概述
汽车控制臂(Control Arm)是悬架系统的关键部件,其核心作用是将车轮与车架连接,并在车辆行驶过程中承受并传递来自车轮的多方向力和力矩。拓扑优化的目标是在给定的设计空间、材料和工况下,找到材料的最优分布,使结构在满足多种性能要求(如刚度、强度、频率)的同时,实现轻量化。
"多工况加权柔度响应"指的是将结构在多种不同载荷工况下的柔度(Compliance) 进行加权求和,作为拓扑优化的目标函数或约束条件。柔度是刚度的倒数,柔度越小,意味着刚度越大。
一、核心概念解析
- 拓扑优化(Topology Optimization):
· 一种结构优化方法,用于确定结构内部孔洞的数量、位置和形状以及连接方式,从而得到最优的材料布局。
· 常用方法:变密度法(SIMP - Solid Isotropic Material with Penalization),该方法将每个单元的密度作为设计变量,通过插值模型将其与材料弹性模量关联,并通过惩罚因子迫使中间密度向0-1(孔洞-实体)两极分化。
- 柔度(Compliance):
· 外力所做的功。柔度越小,结构在该载荷下的刚度越大,抵抗变形的能力越强。
- 多工况(Multi-Load Case):
· 控制臂在实际工作中会同时承受多种载荷,例如:
· 垂直工况:来自地面的垂向冲击力。(影响平顺性)
· 制动工况:车辆制动时产生的纵向力。(影响制动稳定性)
· 转弯工况:车辆过弯时产生的侧向力。(影响操纵稳定性)
· 单一工况优化结果往往只对该工况有利,而无法在其他工况下表现良好。多工况优化旨在找到一个"折衷"的、全局性能最优的设计。
- 加权求和(Weighted Sum):
· 由于不同工况的重要性不同,为每个工况的柔度赋予一个权重因子,构建一个综合的目标函数。
· 权重的选择基于工程经验和对性能的侧重(例如,更注重操控性则给转弯工况更高权重)。
二、实施流程与步骤
- 定义设计空间:
· 根据控制臂的安装点(衬套和球铰)和轮毂连接点,创建一个尽可能大的包络体(Bounding Box)作为初始设计区域。本文摆臂设计空间与非设计空间如图1所示:
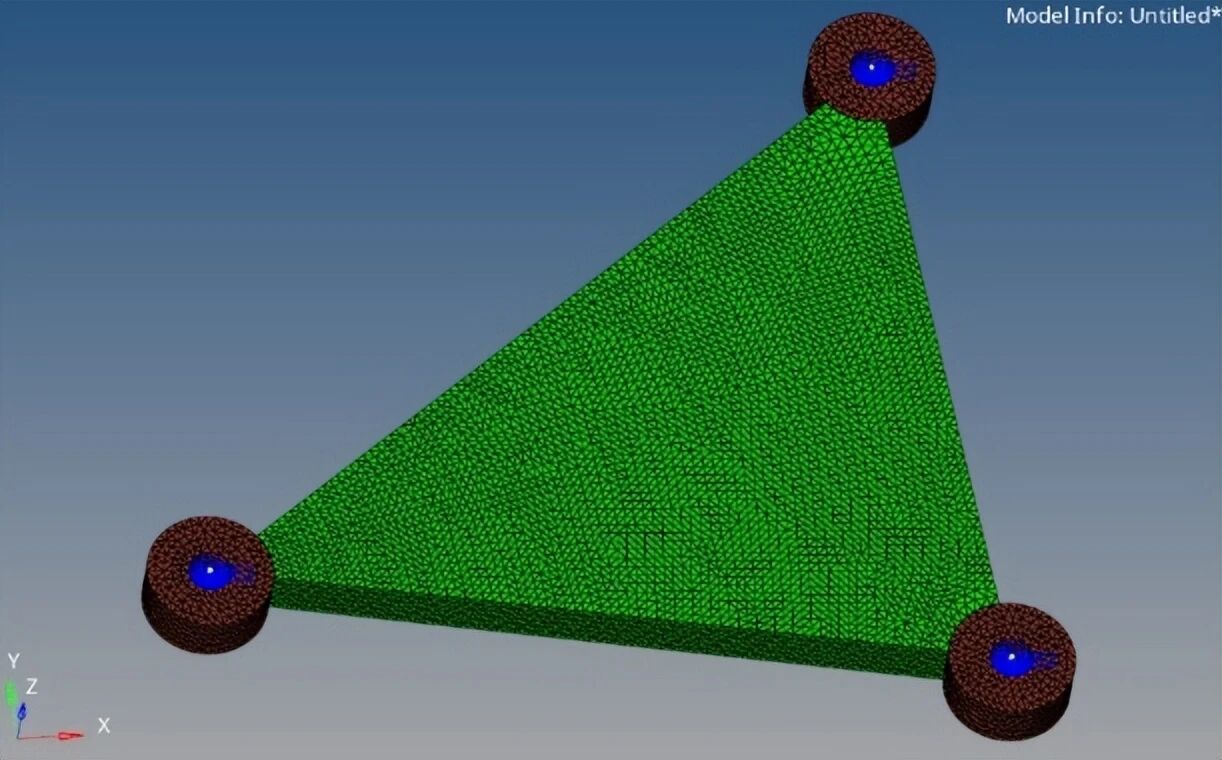
图1 摆臂拓扑优化模型
- 设定非设计区域:
· 关键区域:安装点(必须保留实体以安装衬套和球铰)、与车轮连接的螺栓孔等。这些区域在优化中保持不变。
- 施加工况与载荷:
· 基于ADAMS/Car等多体动力学仿真或台架试验数据,提取各典型工况下控制臂各连接点处的力和力矩。
· 垂向工况:在球铰处施加Z向力,大小为18522N。
· 制动工况:在球铰处施加-X向力,大小为-7938N。
· 侧向工况:在球铰处施加Y向力,大小为5292N。
· 正确施加边界条件,本文约束控制臂前点和后点平动自由度,静强度工况分析如图2所示:
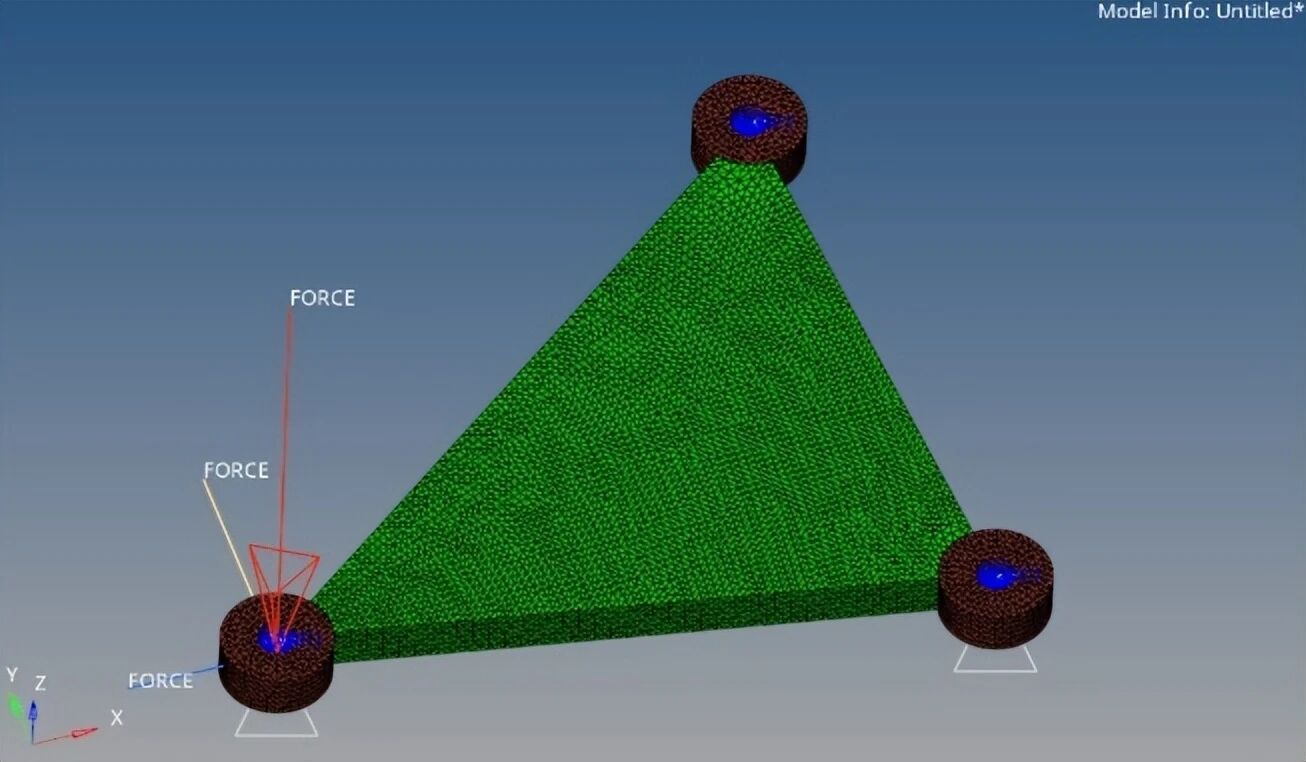
图2 摆臂拓扑优化静强度工况
- 分配权重:
· 与设计工程师共同确定各工况的权重。例如,如果车辆更注重舒适性,则垂向工况权重可设为0.5,制动和侧向各0.25。如图3所示:
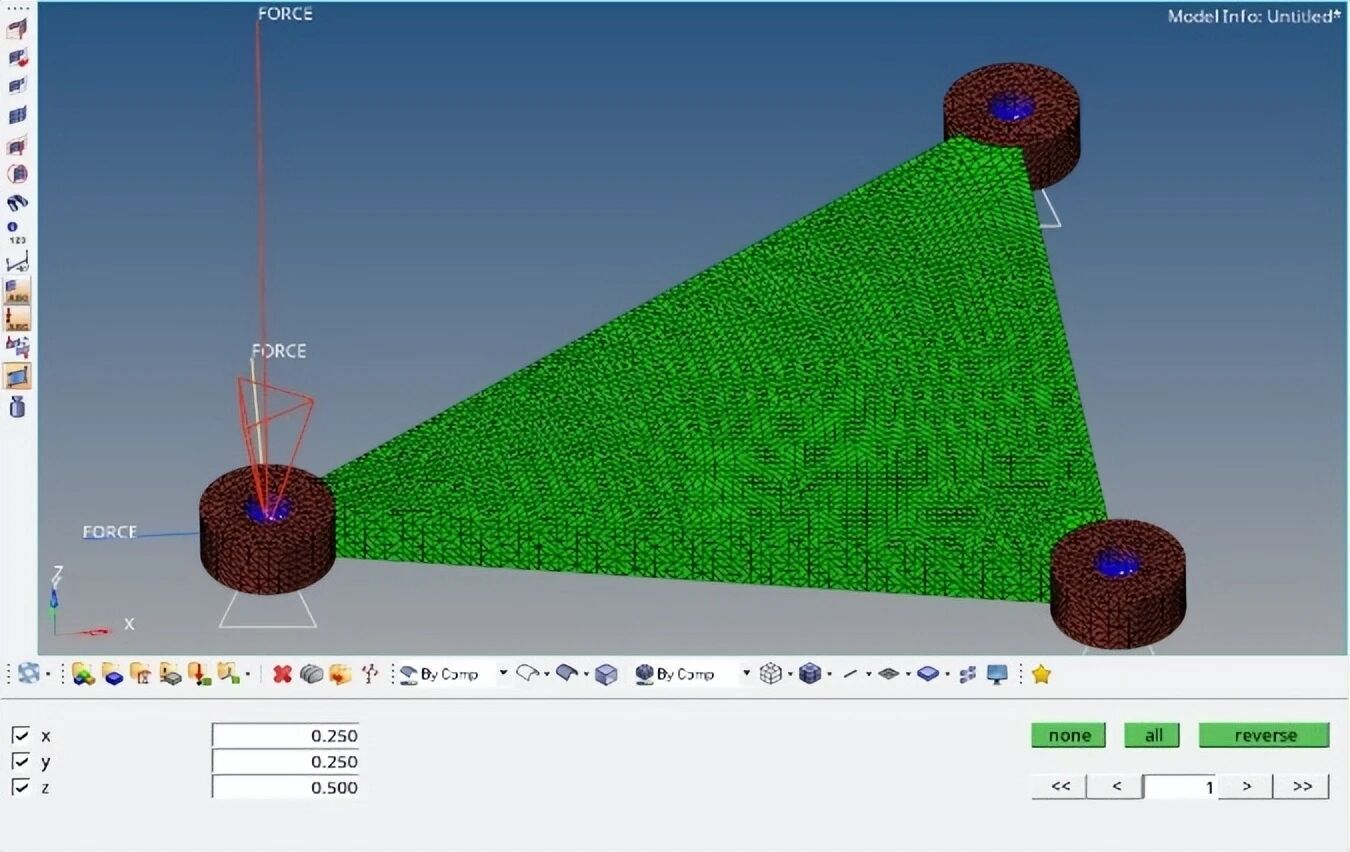
图3 加权柔度响应设置
- 设置优化参数:
· 目标体积分数:设置为0.3(即最终材料用量为设计空间的30%),设置如图4所示。

图4 体积分数约束设置
· 优化目标:以最小柔度作为优化目标,设置如图5所示。

图5 优化最小柔度设置
· 惩罚因子p:通常为3。
· 滤波:必须采用灵敏度滤波或密度滤波来抑制棋盘格现象并确保 mesh-independence。
- 求解迭代:
· 使用优化算法(如OC( Optimality Criteria)法或MMA(Method of Moving Asymptotes))进行迭代求解。迭代过程如图6所示:
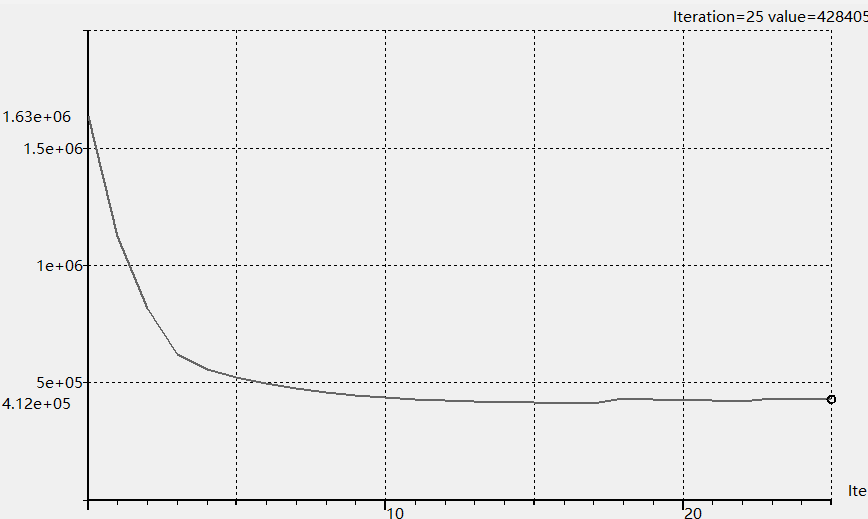
图6 优化目标迭代过程
· 流程为:有限元分析(FEA)求解各工况位移 → 计算各工况柔度和总目标函数 → 计算目标函数和约束的灵敏度 → 更新设计变量(单元密度)→ 收敛判断。
- 结果后处理与解读:
· 优化结果是一个密度在0-1之间分布的云图。最终优化结果单元密度云图如图7所示
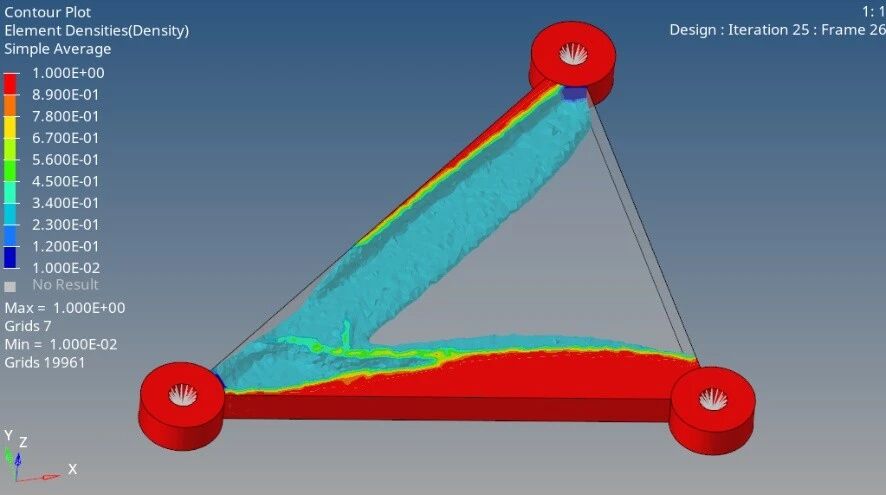
图7 优化结果单元密度云图
· 需要对其进行解读和重构,将连续的密度分布转化为清晰的工程概念模型。这通常需要工程师的经验,将材料富集区域解释为梁、板等结构。
· 注意:拓扑优化结果是一个初步概念设计,不能直接用于制造,必须进行详细的CAD重构和CAE验证。
三、挑战与注意事项
· 权重因子的敏感性:不同的权重分配会导致截然不同的拓扑结构,需要根据工程目标进行多次试算和调整。
· 模态频率约束:有时为了控制NVH(噪声、振动与平顺性)性能,需要在优化中加入频率约束(如一阶模态频率>某个值)。
· 应力约束:柔度优化不能直接控制应力,最优刚度设计可能存在应力集中。通常的流程是先进行柔度拓扑优化得到概念构型,再进行尺寸和形状优化来细化并校核应力。
· 工艺约束:需要考虑制造工艺,如压铸、锻造或钣金冲压。先进的拓扑优化软件可以添加拔模方向、对称性、最小尺寸等制造约束。
四、总结
基于多工况加权柔度响应的拓扑优化是汽车控制臂轻量化设计的强大工具。它通过一个系统的、数学驱动的过程,帮助工程师从无到有地发现既满足多种性能要求又极致轻量化的创新结构方案,是现代CAE驱动设计(CAE-Driven Design)的典范。
其核心思想是:通过加权求和将复杂的多目标问题转化为单目标问题,利用变密度法迭代寻找材料的最佳布局,最终得到一个综合性能最优的轻量化概念结构。
最后,欢迎通过公众号"320科技工作室"与我们联络
概述
汽车控制臂(Control Arm)是悬架系统的关键部件,其核心作用是将车轮与车架连接,并在车辆行驶过程中承受并传递来自车轮的多方向力和力矩。拓扑优化的目标是在给定的设计空间、材料和工况下,找到材料的最优分布,使结构在满足多种性能要求(如刚度、强度、频率)的同时,实现轻量化。
"多工况加权柔度响应"指的是将结构在多种不同载荷工况下的柔度(Compliance) 进行加权求和,作为拓扑优化的目标函数或约束条件。柔度是刚度的倒数,柔度越小,意味着刚度越大。
一、核心概念解析
- 拓扑优化(Topology Optimization):
· 一种结构优化方法,用于确定结构内部孔洞的数量、位置和形状以及连接方式,从而得到最优的材料布局。
· 常用方法:变密度法(SIMP - Solid Isotropic Material with Penalization),该方法将每个单元的密度作为设计变量,通过插值模型将其与材料弹性模量关联,并通过惩罚因子迫使中间密度向0-1(孔洞-实体)两极分化。
- 柔度(Compliance):
· 外力所做的功。柔度越小,结构在该载荷下的刚度越大,抵抗变形的能力越强。
- 多工况(Multi-Load Case):
· 控制臂在实际工作中会同时承受多种载荷,例如:
· 垂直工况:来自地面的垂向冲击力。(影响平顺性)
· 制动工况:车辆制动时产生的纵向力。(影响制动稳定性)
· 转弯工况:车辆过弯时产生的侧向力。(影响操纵稳定性)
· 单一工况优化结果往往只对该工况有利,而无法在其他工况下表现良好。多工况优化旨在找到一个"折衷"的、全局性能最优的设计。
- 加权求和(Weighted Sum):
· 由于不同工况的重要性不同,为每个工况的柔度赋予一个权重因子,构建一个综合的目标函数。
· 权重的选择基于工程经验和对性能的侧重(例如,更注重操控性则给转弯工况更高权重)。
二、实施流程与步骤
- 定义设计空间:
· 根据控制臂的安装点(衬套和球铰)和轮毂连接点,创建一个尽可能大的包络体(Bounding Box)作为初始设计区域。本文摆臂设计空间与非设计空间如图1所示:
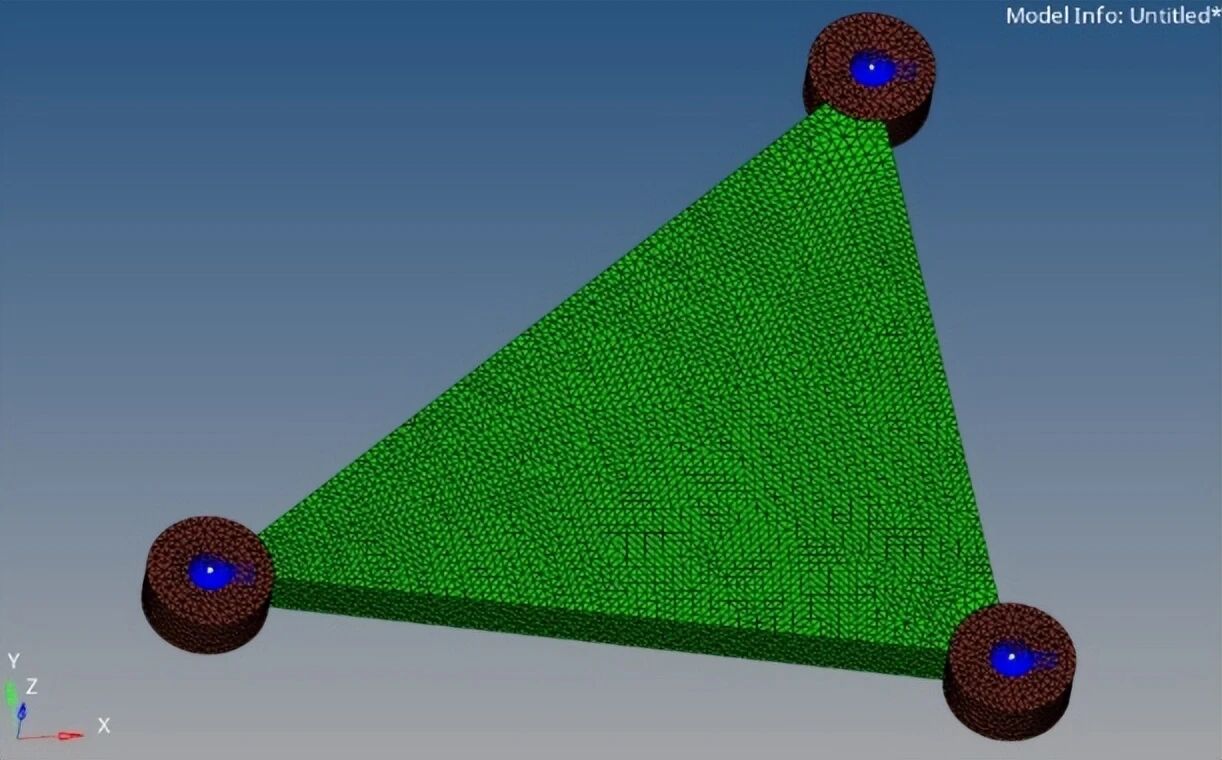
图1 摆臂拓扑优化模型
- 设定非设计区域:
· 关键区域:安装点(必须保留实体以安装衬套和球铰)、与车轮连接的螺栓孔等。这些区域在优化中保持不变。
- 施加工况与载荷:
· 基于ADAMS/Car等多体动力学仿真或台架试验数据,提取各典型工况下控制臂各连接点处的力和力矩。
· 垂向工况:在球铰处施加Z向力,大小为18522N。
· 制动工况:在球铰处施加-X向力,大小为-7938N。
· 侧向工况:在球铰处施加Y向力,大小为5292N。
· 正确施加边界条件,本文约束控制臂前点和后点平动自由度,静强度工况分析如图2所示:
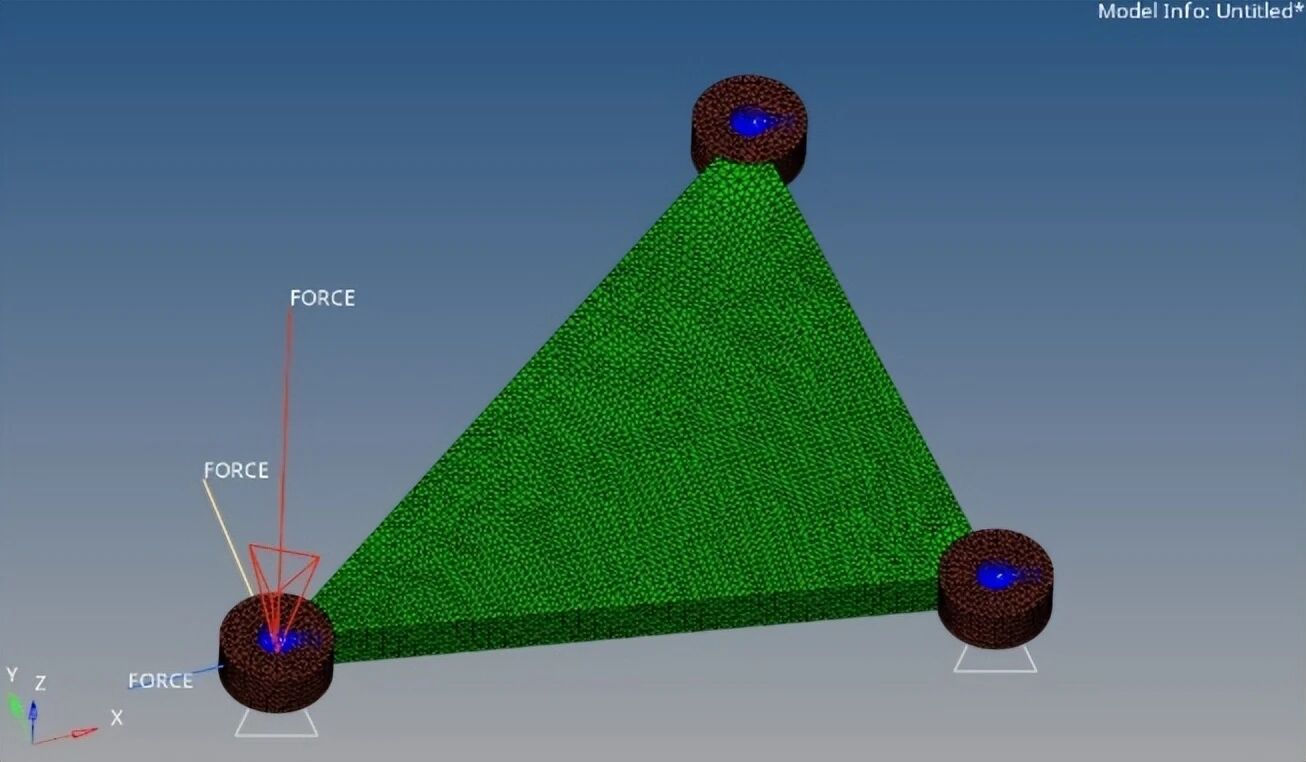
图2 摆臂拓扑优化静强度工况
- 分配权重:
· 与设计工程师共同确定各工况的权重。例如,如果车辆更注重舒适性,则垂向工况权重可设为0.5,制动和侧向各0.25。如图3所示:
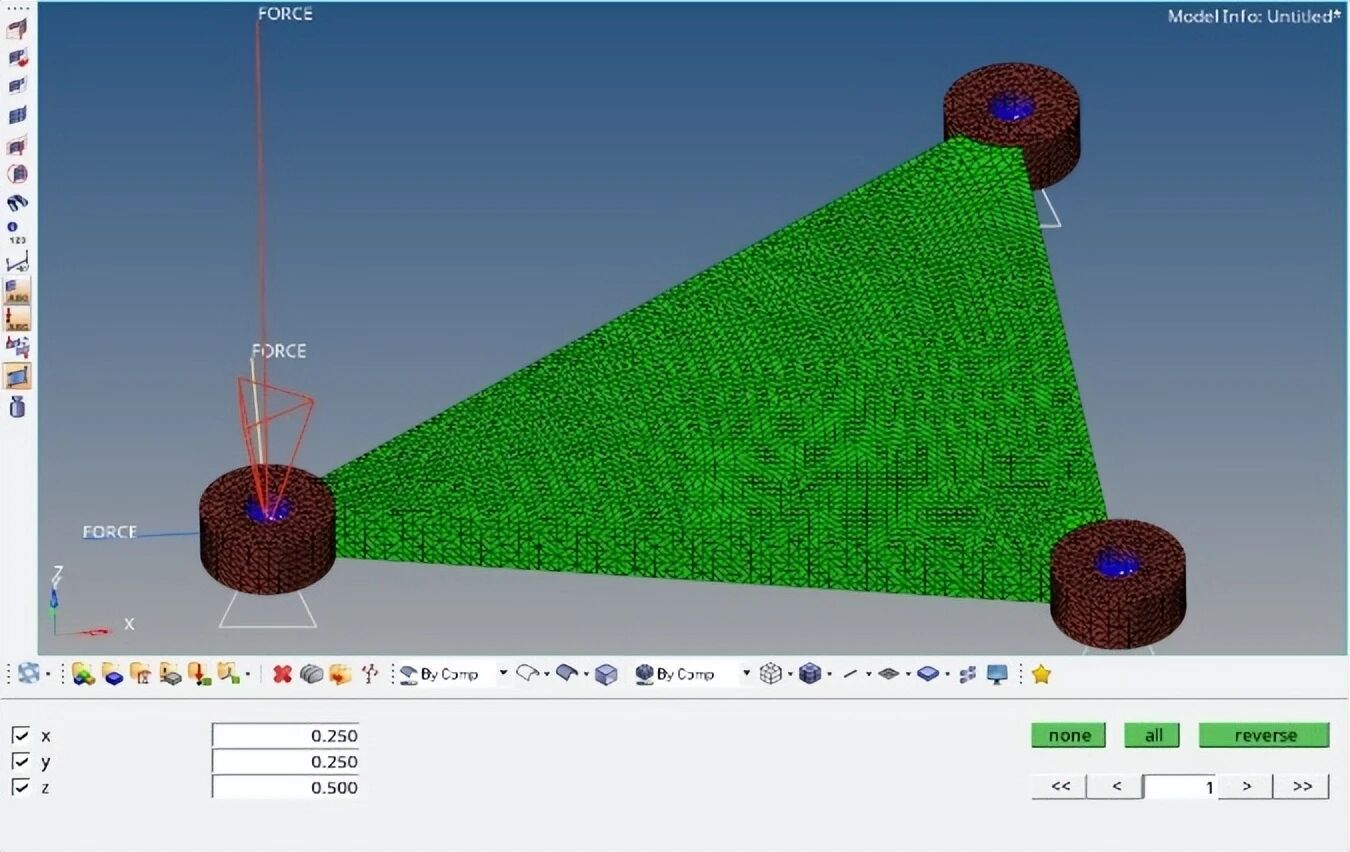
图3 加权柔度响应设置
- 设置优化参数:
· 目标体积分数:设置为0.3(即最终材料用量为设计空间的30%),设置如图4所示。

图4 体积分数约束设置
· 优化目标:以最小柔度作为优化目标,设置如图5所示。

图5 优化最小柔度设置
· 惩罚因子p:通常为3。
· 滤波:必须采用灵敏度滤波或密度滤波来抑制棋盘格现象并确保 mesh-independence。
- 求解迭代:
· 使用优化算法(如OC( Optimality Criteria)法或MMA(Method of Moving Asymptotes))进行迭代求解。迭代过程如图6所示:
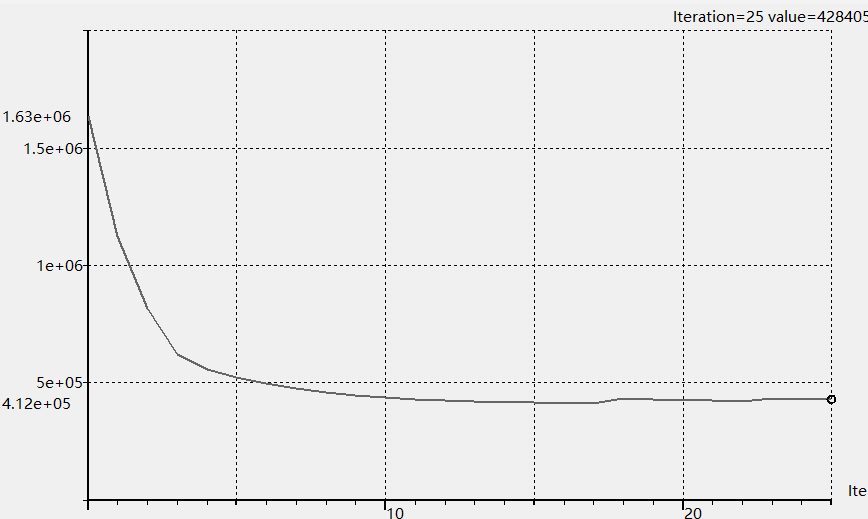
图6 优化目标迭代过程
· 流程为:有限元分析(FEA)求解各工况位移 → 计算各工况柔度和总目标函数 → 计算目标函数和约束的灵敏度 → 更新设计变量(单元密度)→ 收敛判断。
- 结果后处理与解读:
· 优化结果是一个密度在0-1之间分布的云图。最终优化结果单元密度云图如图7所示
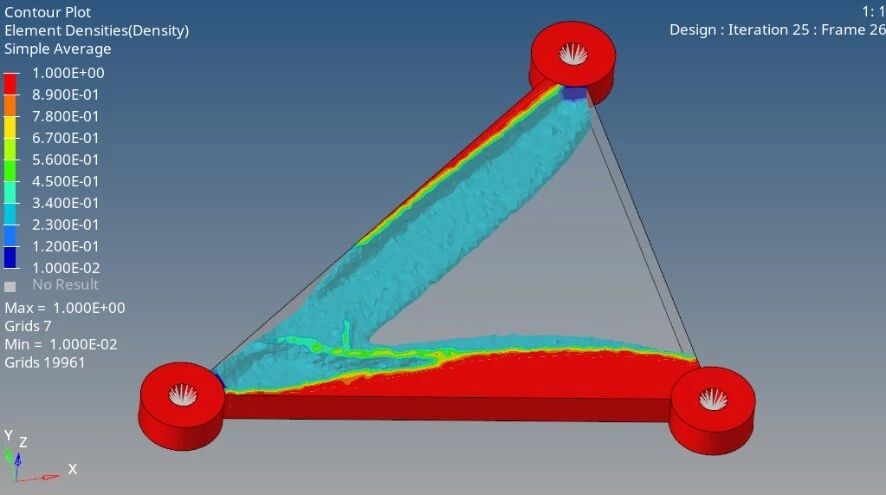
图7 优化结果单元密度云图
· 需要对其进行解读和重构,将连续的密度分布转化为清晰的工程概念模型。这通常需要工程师的经验,将材料富集区域解释为梁、板等结构。
· 注意:拓扑优化结果是一个初步概念设计,不能直接用于制造,必须进行详细的CAD重构和CAE验证。
三、挑战与注意事项
· 权重因子的敏感性:不同的权重分配会导致截然不同的拓扑结构,需要根据工程目标进行多次试算和调整。
· 模态频率约束:有时为了控制NVH(噪声、振动与平顺性)性能,需要在优化中加入频率约束(如一阶模态频率>某个值)。
· 应力约束:柔度优化不能直接控制应力,最优刚度设计可能存在应力集中。通常的流程是先进行柔度拓扑优化得到概念构型,再进行尺寸和形状优化来细化并校核应力。
· 工艺约束:需要考虑制造工艺,如压铸、锻造或钣金冲压。先进的拓扑优化软件可以添加拔模方向、对称性、最小尺寸等制造约束。
四、总结
基于多工况加权柔度响应的拓扑优化是汽车控制臂轻量化设计的强大工具。它通过一个系统的、数学驱动的过程,帮助工程师从无到有地发现既满足多种性能要求又极致轻量化的创新结构方案,是现代CAE驱动设计(CAE-Driven Design)的典范。
其核心思想是:通过加权求和将复杂的多目标问题转化为单目标问题,利用变密度法迭代寻找材料的最佳布局,最终得到一个综合性能最优的轻量化概念结构。