C# 基于OpenCv的视觉工作流-章59-九点标定
本章目标:
一、获取图像坐标;
二、获取机械手坐标;
三、标定;
四、验证标定;
五、引导应用;
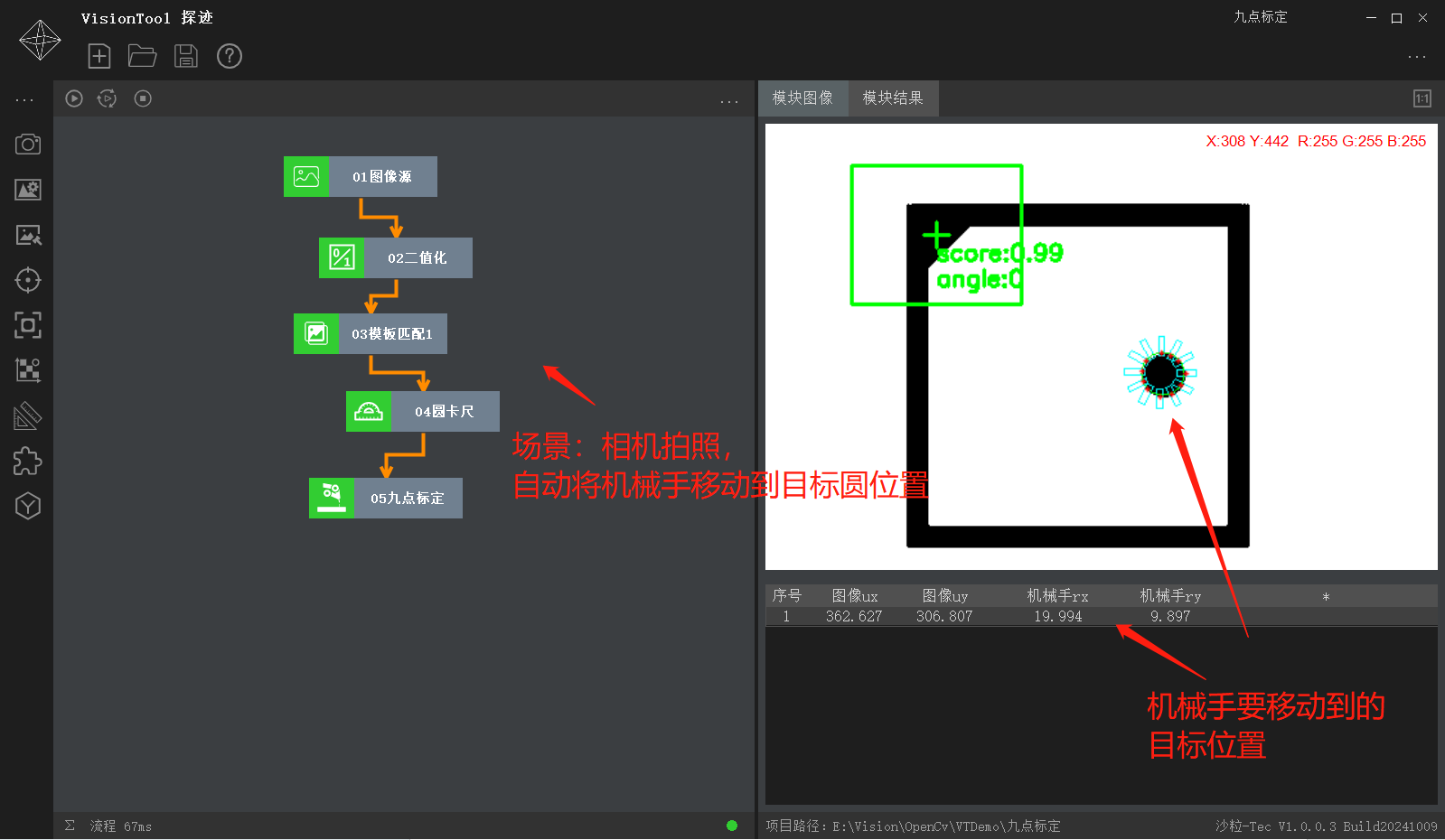
九点标定一般用于X、Y方向的机械手引导,通过移动机械手到9个点的位置,获取机械手坐标,再与图像坐标建立矩阵关系,也即求得图像坐标与机械手坐标的关系,最后通过视觉捕捉目标点,自动计算出机械手坐标,控制机械手移动到计算的位置,实现自动引导功能。
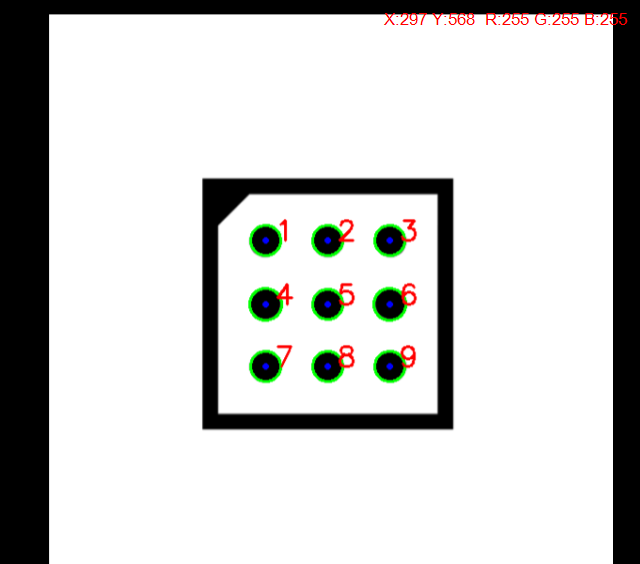
一、获取图像坐标
将标定板放在相机正下方,捕捉9个标定点的图像坐标,如下图所示。
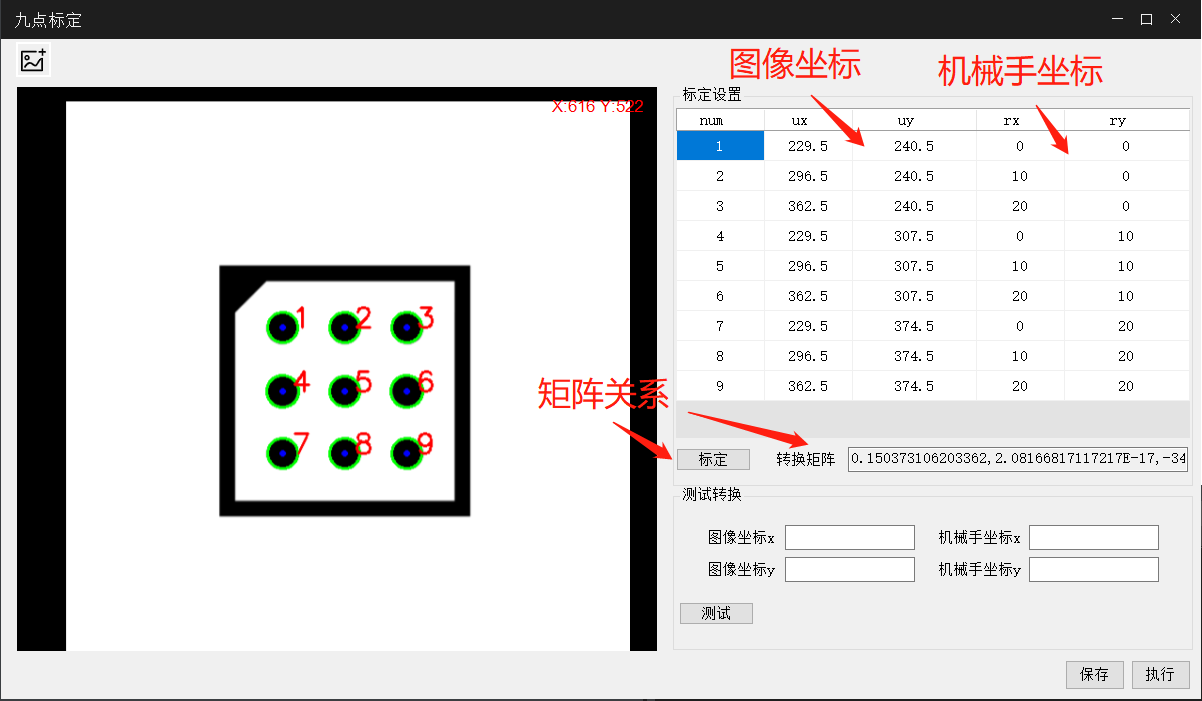
二、获取机械手坐标
移动机械手到各点位置,从机械手系统中获取记录各点坐标值。
三、标定
将机械手各点坐标信息录入,点击标定,建立矩阵关系。
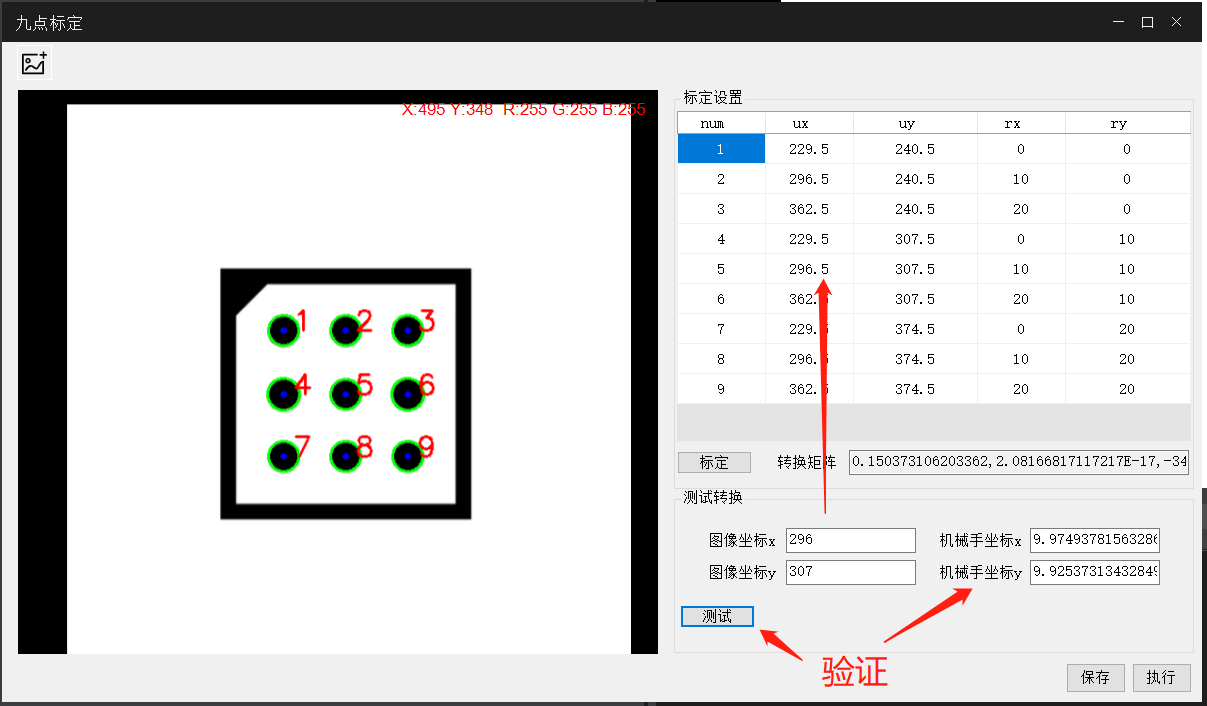
四、验证标定
输入图像坐标,测试输出的机械手坐标与实际是否一致。
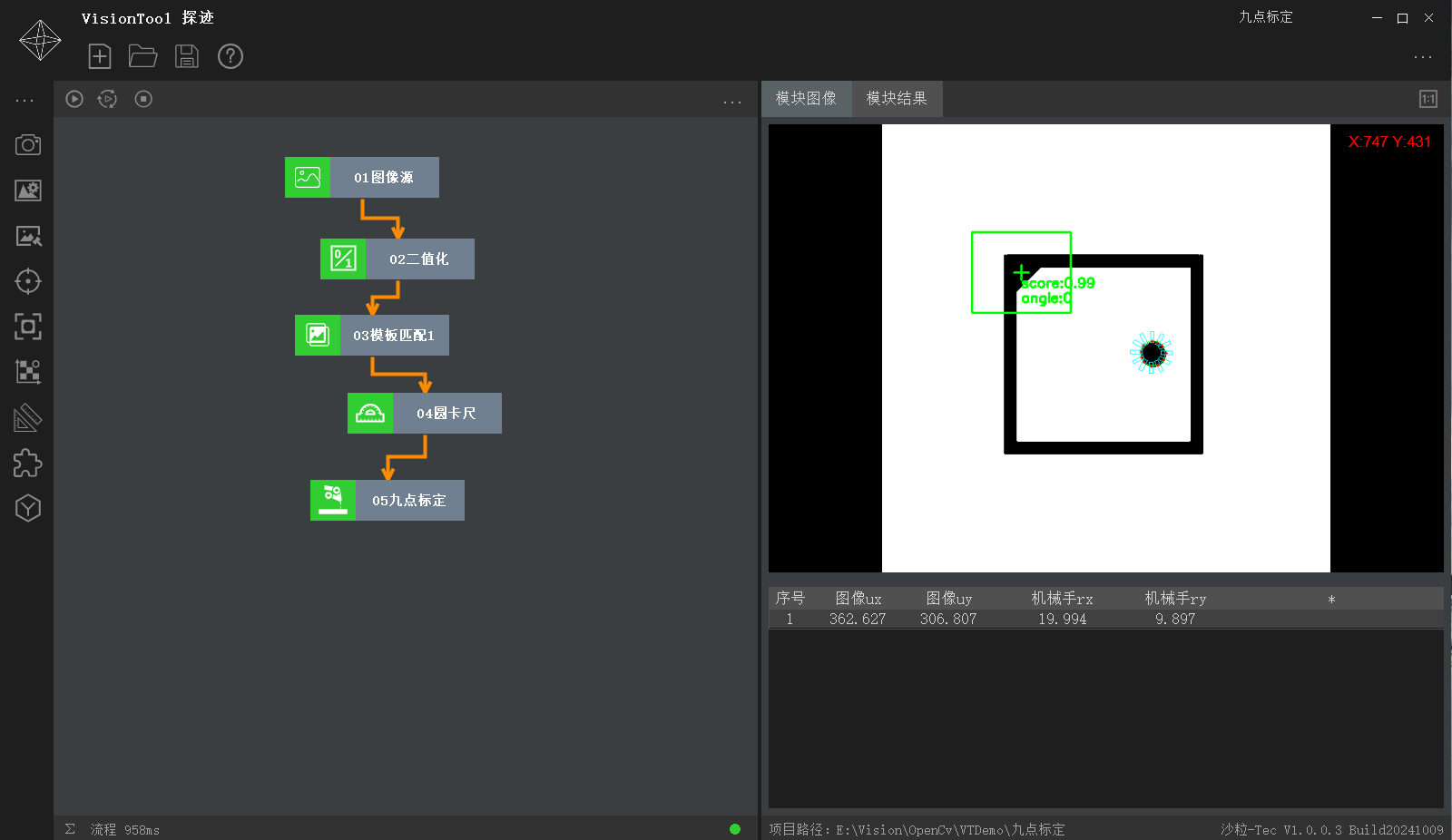
五、引导应用
传入实际图像,利用矩阵关系,自动计算机械手坐标
"VisionTool 探迹"免费视觉工具
下载地址:https://pan.baidu.com/s/11tktKOSnepLNIEqNbvnv6w?pwd=qv5i
"VisionTool Halcon"付费视觉工具 (淘宝可搜)
对应系列文章"C# 基于Halcon的视觉工作流",欢迎前往阅读。
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章,谢谢!