一、概要
1.专栏定位
这是一个指导Linux入门的同学从零搭建一个嵌入式Linux控制服务平台的专栏,为大家提供一个可参考的Linux实战项目。笔者也是从0学到现在的,体会过"死活找不到合适项目用来仿写"的尴尬期,所以现在想和大家分享的,不仅是从技术角度的死板教程,更是从工程角度总揽全局,教会你如何从0开始搭建一个属于自己的项目
2.目标读者
-
✅ 有 C++ 基础(语法 + STL 能用),想理解嵌入式 Linux 应用层服务设计的同学
-
✅ 学过 socket 编程、写过简单 IPC,写起代码来"头重脚轻",大型项目从零上手没思路的同学
-
❌ 不适合:刚开始学 C 的纯小白;想看一个 ROS2 / D-Bus 替代品的资深 SDE
3.仓库地址
项目仓库:<仓库将在RERADME与基础示例补齐后开放>
笔者是一个大三的手残党,结合自己的日常积累,参考了一些优秀的模块设计思路,完成了这样一个Linux控制服务平台,总的来说还是资历浅浅,发出来也希望能和大家多多交流,大家如果有更好的建议或者改进方法,也可以评论或者私聊笔者,欢迎大家多多锐评(手动狗头)
二、设计目的
1.嵌入式 Linux 设备端缺一个什么样的东西?
想象一个场景:如果要从0开始设计一款扫地机器人(或者是相机、音响,随你想),这些消费设备通常包含多个复杂的进程和资源,比如可能包含外部信息采集模块(视觉、激光等)、UI/客户端进程、底层的Hald进程等等。这些复杂的进程需要一个常驻服务进程做"对外接入+内部协调资源"的工作,如果每次都从0搭建,非常繁琐且冗余。
如果我们把这个"常驻服务进程"抽象成一个包含基础设施、协议、服务层、ctl客户端于一体的控制服务系统,使用时只需要接入外部模块,是否就会变得非常方便呢?这就是我们即将搭建的------MiniDeviceProxy控制服务平台。
MiniDeviceProxy 的目标是面向嵌入式 Linux 单设备场景,提供一个轻量、可裁剪、易二次开发的本地控制服务骨架。相比脚本式控制方式,它具备常驻服务、统一 IPC、配置中心、状态裁决和后台任务管理能力。
因此,本项目更适合作为学习嵌入式 Linux 应用层服务设计的实战项目,也可以作为小型设备控制服务的基础骨架。
2.为什么不使用优秀的开源框架?
|---------|---------------------------------------------------------------------------------------|
| 方案 | 不适用的原因 |
| ROS/DDS | 面向多机分布式机器人节点通信,QoS、节点发现、序列化都很重;本地单设备控制场景属于"杀鸡用牛刀",且嵌入式裁剪成本高 |
| D-Bus | D-Bus 是成熟的通用本地服务总线,在桌面和嵌入式系统中都有大量应用;但其对象模型、接口描述和依赖体系对学习型小项目而言偏重,本项目更关注可控、可裁剪的设备控制面骨架。 |
| 自行搭建 | 每个项目从零写一套 IPC + 状态管理 + 配置中心,模块边界、命名、错误处理风格各异,无法跨项目沉淀 |
3.项目定位
▎ "面向嵌入式 Linux 单设备场景的轻量级控制与任务编排平台。"
五个特征:轻量、本地优先、控制平面导向、易部署易裁剪、对二次开发友好。
三、主体设计思路
1.进程模型
cpp
mini_proxyd(服务端) + mini_ctl(CLI 客户端)2.架构图
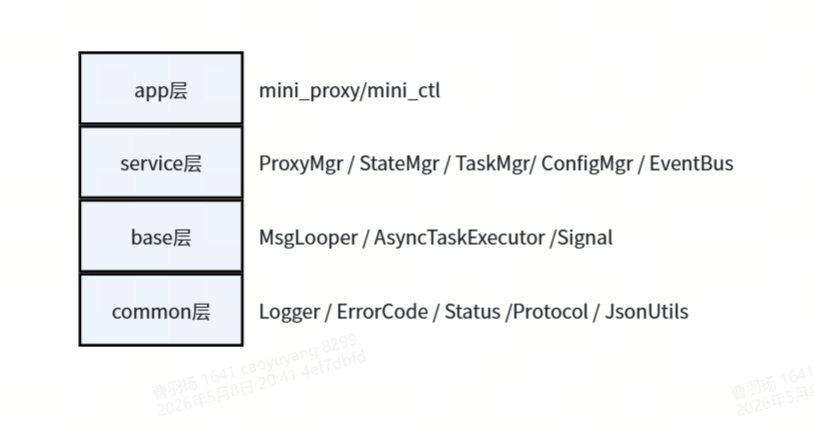
层级职责:
-
app:进程入口,初始化与退出
-
service:平台内核管理器(路由、状态、任务、配置、事件)
-
base:执行与并发基础设施
-
common:日志、错误码、协议结构、JSON 工具
3.模块核心职责
|-----------|------------------|--------------------------|
| 模块 | 职责 | 关键约束 |
| ProxyMgr | 统一调度入口,路由请求到内部模块 | 不直接做业务裁决 |
| StateMgr | 系统状态唯一裁决者 | 模块只能 publish 事件,不可更改系统状态 |
| TaskMgr | 后台长任务唯一管理者 | 任务状态与系统状态有明确边界 |
| ConfigMgr | 配置文件唯一真源 | 写盘走临时文件 + rename |
| EventBus | 进程内事件发布 / 订阅 | 不持有线程,按订阅方提供的looper 异步分发 |
| MsgLooper | 控制面线程顺序的承载者 | 所有系统状态变更必须在它的线程上执行 |
四、项目学习价值
4.1 跟着这个专栏能学到什么?
C++ 工程能力:
-
现代 C++17:RAII、tl::expected / std::variant、模板状态类、std::function 包装
-
CMake 多 target 工程组织(app / lib / test 边界)
-
单元测试组织(CTest + 自定义最小断言宏)
系统编程:
-
Unix Domain Socket:监听、接受、收发、长度前缀分帧、EINTR 处理
-
信号处理与优雅退出(SIGINT / SIGTERM 接管)
-
POSIX 文件系统:原子写盘(temp file + rename)
-
多线程:mutex、condition_variable、线程不变量约定
架构设计:
-
模块边界划分(service / base / common 分层)
-
事件驱动状态机的运行时模型(事件 → looper → 状态机裁决)
-
IPC 协议设计(长度前缀 + JSON payload + 请求 / 响应模型)
-
配置中心设计
项目落地(展示项目的真实落地能立,但不是核心): -
交叉编译 toolchain
-
systemd 服务部署
-
板端 GPIO 控制
-
LVGL 板端 UI
五、系统主要功能
1.已实现的能力
✅ mini_proxyd 服务端常驻进程
✅ mini_ctl 命令行客户端
✅ Unix Domain Socket IPC(长度前缀分帧 + EINTR 处理)
✅ JSON 请求 / 响应协议(含版本字段、request_id、错误码)
✅ ProxyMgr 统一命令路由
✅ ConfigMgr 配置加载 / 读取 / 修改 / 持久化
✅ MsgLooper 控制面消息循环
✅ AsyncTaskExecutor 后台任务执行
✅ EventBus 进程内事件总线(订阅 RAII / 异步分发)
✅ StateMgr 事件驱动状态机(已接入主线)
✅ Logger 彩色日志 / 多级别 / 线程标识
✅ Signal 优雅退出
2.当前支持的命令
|--------|-------------|-----------|---------------|
| 模块 | 命令 | 参数 | 说明 |
| system | status | 无 | 查询服务运行状态 |
| system | help | 无 | 帮助信息 |
| state | get | 无 | 查询当前系统状态 |
| state | reset | 无 | 触发状态机回到 Ready |
| config | get_config | key | 读取配置项 |
| config | set_config | key value | 修改配置 |
| config | save_config | 无 | 保存配置到文件 |
下面是一个简单的demo演示系统的基本工作流程:
bash
# 启动服务端
$ ./mini_proxyd
[INFO] mini_proxyd starting...
[INFO] EventBus initialized
[INFO] StateMgr entered state: Ready
[INFO] Listening on /tmp/mini_proxyd.sock
# 另起一个终端
$ ./mini_ctl state get
{"code":0,"data":{"state":"Ready"}}
$ ./mini_ctl state reset
{"code":0,"message":"reset event published"}
$ ./mini_ctl config set_config ipc.backlog 8
$ ./mini_ctl config save_config
六、尾声
本篇介绍了项目定位和项目能力,不知道有没有吸引到大家。评论区:你最关心专栏写哪一块?欢迎留言,下一篇会优先回应高赞问题
下一篇更新时间:2026.5.15前(笔者是实习打工的牛马,时间比较稀缺,读者大佬们海涵)