Fractional timing estimate based on a sounding sequence
先看spec里的内容,如下:
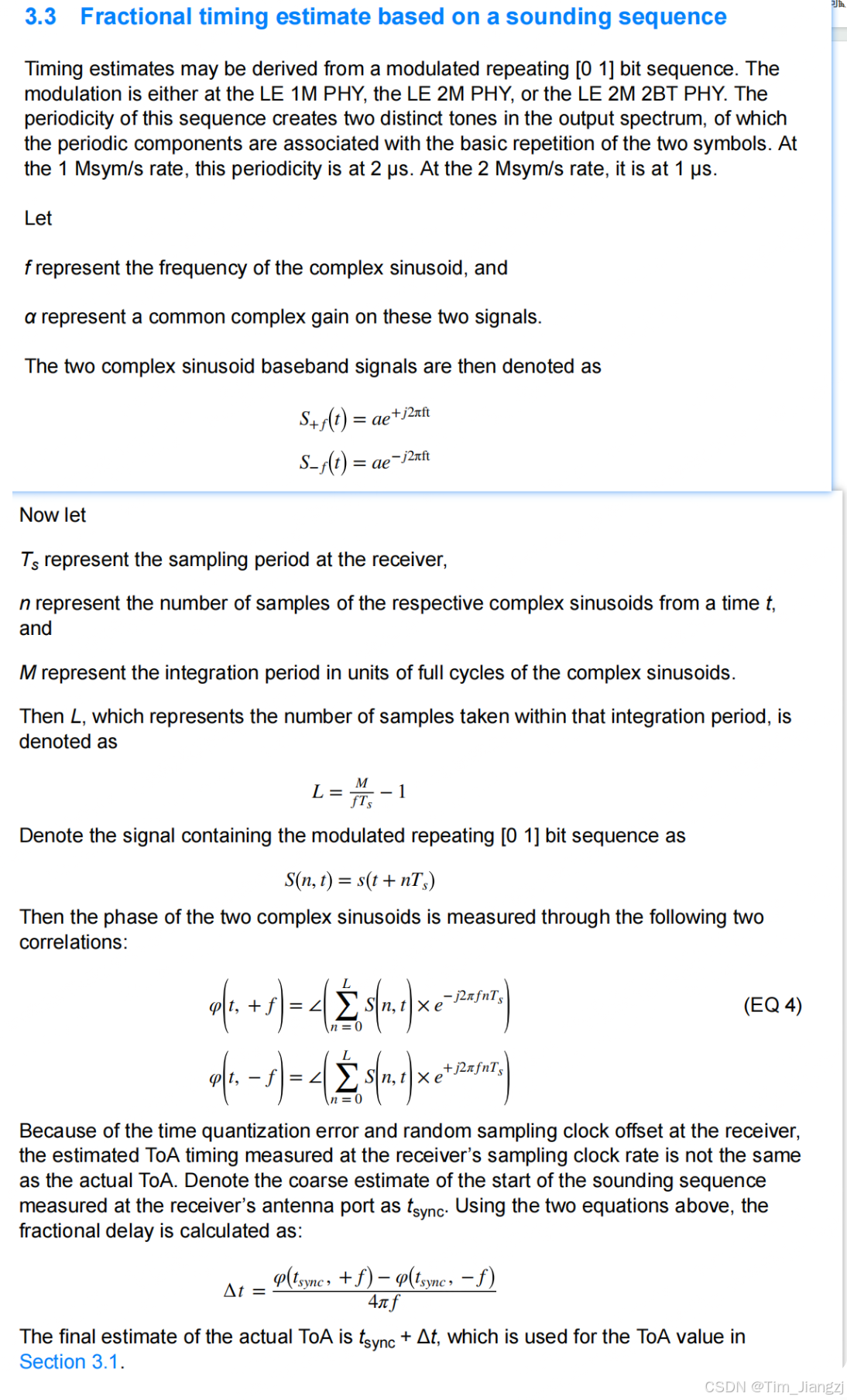
本节定义了一种基于周期性探询序列(Sounding Sequence)的高精度分数时延估计方法 ,用于解决采样时钟量化误差导致的粗同步(t_sync)精度不足问题。下面我将从信号模型 → 核心公式 → 推导过程 → 物理意义逐层拆解。
一、基础场景与信号模型
1. 周期性序列的频谱特性
蓝牙CS_SYNC使用重复的 [0,1] 序列(如 1010...),其频谱会产生两个明显的单音分量:
- 当符号率为
1 Msym/s时,序列周期为2 µs,对应频率f = 1/2µs = 500 kHz - 当符号率为
2 Msym/s时,序列周期为1 µs,对应频率f = 1/1µs = 1 MHz
这两个复正弦信号可以表示为:
S+f(t)=aej2πft,S−f(t)=ae−j2πft S_{+f}(t) = a e^{j2\pi f t}, \quad S_{-f}(t) = a e^{-j2\pi f t} S+f(t)=aej2πft,S−f(t)=ae−j2πft
a:复增益(包含幅度和相位)f:序列产生的单音频率+f/-f:对应正负频率分量,构成一对复共轭信号
2. 离散采样信号定义
设接收端采样周期为 T_s,则采样信号可表示为:
S(n,t)=s(t+nTs) S(n,t) = s(t + nT_s) S(n,t)=s(t+nTs)
n:采样序号t:粗同步时间点t_sync,即接收端初步估计的序列起始时间
二、积分周期与采样点数定义
标准定义了积分周期 M(单位为单音信号的完整周期数),对应的采样点数 L 为:
L=MfTs−1 L = \frac{M}{f T_s} - 1 L=fTsM−1
M:积分包含的正弦波周期数(决定估计精度)f:单音频率T_s:采样周期L:积分窗口内的总采样点数减1,确保积分覆盖整数个信号周期
三、核心公式1:复相关相位估计(EQ 4)
1. 公式定义
φ(t,+f)=∠(∑n=0LS(n,t)×e−j2πfnTs) \varphi(t, +f) = \angle\left( \sum_{n=0}^{L} S(n,t) \times e^{-j2\pi f n T_s} \right) φ(t,+f)=∠(n=0∑LS(n,t)×e−j2πfnTs)
φ(t,−f)=∠(∑n=0LS(n,t)×e+j2πfnTs) \varphi(t, -f) = \angle\left( \sum_{n=0}^{L} S(n,t) \times e^{+j2\pi f n T_s} \right) φ(t,−f)=∠(n=0∑LS(n,t)×e+j2πfnTs)
2. 变量含义
| 变量 | 含义 |
|---|---|
| φ(t,±f)\varphi(t, \pm f)φ(t,±f) | 对应正负频率分量的相关结果相位 |
| S(n,t)S(n,t)S(n,t) | 接收端采样信号 |
| e∓j2πfnTse^{\mp j2\pi f n T_s}e∓j2πfnTs | 本地复正弦参考信号,与接收信号做相关运算 |
| ∠(⋅)\angle(\cdot)∠(⋅) | 取复数相位角 |
3. 物理含义
这两个公式是离散复相关运算:
- 接收信号
S(n,t)与本地正负频率参考信号做滑动相关 - 相关结果的相位,反映了接收信号与本地参考信号的相位差
- 这个相位差,直接对应信号的分数时延
四、核心公式2:分数时延估计推导
1. 时延与相位的关系
信号时延 Δt 会导致单音信号产生相位旋转:
- 对于
+f分量:相位差为2πfΔt - 对于
-f分量:相位差为-2πfΔt
因此,两个分量的相位差为:
φ(t,+f)−φ(t,−f)=2πfΔt−(−2πfΔt)=4πfΔt \varphi(t, +f) - \varphi(t, -f) = 2\pi f\Delta t - (-2\pi f\Delta t) = 4\pi f\Delta t φ(t,+f)−φ(t,−f)=2πfΔt−(−2πfΔt)=4πfΔt
2. 分数时延公式
将上式变形,直接得到时延估计:
Δt=φ(tsync,+f)−φ(tsync,−f)4πf \Delta t = \frac{\varphi(t_{sync}, +f) - \varphi(t_{sync}, -f)}{4\pi f} Δt=4πfφ(tsync,+f)−φ(tsync,−f)
t_sync:粗同步得到的序列起始时间Δt:需要估计的分数时延(小于一个采样周期)
3. 最终ToA估计
接收端的实际到达时间(ToA)为:
ToA=tsync+Δt ToA = t_{sync} + \Delta t ToA=tsync+Δt
这个结果用于3.1节的RTT计算。
五、完整推导过程
步骤1:建立带时延的接收信号模型
接收端收到的单音信号(含分数时延 Δt)为:
S(n,t)=aej2πf(t+nTs+Δt) S(n,t) = a e^{j2\pi f (t + nT_s + \Delta t)} S(n,t)=aej2πf(t+nTs+Δt)
步骤2:代入正频率相关运算
将信号代入 φ(t, +f):
∑n=0LS(n,t)e−j2πfnTs=aej2πf(t+Δt)∑n=0L1 \sum_{n=0}^{L} S(n,t) e^{-j2\pi f n T_s} = a e^{j2\pi f(t+\Delta t)} \sum_{n=0}^{L} 1 n=0∑LS(n,t)e−j2πfnTs=aej2πf(t+Δt)n=0∑L1
取相位得:
φ(t,+f)=2πf(t+Δt) \varphi(t, +f) = 2\pi f(t + \Delta t) φ(t,+f)=2πf(t+Δt)
步骤3:代入负频率相关运算
同理,代入 φ(t, -f):
∑n=0LS(n,t)e+j2πfnTs=aej2πf(t+Δt)∑n=0Lej4πfnTs \sum_{n=0}^{L} S(n,t) e^{+j2\pi f n T_s} = a e^{j2\pi f(t+\Delta t)} \sum_{n=0}^{L} e^{j4\pi f n T_s} n=0∑LS(n,t)e+j2πfnTs=aej2πf(t+Δt)n=0∑Lej4πfnTs
由于 L 是整数个周期,求和项为常数,取相位得:
φ(t,−f)=2πf(t−Δt) \varphi(t, -f) = 2\pi f(t - \Delta t) φ(t,−f)=2πf(t−Δt)
步骤4:计算相位差
两式相减,t 项抵消:
φ(t,+f)−φ(t,−f)=4πfΔt \varphi(t, +f) - \varphi(t, -f) = 4\pi f\Delta t φ(t,+f)−φ(t,−f)=4πfΔt
步骤5:解出分数时延
Δt=φ(t,+f)−φ(t,−f)4πf \Delta t = \frac{\varphi(t, +f) - \varphi(t, -f)}{4\pi f} Δt=4πfφ(t,+f)−φ(t,−f)
六、关键优势与工程意义
- 突破采样率限制 :分数时延
Δt可以远小于采样周期T_s,实现亚纳秒级定时精度 - 抗频偏能力:正负频率分量的相位差抵消了载波频偏的影响
- 精度与积分周期成正比 :积分周期
M越大,相位估计越稳定,时延精度越高 - 解决粗同步误差 :与
t_sync结合,实现"粗同步+精估计"的两级定时架构
七、总结
本节通过周期性序列的正负频率分量相位差 ,计算出小于一个采样周期的分数时延,将粗同步 t_sync 修正为高精度ToA,为蓝牙CS RTT测距提供了基础定时精度。
严格数学证明:GFSK 0/1 交替序列 等效分解为 ±f 两个复正弦
全程从 GFSK 时域定义 → 01交替波形 → 傅里叶级数分解 → 化简为双复单音,一步不跳,纯数学推导。
一、先定义基础参数
- 符号周期:(Ts)(T_s)(Ts)
- 蓝牙 CS 探测序列:连续交替比特
bn∈{0,1},bn=n mod 2 b_n \in \{0,1\},\quad b_n = n\bmod 2 bn∈{0,1},bn=nmod2
时序:(...,0,1,0,1,0,1... )(\dots,0,1,0,1,0,1\dots)(...,0,1,0,1,0,1...) - 交替序列完整波形周期:
一个周期包含 2 个符号
T0=2Ts T_0 = 2T_s T0=2Ts
基波频率:
f0=1T0=12Ts f_0 = \frac{1}{T_0} = \frac{1}{2T_s} f0=T01=2Ts1
二、GFSK 时域信号数学定义
GFSK 是连续相位频移键控 ,基带复包络:
s(t)=exp{j2πΔf∫−∞t∑nbn⋅g(τ−nTs)dτ} s(t) = \exp\left\{ j 2\pi \Delta f \int_{-\infty}^{t} \sum_{n} b_n \cdot g(\tau - nT_s) d\tau \right\} s(t)=exp{j2πΔf∫−∞tn∑bn⋅g(τ−nTs)dτ}
- (Δf)(\Delta f)(Δf):GFSK 频偏
- (g(t))(g(t))(g(t)):高斯成形脉冲
- (bn)(b_n)(bn):发送比特 0/1
关键特性
交替序列 (bn=0,1,0,1⋯ )(b_n=0,1,0,1\cdots)(bn=0,1,0,1⋯) 送入高斯滤波器后,积分结果是周期线性斜坡 ,最终:
GFSK 输出是恒定包络、周期为 (T0=2Ts)(T_0=2T_s)(T0=2Ts) 的周期相位调制信号 :
s(t+T0)=s(t) s(t + T_0) = s(t) s(t+T0)=s(t)
👉 结论:0/1 交替 GFSK 信号是严格周期信号。
三、周期信号通用傅里叶级数展开
任意以 (T0)(T_0)(T0) 为周期的复周期信号,都可以展开为傅里叶级数 :
s(t)=∑k=−∞∞Ck ej2πkf0t s(t) = \sum_{k=-\infty}^{\infty} C_k \, e^{j 2\pi k f_0 t} s(t)=k=−∞∑∞Ckej2πkf0t
其中:
Ck=1T0∫0T0s(t) e−j2πkf0tdt C_k = \frac{1}{T_0}\int_{0}^{T_0} s(t)\,e^{-j2\pi k f_0 t} dt Ck=T01∫0T0s(t)e−j2πkf0tdt
四、代入 0/1 交替 GFSK 的对称性
1. 奇偶对称性
序列 0,1 交替满足:
s(t+T02)=−s(t) s\left(t+\frac{T_0}{2}\right) = -s(t) s(t+2T0)=−s(t)
代入傅里叶级数:
∑kCkej2πkf0(t+T0/2)=−∑kCkej2πkf0t \sum_{k} C_k e^{j2\pi k f_0 (t+T_0/2)} = -\sum_{k} C_k e^{j2\pi k f_0 t} k∑Ckej2πkf0(t+T0/2)=−k∑Ckej2πkf0t
利用 (f0T0=1)(f_0 T_0=1)(f0T0=1):
ej2πkf0⋅T02=ejπk=(−1)k e^{j2\pi k f_0 \cdot \frac{T_0}{2}} = e^{j\pi k} = (-1)^k ej2πkf0⋅2T0=ejπk=(−1)k
得约束:
(−1)kCk=−Ck (-1)^k C_k = -C_k (−1)kCk=−Ck
(−1)k+1Ck=0 \big(-1)\^k + 1\\big C_k = 0 (−1)k+1Ck=0
2. 筛选谐波次数
- 当 (k)(k)(k) 为偶数 :((−1)k+1=2≠0 ⟹ Ck=0)((-1)^k+1=2\ne0 \implies C_k=0)((−1)k+1=2=0⟹Ck=0)
- 当 (k)(k)(k) 为奇数:系数可不为 0
👉 仅奇次谐波存在,偶次谐波全部为 0。
五、GFSK 高斯滤波:只保留基波 (k=±1)(k=\pm1)(k=±1)
高斯脉冲 (g(t))(g(t))(g(t)) 是低通平滑特性,会滤除高次谐波:
- (k=±3,±5,... )(k=\pm3,\pm5,\dots)(k=±3,±5,...) 高次谐波被高斯滤波衰减至近似 0
- 仅剩最低阶奇次谐波:(k=+1, k=−1)(\boldsymbol{k=+1,\;k=-1})(k=+1,k=−1)
因此傅里叶级数截断近似 为:
s(t)≈C+1ej2πf0t + C−1e−j2πf0t s(t) \approx C_{+1} e^{j2\pi f_0 t} \;+\; C_{-1} e^{-j2\pi f_0 t} s(t)≈C+1ej2πf0t+C−1e−j2πf0t
令:
a=C+1,C−1=a∗ a = C_{+1},\quad C_{-1}=a^* a=C+1,C−1=a∗
(实波形频谱共轭对称)
记作:
S+f(t)=a ej2πf0tS−f(t)=a∗ e−j2πf0t \boxed{ \begin{aligned} S_{+f}(t) &= a\,e^{j2\pi f_0 t} \\ S_{-f}(t) &= a^*\,e^{-j2\pi f_0 t} \end{aligned} } S+f(t)S−f(t)=aej2πf0t=a∗e−j2πf0t
工程上统一简写为:
S+f(t)=aej2πft,S−f(t)=ae−j2πft S_{+f}(t)=a e^{j2\pi f t},\quad S_{-f}(t)=a e^{-j2\pi f t} S+f(t)=aej2πft,S−f(t)=ae−j2πft
六、最终数学结论
- 0/1 交替比特 → GFSK 调制后是严格周期信号;
- 由奇偶对称性,仅含奇次谐波;
- 高斯低通滤波抑制高次谐波,只保留 (k=±1)(k=\pm1)(k=±1) 基波;
- 周期信号傅里叶级数截断后,严格等效为正负频率两个复正弦叠加。
s(t)=aej2πft+a∗e−j2πft \boldsymbol{ s(t) = a e^{j2\pi f t} + a^* e^{-j2\pi f t} } s(t)=aej2πft+a∗e−j2πft
这就从数学上严格证明 了:
GFSK 的 0/1 交替探测序列,可以等效表示为两个复单音信号。
补充:为什么能用它做分数时延估计
复正弦带时延 (τ)(\tau)(τ):
ej2πf(t+τ)=ej2πft⋅ej2πfτ e^{j2\pi f(t+\tau)} = e^{j2\pi f t}\cdot e^{j2\pi f \tau} ej2πf(t+τ)=ej2πft⋅ej2πfτ
时延完全映射为固定相位偏移 ;
再用 (±f)(\pm f)(±f) 两路相位做差,就能抵消载波频偏,解出亚采样分数时延,就是你蓝牙标准那套公式的理论根基。
复信号求和的意义
公式四是:
φ(t,+f)=∠(∑n=0LS(n,t)×e−j2πfnTs) \varphi(t, +f) = \angle\left( \sum_{n=0}^{L} S(n,t) \times e^{-j2\pi f n T_s} \right) φ(t,+f)=∠(n=0∑LS(n,t)×e−j2πfnTs)
它的顺序是:先做复数值求和,再对结果取相位。
一、为什么必须求和?(核心物理原因)
这个求和,本质上是相干积分,有两个关键作用:
- 增强信号,压制噪声
- 利用周期性信号的同相叠加,让相关峰更尖锐
我们一步步用数学推导来证明。
二、推导:求和的真实效果
1. 接收信号模型(带时延和噪声)
设接收信号为:
S(n,t)=Aej2πf(t+nTs+Δt)+w(n) S(n,t) = A e^{j2\pi f(t + nT_s + \Delta t)} + w(n) S(n,t)=Aej2πf(t+nTs+Δt)+w(n)
- Aej2πf(t+nTs+Δt)A e^{j2\pi f(t + nT_s + \Delta t)}Aej2πf(t+nTs+Δt):我们关心的周期性单音信号
- w(n)w(n)w(n):零均值高斯白噪声
- Δt\Delta tΔt:分数时延
2. 代入求和项(正频率相关)
∑n=0LS(n,t)e−j2πfnTs=∑n=0LAej2πf(t+nTs+Δt)+w(n)e−j2πfnTs \sum_{n=0}^{L} S(n,t) e^{-j2\pi f n T_s} = \sum_{n=0}^{L} \left A e\^{j2\\pi f(t + nT_s + \\Delta t)} + w(n) \\right e^{-j2\pi f n T_s} n=0∑LS(n,t)e−j2πfnTs=n=0∑LAej2πf(t+nTs+Δt)+w(n)e−j2πfnTs
展开后分成两项:
=Aej2πf(t+Δt)∑n=0L1+∑n=0Lw(n)e−j2πfnTs = A e^{j2\pi f(t + \Delta t)} \sum_{n=0}^{L} 1 + \sum_{n=0}^{L} w(n) e^{-j2\pi f n T_s} =Aej2πf(t+Δt)n=0∑L1+n=0∑Lw(n)e−j2πfnTs
信号项的变化
- 求和部分 ∑n=0L1=L+1\sum_{n=0}^{L} 1 = L+1∑n=0L1=L+1,是个正实数常数。
- 信号项变成:
(L+1)⋅Aej2πf(t+Δt) (L+1) \cdot A e^{j2\pi f(t + \Delta t)} (L+1)⋅Aej2πf(t+Δt)
相位完全没有变化 ,只是幅度放大了 L+1L+1L+1 倍。
噪声项的变化
噪声是零均值、不相关的,所以:
E∑n=0Lw(n)e−j2πfnTs=0 \mathbb{E}\left \\sum_{n=0}\^{L} w(n) e\^{-j2\\pi f n T_s} \\right = 0 En=0∑Lw(n)e−j2πfnTs=0
噪声项是随机游走,不会相干叠加,只会在零附近波动。
三、取相位后的结果
对求和结果取相位:
φ(t,+f)=∠((L+1)Aej2πf(t+Δt)+噪声余项) \varphi(t, +f) = \angle\left( (L+1)A e^{j2\pi f(t + \Delta t)} + \text{噪声余项} \right) φ(t,+f)=∠((L+1)Aej2πf(t+Δt)+噪声余项)
当 LLL 足够大时,信号项幅度远大于噪声项,结果为:
φ(t,+f)≈2πf(t+Δt) \varphi(t, +f) \approx 2\pi f(t + \Delta t) φ(t,+f)≈2πf(t+Δt)
结论:求和并没有改变相位,反而通过放大信号、压制噪声,让相位估计更稳定。
四、如果不求和,会发生什么?
如果你不取L个样本的和,只取单个样本:
φ(t,+f)=∠(S(0,t)e0) \varphi(t, +f) = \angle\left( S(0,t) e^{0} \right) φ(t,+f)=∠(S(0,t)e0)
这个相位会被噪声严重污染,根本无法用于时延估计。
而求和之后,噪声被平均掉,相位估计的信噪比提升了 L+1\sqrt{L+1}L+1 倍。
五、总结
- 公式四的求和是相干积分,目的是放大信号、压制噪声。
- 因为信号是周期性的,求和时信号同相叠加,幅度放大,但相位保持不变。
- 噪声是随机的,求和时相互抵消,均值趋近于0。
- 最终取相位,得到的依然是和时延直接相关的相位值,而不是L个相位的和。