RotorFlight 2
通道设置

固件
尾电机模式,必须选择固件要M结尾的
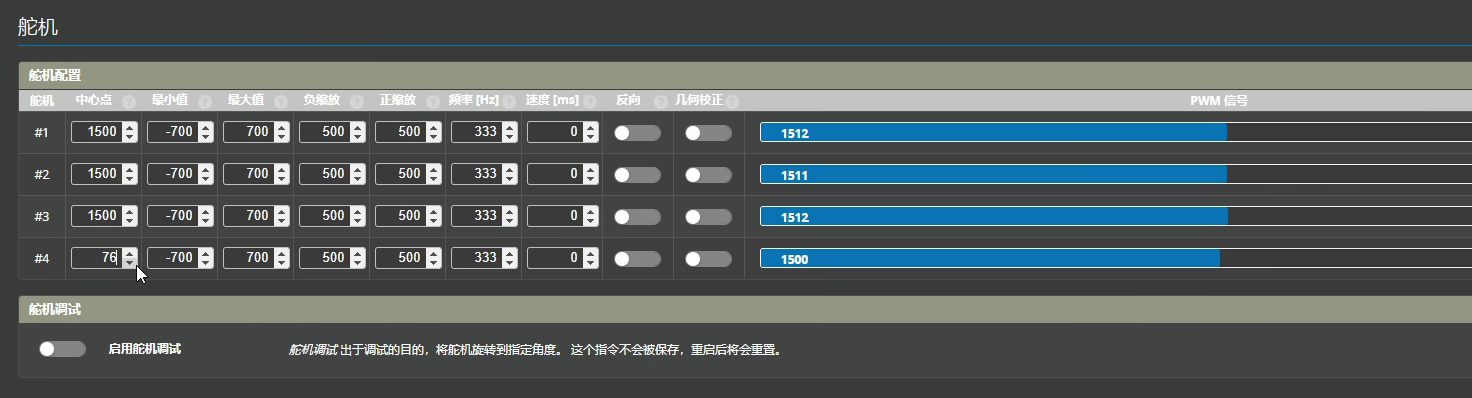
舵机设置
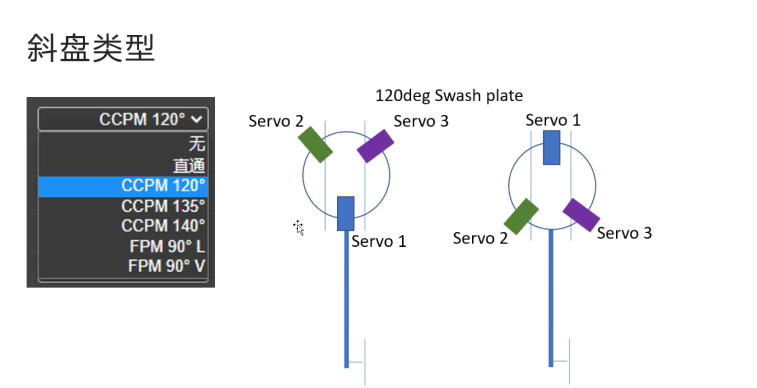
Servo 2总是在左侧
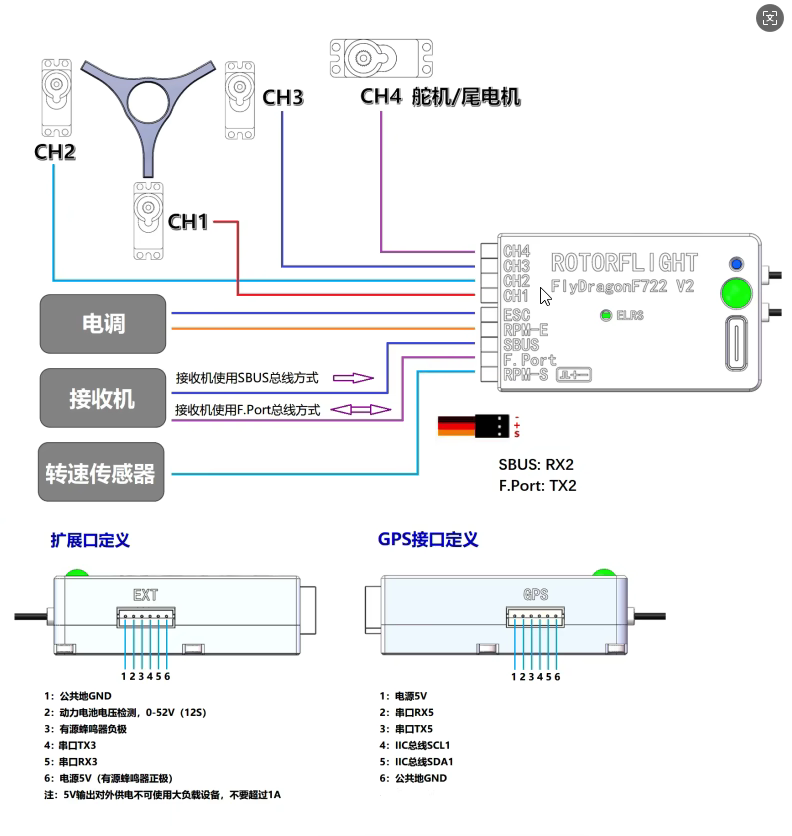
其中RPM-S为转速传感器
舵机分为宽频和窄频,宽频的中心点是1500,窄频的是760,一般为尾舵机是窄频
尾舵用窄频,就是为了更高刷新率、更快响应、锁尾更稳;斜盘要大力,所以用宽频。
一、窄频 vs 宽频(核心差异)
宽频(斜盘常用):中立点 1520μs,行程 ±700μs,刷新率约 333Hz;扭矩大、速度适中。
窄频(尾舵常用):中立点 760μs,行程 ±300μs,刷新率约 560Hz;速度极快、扭矩较小。
二、为什么尾舵必须快
直升机主旋翼旋转会产生强大反扭矩,尾巴必须毫秒级修正才能锁得住:
高刷新率 = 更跟手:窄频每秒发 560 次指令(宽频 333 次),修正更频繁、延迟更低。
抗 "金鱼尾":尾巴抖动(金鱼尾)多因响应慢、修正不及时;窄频能快速抑制高频抖动。
尾桨负载小:尾舵不需要斜盘那么大扭矩,速度优先于力量。
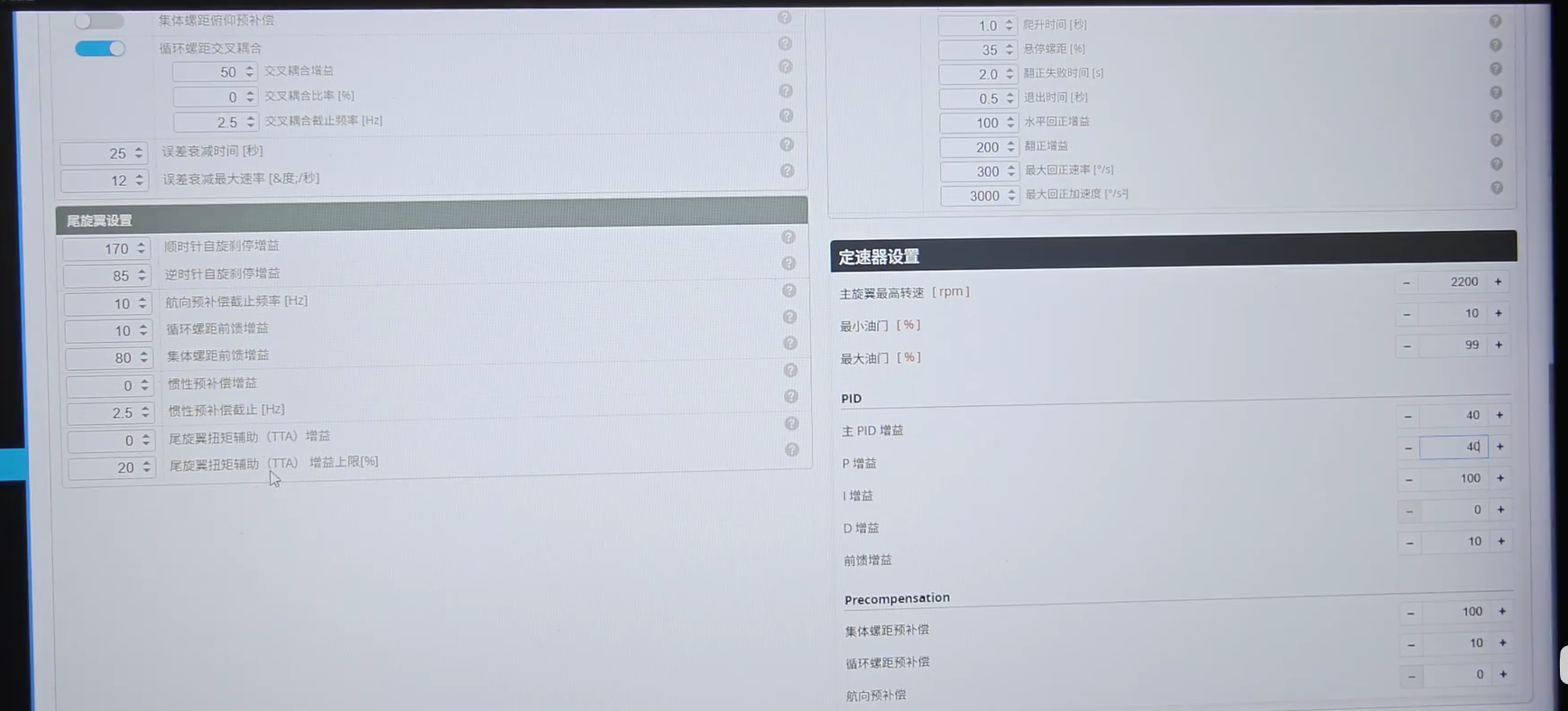
三、Rotorflight 里的设置要点
尾舵(通常 SERVO4)需设为窄频模式:
中立点:760μs
行程:450--1050μs(±300μs)
刷新率:560Hz(或更高)
斜盘保持宽频(1520μs、333Hz),保证足够扭矩推主旋翼
 # 速率
# 速率