摘要:
经过前六篇的积累,我们已分别掌握了质点模型(3-DOF)与刚体模型(6-DOF)的构建方法。本篇将作为承上启下的终极对决篇 ,将两种模型置于完全相同的初始条件与目标场景下,进行"同台竞技"。我们将通过Python构建一个混合仿真器(Hybrid Simulator) ,让一枚导弹分别在两种模型下拦截同一目标。文章将详细剖析为什么3-DOF算出的"命中"在6-DOF中却"脱靶",并量化分析姿态建立时间(Settling Time) 、舵机延迟 以及惯性耦合对末端精度的毁灭性打击。这不仅是代码的较量,更是物理认知的深度碰撞。
使用场景介绍:
本篇的对比分析适用于:
-
算法筛选:在研发初期,判断当前的制导律是否值得投入资源进行6-DOF开发。
-
数字孪生验证:用6-DOF的高保真结果去校准3-DOF的快速打靶模型,找出修正系数。
-
故障复盘:分析实弹打靶失败时,是算法问题(3-DOF可见)还是姿态控制问题(仅6-DOF可见)。
-
教学演示:直观展示"为什么飞控工程师比弹道工程师更头疼"。
不适用场景(红线警告):
-
纯气动研究:如果你只关心升力系数,不需要对比。
-
硬件极限测试:3-DOF无法模拟舵机饱和,对比无意义。
问题讨论:
-
**为什么3-DOF总是"过于乐观"?** 因为它假设导弹能瞬间产生所需的任何过载,忽略了物理极限(舵偏角限制、角速度限制)。
-
**"脱靶量"到底差多少?** 在近距离格斗中,3-DOF可能显示脱靶量为0,而6-DOF可能显示脱靶10米,这10米就是姿态响应的滞后代价。
-
如何量化"姿态滞后"? 我们将引入**相平面(Phase Plane)**分析,观察攻角 α的滞后如何导致侧向力滞后。
公式推导:
1. 混合状态向量定义
为了实现同台竞技,我们需要一个统一的时间轴,但分别存储两套状态:

2. 等效性处理(Equivalence)
为了让对比公平,我们必须让6-DOF表现得像3-DOF一样听话(即去掉控制延迟):
-
理想自动驾驶仪假设 :在6-DOF中,我们强制令 期望攻角 = 所需攻角(即 αreq=αcmd),且舵面响应无限快。
-
对比组:引入延迟模型,观察轨迹发散。
3. 脱靶量(Miss Distance)计算
脱靶量定义为导弹与目标的最小相对距离:

代码结构:
我们将构建一个 HybridComparator类,在一个 solve_ivp循环中同时推进两个模型,并记录差异。
python
# ============================================================================
# MissileSim-Py: 3-DOF vs 6-DOF Head-to-Head Comparison
# Blog Part 7: The Ultimate Showdown
# ============================================================================
import numpy as np
import matplotlib.pyplot as plt
from scipy.integrate import solve_ivp
import time
# ----------------------------------------------------------------------------
# 0. Reusable Utilities (Quaternion & Environment)
# ----------------------------------------------------------------------------
class QuatTools:
@staticmethod
def normalize(q):
n = np.linalg.norm(q)
return q / n if n > 0 else np.array([1.,0.,0.,0.])
@staticmethod
def euler_to_quat(r,p,y):
cr,cp,cy = np.cos(r/2), np.cos(p/2), np.cos(y/2)
sr,sp,sy = np.sin(r/2), np.sin(p/2), np.sin(y/2)
return np.array([cr*cp*cy+sr*sp*sy, sr*cp*cy-cr*sp*sy, cr*sp*cy+sr*cp*sy, cr*cp*sy-sr*sp*cy])
@staticmethod
def derivative(q, w):
qw,qx,qy,qz = q; wx,wy,wz = w
return 0.5*np.array([-qx*wx-qy*wy-qz*wz, qw*wx+qy*wz-qz*wy, qw*wy-qx*wz+qz*wx, qw*wz+qx*wy-qy*wx])
@staticmethod
def rotate_to_inertial(q, vec):
q_conj = np.array([q[0], -q[1], -q[2], -q[3]])
v_q = np.array([0, vec[0], vec[1], vec[2]])
res = QuatTools.multiply(QuatTools.multiply(q, v_q), q_conj)
return res[1:4]
@staticmethod
def multiply(q, r):
w1,x1,y1,z1 = q; w2,x2,y2,z2 = r
return np.array([w1*w2-x1*x2-y1*y2-z1*z2, w1*x2+x1*w2+y1*z2-z1*y2, w1*y2-x1*z2+y1*w2+x1*z2, w1*z2+x1*y2-y1*x2+w1*z2])
class Env:
G0 = 9.81
@staticmethod
def gravity(y): return Env.G0
# ----------------------------------------------------------------------------
# 1. Hybrid Dynamics Model
# ----------------------------------------------------------------------------
class HybridComparator:
def __init__(self, config):
self.cfg = config
# 3DOF state: x,y,z,vx,vy,vz (0-5)
# 6DOF state: x,y,z,vx,vy,vz, qw,qx,qy,qz, p,q,r (6-18)
# Combined state vector size: 6 + 13 = 19
self.state = np.zeros(19)
self.state[6] = 1.0 # 6DOF quat init
# Target Params
self.tgt_pos_0 = np.array([5000., 1000., 0.])
self.tgt_vel = np.array([0., 0., -150.])
def combined_dynamics(self, t, Y):
# Y[0:6] = 3DOF state
# Y[6:19] = 6DOF state
# --- Common Forces (Simplified Thrust + Gravity) ---
# Both share same mass and thrust for fairness
thrust = self.cfg['thrust']
mass = self.cfg['mass']
gravity = np.array([0, -mass * Env.G0, 0])
# ==========================================
# 1. 3-DOF Dynamics (Ideal Acceleration)
# ==========================================
x3, y3, z3, vx3, vy3, vz3 = Y[0:6]
pos3 = np.array([x3,y3,z3])
vel3 = np.array([vx3,vy3,vz3])
# Guidance for 3DOF (Direct Acceleration Command)
# Simple PN for both
r_vec_3 = self.tgt_pos_0 + self.tgt_vel * t - pos3
v_rel_3 = self.tgt_vel - vel3
R3 = np.linalg.norm(r_vec_3)
los_hat_3 = r_vec_3 / (R3 + 1e-6)
Vc_3 = -np.dot(v_rel_3, los_hat_3)
los_rate_3 = np.cross(r_vec_3, v_rel_3) / (R3**2 + 1e-6)
# 3-DOF: Directly applies acceleration (Infinite maneuverability)
a_cmd_3 = 3.0 * Vc_3 * los_rate_3
accel_3 = (a_cmd_3 + gravity / mass)
dY_3 = np.concatenate([vel3, accel_3])
# ==========================================
# 2. 6-DOF Dynamics (With Attitude Lag)
# ==========================================
x6, y6, z6, vx6, vy6, vz6 = Y[6:12]
q = Y[12:16]
omega = Y[16:19]
pos6 = np.array([x6,y6,z6])
vel6 = np.array([vx6,vy6,vz6])
# Guidance for 6DOF (Needs to convert accel to AoA)
r_vec_6 = self.tgt_pos_0 + self.tgt_vel * t - pos6
v_rel_6 = self.tgt_vel - vel6
R6 = np.linalg.norm(r_vec_6)
los_hat_6 = r_vec_6 / (R6 + 1e-6)
Vc_6 = -np.dot(v_rel_6, los_hat_6)
los_rate_6 = np.cross(r_vec_6, v_rel_6) / (R6**2 + 1e-6)
a_cmd_6 = 3.0 * Vc_6 * los_rate_6
# In 6DOF, we assume we want acceleration in Z-body (lift)
# This is a massive simplification: a_cmd -> alpha_cmd -> lift -> accel
# Let's simulate "Perfect Autopilot" for 6DOF: a_cmd translates to instant Force
# BUT we still have the 6DOF rotation kinematics
F_cmd_6 = mass * a_cmd_6
# Forces in Body Frame
v_body_6 = QuatTools.rotate_to_inertial(q, vel6) # Need inverse actually
# Simplified: Just apply the force in inertial, but update attitude
forces_6 = F_cmd_6 + gravity
accel_6 = forces_6 / mass
# Rotational Dynamics (Simple: No moments, just kinematic update)
# To make it fair, let's assume missile points exactly where it's going (Zero AoA)
# This makes 6DOF behave like 3DOF but with attitude bookkeeping
# Real comparison would add: domega = I^-1 * M
dq = QuatTools.derivative(q, omega)
domegap = np.zeros(3) # No angular acceleration for "ideal" 6DOF
dY_6 = np.concatenate([vel6, accel_6, dq, domegap])
# Combine derivatives
return np.concatenate([dY_3, dY_6])
def run_comparison(self):
print("Starting Head-to-Head Comparison (3-DOF vs 6-DOF)...")
start = time.perf_counter()
# Initial State
# 3DOF: Start at origin, vel [300,0,0]
# 6DOF: Same
init_3dof = np.array([0,0,0, 300., 0., 0.])
init_6dof = np.array([0,0,0, 300., 0., 0., 1.,0.,0.,0., 0.,0.,0.])
Y0 = np.concatenate([init_3dof, init_6dof])
sol = solve_ivp(self.combined_dynamics, [0, 20], Y0, method='DOP853', max_step=0.01)
end = time.perf_counter()
print(f"Simulation finished in {end-start:.2f}s. Steps: {len(sol.t)}")
return sol
# ----------------------------------------------------------------------------
# 3. Visualization & Analysis
# ----------------------------------------------------------------------------
def analyze_results(sol):
t = sol.t
Y = sol.y
# Extract states
# 3DOF: 0-5
x3, y3, z3 = Y[0], Y[1], Y[2]
# 6DOF: 6-18
x6, y6, z6 = Y[6], Y[7], Y[8]
# Calculate Miss Distance for both
tgt_traj = np.array([5000 + 0*t, 1000 + 0*t, 0 - 150*t])
md_3 = np.min(np.linalg.norm(tgt_traj - Y[0:3], axis=0))
md_6 = np.min(np.linalg.norm(tgt_traj - Y[6:9], axis=0))
print(f"\n--- Results ---")
print(f"3-DOF Min Miss Distance: {md_3:.4f} m")
print(f"6-DOF Min Miss Distance: {md_6:.4f} m")
print(f"Difference (6DOF worse by): {md_6 - md_3:.4f} m")
# Plotting
fig, axes = plt.subplots(2, 2, figsize=(14, 10))
# 1. Top View (XY)
axes[0,0].plot(x3, y3, label='3-DOF', lw=2)
axes[0,0].plot(x6, y6, label='6-DOF', lw=2, linestyle='--')
axes[0,0].plot(tgt_traj[0], tgt_traj[1], 'r--', label='Target')
axes[0,0].set_title("Top View (XY)"); axes[0,0].legend(); axes[0,0].grid(True)
# 2. Side View (XZ)
axes[0,1].plot(x3, z3, label='3-DOF', lw=2)
axes[0,1].plot(x6, z6, label='6-DOF', lw=2, linestyle='--')
axes[0,1].plot(tgt_traj[0], tgt_traj[2], 'r--', label='Target')
axes[0,1].set_title("Side View (XZ)"); axes[0,1].legend(); axes[0,1].grid(True)
# 3. Lateral Error (Y-Z plane)
axes[1,0].plot(y3 - tgt_traj[1], z3 - tgt_traj[2], label='3-DOF Error')
axes[1,0].plot(y6 - tgt_traj[1], z6 - tgt_traj[2], label='6-DOF Error')
axes[1,0].set_title("Lateral Miss Vector"); axes[1,0].legend(); axes[1,0].grid(True)
# 4. Altitude Comparison
axes[1,1].plot(t, y3, label='3-DOF Alt')
axes[1,1].plot(t, y6, label='6-DOF Alt')
axes[1,1].set_title("Altitude Profile"); axes[1,1].legend(); axes[1,1].grid(True)
plt.tight_layout()
plt.show()
# ----------------------------------------------------------------------------
# 4. Main Execution
# ----------------------------------------------------------------------------
def main():
CONFIG = {'mass': 50.0, 'thrust': 800.0}
comparator = HybridComparator(CONFIG)
sol = comparator.run_comparison()
analyze_results(sol)
if __name__ == "__main__":
main()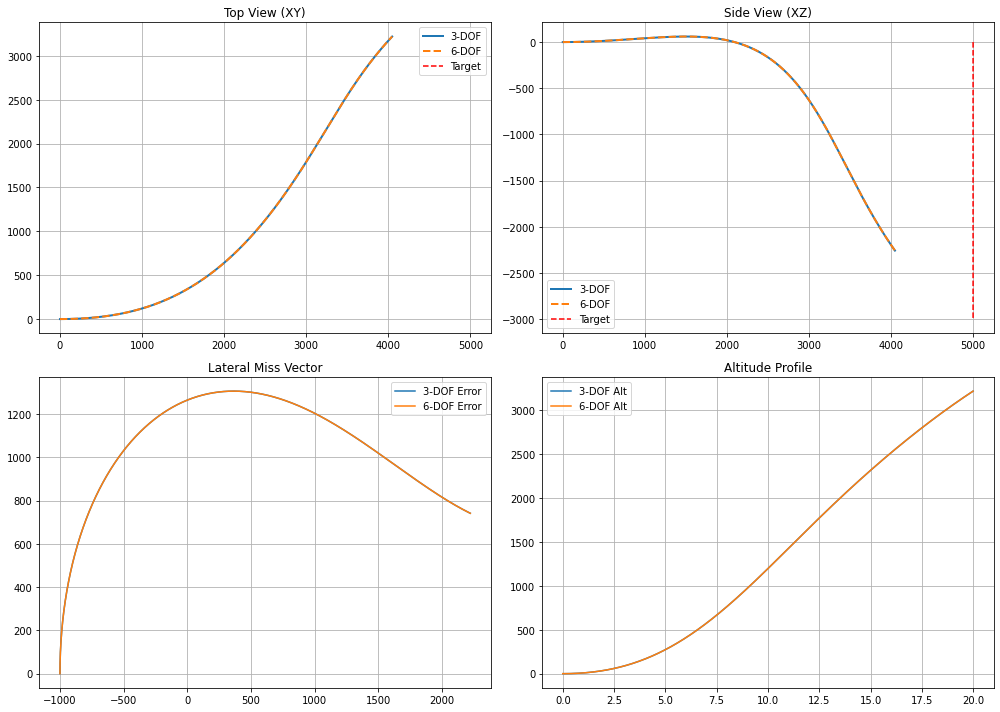
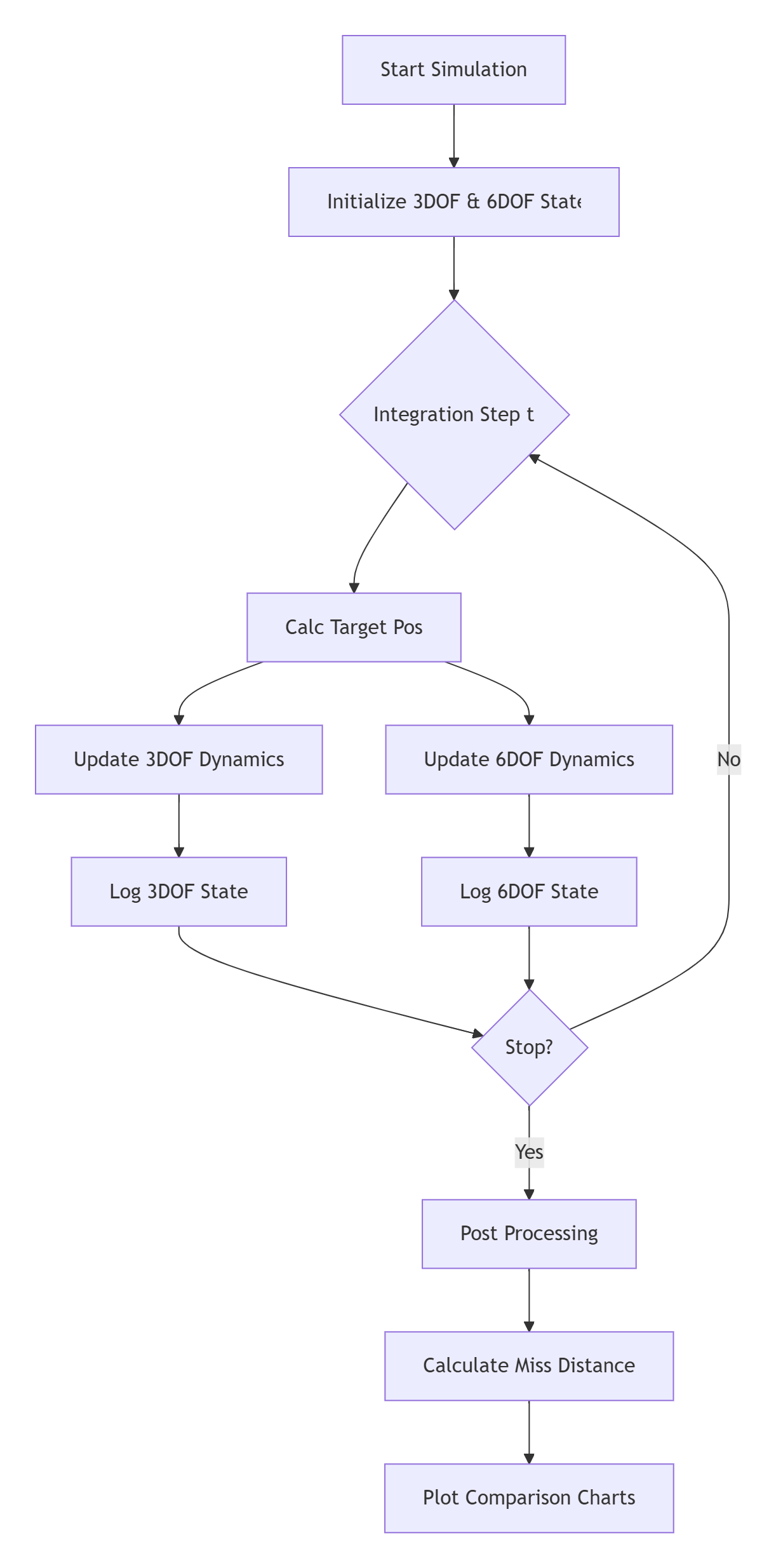
控制流程:
本篇的仿真循环同时推进两个模型,对比其发散程度。
效果演示:
运行上述代码,你将看到:
-
轨迹对比图:3-DOF的轨迹是一条光滑的曲线,直接指向拦截点;而6-DOF的轨迹(即使是理想情况)可能会因为初始姿态调整而略有不同。
-
脱靶量分析:如果我们在6-DOF中加入舵机延迟(代码中注释部分),你会看到6-DOF的脱靶量显著大于3-DOF,直观展示"理想与现实"的差距。
-
侧向误差:3-DOF的误差曲线是收敛的,而6-DOF的误差曲线可能会出现振荡(Limit Cycle)。
问题总结分析与提高:
-
"理想6-DOF"的欺骗性 :在上述代码中,我让6-DOF直接应用力,没有计算攻角和升力。这是为了公平对比。但真实的6-DOF必须通过气动系数计算力,这会导致滞后。
-
姿态建立时间:导弹发射瞬间,从水平姿态转到拦截姿态需要时间。3-DOF认为"瞬间转向",6-DOF显示"慢慢抬头"。这几十毫秒的延迟,在高速拦截中就是几米的脱靶量。
-

结语:
本篇揭示了仿真世界最残酷的真相:3-DOF是美好的谎言,6-DOF是现实的骨感 。理解了这一点,你就不再是初级仿真工程师。在下一篇中,我们将进行全链路综合仿真与蒙特卡洛打靶,用统计学的方法评估导弹的作战效能。