导读
在现代飞机生产中,精度至关重要。每一个孔位、每一个固定点都必须精确定位,以保障安全性与产品质量。在由德国宇航中心(DLR)牵头开展的 DiCADeMA 项目(数字化机舱架构与制造设计)中,研发出了一套全新的全数字化网络化工艺流程。借助智能自动化技术,该方案将飞机机舱制造提升至全新高度。此流程中的核心部件之一,是来自友思特合作伙伴 IDS 成像系统有限公司的 Ensenso 3D 相机,它可实现钻孔位置的高精度检测与定位校准。
数字化贯穿全程: 从设计到生产的无缝衔接
本项目旨在构建一条从设计到生产的连续数字主线。机舱设计的变更(如座椅间距调整及行李舱相应位置更新)将直接记录在数字化设计数据中,并自动同步至生产规划环节。在制造任何物理部件前,可通过仿真对这些设计方案进行验证。数字化验证完成后,即可立即启动生产。
为将这一数字化流程落地,研究团队在飞机机身框架样机上开发了一套钻孔位置自动标记系统。该系统由多个网络化设备协同工作:自主移动机器人(AMR)行驶至机身框架附近,并在目标区域完成自主定位。AMR 上搭载一台轻型机械臂,可将含 3D 相机在内的标记装置移动至采集位。此时,友思特Ensenso 相机负责执行精确定位校准。整套子流程由集成制造执行系统(MES)统一管控。
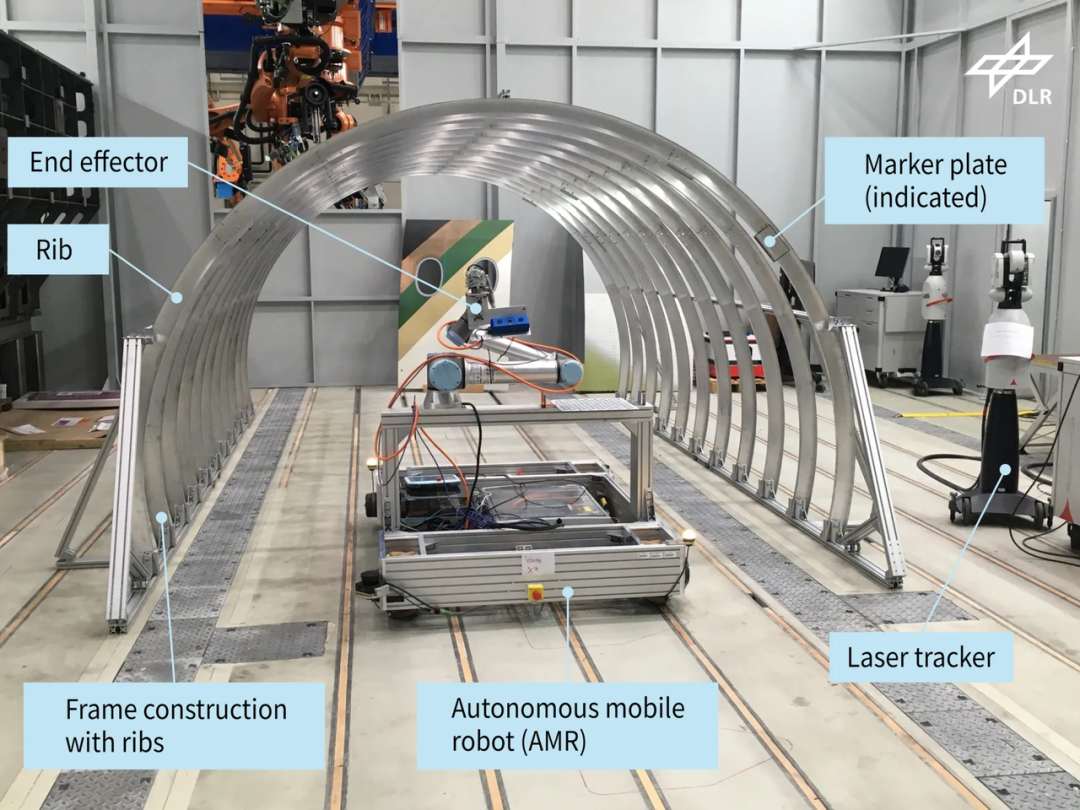
机身框架与搭载上层设备的移动机器人
02 核心担当: Ensenso 3D相机的精准定位逻辑
项目所采用的 友思特合作伙伴 iDS Ensenso N36 相机 可将环境采集为三维点云,并与飞机机身框架的 CAD 数据进行匹配。通过这种方式,即使是设计模型与实际几何结构之间极其微小的偏差也能被检测出来。系统利用这些数据计算出精确的修正值,并上传至上层制造执行系统(MES)。设备间通过标准化的 OPC UA 接口进行通信,确保相机、机器人与控制系统之间可靠、安全地交换数据。制造执行系统将采集到的数据转化为针对机器人的具体控制指令,由机器人完成钻孔位置的标记作业。
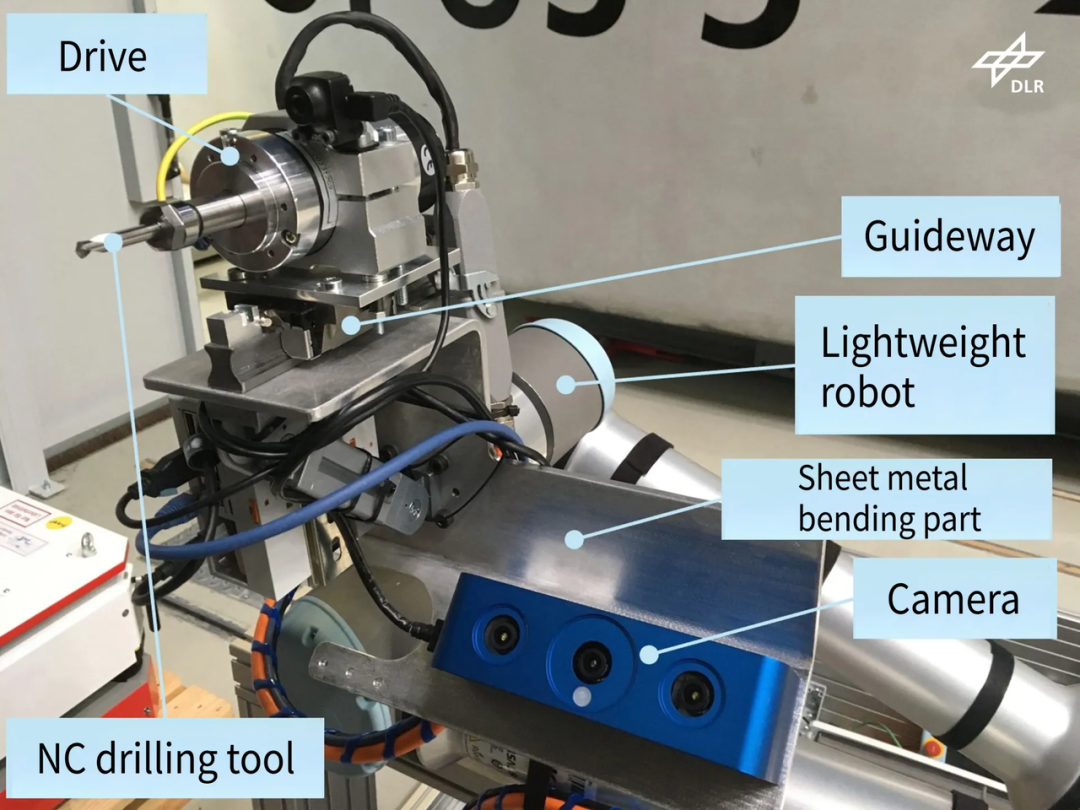
搭载标记装置与 3D 相机的轻型机械臂
自主机器人可实现约5mm的定位精度,使相机能够安全抵达采集位置,无碰撞风险。
友思特合作伙伴 iDS Ensenso 相机 成为连接数字化设计与实际生产的关键环节:它可识别局部几何特征,本例中为多颗铆钉及其安装表面,并将采集到的点云与 CAD 参考数据进行比对。这一比对过程得益于手眼标定与迭代优化算法等技术。最终生成的变换矩阵可精确描述钻孔位置所需的修正量,通过应用该修正值,即可精准确定钻孔位置。
操作人员跟随机器人移动,并在标记位置立即完成钻孔作业。每个安装点位均重复此流程,机器人与人可在近距离内安全协同作业。
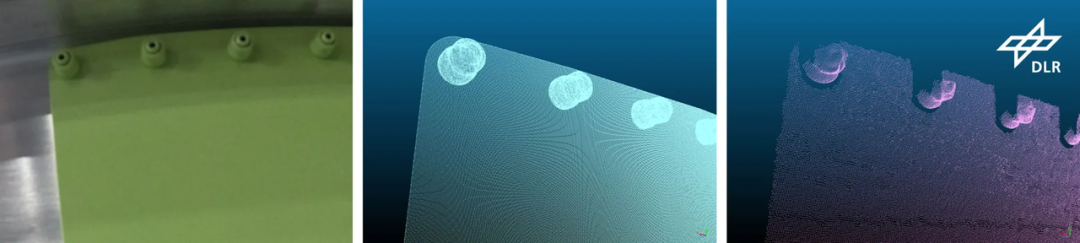
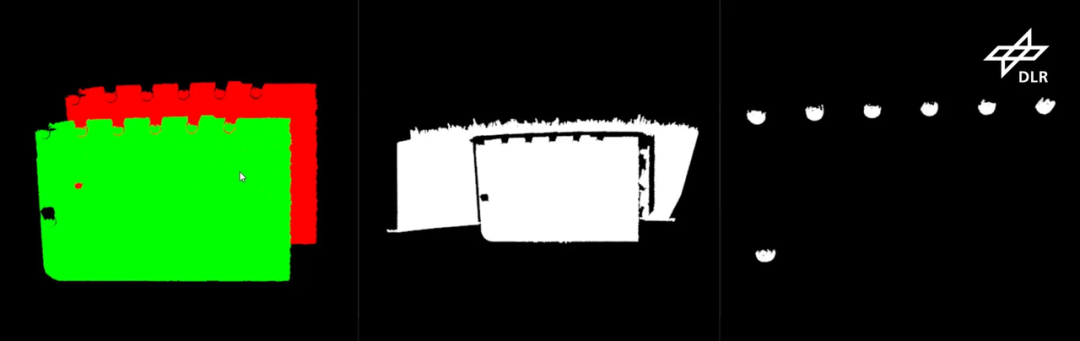
带铆钉板材的不同视角对比:实际板材(左)、CAD 点云(中)、3D 相机点云(右)
03 航空场景: Ensenso N36相机的专属优势
针对飞机制造中的该应用,需要一台工作距离极短的紧凑型相机,以尽可能缩短从采集位置到钻孔位置的移动路径。这有助于保持高精度,并避免机器人进行过多运动。Ensenso N36 完全满足这些要求。
友思特合作伙伴 iDS Ensenso N 系列 专为严苛工况环境应用而开发。凭借紧凑的结构设计,该相机可节省空间地安装,既可固定安装,也可搭载在机械臂上。因此,它同样适用于移动物体与静止物体的三维图像采集。
其内置投射器即使在复杂光照条件下也能确保高对比度纹理:通过带有随机点阵的图案掩模,向物体表面投射额外纹理,从而补充缺失或特征不明显的区域。所有相机均在出厂前完成预标定,可快速便捷地投入使用。
04 价值凸显: 数字化流程为航空制造赋能
这套数字化流程为德国宇航中心(DLR)带来了诸多优势。基于相机的对位校准显著提升了精度与重复性。同时,连续的数据采集可实现所有工序的完整记录与可追溯性。装配人员的工作负担得以减轻,因为机器人承担了耗时的定位工作,技术人员可专注于实际装配作业。此外,由于不再需要手动测量或重新调整,生产时间大幅缩短。
点云理论值与实际值对比
05 未来展望: 从航空到多行业的精准延伸
在样机上的演示充分展现了数字化流程链、机器人技术与 3D 图像处理相结合的巨大潜力。在后续项目阶段,将更细致地研究系统精度与评估算法性能,不仅涉及相机本身,还包括优化用于理论点云与实际点云配准的数学方法。
目前在飞机制造中测试的这套系统,未来也可应用于其他行业。它有力地证明了光学传感技术与智能软件正为制造业开启全新时代:网络化、高效化、精准化。

Ensenso 3D相机 N系列
友思特Ensenso N系列 3D视觉相机,具备紧凑坚固设计,适配恶劣环境。提供铝制与纤维增强塑料两种外壳,满足不同场景需求。基于立体视觉原理,集成大功率投影仪,拥有 IP65/67 防护等级,配备可锁紧 GPIO 连接器。专为移动与静止物体检测设计,节省安装空间,助力机器人高效完成高精度 3D 检测任务。