目录
[5.1 对抗博弈目标函数](#5.1 对抗博弈目标函数)
[5.2 生成器网络前向传播](#5.2 生成器网络前向传播)
[5.3 判别器网络前向传播](#5.3 判别器网络前向传播)
[5.4 生成器和判别器损失函数与梯度计算](#5.4 生成器和判别器损失函数与梯度计算)
[5.5 虚拟场景三维构建方法](#5.5 虚拟场景三维构建方法)
✨1.前言
生成对抗网络(Generative Adversarial Network, GAN)是深度学习领域中最具创新性的生成模型架构之一,由Ian Goodfellow于2014年提出。GAN通过构建生成器与判别器两个神经网络的对抗博弈实现高质量数据生成。在虚拟场景构建领域,GAN能够学习真实地形、纹理和场景的统计分布特征,生成逼真的虚拟环境数据,为计算机图形学、游戏开发、仿真训练等应用提供高效的内容创建方案。基于GAN的虚拟场景构建技术已成为AIGC(人工智能生成内容)领域的研究热点。
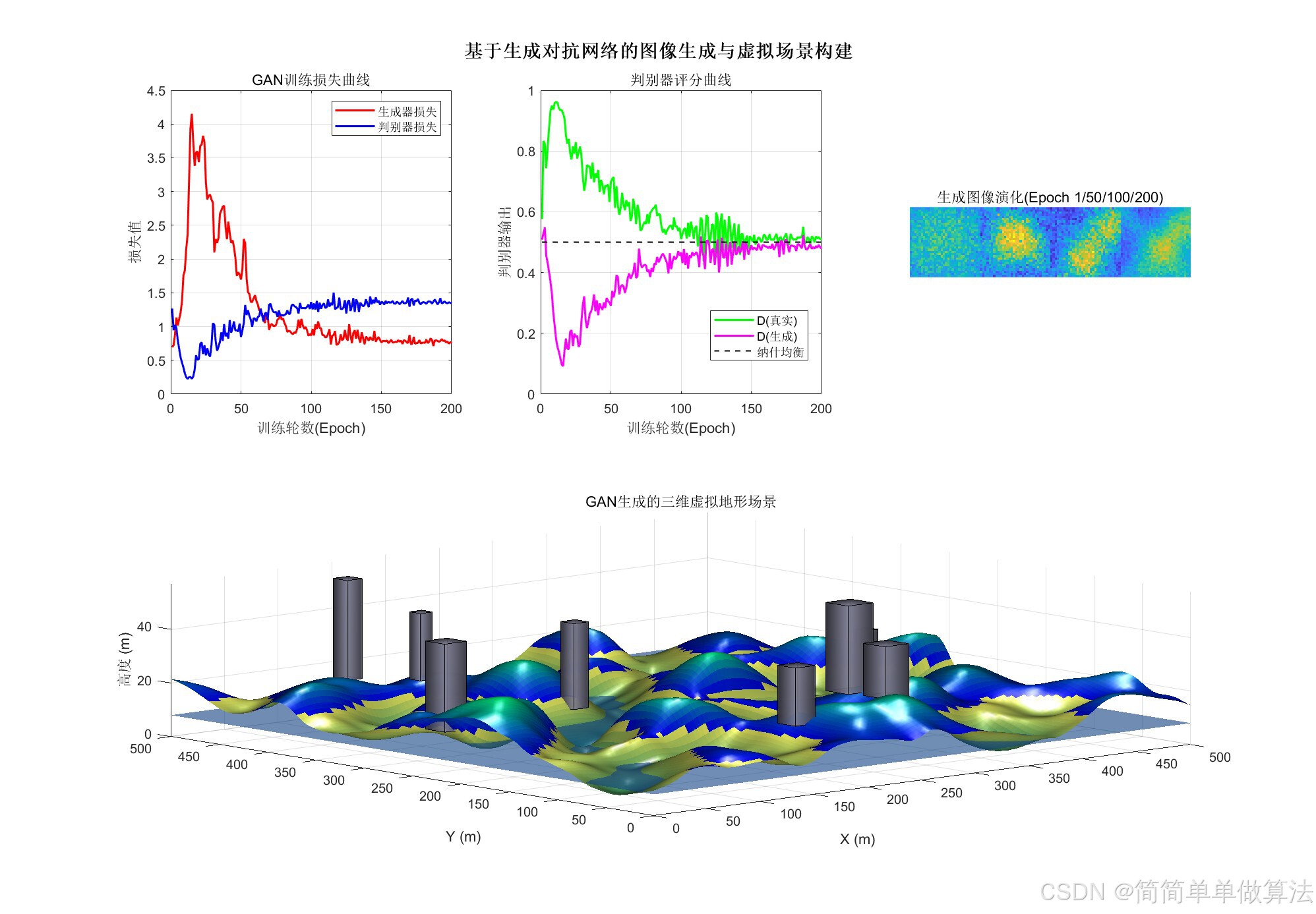
📡2.算法测试效果图预览
🔍3.算法运行软件版本
matlab2024b
✅4.部分核心程序
% 添加虚拟建筑物
num_buildings = 8;
for b = 1:num_buildings
bx = rand*400 + 50; by = rand*400 + 50;
bw = 10 + rand*15; bh = 15 + rand*25;
[bx_idx, by_idx] = deal(round(bx/500*scene_size), round(by/500*scene_size));
bx_idx = max(1, min(scene_size, bx_idx));
by_idx = max(1, min(scene_size, by_idx));
base_h = terrain_map(by_idx, bx_idx);
if base_h > water_level
vertices = [bx-bw/2, by-bw/2, base_h; bx+bw/2, by-bw/2, base_h;
bx+bw/2, by+bw/2, base_h; bx-bw/2, by+bw/2, base_h;
bx-bw/2, by-bw/2, base_h+bh; bx+bw/2, by-bw/2, base_h+bh;
bx+bw/2, by+bw/2, base_h+bh; bx-bw/2, by+bw/2, base_h+bh];
faces = [1 2 6 5; 2 3 7 6; 3 4 8 7; 4 1 5 8; 5 6 7 8; 1 2 3 4];
patch('Vertices', vertices, 'Faces', faces, 'FaceColor', [0.6 0.6 0.7], 'FaceAlpha', 0.9);
end
end
colormap(gca, [summer(128); winter(128)]);
lighting gouraud; camlight('headlight');
xlabel('X (m)'); ylabel('Y (m)'); zlabel('高度 (m)');
title('GAN生成的三维虚拟地形场景');
view([-35, 30]); axis tight;
set(gca, 'FontSize', 10);
sgtitle('基于生成对抗网络的图像生成与虚拟场景构建', 'FontSize', 14, 'FontWeight', 'bold');
saveas(gcf, 'GAN_results.png');
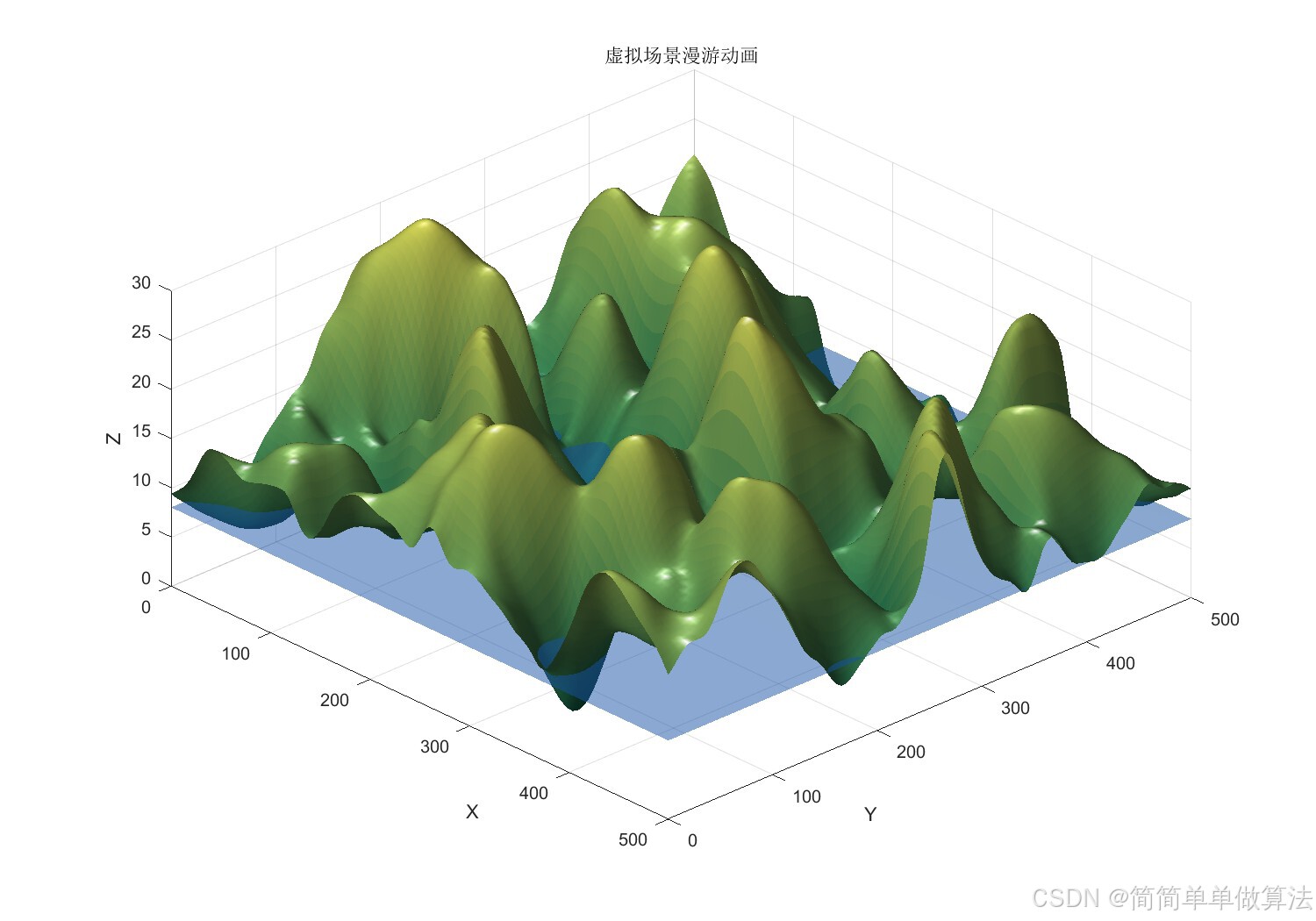
%% ===== 第十部分: 虚拟场景漫游动画 =====
figure('Position', [100, 100, 1000, 700], 'Name', '虚拟场景三维漫游');
surf(X_terrain, Y_terrain, terrain_map, 'EdgeColor', 'none'); hold on;
surf(Xw, Yw, Zw, 'FaceColor', [0.1 0.4 0.8], 'FaceAlpha', 0.5, 'EdgeColor', 'none');
colormap(summer); lighting gouraud; camlight;
xlabel('X'); ylabel('Y'); zlabel('Z');
title('虚拟场景漫游动画');
for angle = 1:360
view([angle, 20 + 10*sind(angle*2)]);
camorbit(1, 0);
drawnow;
pause(0.03);
end
fprintf('\n===== 系统运行完成 =====\n');
fprintf('生成图像分辨率: %dx%d\n', img_size, img_size);
fprintf('虚拟场景尺寸: %dx%d (%.0fm x %.0fm)\n', scene_size, scene_size, 500, 500);
fprintf('最终生成器损失: %.4f\n', G_losses(end));
fprintf('最终判别器损失: %.4f\n', D_losses(end));
259🚀5.算法理论概述
5.1 对抗博弈目标函数
GAN的训练过程本质上是一个极小极大博弈(Minimax Game)。生成器GG试图生成以假乱真的样本欺骗判别器,判别器DD则努力区分真实样本和生成样本。其优化目标函数为:

其中pdata(x)为真实数据分布,pz(z)为潜在空间的先验分布(通常为标准正态分布),G(z)为生成器的输出,D(x)为判别器对输入样本为真实的概率估计。
5.2 生成器网络前向传播
生成器网络将随机噪声向量映射为图像空间的样本。采用多层全连接网络结合非线性激活函数:
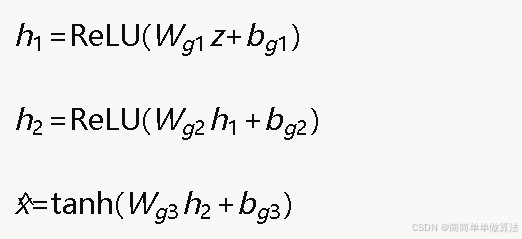
其中ReLU激活函数定义为ReLU(x)=max(0,x),Tanh函数将输出约束在−1,1范围内,与归一化后的图像像素值域匹配。生成器通过逐层非线性变换实现从低维潜在空间到高维图像空间的复杂映射。
5.3 判别器网络前向传播
判别器网络对输入图像进行真伪分类,采用LeakyReLU激活函数避免梯度消失问题:
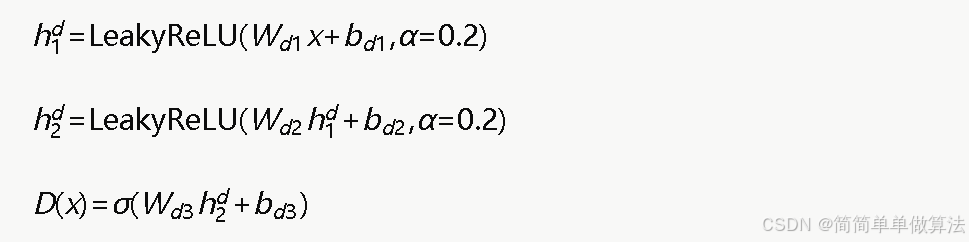
其中LeakyReLU定义为LeakyReLU(x,α)=max(αx,x),Sigmoid函数σ(x)=1/(1+e−x)将输出映射为概率值。
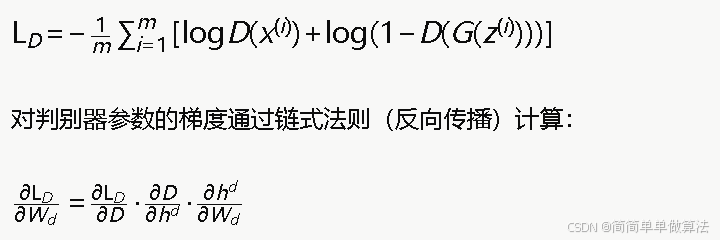
5.4 生成器和判别器损失函数与梯度计算
判别器的目标是最大化正确分类的对数似然,等价于最小化二值交叉熵损失:
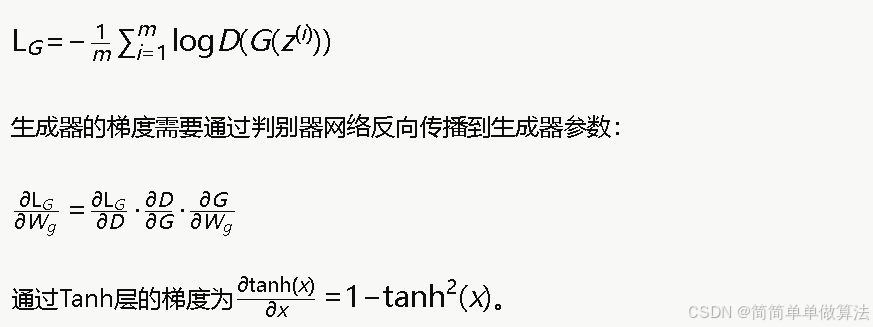
生成器的目标是最大化判别器对生成样本的判定概率,实际训练中采用非饱和损失形式:
5.5 虚拟场景三维构建方法
训练完成后的生成器可产生逼真的地形高度图。通过以下步骤将二维生成图像转化为三维虚拟场景:

三维曲面渲染:将高度图映射到三维网格坐标(X,Y,Z),其中Z=Hsmooth,利用表面着色和光照模型进行真实感渲染。水体、建筑物等场景元素通过程序化生成叠加到地形之上,构成完整的虚拟三维环境场景。
基于GAN的虚拟场景构建技术不仅适用于地形生成,还可扩展至城市建模、室内场景合成、自动驾驶仿真环境构建等应用场景,是数字孪生和元宇宙技术栈中的核心生成式AI组件。
💡6.算法完整程序工程
OOOOO
OOO
O
关注GZH后输入回复:0044