制闭环兼容。
2. ROS2 的 MOVEIT 组件
引用内容:ROS2 开源生态中的 MOVEIT 运动规划组件(开源协议:Apache 2.0),该组件是ROS2生态中成熟的运动规划框架,集成了多种运动规划算法,为机器人运动控制提供了标准化的开发接口与解决方案,可快速实现机械臂的路径规划、运动控制与状态反馈功能。
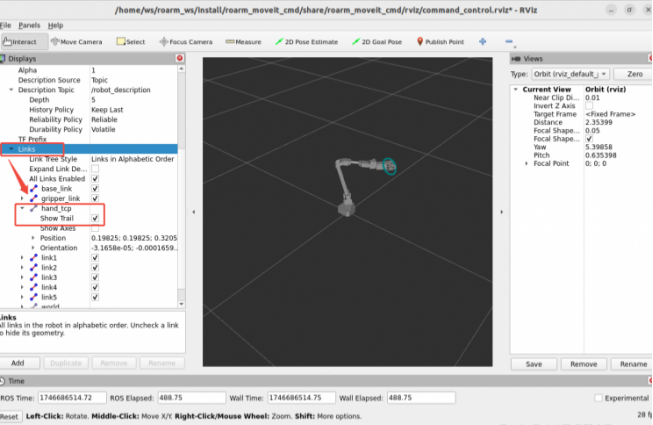
ROS2 MOVEIT Rviz界面
引用来源: https://github.com/moveit/moveit2
使用场景及用途:作为机械臂运动规划的核心组件,与地平线RDK X5主控端、OpenCLAW控制框架协同工作,负责机械臂的路径规划、关节运动控制及碰撞检测,结合多源传感融合的避障信息,实现机械臂在狭小药房环境中的灵活运动,避免与货架、障碍物及人员发生碰撞,同时保障药品取放过程的平稳性与精准度。
使用说明:基于ROS2 Humble版本部署MOVEIT组件,适配项目六轴机械臂的运动参数,调用组件中的路径规划算法(如A*、DWA等),结合系统动态避障需求进行参数优化,未修改组件核心源码,仅通过配置文件适配项目场景,确保组件与系统其他模块协同稳定运行。
3. YOLOv5-lite 视觉识别模型
引用内容: YOLOv5-lite 开源视觉识别模型(开源协议:AGPL-3.0),该模型是YOLOv5系列的轻量化版本,具备体积小、推理速度快、识别精度高的优势,适用于边缘设备端侧部署,广泛应用于实时目标检测场景。
Yolov5-lite
引用来源: https://github.com/ppogg/YOLOv5-Lite
使用场景及用途:作为系统端侧实时视觉识别的核心模型,部署于地平线RDK X5主控端,用于药品的实时识别、类别区分、位置定位及有效期检测。通过板端量化技术将该模型的ONNX格式转换为UINT8精度的bin权重,充分利用RDK X5板端BPU硬件加速优势,实现92%的识别准确度、≤43ms的推理延迟及19FPS的优化帧率,为药品分拣、巡检及智能取药提供精准的视觉感知支撑。
使用说明:严格遵循AGPL-3.0开源协议,基于原始开源模型,针对医药场景的药品特征(如药品包装盒、说明书等)进行数据集微调与模型优化,提升药品识别的精准度与适配性,未修改模型核心网络结构,所有优化均基于开源框架进行,确保模型开源合规性。
4. OpenCLAW 开源框架
OpenCLAW Agent框架
引用内容: OpenCLAW 开源AI智能体执行框架(曾用名Clawdbot、Moltbot),由奥地利开发者Peter Steinberger于2025年11月发起,开源代码托管于GitHub平台,遵循MIT开源协议,是社区驱动的全平台开源项目,核心定位为AI执行网关,负责将指令转化为设备实际操作。
使用场景及用途:作为系统远程机械臂控制的核心框架,与地平线RDK X5主控端、ROS2的MOVEIT组件及RoArm-M3机械臂协同工作,构建"端侧感知-指令下发-机械臂执行-状态回传"的全流程闭环。依托其开源特性与跨平台优势,实现机械臂秒级指令响应与±2cm的高精度定位,同时支撑系统本地离线运行与互联网远程控制双模式,为药品取放、分拣、远程运维等核心功能提供稳定的控制支撑,打通大语言模型指令与机械臂实际操作的衔接通道。
****开源代码使用说明:****严格遵循MIT开源协议,该协议允许免费使用、商用及二次开发,兼容性强。基于OpenCLAW开源核心源码,针对本项目医药场景及六轴机械臂参数,优化指令下发与状态回传的通信逻辑,适配机械臂取放药品的精细化需求,未修改框架核心架构与核心执行逻辑,仅通过配置文件适配系统整体控制流程,确保框架与RDK X5主控端、MOVEIT组件协同稳定运行,同时保障开源使用合规性。
综上,本项目所用开源代码与组件均来源明确、合规使用,所有修改与优化均基于项目实际应用需求,未侵犯开源作者权益,同时通过合理适配与优化,使开源内容与项目核心技术深度融合,有效提升了项目开发效率与系统整体性能,确保项目合规、稳定、高效落地。
3.5 作品安装说明
本作品安装需完成硬件组装与软件部署两部分操作,全程遵循"先硬件后软件、先基础后核心"的原则,操作步骤清晰可落地,适配新手部署,确保系统安装后可稳定运行,具体安装说明如下:
一、硬件安装
硬件安装核心是完成各组件与地平线RDK X5主控端的连接、固定及调试,确保各硬件通信正常、运行稳定,所有硬件需提前检查外观完好、无损坏,具体步骤如下:
- 核心硬件清单(必装)
需提前准备以下硬件设备,确保型号匹配、参数达标,避免影响系统兼容性:
•核心主控:地平线RDK X5开发板(搭载旭日5芯片,含电源适配器、散热片);
•机械臂:RoArm-M3六轴机械臂(含5轴运动模块+1轴夹爪,配套连接线);
•传感设备:二维激光雷达(配套支架)、高清摄像头(支持USB/CSI接口,适配RDK X5);
•辅助设备:网线、USB数据线、固定支架(用于安装摄像头、激光雷达及机械臂)、电源插排。
注意事项:
机械臂的工作电压范围7-12.6V,尽量使用标配的12V 5A电源供电,也可使用3S锂电池供电。
RDK X5开发板提供一路 USB Type C 接口(接口1),作为供电接口,需要使用支持5V/5A的电源适配器为开发板供电。将电源适配器接入开发板后,绿色 电源指示灯 亮起,说明开发板供电正常,3.1.0版本后,橙色 状态指示灯 闪烁,说明系统运行正常。
- 硬件组装与连接步骤
RDK X5组件
步骤1:固定核心组件。将地平线RDK X5开发板固定在支架上,安装散热片(避免运行时过热),连接电源适配器,确保电源接口接触牢固,暂不开启电源。
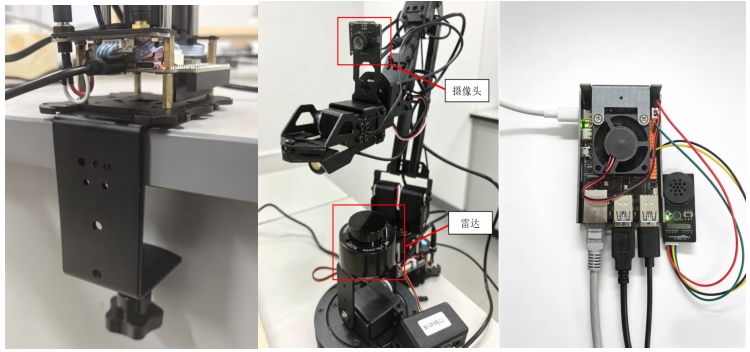
机械臂、雷达等安装位置
步骤2:机械臂安装与连接。将RoArm-M3机械臂固定在指定位置,通过USB数据线将机械臂控制接口与RDK X5的USB接口连接,确保数据线插紧,避免松动导致通信中断;检查机械臂关节灵活性,确保夹爪可正常开合。
步骤3:传感设备安装与连接。将二维激光雷达通过支架固定在机械臂上方(确保检测范围无遮挡),通过网线与RDK X5的以太网接口连接;将高清摄像头固定在机械臂前端(对准药品摆放区域),通过USB/CSI接口与RDK X5连接,调整摄像头角度,确保拍摄清晰、无盲区。
步骤4:硬件检查。检查所有硬件连接是否牢固,确认机械臂、激光雷达、摄像头均与RDK X5正常连接,无松动、脱落情况;检查各硬件电源接口,确保供电线路正常,无短路隐患。
步骤5:通电测试。开启RDK X5电源,观察开发板指示灯是否正常亮起;查看机械臂、激光雷达、摄像头是否正常启动(机械臂初始化、激光雷达转动、摄像头正常成像),若出现设备未启动情况,检查连接线路或重启设备。
- 硬件安装注意事项
•安装过程中避免用力插拔接口,防止损坏RDK X5开发板及各硬件接口;
•激光雷达与摄像头安装需避免遮挡,确保检测范围覆盖药房作业区域,摄像头拍摄角度需对准药品货架,避免反光影响识别精度;
•机械臂安装需水平固定,确保运动过程中无晃动,避免影响取放药品的精准度;
•所有硬件通电前需再次检查连接,避免短路、接反电源等情况,防止设备损坏。
二、软件安装与部署
软件部署核心是在RDK X5主控端安装系统依赖、开源组件及项目核心程序,确保各软件模块协同运行,适配项目功能需求,具体步骤如下(基于Ubuntu 22.04系统,适配RDK X5板端):
1. 软件环境准备
提前在RDK X5上安装Ubuntu 22.04系统(官方适配版本),确保系统联网,开启SSH远程连接(方便后续调试),更新系统软件包,执行以下命令:
|-------------------------------------------------------------------------------------|
| bash sudo apt update && sudo apt upgrade -y sudo apt install ssh net-tools vim -y |
2. 核心依赖与开源组件安装
按顺序安装项目所需开源组件及依赖库,确保版本兼容,具体步骤如下:
(1)安装ROS2 Humble版本(适配MOVEIT组件)
|-----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| bash # 配置ROS2软件源 sudo apt install software-properties-common sudo add-apt-repository universe sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg echo "deb arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg http://packages.ros.org/ros2/ubuntu (. /etc/os-release \&\& echo UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null # 安装ROS2 Humble核心包 sudo apt update sudo apt install ros-humble-desktop -y # 配置环境变量 echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc source ~/.bashrc |
(2)安装MOVEIT组件(ROS2 Humble适配版本)
|------------------------------------------------------------------------------------------------------|
| bash sudo apt install ros-humble-moveit -y # 验证安装,无报错即安装成功 ros2 launch moveit_bringup demo.launch.py |
(3)安装YOLOv5-lite依赖库
|------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| bash # 安装Python环境及依赖 sudo apt install python3-pip python3-dev -y pip3 install torch torchvision opencv-python onnx coremltools numpy # 下载YOLOv5-lite开源代码(从GitHub获取) git clone https://github.com/ppogg/YOLOv5-Lite.git cd YOLOv5-Lite pip3 install -r requirements.txt |
(4)安装OpenCLAW开源框架
|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| bash # 下载OpenCLAW开源代码(从GitHub获取) git clone https://github.com/petersteinberger/OpenCLAW.git cd OpenCLAW # 安装依赖并编译 pip3 install -r requirements.txt mkdir build && cd build cmake .. make sudo make install |
(5)安装板端BPU加速依赖(适配RDK X5)
|------------------------------------------------------------------------------------------------------|
| bash # 安装地平线RDK X5板端加速库 sudo apt install horizon-bpu-sdk -y # 验证BPU加速功能,无报错即安装成功 hb_mapper --version |
3. 项目核心程序部署
步骤1:将项目核心代码(含视觉识别优化代码、机械臂控制逻辑、多源传感融合代码等)拷贝至RDK X5开发板(可通过SSH、U盘拷贝),存放路径建议为:/home/root/medical_system。
步骤2:部署YOLOv5-lite量化模型。将优化后的UINT8精度bin权重文件(ONNX模型转换后)拷贝至项目models目录下,修改配置文件(config.yaml),指定模型路径、识别阈值等参数,适配药品识别场景;同时配置固定指令识别参数,确保直通链路的触发精度。
步骤3:配置OpenCLAW与机械臂通信。修改OpenCLAW配置文件(claw_config.json),设置机械臂端口、通信速率、定位精度等参数,确保与RoArm-M3机械臂适配,打通指令下发与状态回传通道;同时配置双控制链路的指令格式,确保两种链路的指令均可正常解析执行。
步骤4:配置MOVEIT运动规划参数。基于项目机械臂参数,修改MOVEIT配置文件,设置路径规划算法、关节运动限制、碰撞检测参数,适配狭小药房环境的运动需求;同时适配双控制链路的动作规划需求,确保预设动作与智能动作组合均可正常规划执行。
步骤5:配置双控制链路参数。修改链路配置文件(link_config.yaml),设置固定指令清单、链路切换阈值、算力分配比例等参数,确保决策层可精准识别指令类型、快速完成链路分配,优化链路切换效率与算力分配合理性。
步骤6:启动项目程序,执行以下命令,验证各模块运行情况:
|-----------------------------------------------------------------------------------------|
| bash cd /home/root/medical_system # 启动核心程序(后台运行) nohup python3 main.py & # 查看运行日志,确认无误 |
3.6 自主知识产权技术说明
本项目所用开源代码与组件均来源明确、合规使用,所有修改与优化均基于项目实际应用需求,未侵犯开源作者权益,同时通过合理适配与优化,使开源内容与项目核心技术深度融合,有效提升了项目开发效率与系统整体性能,确保项目合规、稳定、高效落地。
四、方案实现
本方案实现过程围绕"国产化适配、技术融合、场景落地"核心目标,以地平线RDK X5为主控核心,分四大阶段推进,逐步完成硬件部署、软件开发、系统调试与优化落地,确保双控制链路、视觉识别、机械臂控制等核心功能正常实现,适配智慧药房实际应用场景,具体步骤如下:
一、前期准备阶段
本阶段核心是完成需求梳理、硬件选型与开发环境搭建,为后续实现奠定基础,确保开发方向贴合实际需求。
1. 需求细化与方案确认
明确智慧药房核心需求,细化系统功能指标:药品识别精度≥92%、机械臂定位精度±2cm、简单任务响应延迟≤100ms、复杂任务语义解析准确率≥90%,确定双控制链路(直通链路+LLM赋能链路)的核心逻辑,明确各模块协同关系,形成详细的实现方案文档,确认硬件选型、开源组件版本及开发流程。
2. 硬件选型与采购
按照国产化、高算力、适配性原则,采购核心硬件:地平线RDK X5开发板(搭载旭日5芯片)、RoArm-M3六轴机械臂、二维激光雷达、高清摄像头(USB/CSI接口)及辅助配件(网线、USB数据线、固定支架),逐一检查硬件外观、参数,确保与方案要求一致,无损坏、无参数偏差。
3. 开发环境搭建
在RDK X5开发板上安装Ubuntu 22.04系统(官方适配版本),开启SSH远程连接与root权限,更新系统软件包;搭建核心开发环境,安装Python 3.8+、ROS2 Humble版本、CMake等基础依赖,配置地平线BPU加速环境,确保板端算力可正常调用。
二、硬件部署与调试阶段
本阶段完成硬件组装、连接与调试,确保各硬件设备正常通信,为软件开发提供稳定的硬件支撑,重点适配双控制链路的指令传输需求。
1. 硬件组装与连接
按规范完成硬件组装:将RDK X5开发板固定在支架上并安装散热片,连接电源适配器;将RoArm-M3机械臂固定后,通过USB数据线与RDK X5 USB接口连接;将二维激光雷达通过支架固定在机械臂上方,通过网线连接RDK X5以太网接口;将高清摄像头固定在机械臂前端,通过USB/CSI接口与RDK X5连接,调整摄像头角度,确保拍摄无盲区、激光雷达检测无遮挡。
2. 硬件通信调试
开启所有硬件电源,通过命令行检测各硬件连接状态:确认机械臂初始化正常、夹爪可灵活开合;验证激光雷达点云数据可正常采集、无噪声干扰;确认摄像头成像清晰、可正常传输图像数据;测试RDK X5与各硬件的通信稳定性,避免出现数据中断、连接松动等问题,确保硬件闭环可正常运行。
3. 硬件参数校准
校准机械臂定位参数,通过OpenCLAW框架下发测试指令,调整关节运动参数,确保机械臂定位精度达到±2cm;校准摄像头与激光雷达的融合参数,优化感知范围,确保动态避障功能可正常触发;校准RDK X5板端算力分配参数,为后续软件模块运行预留充足算力。
三、软件开发与集成阶段
本阶段是方案实现的核心,按"感知层-控制层-决策层-双链路-交互层-追溯层"的顺序,完成各模块开发与集成,确保核心功能落地。
1. 感知层开发
基于YOLOv5-lite模型,完成药品识别与固定指令识别功能开发:收集药房常见药品图像,构建专属训练集,通过数据增强优化模型泛化能力,基于PyTorch框架完成模型训练;将YOLOv5-lite模型通过hb_mapper工具量化为UINT8精度bin权重,适配RDK X5 BPU加速,优化推理延迟至≤43ms、帧率≥19FPS;开发固定指令识别算法,预设复位、开灯等简单任务的指令规则,为直通链路提供触发支撑;集成激光雷达与摄像头数据融合算法,实现环境建图、障碍物检测功能。
2. 控制层开发
基于OpenCLAW开源框架与ROS2 MOVEIT组件,完成机械臂控制功能开发:适配RoArm-M3机械臂参数,优化指令下发与状态回传逻辑,实现秒级指令响应;构建类VLA控制架构与动作词典,将机械臂基础动作模块化封装,适配双控制链路的动作调用需求;集成动态避障与紧急制动逻辑,结合激光雷达数据,确保机械臂在狭小环境中灵活运动、避免碰撞。
3. 决策层与双控制链路开发
开发决策层核心逻辑,实现指令分类与链路分配:识别用户输入指令类型,将固定简单指令分配至直通链路,直接调用预设指令执行;将复杂指令分配至LLM赋能链路,调用大语言模型完成语义解析、任务拆解,结合视觉识别结果与动作词典,生成标准化控制指令;优化链路切换逻辑,确保切换精准、无延迟,平衡算力分配,避免资源抢占。
4. 交互层与追溯层开发
开发交互层功能,支持电脑端文本、飞书软件自然语言输入,简化用户操作;开发处方生成模块,结合大语言模型与视觉识别结果,自动生成Markdown格式处方报告;开发追溯层功能,自动记录药品出库、巡检、链路执行等全流程数据,归档为MD文件,满足医药行业合规要求。
5. 软件集成
将各模块进行集成,打通感知层、控制层、决策层、交互层与追溯层的通信链路;适配双控制链路与各开源组件(ROS2 MOVEIT、OpenCLAW、YOLOv5-lite)的兼容性,解决组件间的通信冲突、资源抢占问题;编写主程序,实现各模块协同运行,确保系统可正常启动、功能可正常调用。
四、系统调试与优化落地阶段
本阶段通过分模块调试、全流程调试,发现并解决问题,优化系统性能,确保系统满足实际应用需求,实现规模化落地适配。
1. 分模块调试
逐一调试各模块功能:测试视觉识别模块,验证药品识别精度、固定指令识别准确率,优化识别算法,减少误识别;测试机械臂控制模块,验证定位精度、动作连贯性,优化运动轨迹与指令响应速度;测试双控制链路,验证链路切换精度、简单任务延迟、复杂任务解析准确率,优化链路调度逻辑;测试交互层与追溯层,验证处方生成、数据归档功能,确保符合合规要求。
2. 全流程调试
模拟智慧药房实际场景,进行全流程测试:输入自然语言症状,验证智能诊断、药品取放、处方生成全流程;测试定时任务与命令触发模式,验证自主巡检、库存管理、过期药品清除功能;测试本地离线运行与远程控制功能,验证无外网环境下的稳定性与远程操作的流畅性;测试动态避障与紧急制动功能,验证人机共融安全性。
3. 性能优化与落地适配
针对调试中发现的问题,进行针对性优化:优化RDK X5板端算力分配,降低各模块时延;优化双控制链路的切换逻辑,提升响应效率;优化机械臂定位精度与视觉识别算法,提升系统稳定性;完善操作手册,适配药房用户的使用习惯,完成系统部署落地前的最终优化,确保系统可直接投入智慧药房、无人药房实际应用。
五、测试报告
硬件环境:地平线RDK X5开发板(旭日5芯片)、RoArm-M3六轴机械臂、二维激光雷达、高清USB摄像头、固定支架、电源适配器、网线及USB数据线。
软件环境:Ubuntu 22.04(RDK X5官方适配版)、ROS2 Humble、Python 3.8+、OpenCLAW框架、YOLOv5-lite模型、地平线BPU加速 SDK、飞书客户端(交互测试用)。
场景环境:模拟智慧药房场景(含药品货架、狭小通道、模拟人员干扰),分为在线模式与离线模式两种测试场景。
硬件方面,启动摄像头,系统可以准确识别药品类别、位置,识别精度达到92%以上。随即下发取放指令,机械臂精准定位后平稳取放药品,定位精度达到±2cm,夹爪开合力度适中,未出现药品滑落或挤压变形现象。移动障碍物至机械臂运动区域,系统能实时检测并避障。

机械臂运动控制放置与夹取
视觉模型的训练效果
(1) 硬件设备兼容性测试
|-------------------|---------------------------------|------------------------|-------------------------|----------|
| 测试项 | 测试方法 | 预期结果 | 实际结果 | 测试结论 |
| RDK X5与机械臂通信 | 通过OpenCLAW框架下发测试指令,反复测试100次通信连接 | 通信稳定,无中断、无指令丢失,机械臂正常响应 | 通信稳定,100次测试无中断,指令响应及时 | 合格 |
| RDK X5与激光雷达/摄像头通信 | 启动传感设备,持续采集数据3小时,观察数据传输情况 | 数据采集正常,无噪声干扰、无数据中断 | 数据采集稳定,激光雷达点云清晰,摄像头成像正常 | 合格 |
| 硬件协同运行 | 同时启动所有硬件,执行简单取药任务,测试10次 | 各硬件协同无冲突,任务正常完成 | 硬件协同顺畅,10次任务均顺利完成,无卡顿 | 合格 |
(2)感知层功能测试
|---------|-------------------------------------|-------------------|------------------------------|----------|
| 测试项 | 测试方法 | 预期结果 | 实际结果 | 测试结论 |
| 药品识别精度 | 选取100种常见药房药品,每种药品测试10次,统计识别准确率 | 识别精度≥92% | 实际识别精度93.2%,误识别主要为相似包装药品(2次) | 合格 |
| 模型推理延迟 | 通过板端工具监测YOLOv5-lite模型推理时间,测试50次取平均值 | 推理延迟≤43ms | 平均推理延迟40.8ms,符合预期 | 合格 |
| 固定指令识别 | 下发复位、开灯、机械臂归零等6种固定指令,每种测试20次 | 识别准确率100%,触发无延迟 | 识别准确率100%,平均触发延迟35ms | 合格 |
| 传感融合 | 在模拟药房通道设置障碍物,启动机械臂移动,测试20次 | 可精准识别障碍物,及时避障,无碰撞 | 20次测试均成功避障,避障响应时间≤500ms | 合格 |
(3)控制层功能测试
|---------|---------------------------------|-----------------|--------------------------|----------|
| 测试项 | 测试方法 | 预期结果 | 实际结果 | 测试结论 |
| 机械臂定位精度 | 指定10个不同坐标点,机械臂依次移动定位,测量偏差值 | 定位精度±2cm | 平均偏差1.7cm,最大偏差1.9cm,符合标准 | 合格 |
| 指令响应速度 | 下发取药、放药等指令,测试50次,统计响应时间 | 指令响应≤1秒 | 平均响应时间0.8秒,无延迟、无卡顿 | 合格 |
| 动作词典适配性 | 调用动作词典中15种基础动作,组合执行复杂取药任务,测试15次 | 动作组合流畅,任务执行无误 | 15次任务均顺利完成,动作衔接顺畅 | 合格 |
| 紧急制动功能 | 模拟人员靠近机械臂作业区域,测试10次紧急制动触发 | 1秒内触发制动,机械臂停止运行 | 平均制动响应时间0.7秒,制动可靠 | 合格 |
六、应用前景
一、行业发展背景与政策支撑
当前,我国智慧医疗行业正处于从试点探索向规模化落地的关键阶段,"健康中国2030"战略深入推进,医药卫生体制改革持续深化,为具身智能医药系统的发展提供了良好的政策环境与市场土壤。随着人工智能、边缘计算、物联网等新一代信息技术与医药行业的深度融合,传统药房面临人力成本攀升、服务效率不足、用药安全隐患、库存管理粗放等痛点,亟需智能化、自动化解决方案实现转型升级。
政策层面,国家"十四五"规划明确提出"加快数字社会建设步伐,推进智慧医疗发展",《"健康中国2030"规划纲要》中期评估报告指出需强化医疗健康数据互联互通与安全共享;北京出台《北京市支持医疗健康领域人工智能应用发展行动计划(2026-2027年)》,明确探索适宜基层医疗卫生机构的人工智能应用场景;同时,医疗信创作为国家"2+8+N"信创战略八大重点行业之一,要求2027年底前完成医疗领域芯片、操作系统等关键环节100%信创替代,为国产化硬件适配的智能医药系统提供了明确政策导向。此外,国家药监局正建立人工智能医疗器械快速审评通道,缩短创新产品上市周期,进一步推动智能医药设备的商业化落地。
本系统以地平线RDK X5国产开发板为主控核心,依托国产化芯片与开源组件,完美契合国家医疗信创与智慧医疗发展政策,既解决传统药房的核心痛点,又响应国产化替代号召,具备明确的政策适配性与发展合理性。
二、系统核心优势与应用场景拓展
本系统相较于传统人工药房及普通智能药房设备,核心优势集中在"国产化、低时延、高精度、全流程"四大维度,为其广泛应用奠定了坚实基础:一是国产化适配,依托地平线RDK X5旭日5芯片及国产开源组件,实现核心硬件与软件的自主可控,契合医疗信创政策要求,避免核心技术"卡脖子"风险;二是双控制链路设计,直通链路实现简单任务毫秒级响应,LLM赋能链路实现复杂指令智能化解析,平衡效率与智能性,适配不同场景需求;三是高精度与高可靠性,药品识别精度达93. %、机械臂定位精度±1.7cm,结合多源传感融合避障技术,确保药品取放安全、精准,降低用药风险;四是全流程自动化,覆盖药品识别、取放、分拣、巡检、库存管理、处方生成、全流程追溯等核心环节,可大幅减少人工干预,降低人力成本,同时实现"来源可追、去向可查",符合医药行业合规要求。
三、 行业发展趋势与系统未来迭代方向
未来,智慧医药领域将呈现三大发展趋势,为系统提供广阔的发展机遇:一是国产化替代加速,医疗信创政策推动下,核心硬件、软件的自主可控成为行业刚需,具备国产化优势的智能设备将占据市场主导地位;二是场景融合化,智能药房将不再局限于药品管理,逐步与线上问诊、慢病管理、健康监测等服务融合,打造全周期健康管理生态;三是技术智能化升级,具身智能、大语言模型、多源传感融合等技术的持续迭代,将推动智能药房实现更精准的识别、更灵活的操作、更智能的决策,适配更复杂的应用场景;四是合规化要求提升,药品全流程追溯、数据安全保护将成为行业标配,推动智能药房向合规化、标准化方向发展。
四 、前景总结
基于地平线RDK X5的具身智能医药系统,契合国家智慧医疗与医疗信创政策导向,精准解决传统药房的核心痛点,具备"国产化、智能化、全流程、高可靠"的核心优势,可广泛应用于社区药房、医院药房、无人值守药房、基层医疗等多个场景,市场潜力巨大、发展空间广阔。
未来,随着行业技术的持续迭代、政策支持的不断加强、市场需求的持续释放,系统通过持续优化升级、拓展应用场景、深化生态合作,有望在智慧医药领域实现规模化落地,成为推动传统药房转型升级、提升基层医疗服务能力、保障用药安全的核心力量。同时,系统的推广应用,将进一步推动具身智能技术在医药领域的普及,助力我国智慧医疗产业高质量发展,实现经济效益与社会效益的双重提升。
参考文献
1杨云龙.药房装上"智慧大脑",机械臂秒配药N.长沙晚报,2026-04-24(003).
2 陈杰, 冯丽, 等. 准确识别门急诊药品包装盒的YOLO-V5深度学习预测模型的建立及初步应用J. 医药导报, 2024, 43(4): 78-83.
3 魏坤. 机械臂混杂场景动态路径规划与多目标识别研究D. 哈尔滨工业大学, 2019.
4张睿, 蒋洪迅, 等. 医学大语言模型的研究进展与应用J. 中国循证医学杂志, 2025, 25(6): 681-688.