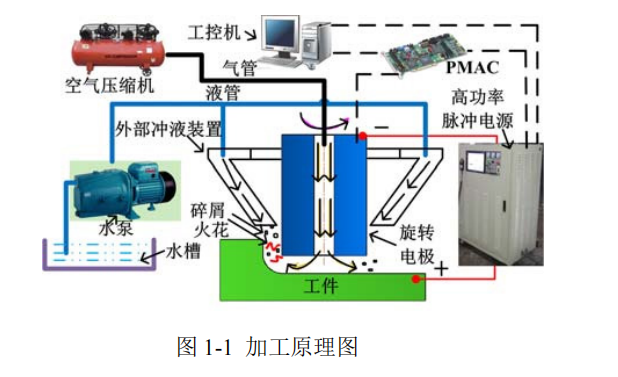
电火花小孔加工工艺在实际应用中主要基于脉冲放电的原理,依赖电蚀作用将被
加工模具的导电物质材料去除,从而满足模具生产中对型孔以及型腔等部分的加工要
求,是一种绿色机械制造加工工艺
制造业中使用的电火花加工机床硬件平台大多结构连接复杂,整体硬件架构老旧,
因此为攻克国内电火花小孔加工机床硬件平台升级的技术瓶颈,需设计构建通用型嵌
入式数控系统硬件平台。本章基于研制单位提供的需要升级改造的 SE-WK008 电火花
小孔加工机床,建立适应多场景下小孔加工需求的开放式硬件体系,分析确定所设计
通用型硬件平台需具备的功能以及总体架构方案,并开展核心控制器的性能评估与选
型,聚焦设计实现系统功能的关键路径。
2.1****控制系统硬件平台需求分析
2.1.1****机床结构与参数
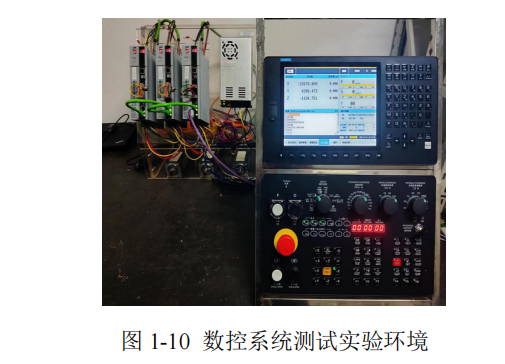
本文所使用的机床由项目委托方某电火花加工设备研制单位提供,机床型号为 SE
WK008,机床类型为六轴电火花加工机床,如图 2-1 所示。该机床主要由床身,X、Y、
Z、W 移动轴,A、C 回转轴,工作液系统,电火花精加工专用高频脉冲电源等组成,
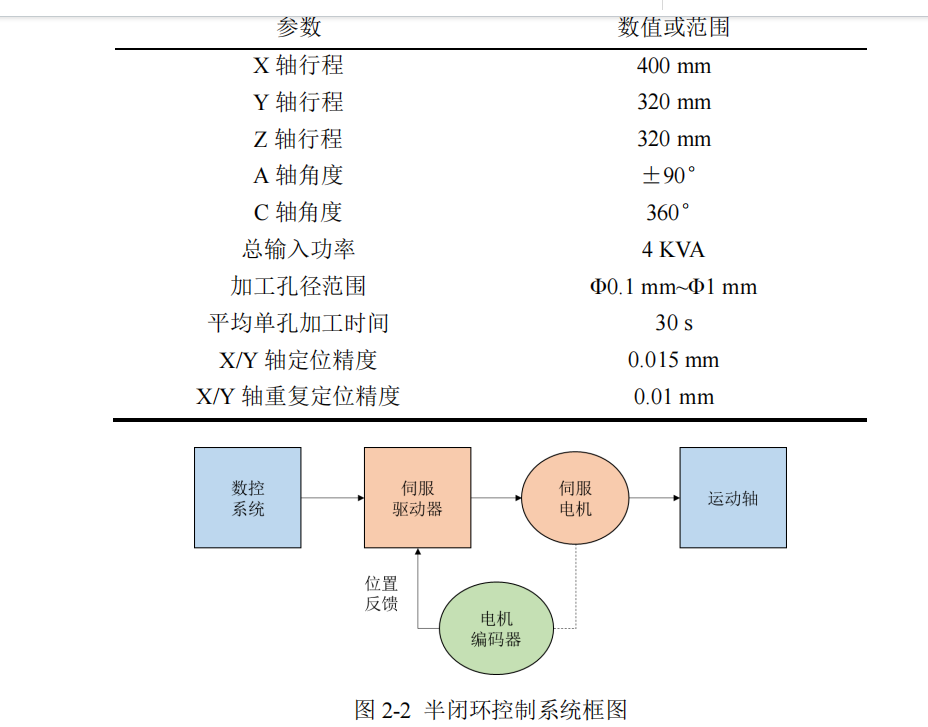
此 SE-WK008 型号机床的主要工作参数见表 2-1。
如图 2-2 所示,本机床中 X、Y、Z、A、C 五轴均采用交流伺服驱动系统,采用交
流伺服电机半闭环位置控制,W 轴作为伺服加工轴则采用步进电机控制。X、Y 轴分别
由精密滚珠丝杠螺母、精密直线导轨、交流伺服电机直拖驱动,实现工件上各加工孔
的定位。Z 轴设置在立柱前部,通过控制 Z 轴上下运动以调节导向器与工件之间的距
离。A 轴轴线与 X 轴平行,C 轴安装在 A 轴的回转盘上,C 轴的轴线垂直于 A 轴的轴
线,通过数控分度盘可实现精密回转分度,变换加工平台空间位置。W 轴设置在 Z 轴
前部,采用滚轮送进方式,细分步进电机驱动,控制电极夹头部分的电极丝进给加工,
W 轴滚轮下方安装有精密导向器,可以进行电极丝的导向,实现精密伺服加工。W 轴
内置高频振动器,加工时会带动电极作高频振动,促进加工中的排屑,振动频率在 300
Hz~800 Hz 范围内可调,振动频率可影响加工效率,为达到最佳的加工稳定性及加工效
率,通常振动频率设置在 500 Hz~700Hz 范围内为最佳状态。
机床工作液系统配置了智能化水电导率控制单元,通过在线式电化学传
感装置实时监测水体导电特性,并联动离子交换树脂单元实现工作液的去离子净化处
理。该系统主要包含储液容器、自吸式循环泵、流量调节装置及配套传输管路等核心
组件。在设备运行过程中,经压力调控的冲液通过闭环循环路径持续供给加工区域,
实现加工区域的有效散热,并可及时清除放电加工产生的碎屑。该工作液装置采用一
体化布局设计,集中配置在机床设备的后侧空间,保证了系统加工操作维护的便捷性
与设备的整体空间利用率。
2.1.2****硬件平台的功能需求
制造业现有的电火花加工机床数控系统仍多采用传统工业 PC 机搭配运动卡或 PLC
的形式,如本文所使用的 SE-WK008 机床,为实现加工数字化与实时智能化的发展目
标,该电火花小孔加工机床硬件平台需突破升级难关,以满足各领域日益发展的制造
需求。本文以实现上述型号机床加工功能为基础,分析所设计的通用型数控系统硬件
平台需实现的功能需求,具体如下:
1)充分实现电火花小孔加工机床的加工功能
所设计的硬件平台需可配合加工设备实现加工过程中的一系列工艺功能,主要涵
盖螺补齿补、G/NC 代码编译、插补计算、人机交互、穿透检测、速度规划、多轴运动
定位控制、脉冲电源放电参数实时修改、放电状态实时检测、伺服加工轴控制等。基
于这些功能,所设计实现的电火花小孔加工硬件平台需可靠稳定,接口丰富,实现人
机交互与机床外部设备的连接,并行运算快速可靠,实现多设备介质间的有效通讯。
2)满足系统可移植、实际加工实时稳定、应用灵活等需求
本文使用的机床在电火花加工这类特殊加工场景下,易因脉冲放电的电磁干扰,
在加工过程中扰动剧烈,从而造成故障,导致系统加工实时性能局限,加工精度降低。
因此设计的硬件平台需确保在特殊应用场景下的实时稳定,并且可移植到类似场景下
的加工设备中,拓展功能模块,有效降低开发升级成本。根据脉冲放电电流流向不同,
加工方式分为正极性加工与负极性加工,在不同高端制造领域均有应用,因此设计的
硬件平台需要灵活满足这两种加工方式。为满足各领域对电火花加工精度提升的需要,
在设计的硬件平台上开发视觉检测功能,配备摄像头等图像处理硬件设备资源,多元
化灵活满足电火花加工机床的需求。
3)满足多轴运动的精确控制需求
电火花小孔加工因其独特的加工方式在加工过程中具有复杂性,国内加工设备仍
多使用的是脉冲模拟量控制方式下的多轴控制方案,此种传统控制方案易因电磁干扰
而丢失脉冲,难以实现小孔加工时的精准定位,确保电极的实时跟踪;且在螺旋或曲
线进给路径上排屑困难,易增加加工中系统短路风险,导致加工中断频繁。传统的多
轴控制方式不满足航天航空等高精密高端应用领域对电火花加工质量与精度的需求,
因此,为提高小孔加工质量,本文硬件平台开发面向电火花加工的多轴精确控制系统。
2.2****控制系统硬件平台总体设计
2.2.1****硬件平台结构设计方案
制造业现有的电火花加工硬件平台中的运动控制卡,多使用 PCI 接口或者 ISA 接
口作为与 PC 端的数据通讯接口,通用扩展性局限,维护成本高,且实时性与稳定性有
待提高,难以实现加工数字化管理与机床数控系统实时智能化的发展55。
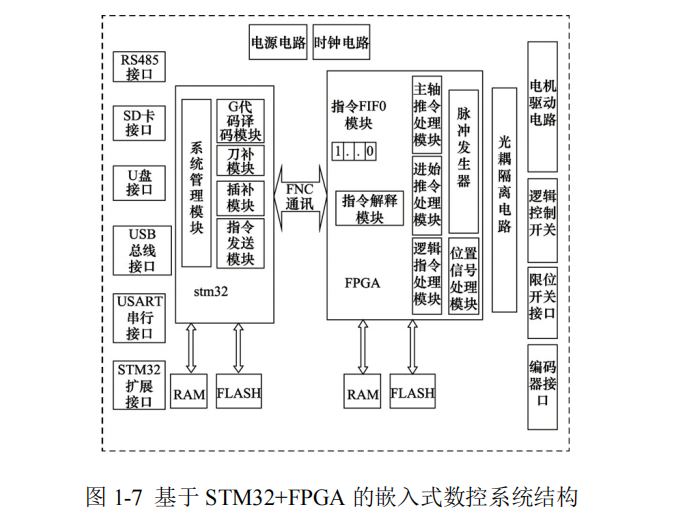
随着集成电路等的发展,基于 ARM 架构的嵌入式数控系统成为高性能的数控开发
平台,相较于传统 PC 机构建的数控系统,嵌入式数控系统在硬件集成度、成本、功耗、
稳定性等方面均有优势。为充分满足不同数控系统的功能需求,通常以 ARM 微处理器
为核心搭配数字信号处理器 DSP、CPLD、FPGA 等芯片,实现高速实时数据处理及接
口处理等方面的功能56-59。目前主流的嵌入式数控系统硬件架构如表 2-2 所示。
考虑到 ARM 处理器的中断资源和外设接口都十分丰富,能够移植嵌入式操作系统,
具备强大的任务调度能力和事务管理能力;DSP 芯片虽然高速浮点计算能力优越,但
在复杂电路的逻辑功能实现及接口扩展方面具有局限性,而 FPGA 芯片的硬件描述语
言 Verilog HDL 虽对开发者有一定要求,但 FPGA 不仅可以高速并行执行任务,引脚资
源丰富,随意调配引脚功能,且与复杂可编程逻辑器件 CPLD 相比设计更灵活,提供
了大量的逻辑单元,集成度更高,可维护性好。因此结合本文电火花小孔加工机床的
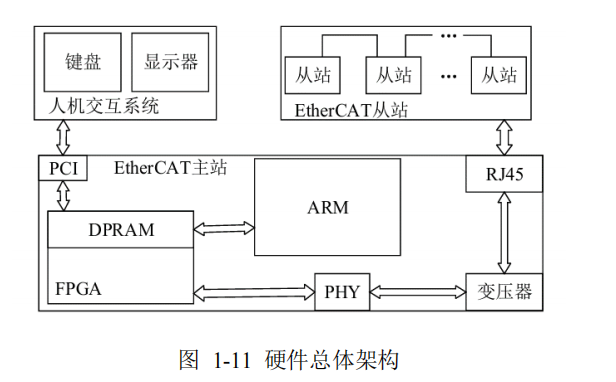
功能需求,搭建以"ARM+FPGA"为核心的"上-下"位机嵌入式数控系统硬件平台,
充分发挥 ARM 主控芯片和 FPGA 主控芯片的各自优势,为降低系统功能耦合性,在程
序开发时均可实现模块化设计。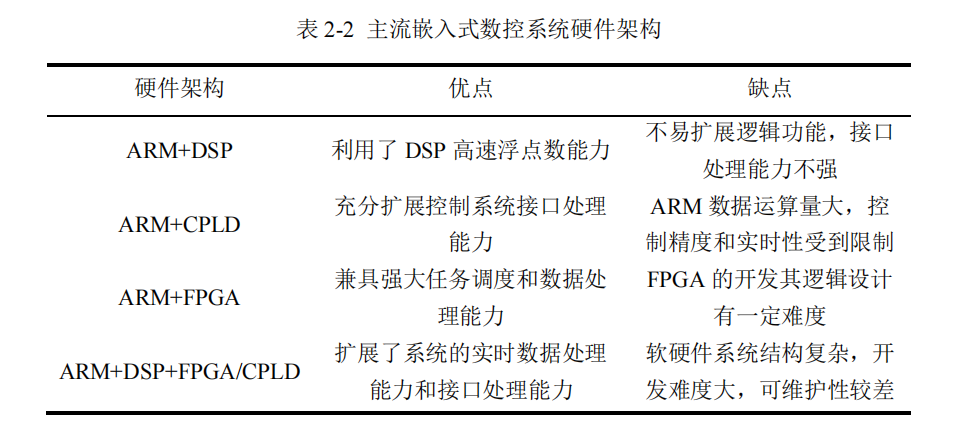
2.2.3****多轴运动控制方案
电火花加工因其独特的放电加工方式在实际加工过程中具有复杂性,对控制系统
的实时性、准确性、响应性有很高要求,目前电火花加工仍多使用的是传统脉冲模拟
量控制方式下的伺服驱动器多轴控制系统,在如今以高端制造为目标的发展趋势下,
已不适用于对加工质量、精度有高要求的电火花加工控制系统。为开发适用于如今电
火花加工的多轴控制系统,提高加工精度,考虑在控制系统中应用性能优越的工业实
时以太网,如表 2-3 所示,为目前多种常见的实时工业以太网协议,其中 EtherCAT 实
时性能优越,具有低成本、简单的网络结构和灵活性等优势,且通讯效率高,通信周
期短,为达到更高的控制精度提供了保障,可满足精密制造领域的控制需求60。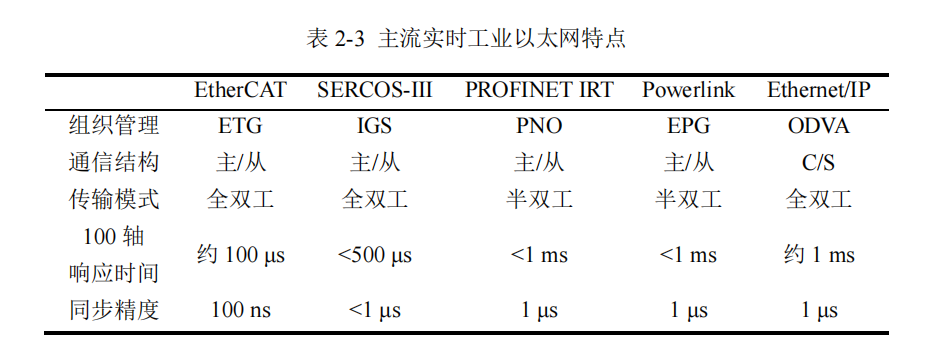
因此,本文选择 EtherCAT 来开发面向电火花加工的多轴运动控制系统,并在嵌入
式电火花小孔加工数控系统"ARM+FPGA"的"上-下位机"体系中,设计适配的
EtherCAT 主站应用方案。目前传统的 EtherCAT 主站设计主要是基于 Windows 或 Linux
操作系统结合商业软件 TwinCAT 或者开源主站框架 IgH/SOEM 实现软主站,基于软件
操作系统构建 EtherCAT,存在一定的实时稳定性局限,不利于移植61-62。
在本文嵌入式数控系统架构中,根据前文上下位机任务分配,下位机可实现与加
工有关外部设备的充分连接与高速控制,因此基于下位机硬件操作平台实现多轴运动
控制,并为充分发挥 FPGA 的高速并行能力及硬件实时性,提出了一种基于 FPGA 搭
配 NEXTW 的 ECM-XF 主站控制芯片来实现 EtherCAT 主站功能的设计方案。该方案设
计的主站完全基于硬件系统实现,硬件实时性能稳定良好,可靠性高,且可移植性强,
可搭配其它类型主控端实现 EtherCAT 主站功能的应用设计。
2.2.4****上下位机通讯方案
电火花小孔加工时,上下位机的通讯主要围绕脉冲电源放电参数、机床多轴位置、
间隙电压等间隙放电状态、水泵设备及限位报警等信息。机床多轴位置信息与间隙电
压等间隙放电状态反馈信息是上下位机之间频繁更新传输的实时性信息,需要实时、
可靠、快速的通讯方式与协议,保障上下位机之间的有效通讯。使用户的操作通过上
位机处理后,可安全快速传递给下位机进行响应。同时,下位机将机床运行时相关加
工状态信息及时反馈给上位机,帮助用户实时跟进机床加工进程。
在工业控制领域,上-下位机常见的通讯方式有 CAN 通讯,RS485 通讯,以太网通
讯,随着工业网络与智能化的发展,基于以太网的上-下位机信息交换成为数控系统中
通讯的首选。因其高速且具备出色的抗电磁干扰能力,能最小化电火花加工时脉冲放
电的恶劣影响,保证系统中指令数据传输的稳定有效,因此本文系统内上、下位机通
讯选用高速抗干扰能力强的以太网 UDP 协议。
UDP 通讯通过对用户数据段进行格式自定义,实现定制化信息的有效收发,如图
2-5 所示。当上位机给下位机发送以太网数据包时,FPGA 端执行数据接收,接收过程
校验无误后,开始接收用户数据,主要分为运动控制信息和脉冲电源参数实时修改信
息,运动控制信息包括轴名称与方向、响应运动距离与速度等;脉冲电源参数消息主
要包括如脉宽、脉停、电流、电容等参数指令与具体数据。下位机响应完成后,向上
位机发送反馈数据,主要包括各个轴的状态信息以及采集到的间隙电压、电流。
2.3****控制系统硬件平台核心器件选型
2.3.1上位机ARM****处理器选型
上位机需执行人机交互、任务调度、插补计算等任务,满足电火花加工机床的实
时性和灵活性等需求,因此在进行上位机主控芯片选型时,需具备以下性能:
1)具有良好的运算能力。为精简结构及提高整体电火花加工硬件平台的可维护性,
本文应用的硬件架构未引入 DSP 芯片,因此选用的 ARM 处理器应具有良好的高速浮
点计算能力,以确保整个系统功能的实时性。
2)可移植 Linux 系统,且开发资料丰富。Linux 操作系统,因功能强大与实时性能
良好,作为本电火花小孔加工平台的首选操作系统。在设计中,厂家开发资料需丰富
完整,可提供开发范例参考,加速电火花加工功能模块的定制开发,帮助企业缩短产
品开发周期,适应小批量、定制化生产趋势。
3)具有丰富的接口与良好的图像处理能力。上位机需要进行人机交互,因此需要
丰富的接口资源,与外部设备如显示器、键盘等进行连接,并根据用户需求,进行其
它外设的拓展;在实际生产制造过程中,为满足高端制造领域内应用需求,可开发视
觉检测,实现小孔加工精确定位。因此所选芯片需具备良好的图像处理能力,便于开
发视觉检测,实现对工件表面的精准定位。
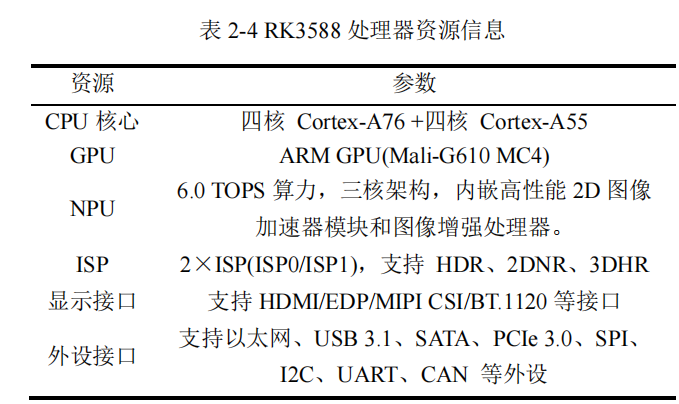
结合上述需求,本架构系统中选用国产瑞芯微 RK3588 芯片,采用多核异构架构,
资源见表 2-4。具有 4 核 Cortex-A76+4 核 Cortex-A55 的八核 CPU 和 Mali-G610 MC4 的
GPU,可充分满足多任务需求;内置高算力及多种功能强大的嵌入式硬件引擎,提供
图像预处理器和后处理器;并具有高性能的 4 通道外部存储器接口,能够支持多种存
储器带宽;整体功耗较低,满足高算力及丰富数据接口需求,易于拓展,具有开源的
开发文档和 Linux 系统开发范例,可有效提高开发效率、缩短开发周期。在 PCB 设计
时需重点关注其高性能、多接口、功耗及适配性等方面。
2.3.2下位机FPGA****芯片选型
下位机硬件平台需实现与加工有关外部设备的充分连接与高速控制。基于此,主
控芯片 FPGA 的选型需具备充足的逻辑单元、优越的高速并行能力,丰富的用户 IO 及
强健的时钟管理能力,且对成本和功耗有较高要求。
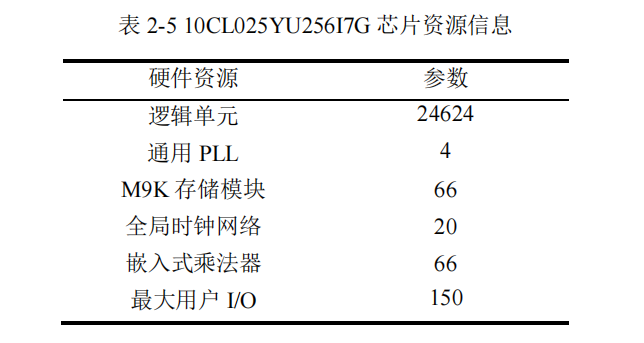
因此选用 Intel(Altera)的 Cyclone 10LP 低成本低功耗系列,根据实际设计资源消耗
预估,选择满足工业级温度范围-40 ℃到 100 ℃的 10CL025YU256I7G。表 2-5 为
10CL025YU256I7G 芯片中的硬件资源。此芯片资源丰富,具有 24624 个基本逻辑单元,
66 个存储模块,存储的容量为 594 Kb,包含 66 个嵌入式乘法器,4 个用于时钟管理的
PLL 通用锁相环,高达 150 个用户 I/O,可充分满足所连接机床的功能要求,并可预留
资源与接口,服务于数控系统的设计移植与性能更新升级。在 FPGA 设计时,
Intel(Altera)提供了 Quartus Prime 开发软件套件,软件内有综合器及多种门级与板级仿
真器,可通过硬件描述语言 Verilog HDL 结合硬件板载的引脚功能配置,实现基于下位
机主控芯片 FPGA 的项目设计开发与仿真验证。
10CL025YU256I7G FPGA 芯片采用 UBGA-256 封装,在设计下位机硬件平台时,
需重点关注高速信号处理和时序的严格控制。PCB 设计时,需保证信号完整性,关注
高速信号的传输线效应、阻抗匹配等设计要点,针对电火花放电加工下高速信号易产
生串扰等问题,采取合适的屏蔽和滤波措施。
信迈提供ARM+FPGA设计与生产服务。
基于RK3588 ARM+FPGA电火花数控机床控制系统设计,兼顾ethercat软硬件实时
XMAIPC_Robot2026-05-31 9:33
相关推荐
HyperAI超神经8 小时前
15亿参数挑战机器人控制,MiniCPM-RobotManip正式开源;覆盖文本/图/视频/动作序列,英伟达发布全模态模型Cosmos3-Edge泡沫冰@8 小时前
ECS 的介绍和使用搞科研的小刘选手8 小时前
【国际生态学协会主办】2026年生态环境与人工智能国际学术会议(ICAIEE 2026)笨鸟先飞,勤能补拙8 小时前
AI 赋能网络安全领域深度剖析小鸟你好啊8 小时前
搭建基于 Solon AI 的 Streamable MCP 服务并部署至阿里云百炼Summer-Bright8 小时前
深度 | Agent框架大洗牌:AutoGen退场后的新秩序ThsPool8 小时前
【遥感学习整理 02】ENVI遥感图像处理基础:从数据读取到遥感信息产品非凸科技9 小时前
非凸智能APP姜太小白9 小时前
【Linux】df -h 卡住问题的通用排查与解决方案总结土星云SaturnCloud9 小时前
抽水蓄能设备智慧运营:基于土星云边缘计算实现机组全生命周期预测性维护