AiBrainLink:无人化系统异构连接架构-多执行体、多链路(5G+自组网)、多业务流(控制、遥测、视频、文件)透明传输、多对多控制
AiBrainLink Unified Communication Fabric for Autonomous Systems
Seamless Dual-Link Connectivity, Protocol Transparency and Edge-to-Control Orchestration
跨载体统一接入能力(UAV / UGV / USV / 机器狗 / 吊舱)+ 通信容灾 + 控制抽象层。
边缘通信Agent + Ground Hub + Message Bus
异构无人系统 heterogeneous connectivity
解决的问题:
多执行体、多链路(5G+自组网)、多业务流(控制、遥测、视频、文件)透明传输、多对多控制
-
多执行体:目标在一个系统架构下,统一各类厂家的UAV、UGV、机器狗。
-
多C2链路:目标支持蜂窝5G、自组网、低轨卫星(未来),支持链路的捆绑以及根据业务的不同链路的优先策略
-
多业务流:目标实现执行体控制、执行体遥测、吊舱的控制、吊舱遥测、视频流、文件等几类业务流的尽可能透明传输。
-
多对多控制:基于授权认证以及优先级控制的多对多控制
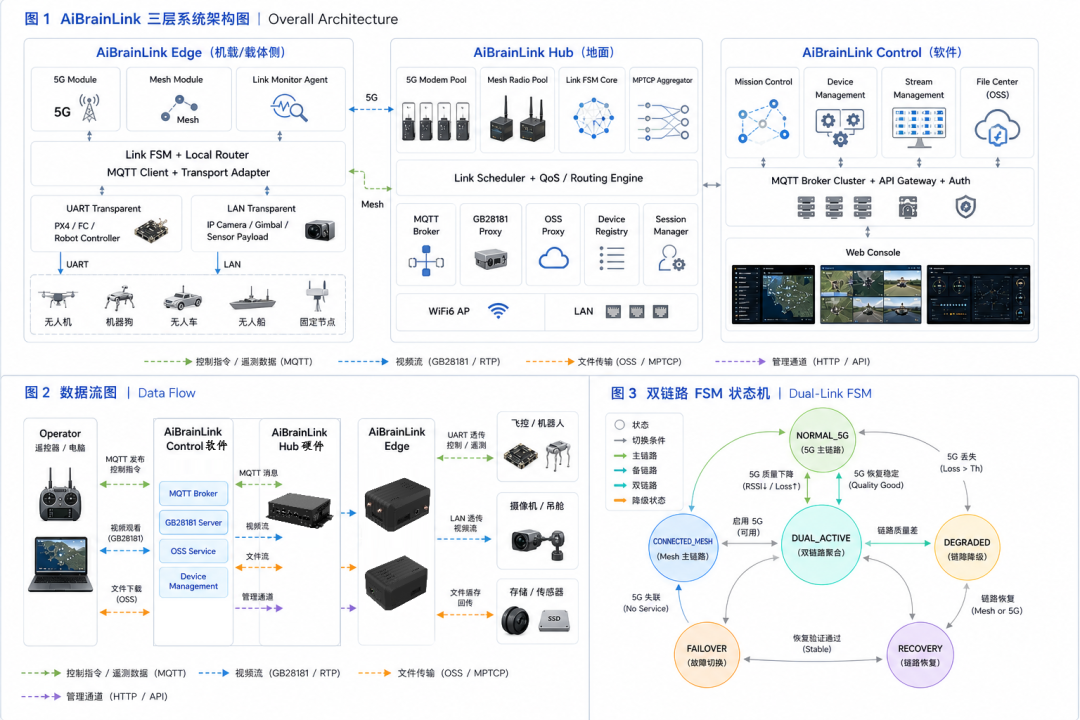
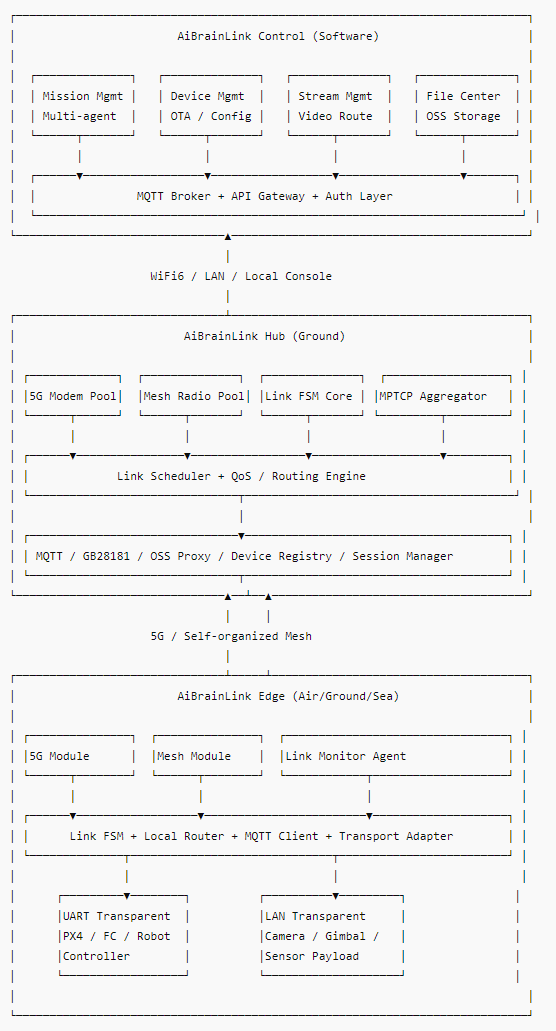
AiBrainLink 三层系统架构图 + 数据流定义
端(Edge)--- 边(Hub)--- 控(Control)

AiBrainLink组成
-
AiBrainLink Edge(机载/机器狗/UGV)
-
AiBrainLink Hub(地面)
-
AiBrainLink Control(软件)
AiBrainLink System Architecture
一、三层职责划分
1. AiBrainLink Edge(机载 / 载体侧)
这是:通信接入与协议桥接层

部署对象:
-
UAV
-
UGV
-
USV
-
机器狗
核心模块
(1)Dual Link Access-5G+MESH(未来低轨卫星)
双链路:
- Primary-5G
适合:
-
城市
-
广域
-
高吞吐
Secondary-Mesh
适合:
-
GNSS拒止
-
无公网
-
编队协同
(2)Link FSM
负责:
状态监测
-
RSSI
-
RTT
-
Packet Loss
-
Throughput
决策
状态:
CONNECTED_5G
CONNECTED_MESH
DUAL_ACTIVE
DEGRADED
FAILOVER
RECOVERY(3)Transport Adapter
负责:
UART透传
连接:
-
飞控(MAVLINK)
-
机器人控制器
-
云台控制器
LAN透传
连接:
-
IP Camera
-
Sensor Node
支持客户二次开发
(4)MQTT Client
Topic订阅&发布
支持客户二次开发
(5)视频网关
RTSP取流
GB28181推流
(6)MPTCP Client
2. AiBrainLink Hub(地面)

(L*W*H):172*116*54mm(含桌面式安装件);144.8*125.22*50(含导轨安装件);
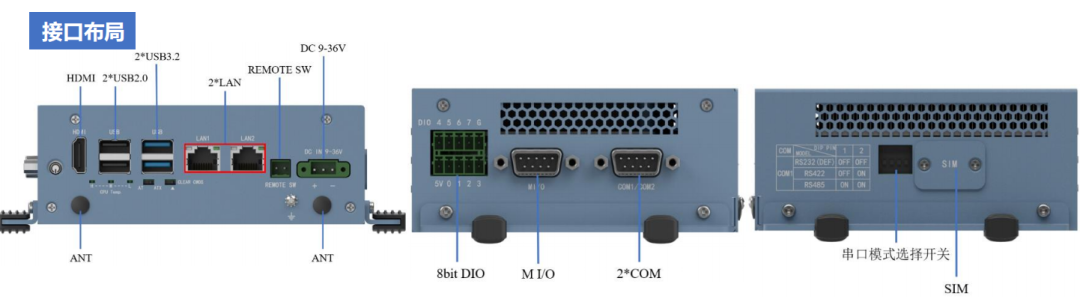
链路调度与边缘交换中心
Ground Communication Fabric
通讯配置:
-
5G
-
WIFI6 AP
-
自组网
-
LAN
-
USB
-
UART
-
CAN(可选)
模块
(1)Link Scheduler
根据链路质量决定:
控制流-主备切换
视频流-链路优选
文件流-MPTCP聚合
(2)Session Manager
维护AiBrainLink Edge 设备会话
包括:
-
注册
-
认证
-
心跳
-
Keepalive
(3)Protocol Server
-
MQTT:控制 / 数据
GB28181:视频
OSS:文件
3. AiBrainLink Control(软件)
任务控制与可视化平台(Browser-based)
模块:
Mission Control
任务:
-
起飞
-
路径
-
编队
-
巡检
Device Control
设备:
-
OTA
-
配置
-
重启
-
日志
Stream Control
视频:
-
多窗口
-
转发
-
录制
Digital Twin
非常重要。
显示:
-
地图
-
设备
-
链路状态
-
Topic状态
二、数据流
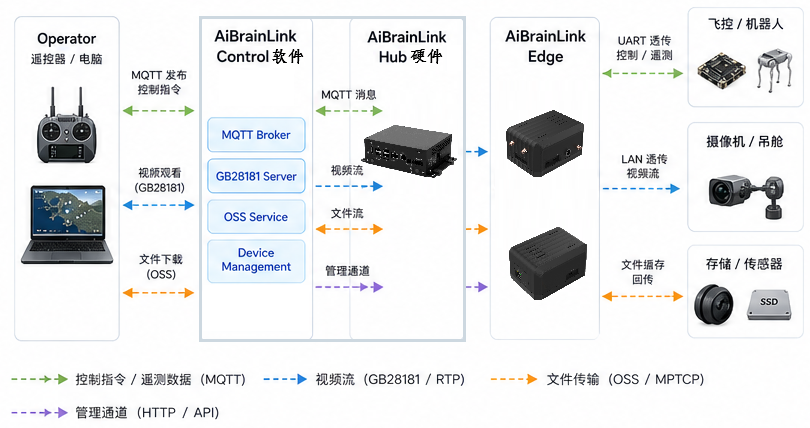
Flow 1:控制指令下发
遥控器 / PC 控制飞行器
Operator
↓
AiBrainLink Control
↓ MQTT Publish
AiBrainLink Hub
↓ Route Decision
5G / Mesh
↓
AiBrainLink Edge
↓ UART透传
Flight ControllerMQTT消息:
{
"topic": "/uav01/cmd",
"payload": "TAKEOFF"
}优势:
不关心飞控协议。
Edge只负责 transport
Flow 2:遥测上行
Flight Controller
↓ UART
Edge
↓ MQTT Publish
Hub
↓ Broker
Control Dashboard数据:
-
GPS
-
IMU
-
Battery
-
Mode
Flow 3:视频流
Camera
↓ RTP/RTSP
Edge
↓
5G / Mesh
↓
Hub GB28181 Proxy
↓
Control Viewer(WEBRTC)Flow 4:文件回传
Payload
↓
Edge Cache
↓
MPTCP
↓
Hub
↓
OSS包括:
-
图片
-
点云
-
日志
-
AI结果
Flow 5:OTA
Control
↓
Hub
↓
Chunk Transfer
↓
Edge
↓
Apply / Rollback三、链路切换机制
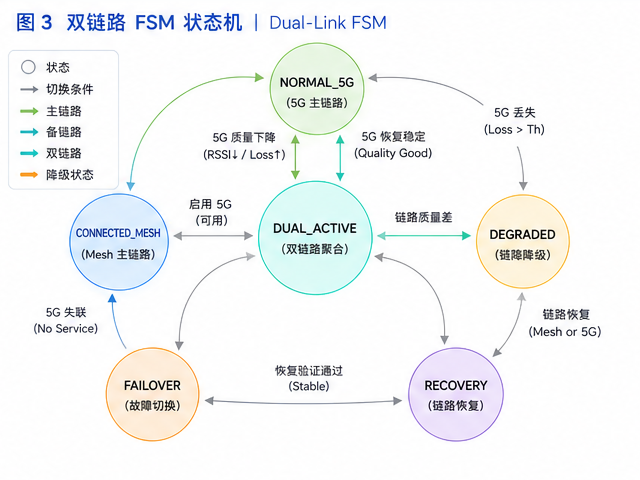
切换原则:
控制-无缝切
视频-快速重路由
文件-断点续传