让一群简单的机器人通过局部互动完成复杂任务,是机器人集群的核心魅力。
但传统方法下,每个机器人的行为都需要专家提前硬编码------耗时、死板,更难以应对现实世界中的突发状况。如今,以大型语言模型(LLM)、视觉语言模型(VLM)为代表的基础模型(Foundation Models, FM),正为这一领域带来一场全新的变革。
2026年4月29日,《Science Robotics》发表了一篇题为 《基础模型将如何革新机器人群体》 的观点文章。来自欧洲的学者系统提出:基础模型不仅可以帮助设计 机器人群体,还可以直接充当群体中的智能操作员,让集群在未知环境中真正"活"起来。
一、背景:机器人群体为何需要基础模型?
机器人群体由大量简单、去中心化的机器人组成,彼此仅靠本地通信协同工作。它们天然具备可扩展性 和鲁棒性,非常适合灾害响应、环境监测等任务。
但现有设计流程存在明显短板:
-
控制器由专家手动编写:过程复杂、耗时、易错。
-
无法应对未知事件:硬编码的逻辑在部署中遇到全新场景(如突然出现的伤员)时无能为力。
-
非专业人员难以介入:普通操作员无法快速调整任务指令。
基础模型(尤其是多模态版本)的出现,恰好为这些问题提供了新的解法。这类模型在海量文本、图像、甚至物理交互数据上训练,具备推理、规划、代码生成和多模态理解 能力。将它们嵌入机器人集群,有望赋予系统前所未有的灵活性与自主性。
二、两种核心路径:FM 作为"设计者"与"操作员"
文章提出了两种互补的集成范式:
1. FM 作为群体设计者(Swarm Designer)
核心思想:让 FM 自动生成机器人控制器的代码,并进行高层任务规划。
-
离线设计:人类用自然语言或草图描述期望的群体行为(如"形成一个搜索队形"),FM 自动翻译成可在仿真或真实机器人上运行的控制器。
-
在线合成:当机器人在部署中发现自己缺乏某种能力(如需要爬楼梯但未编程),可实时调用 FM 生成新的控制模块,实现"自我进化"。
关键挑战 :如何验证生成的代码确实产生预期的群体级行为 ?
文章提出多步验证:语法检查 → 仿真评估(结合 VLM 视频分析或人工观察)→ 部署后反馈迭代。同时,必须防范 FM 可能引入的安全漏洞(如后门代码)。
带来的机会:
-
大幅缩短开发周期,降低门槛,让非专家也能"定制"机器人集群。
-
使机器人群体在真实、动态环境中保持响应性,无需预设所有可能场景。
2. FM 作为群体操作员(Swarm Operator)
核心思想:将传感器的实时输入(图像、消息等)注入 FM 提示,让模型直接输出控制指令或高层决策。
-
例如,一个机器人拍下松动的螺栓图像,FM 识别出问题后,尝试调用"拧紧"功能;若该功能不存在,则转交给"设计者"模块实时合成。
-
不同机器人可以使用各自微调过的 VLM,从而对同一个高层命令(如"搜索受害者")产生适应自身能力的差异化执行方式。
两大应用场景:
-
机器人-机器人协作:FM 提供世界知识和情境推理,让集群自发协调任务、分配角色,甚至使用自然语言互相沟通。
-
人-群交互:普通操作员可用语音或聊天界面向集群下达指令,FM 处理上下文、提出澄清问题,显著降低认知负担,提升信任与透明度。
带来的机会:
-
群体行为更智能、更具适应性。
-
人机交互前所未有地直观------甚至可以用手指画出"在这里集合"。
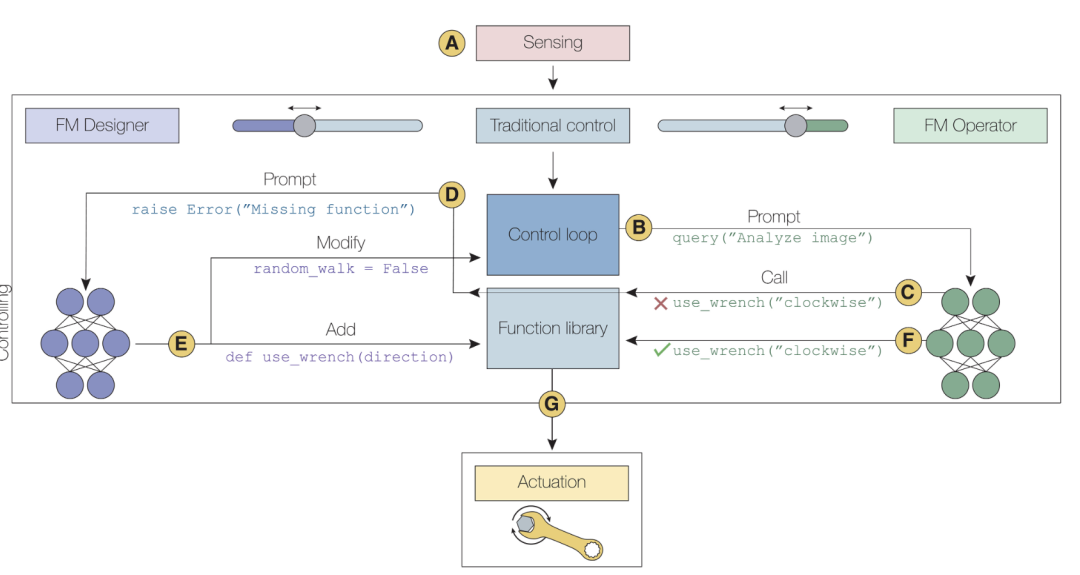
三、综合控制架构:三者协作,各司其职
文章提出,最实用的系统应融合"FM设计者"、"FM操作员"和传统控制器,形成一个分层架构:
-
传统控制器负责底层快速响应(如避障、跟随)。
-
FM操作员负责实时感知、推理、决策和通信。
-
FM设计者在必要时介入,合成缺失的功能或重写规划策略。
图1展示了这样一个工作流:机器人发现松动螺栓 → FM操作员识别问题 → 试图调用动作函数但找不到 → FM设计者实时生成该函数并分发至群体 → 操作员再次调用成功 → 群体协同拧紧螺栓。
整个过程无需人类介入。
四、必须正视的挑战:从微观‑宏连接到安全性
尽管前景诱人,FM 赋能机器人集群仍面临一系列根本挑战:
-
微观‑宏连接问题
FM 本身并不理解"单个规则如何涌现出群体行为"。必须引入专门的验证步骤(如 VLM 分析群体视频),避免集体行为失控。
-
从控制器设计转向规范设计
手动编写代码将变为手动设计提示词和交互方式。需要建立系统的设计指南和对比研究,帮助开发者高效"提示"FM。
-
人类视角 vs. 机器人视角
现有 FM 多训练自人类数据,而机器人的感知世界方式不同。可能需要利用机器人生成的数据微调模型;同时,类人视角也有助于让行为更符合伦理和社会规范。
-
硬件限制、可扩展性与分区
-
小型机器人计算资源有限,需采用轻量化 FM、量化、剪枝、蒸馏等技术。
-
群体规模扩大时,交互历史可能导致提示过长。可通过限制通信半径、使用检索增强生成(RAG)来缓解。
-
通信分区可能造成子群体间行为不一致。可采用统一提示、共识投票、或让 FM 主动控制机器人运动以保持连接。
-
-
可控性、安全性与安全性(Safety & Security)
-
FM 输出的概率性意味着无法百分百保证群体行为符合预期。需要逻辑验证、沙箱限制、允许列表、监控与冗余。
-
防范提示注入攻击、幻觉 API 调用等问题。
-
最极端情况下,开放式进化的 FM 集群可能导致人类控制权丧失。文章强调:必须在探索潜力的同时,系统性地研究风险。
-
五、结论:一场刚刚开始的变革
基础模型正在为机器人集群带来真正的"自主进化"能力。从自动生成控制器,到实时理解人类指令,再到在灾难现场灵活应对从未见过的情况------这些曾经属于科幻的场景,正在一步步走向现实。
当然,这条路不能只追求"智能"而忽视"可控"。正如作者所言,研究应当在对潜力的探索与对风险的严谨调查之间取得平衡。唯有如此,我们才能迎来真正安全、可靠且适应性强的机器人集群时代。
原文信息
-
标题:How foundation models will revolutionize robot swarms
-
作者:Volker Strobel, Marco Dorigo, Mario Fritz
-
期刊:Science Robotics
-
日期:2026年4月29日,第11卷,第113期
-
DOI:10.1126/scirobotics.adz1543