前言
本示例在abaqus的optimization模块,对比平面对称、点对称、旋转对称、循环对称的效果,该模型与 Airbeam(气梁)示例模型完全相同。
备注:tosca中有关联对称约束,optimization模块里面没有。
-
无约束状态
-
平面对称约束
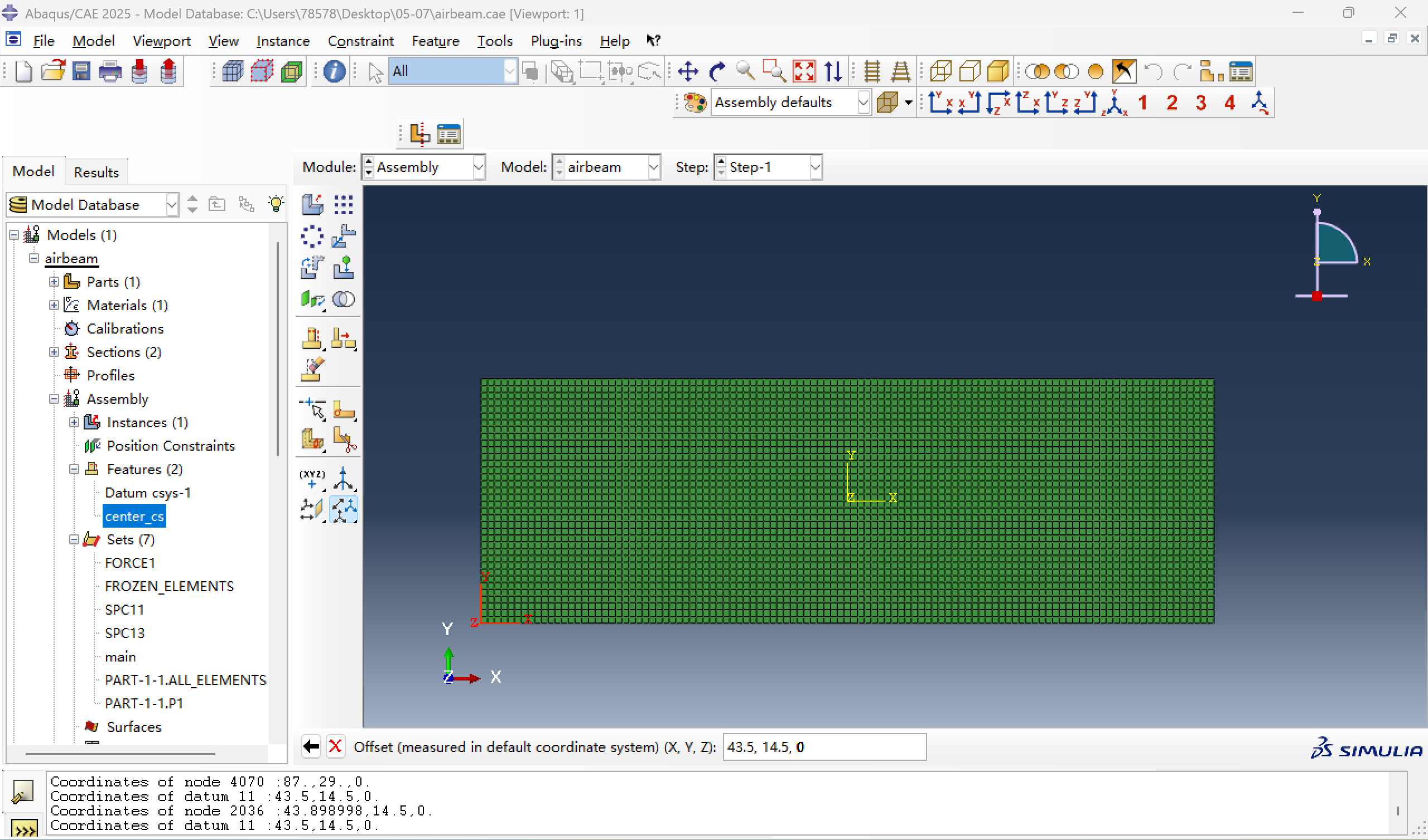
定义坐标系center_cs,以默认坐标系为参考,偏移43.5, 14.5, 0。
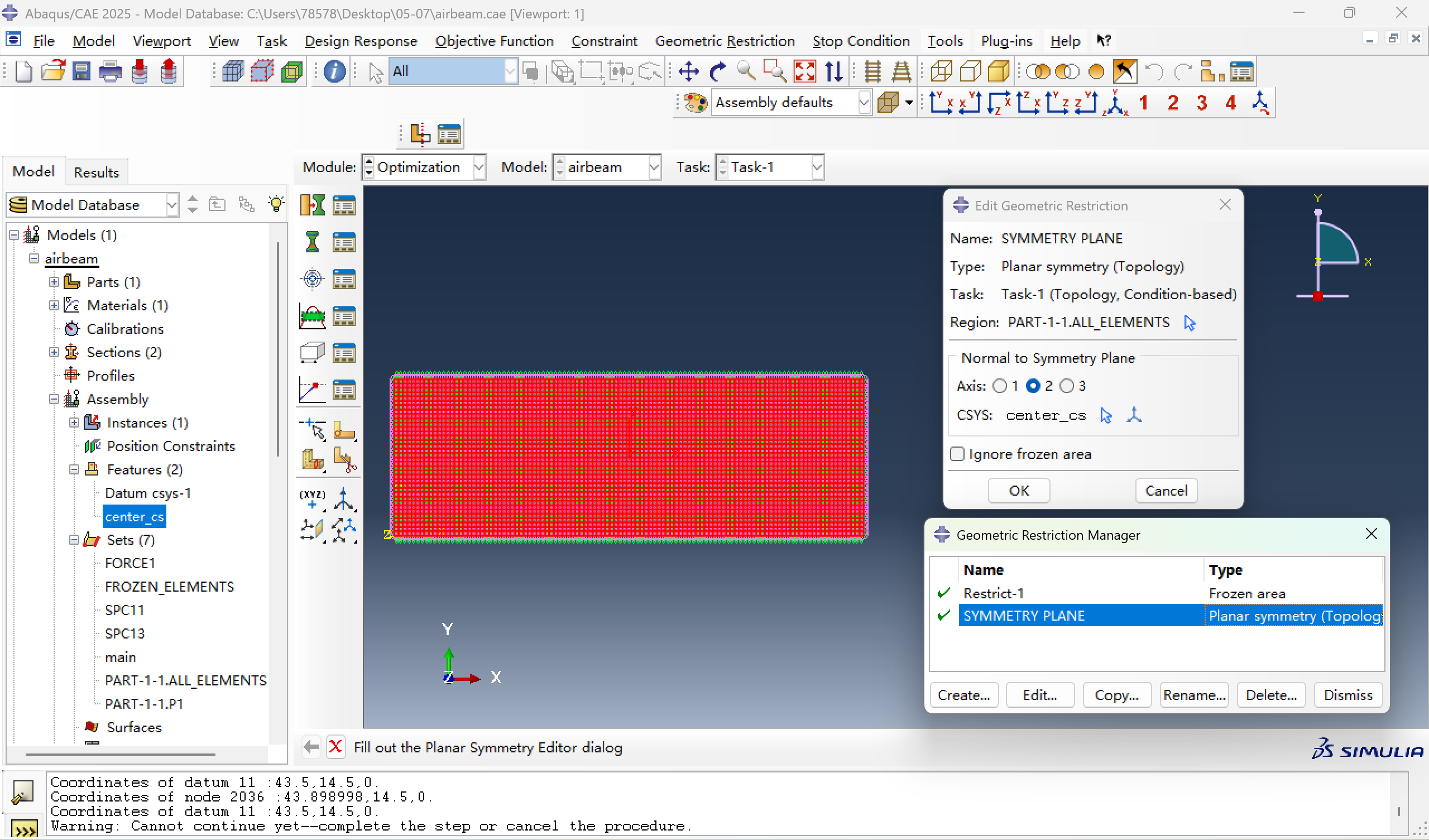
新建平面对称约束,选择坐标系为CENTER_CS,对称平面的法向为Y轴。
优化后的结果
-
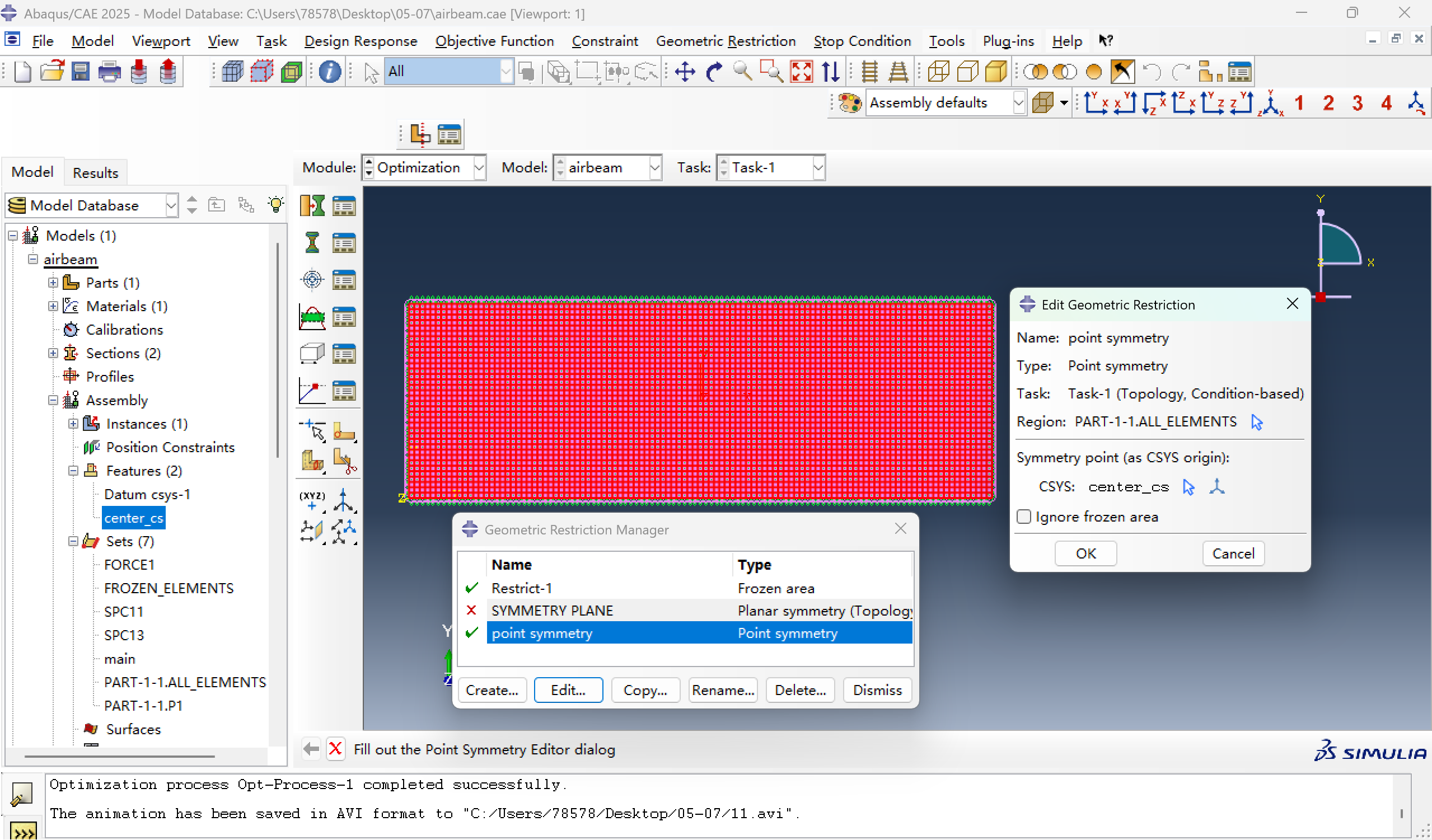
点对称约束
新建点对称约束,选择坐标系为CENTER_CS。
优化后的结果
-
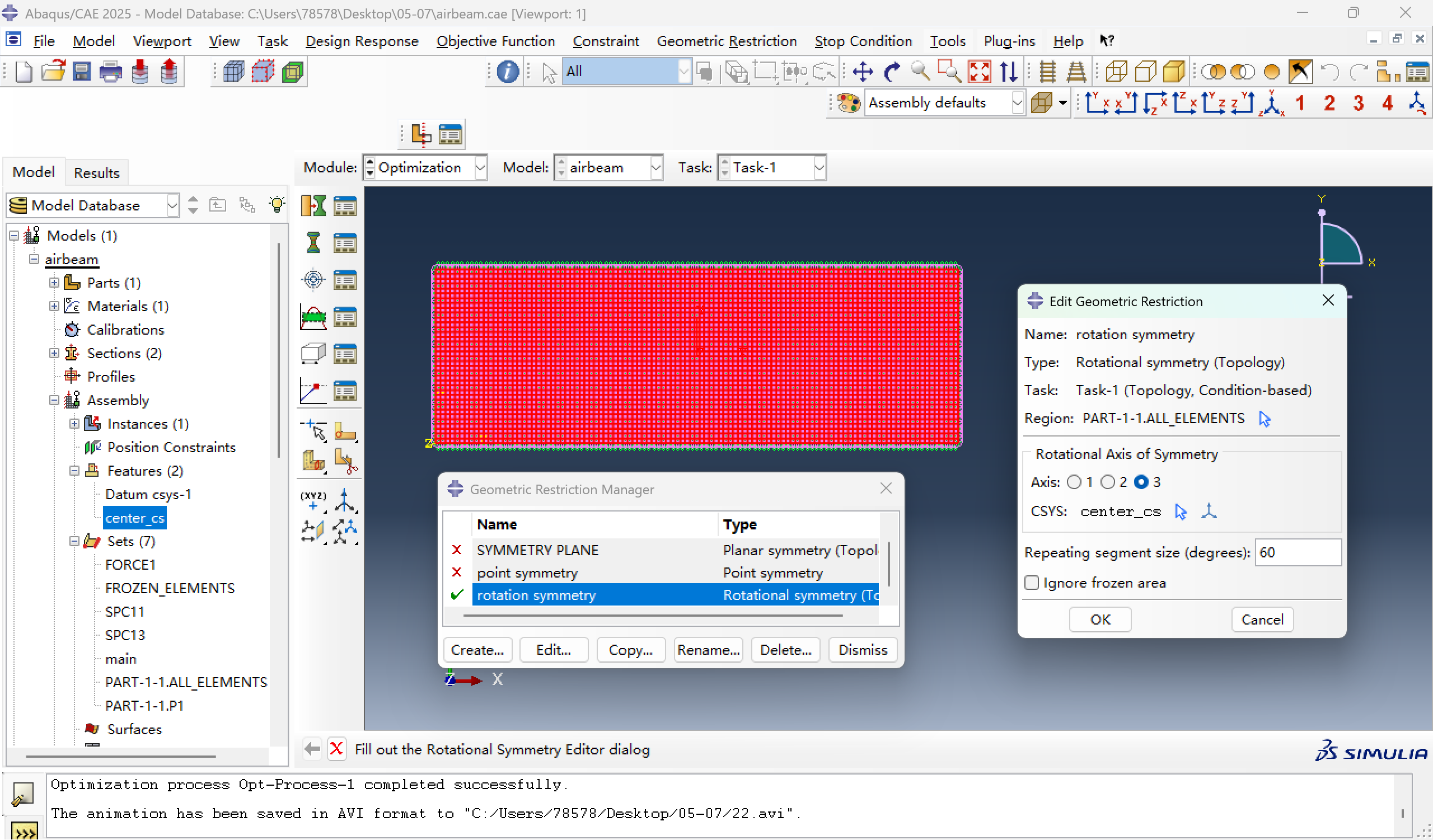
旋转对称约束
新建旋转对称约束,选择坐标系为CENTER_CS,旋转轴为Z轴,重复单元角度为60°。
优化后的结果
-
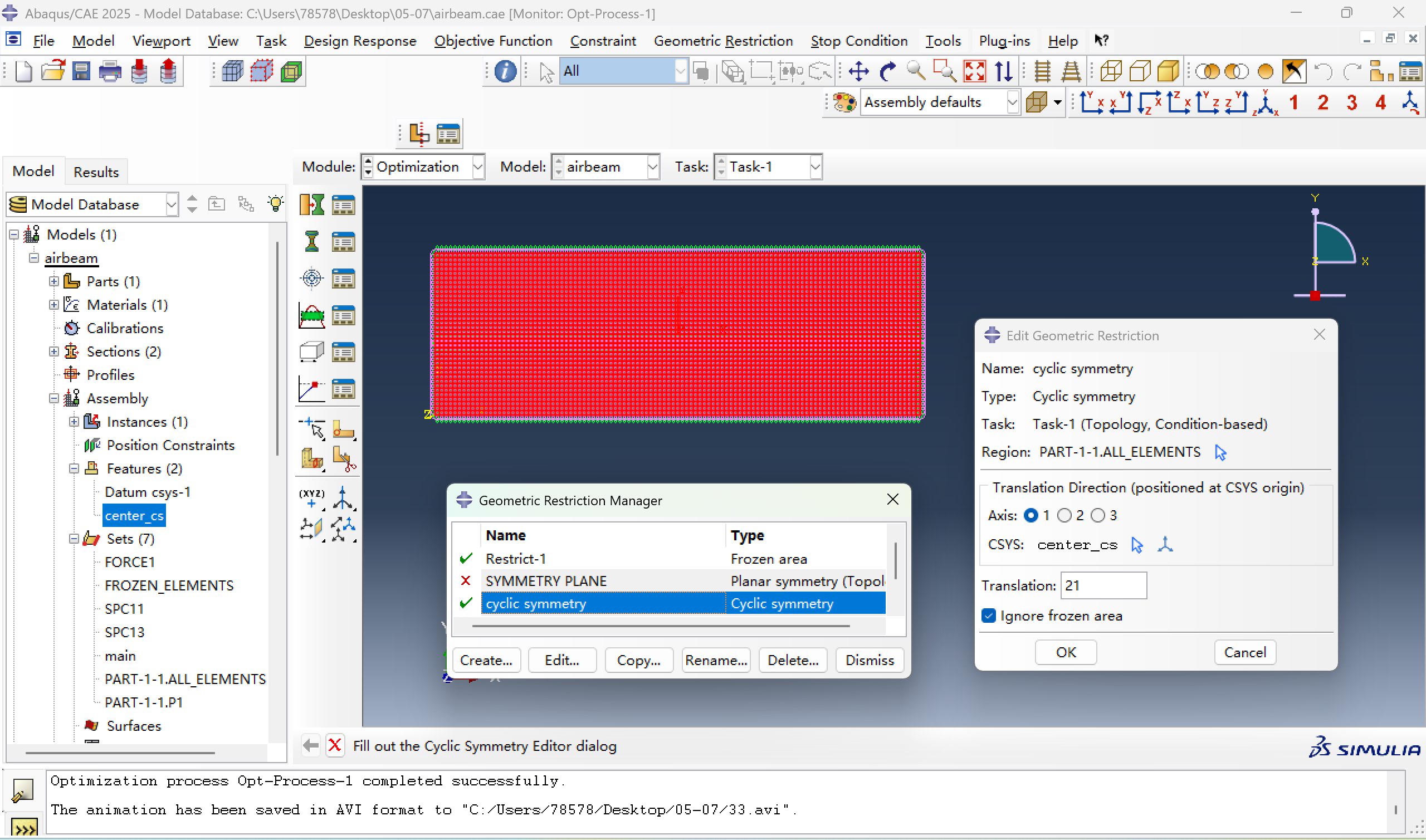
循环对称约束
新建循环对称约束,选择坐标系为CENTER_CS,方向为x轴,重复单元角度为21。
优化后的结果