Nav2 行为树(Behavior Tree)技术详解
摘要
Nav2(Navigation 2)是ROS 2生态中生产级的移动机器人导航框架,其最显著的设计变革在于采用行为树(Behavior Tree, BT) 作为导航任务的核心编排机制。行为树替代了ROS 1 Navigation中硬编码的状态机,将路径规划、运动控制、故障恢复等独立功能模块以插件化节点的形式灵活组合,实现如"搭乐高积木"般的导航行为定制。本文系统讲解行为树在Nav2架构中的定位、四类核心节点的功能与实现原理、XML构建语法、典型导航场景的树结构分析,以及自定义行为树节点的开发方法。
1. 行为树在Nav2架构中的定位与作用
1.1 整体架构概述
Nav2采用模块化服务器架构,将导航功能拆分为多个独立的ROS 2生命周期节点(Lifecycle Node),通过行为树统一编排与调度。核心架构可分为"一大三小"四个服务器:
- BT Navigator Server(行为树导航服务器) :高层协调层,负责加载并执行XML定义的行为树,调度下层各功能模块。它本身是一个ROS 2 Action Server,对外暴露
NavigateToPose、NavigateThroughPoses等导航接口。 - Planner Server(规划服务器):响应行为树节点的请求,计算全局路径。支持多种规划器插件(如Smac、Theta*、NavFn)的动态切换。
- Controller Server(控制服务器):执行局部路径跟踪(ROS 1中称为局部规划器),输出速度指令驱动机器人沿全局路径运动。支持DWB、RPP、TEB等多种控制器插件。
- Behavior Server(行为/恢复服务器):管理故障恢复行为(如原地旋转Spin、后退BackUp、等待Wait等),在导航异常时接管控制以帮助机器人脱困。
此外,Nav2还包含Smoother Server (路径平滑器,优化路径的光滑性与运动学可行性)和Waypoint Follower(路点跟随器)等辅助服务器,均可通过行为树节点调用。
图1展示了Nav2的整体架构,清晰体现了行为树与各功能模块/服务器之间的交互关系:
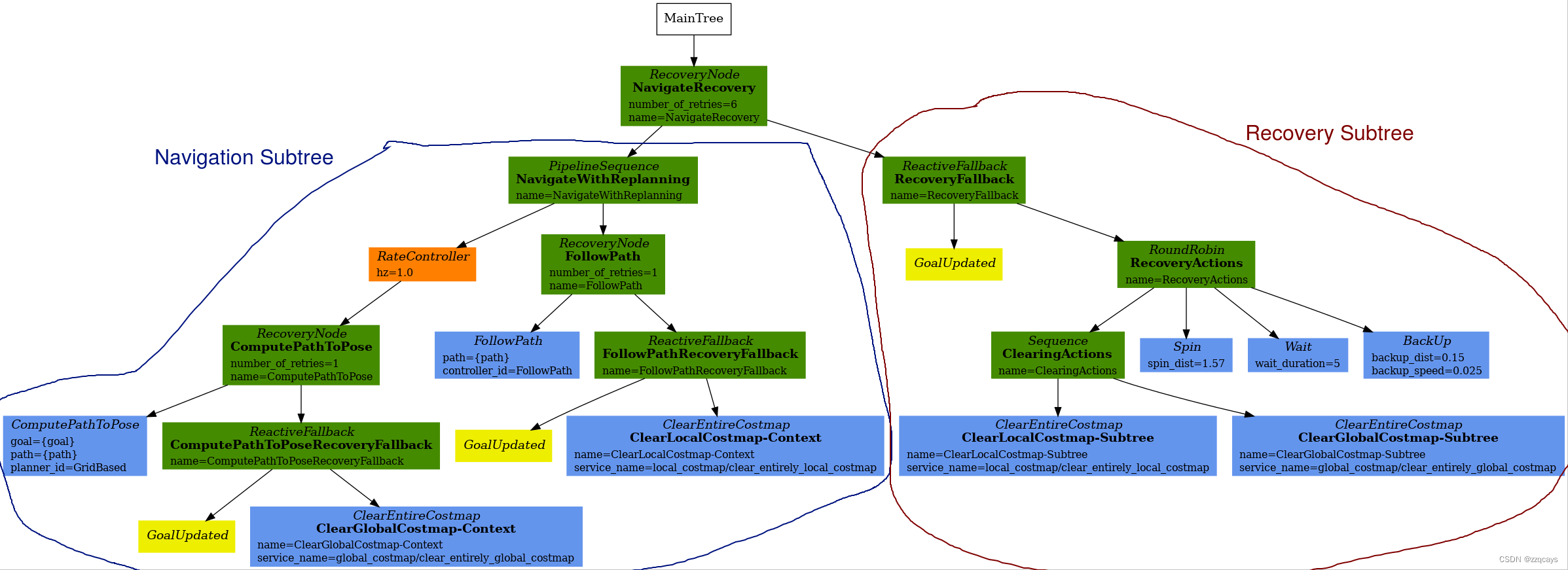
图1 Nav2架构概览
1.2 行为树作为导航大脑
行为树在Nav2中扮演决策与任务编排的核心引擎 角色。Nav2使用基于 BehaviorTree.CPP v3/v4 开源库的 BehaviorTreeEngine 作为运行时执行环境,该引擎读取XML格式的行为树描述文件,动态加载并实例化BT节点插件,按树结构的层级逻辑执行导航任务。
行为树的运行机制是:每个节点执行后向其父节点返回三种状态之一------SUCCESS(成功)、FAILURE(失败)或 RUNNING(执行中)。父节点根据子节点的返回状态和自身类型(序列、回退、并行等)决定下一步执行哪个子节点。这一"tick"驱动的执行模型使复杂导航行为的切换逻辑清晰可预测。
行为树替代了ROS 1 Navigation中耦合严重的状态机实现,带来了以下关键优势:
- 模块化与可组合性:各功能单元(规划、控制、恢复等)作为独立的BT节点插件存在,可通过XML自由组合,修改导航行为无需改动C++源码。
- 高度可重构性:用户可在行为树、核心算法、状态检查器等多个层面选择或替换插件,实现针对特定机器人平台与应用场景的定制导航逻辑。
- 清晰的故障处理语义 :通过
RecoveryNode、ReactiveFallback、RoundRobin等控制节点,故障恢复逻辑可分层、分上下文地嵌入行为树。 - 运行时可视化与调试:行为树执行状态可通过Groot2工具实时监控,方便开发与调试。
2. 核心节点类型详解
Nav2行为树中的节点是构成导航逻辑的基本单元。每个节点在行为树中被"tick"(时钟驱动调用)时,执行其功能并向父节点返回状态。Nav2沿用了BehaviorTree.CPP的四类标准节点分类,并在此基础上扩展了大量导航专用的自定义节点。
根据Nav2的插件注册表统计,nav2_behavior_tree 包提供了80余个预置BT节点,涵盖:Action节点(50+) 、Condition节点(17个) 、Control节点(5个) 和 Decorator节点(7个)。本节按功能类别进行详细说明。
2.1 Action节点(Action Nodes)
概念与特征 :Action节点执行需要一定时间完成的操作,如调用ROS 2 Action Server进行路径规划或路径跟踪。其特征为:执行过程中返回 RUNNING,完成后返回 SUCCESS 或 FAILURE;可与ROS 2 Action Server、Service Server或同步逻辑交互;支持执行过程中的取消(halt)操作。
实现原理 :Nav2中的大部分Action节点继承自 nav2_behavior_tree::BtActionNode<T> 模板类,该模板封装了ROS 2 Action Client的完整生命周期------发送Goal、监控状态、处理结果/取消/中止等。开发者只需覆写 on_tick()、on_success() 等虚函数即可实现特定逻辑。
核心导航Action节点一览:
| 节点名称 | 功能描述 | 关键输入端口 | 关键输出端口 | 备注 |
|---|---|---|---|---|
ComputePathToPose |
调用Planner Server计算到目标点的路径 | goal(目标位姿), planner_id(规划器ID) |
path(计算出的路径), error_code_id(错误码) |
最重要的规划节点之一 |
ComputePathThroughPoses |
计算通过多个中间路点的路径 | goals(路点列表), planner_id |
path, error_code_id |
用于多路点导航 |
FollowPath |
调用Controller Server按路径控制机器人运动 | path(路径), controller_id(控制器ID) |
error_code_id |
跟踪执行节点 |
SmoothPath |
调用Smoother Server优化路径的光滑性与运动学可行性 | unsmoothed_path, smoother_id |
smoothed_path, was_completed |
可选但推荐 |
Spin |
原地旋转指定角度 | spin_dist(旋转弧度) |
--- | 常用恢复动作 |
BackUp |
后退指定距离 | backup_dist, backup_speed |
--- | 常用恢复动作 |
Wait |
等待指定时间 | wait_duration(秒) |
--- | 时间触发等待 |
DriveOnHeading |
沿指定方向直线行驶 | dist_to_travel, speed, time_allowance |
--- | 特殊恢复动作 |
NavigateToPose |
递归调用子行为树导航到单个目标点 | goal, behavior_tree |
error_code_id |
用于嵌套子BT |
NavigateThroughPoses |
递归调用子行为树导航通过多个路点 | goals, behavior_tree |
error_code_id |
用于嵌套子BT |
ComputeRoute |
调用Route Server在预定义导航图上计算路线 | start_id, goal_id, use_poses |
path, route, planning_time |
基于图导航 |
ClearEntireCostmap |
清除全部代价地图 | service_name |
--- | 实际为服务调用节点 |
关键参数说明 (以 ComputePathToPose 为例):
goal(输入端口):接收目标位姿(geometry_msgs/PoseStamped),通常从行为树黑板(Blackboard)的"{goal}"变量获取。planner_id(输入端口):指定要使用的规划器插件ID,如"GridBased"对应Smac规划器。path(输出端口):规划成功后,将生成的nav_msgs/Path写入黑板,供后续的FollowPath节点使用。error_code_id(输出端口):规划失败时输出错误码,可用于驱动恢复行为的选择。
2.2 Condition节点(Condition Nodes)
概念与特征 :Condition节点对系统状态进行检查并立即返回 SUCCESS 或 FAILURE。它从不返回 RUNNING,执行应该是瞬时、计算量小的。Condition节点不改变系统状态(无副作用),仅用于行为树中的决策分支。
实现原理 :Condition节点继承自 BT::ConditionNode 基类,在其 tick() 虚函数中实现同步的检查逻辑。Nav2共内置17个Condition节点,常见如下:
| 节点名称 | 检查内容 | 典型用途 |
|---|---|---|
GoalReached |
检查机器人是否已到达目标位姿(位置与角度容差内) | 判断导航是否完成 |
GoalUpdated |
检查导航目标是否已被新目标替代 | 抢占当前行为以响应新目标 |
IsStuck |
检测机器人是否被卡住(速度低于阈值持续一定时间) | 触发恢复行为 |
IsBatteryLow |
检查电池电量是否低于阈值 | 触发充电/对接行为树 |
IsPathValid |
检查已规划路径是否碰撞自由 | 判断是否需要重新规划 |
TransformAvailable |
检查所需TF变换是否可用 | 流程前置检查 |
InitialPoseReceived |
检查是否已收到初始位姿估计 | 导航启动条件 |
TimeExpired |
检查指定时间是否已过 | 超时判断 |
DistanceTraveled |
检查已行驶距离是否达到阈值 | 里程触发条件 |
典型用法 :Condition节点常与 ReactiveFallback 控制节点配对使用,实现"条件发生时中断当前行为"的响应式模式。例如,在恢复过程中实时检查 GoalUpdated------一旦外部发送了新目标,立即中断当前恢复动作并返回 SUCCESS,让主导航子树重新执行,从而实现对新目标的高响应性。
2.3 Control节点(Control Nodes)
概念与特征 :Control节点拥有1至N个子节点,其职责是决定子节点的执行顺序和调度策略。Control节点本身不执行具体任务,而是通过子节点返回的状态驱动逻辑流转。
Nav2在BehaviorTree.CPP标准控制节点(Sequence、Fallback、Parallel)基础上,扩展了5种导航专用控制节点:
(1) PipelineSequence(管道序列)
行为语义 :类似于标准 Sequence,从左到右顺序执行子节点,任一子节点返回 FAILURE 则立即终止并返回 FAILURE。关键差异在于:当子节点返回 RUNNING 时,PipelineSequence 会持续重新tick该子节点 ,而非跳过。这一特性特别适合"规划→控制"流水线------当 FollowPath 正在执行时,PipelineSequence 会持续tick前序的 ComputePathToPose(若被装饰器触发重规划),实现路径的动态重规划 与无缝切换。
xml
<PipelineSequence name="NavigateWithReplanning">
<RateController hz="1.0">
<RecoveryNode number_of_retries="1" name="ComputePathToPose">
<ComputePathToPose goal="{goal}" path="{path}" planner_id="GridBased"/>
<!-- 规划失败时的上下文恢复 -->
<ClearEntireCostmap service_name="global_costmap/clear_entirely_global_costmap"/>
</RecoveryNode>
</RateController>
<RecoveryNode number_of_retries="1" name="FollowPath">
<FollowPath path="{path}" controller_id="FollowPath"/>
<ClearEntireCostmap service_name="local_costmap/clear_entirely_local_costmap"/>
</RecoveryNode>
</PipelineSequence>(2) RecoveryNode(恢复节点)
行为语义 :RecoveryNode 拥有两个子节点,第一个为主任务节点 ,第二个为恢复动作节点 (可包含子树)。当第一个子节点返回 FAILURE 时,执行第二个子节点(恢复),之后重试第一个子节点。通过 number_of_retries 参数控制最大重试次数。若恢复子节点也返回 FAILURE 或重试次数耗尽,则返回 FAILURE。
xml
<RecoveryNode number_of_retries="6" name="NavigateRecovery">
<!-- 主导航子树 -->
<PipelineSequence name="NavigateWithReplanning"> ... </PipelineSequence>
<!-- 系统级恢复子树 -->
<ReactiveFallback name="RecoveryFallback"> ... </ReactiveFallback>
</RecoveryNode>参数 :number_of_retries --- 最大重试次数(整型)。
(3) RoundRobin(轮转选择)
行为语义 :依次tick子节点,若当前子节点返回 FAILURE 则切换到下一个子节点;若返回 RUNNING 则维持当前节点并返回 RUNNING。仅当所有子节点均返回 FAILURE 时,RoundRobin 才返回 FAILURE。在Nav2中,RoundRobin常用于系统级恢复序列------轮流尝试不同的恢复策略(如清理代价地图 → 原地旋转 → 等待 → 后退),只要任意一种恢复成功即退出:
xml
<RoundRobin name="RecoveryActions">
<Sequence name="ClearingActions">
<ClearEntireCostmap service_name="local_costmap/clear_entirely_local_costmap"/>
<ClearEntireCostmap service_name="global_costmap/clear_entirely_global_costmap"/>
</Sequence>
<Spin spin_dist="1.57"/>
<Wait wait_duration="5"/>
<BackUp backup_dist="0.15" backup_speed="0.025"/>
</RoundRobin>(4) ReactiveFallback(响应式回退)
行为语义 :是Nav2中最具特色的控制节点之一。类似于标准的 Fallback 节点(顺序执行子节点直到某个返回 SUCCESS),但增加了一个关键特性:当第一个子节点返回 RUNNING 时,ReactiveFallback 会持续异步tick后续的条件子节点 。若后续条件节点返回 SUCCESS,则立即中止第一个子节点并返回 SUCCESS。
这一特性专门用于实现"响应式中断"模式。例如,在恢复子树中嵌套 ReactiveFallback + GoalUpdated 条件,使恢复过程能随时被新导航目标中断,无需等待当前恢复动作完成。
(5) 其他Nav2控制节点
- NonblockingSequence:非阻塞序列,在当前子节点返回 RUNNING 时仍继续tick后续节点,用于并发控制场景。
- PersistentSequence:持久序列,记录各子节点的完成状态以支持跨tick的进度记忆。
2.4 Decorator节点(装饰器节点)
概念与特征 :Decorator节点只有一个子节点,其职责是修改该子节点的行为或返回值------如控制调用频率、转换返回值、重试逻辑等。Nav2内置7个装饰器节点,其中最核心的有以下三个:
(1) RateController(频率控制器)
控制子节点的最大tick频率(Hz)。在导航行为树中,常用来限制 ComputePathToPose 的重规划频率:
xml
<RateController hz="1.0">
<ComputePathToPose goal="{goal}" path="{path}" planner_id="GridBased"/>
</RateController>参数 :hz --- 最大tick频率(Hz,double类型),上例中限制为每秒最多1次重规划。
(2) DistanceController(距离控制器)
当机器人移动的累计距离超过指定阈值时,才允许重新tick子节点。适用于控制路径重规划的触发距离:
xml
<DistanceController distance="1.0">
<ComputePathToPose goal="{goal}" path="{path}"/>
</DistanceController>参数 :distance --- 触发距离阈值(米,double类型),上例中为每行驶1.0米触发一次重规划。
(3) SpeedController(速度控制器)
与DistanceController类似,但以机器人的实时速度作为子节点tick的触发条件,仅在速度超过(或低于)阈值时激活子节点。
(4) GoalUpdater(目标更新器)
每次tick时检查黑板中的 goal 是否已更新。若有新目标则返回 SUCCESS,常用于在子树的入口处检测目标变更,驱动响应式行为切换。
Parameterizable Action Node :另有一种特殊的Decorator模式,允许在XML中通过 param 属性动态传入参数,修改子Action节点的运行时配置。
3. 行为树的构建流程与XML语法规则
3.1 行为树的XML结构基础
Nav2行为树使用XML格式描述树结构。一个完整的BT XML文件遵循以下基本骨架:
xml
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<!-- 行为树节点层级结构 -->
</BehaviorTree>
</root>核心元素说明:
<root>:根标签,main_tree_to_execute属性指定要执行的子树ID。<BehaviorTree ID="...">:定义一个(子)行为树,可以包含多个子树定义。BTCPP_format="4":可选属性,指定BehaviorTree.CPP库的版本格式(v4)。
3.2 节点的XML表示与黑板变量
每个BT节点通过XML标签表示,节点类型名(如 ComputePathToPose、FollowPath)对应C++插件注册名,需与工厂注册的名称完全一致:
xml
<ComputePathToPose goal="{goal}" path="{path}" planner_id="GridBased"/>黑板(Blackboard)变量 :{变量名} 语法表示对黑板中存储数据的引用。黑板是行为树节点间共享数据的键值存储,运行时由 BT::Blackboard 管理。常用黑板键包括:
| 黑板键 | 数据类型 | 说明 |
|---|---|---|
goal |
geometry_msgs::msg::PoseStamped |
导航目标位姿 |
path |
nav_msgs::msg::Path |
当前规划的路径 |
goals |
std::vector<PoseStamped> |
多路点导航的目标列表 |
error_code_id |
uint16_t |
错误码标识 |
关键说明:行为树中的"Node"与ROS 2中的"Node"是完全不同的概念。BT Node是行为树执行逻辑的基本单元(通常作为插件动态加载),而ROS 2 Node是分布式系统中通过话题(Topic)、服务(Service)、动作(Action)通信的执行单元。BT中的Action Node也不一定对应ROS 2的Action Server,但Nav2中大多数Action节点确实通过ROS Action接口与独立的功能服务器通信。
3.3 参数配置方式
行为树节点的参数通过XML属性(Attribute) 传递,主要分为三类:
- 输入端口(Input Ports) :定义节点执行所需的输入数据,如
goal="{goal}"从黑板读取目标位姿。 - 输出端口(Output Ports) :定义节点执行后写入黑板的结果数据,如
path="{path}"将计算的路径写入黑板。 - 硬编码常量 :直接写入数字或字符串常量,如
hz="1.0"、planner_id="GridBased"。
每个BT节点的端口定义在C++代码的 providedPorts() 静态方法中声明。例如,Nav2中 FollowPath 的端口定义如下:
cpp
static BT::PortsList providedPorts() {
return {
BT::InputPort<nav_msgs::msg::Path>("path", "Path to follow"),
BT::InputPort<std::string>("controller_id", ""),
};
}3.4 构建一个最小可用的行为树
以下是一个最小但可运行的Nav2导航行为树,它每1米重新规划一次路径并跟踪执行:
xml
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<PipelineSequence name="NavigateWithReplanning">
<DistanceController distance="1.0">
<ComputePathToPose goal="{goal}" path="{path}"/>
</DistanceController>
<FollowPath path="{path}"/>
</PipelineSequence>
</BehaviorTree>
</root>该树虽然功能基本,但不包含任何恢复行为、重试机制、算法选择等高级特性,Nav2官方文档以此强调行为树的可扩展性------所有这些高级功能均可通过添加节点与子树渐进增强。
3.5 行为树的运行时执行流程
BehaviorTreeEngine 的 run() 方法以指定的循环频率(默认10ms)执行行为树。每次循环迭代称为一个"tick周期",引擎从根节点开始,沿着树结构向下递归tick各节点。其执行逻辑如下:
- 从XML文件或字符串加载BT定义,通过
BT::BehaviorTreeFactory注册的节点名称解析为C++插件实例。 - 创建共享黑板实例(
BT::Blackboard),所有节点通过黑板读写共享数据。 - 在每个tick周期中,从根节点开始递推执行。控制节点根据子节点返回的状态决定下一个tick哪个节点。
- 若检测到取消请求(如ROS Action被抢占),执行
haltAllActions()终止所有正在运行的Action节点。 - 最终返回整体执行状态------
SUCCEEDED、FAILED或CANCELED。
3.6 行为树的配置与加载
行为树导航器(bt_navigator)的配置参数如下所示,指定使用的XML文件路径及需加载的BT节点插件库:
yaml
bt_navigator:
ros__parameters:
use_sim_time: False
global_frame: map
robot_base_frame: base_link
odom_topic: /odom
default_bt_xml_filename: "navigate_w_replanning_and_recovery.xml"
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_nodeplugin_lib_names 列出所有需要加载的BT节点插件库。插件以 .so 动态库形式编译,通过 BT_REGISTER_NODES() 宏注册,运行时由 BtNavigator 按需加载。若XML中使用了某节点但未在 plugin_lib_names 中加载其对应库,则运行时会抛出节点未注册异常。
4. 典型导航场景下的行为树示例分析
4.1 Navigate To Pose With Replanning and Recovery(默认主行为树)
这是Nav2最核心的默认行为树 navigate_to_pose_w_replanning_and_recovery.xml,用于实现带有持续重规划和完善故障恢复的单点导航。
核心设计思想:
- 分层恢复架构:行为树采用两级恢复机制------子任务级的上下文恢复(Contextual Recovery)和系统级的全局恢复(System-Level Recovery)。
- 持续重规划 :
RateController以1Hz频率周期性触发ComputePathToPose重新规划全局路径,确保路径对动态环境变化做出响应。 - 6次重试保障 :最外层
RecoveryNode设置number_of_retries="6",为导航系统提供充足的恢复机会。
完整XML结构:
xml
<root main_tree_to_execute="MainTree">
<BehaviorTree ID="MainTree">
<RecoveryNode number_of_retries="6" name="NavigateRecovery">
<!-- ===== 主导航子树 ===== -->
<PipelineSequence name="NavigateWithReplanning">
<RateController hz="1.0">
<RecoveryNode number_of_retries="1" name="ComputePathToPose">
<ComputePathToPose goal="{goal}" path="{path}" planner_id="GridBased"/>
<ReactiveFallback name="ComputePathToPoseRecoveryFallback">
<GoalUpdated/>
<ClearEntireCostmap name="ClearGlobalCostmap-Context"
service_name="global_costmap/clear_entirely_global_costmap"/>
</ReactiveFallback>
</RecoveryNode>
</RateController>
<RecoveryNode number_of_retries="1" name="FollowPath">
<FollowPath path="{path}" controller_id="FollowPath"/>
<ReactiveFallback name="FollowPathRecoveryFallback">
<GoalUpdated/>
<ClearEntireCostmap name="ClearLocalCostmap-Context"
service_name="local_costmap/clear_entirely_local_costmap"/>
</ReactiveFallback>
</RecoveryNode>
</PipelineSequence>
<!-- ===== 系统级恢复子树 ===== -->
<ReactiveFallback name="RecoveryFallback">
<GoalUpdated/>
<RoundRobin name="RecoveryActions">
<Sequence name="ClearingActions">
<ClearEntireCostmap name="ClearLocalCostmap-Subtree"
service_name="local_costmap/clear_entirely_local_costmap"/>
<ClearEntireCostmap name="ClearGlobalCostmap-Subtree"
service_name="global_costmap/clear_entirely_global_costmap"/>
</Sequence>
<Spin spin_dist="1.57"/>
<Wait wait_duration="5"/>
<BackUp backup_dist="0.15" backup_speed="0.025"/>
</RoundRobin>
</ReactiveFallback>
</RecoveryNode>
</BehaviorTree>
</root>(1)最外层
RecoveryNode允许最多6次全局重试;(2)PipelineSequence先执行1Hz重规划(含上下文恢复),再执行路径跟踪(含上下文恢复);(3)若主导航子树失败,进入系统级恢复子树------ReactiveFallback先异步检查GoalUpdated,再通过RoundRobin依次尝试清理代价地图、原地旋转、等待、后退四种策略;(4)任一恢复成功后重新尝试导航。
分层恢复策略的详细解析:
(a) 子任务级上下文恢复 :ComputePathToPose 被其自己的 RecoveryNode 包裹(number_of_retries="1")。若规划失败(如因全局代价地图中有动态障碍阻挡),触发上下文恢复------在 ReactiveFallback 内先检查是否有新目标(GoalUpdated),若无则清除全局代价地图(ClearEntireCostmap),之后重新尝试规划。同理,FollowPath 的上下文恢复清除的是局部代价地图------这体现了上下文感知的恢复策略:规划失败(全局问题)清理全局代价地图,控制失败(局部问题)清理局部代价地图。
(b) 系统级全局恢复 :当上下文恢复无法解决故障(即主导航子树整体返回 FAILURE),行为树进入系统级恢复子树。ReactiveFallback 首先异步检查 GoalUpdated------如果导航目标在恢复过程中被外部更新,立即终止恢复并返回 SUCCESS,使主导航子树以新目标重新执行。否则,RoundRobin 顺序尝试四种恢复策略:先清理两层代价地图,若仍失败则原地旋转1.57弧度(约90°),若仍失败则等待5秒(让动态障碍物通过),最后尝试后退0.15米。
4.2 Navigate To Pose With Consistent Replanning And If Path Becomes Invalid(健壮版导航树)
这是Nav2提供的更成熟版本的行为树 nav_to_pose_with_consistent_replanning_and_if_path_becomes_invalid.xml,除上述默认行为树的功能外,还额外支持以下特性:
- 智能重规划触发:不仅周期性重规划,还可在路径变为无效(碰撞不可行)时立即触发重规划。
- 条件分支优化 :使用 Condition 节点(如
IsPathValid)在不同算法间动态切换,为特定场景选用最合适的规划器或控制器。 - 子树复用:将导航逻辑封装为子树(Subtree),方便在其他行为树中引用复用。
- 选择器节点应用 :支持
PlannerSelector、ControllerSelector、GoalCheckerSelector等节点,允许通过ROS话题动态切换算法。
4.3 基于预定义导航图的导航行为树(Navigate on Route Graph with Recovery)
Nav2还提供了基于导航图(Route Graph) 的行为树,适用于需要在预定义的道路/通道网络上导航的场景(如工厂AGV)。该树的核心区别在于使用 ComputeRoute + ComputePathThroughPoses 替代 ComputePathToPose:
ComputeRoute调用Route Server在图(Graph)上搜索起点到终点的最优路线。- 路线转换为一系列路点(Waypoints)。
ComputePathThroughPoses依次计算各路点间的自由空间路径。FollowPath执行路径跟踪。
这种架构将全局路线规划 与局部路径规划解耦,适合结构化环境中的车规级应用。
5. 自定义行为树节点的开发方法
5.1 开发环境准备
自定义BT节点开发需要满足以下依赖条件:
- ROS 2(Binary或源码安装)
- Nav2及相关依赖(含
nav2_behavior_tree包) - BehaviorTree.CPP v3/v4库
- C++17编译器
自定义节点可以单独创建ROS 2包,无需修改Nav2源码。所有 nav2_behavior_tree 包提供的节点类型均可被外部项目引用和扩展。
5.2 Nav2提供的基础类体系
Nav2为自定义BT节点开发提供了三层基础类体系:
| 基础类 | 用途 | 适用场景 |
|---|---|---|
BtActionNode<ActionT> |
模板类,封装ROS 2 Action Client的完整生命周期 | 自定义与Action Server交互的BT节点 |
BtServiceNode<ServiceT> |
模板类,封装ROS 2 Service Client通信 | 自定义与Service Server交互的BT节点 |
BtCancelActionNode<ActionT> |
模板类,用于取消正在执行的ROS Action | 主动中断导航任务的节点 |
BT::ConditionNode |
BehaviorTree.CPP原生基类,同步返回SUCCESS/FAILURE | 自定义条件检查节点 |
BT::ControlNode |
BehaviorTree.CPP原生基类,管理子节点执行流 | 自定义控制节点 |
BT::DecoratorNode |
BehaviorTree.CPP原生基类,修改单个子节点行为 | 自定义装饰器节点 |
BT::ActionNodeBase |
BehaviorTree.CPP原生基类,不依赖ROS Action接口 | 自定义同步动作节点 |
BtActionNode 的核心方法:
| 方法 | 调用时机 | 是否必须覆写 | 说明 |
|---|---|---|---|
| 构造函数 | 节点实例化 | 是 | 指定XML标签名、Action Server名称、BT配置 |
providedPorts() |
工厂注册时调用 | 是 | 定义节点的输入/输出端口 |
on_tick() |
每次节点被tick时 | 否 | 设置Action Goal、获取黑板值等 |
on_wait_for_result() |
等待Action Server响应期间周期性调用 | 否 | 用于检查超时、抢占等 |
on_success() |
Action成功完成时 | 否 | 处理返回数据,写入黑板 |
on_aborted() |
Action被中止时 | 否 | 处理中止结果 |
on_cancelled() |
Action被取消时 | 否 | 处理取消结果 |
5.3 开发实战:创建自定义Action节点
以Nav2内置的 Wait 节点为例,完整展示自定义Action BT节点的开发流程:
步骤1:包含头文件
cpp
#include "nav2_behavior_tree/bt_action_node.hpp"
#include "nav2_msgs/action/wait.hpp"步骤2:定义节点类
cpp
namespace nav2_behavior_tree {
class WaitAction : public BtActionNode<nav2_msgs::action::Wait> {
public:
// 构造函数:设置XML标签名、Action Server名称、BT配置
WaitAction(
const std::string & xml_tag_name,
const std::string & action_name,
const BT::NodeConfiguration & conf)
: BtActionNode<nav2_msgs::action::Wait>(xml_tag_name, action_name, conf)
{}
// 必须覆写:定义输入/输出端口
static BT::PortsList providedPorts() {
return {
BT::InputPort<int>("wait_duration", 1, "Wait time in seconds")
};
}
// 可选覆写:每次tick时调用,用于准备Goal
void on_tick() override {
// 从输入端口读取参数(若端口未设置则使用默认值1)
getInput("wait_duration", goal_.time.sec);
goal_.time.nanosec = 0;
}
// 可选覆写:等待结果期间调用,此处检查超时
void on_wait_for_result() override {
// 可在此检查是否需要抢占当前任务
// 例如检查是否有新目标到达
}
// 可选覆写:成功完成时调用
BT::NodeStatus on_success() override {
RCLCPP_INFO(node_->get_logger(), "Wait completed successfully");
return BT::NodeStatus::SUCCESS;
}
};
} // namespace nav2_behavior_tree步骤3:注册节点到工厂
cpp
// 在插件导出文件中,将自定义类注册给行为树工厂
#include "behaviortree_cpp/bt_factory.h"
#include "nav2_behavior_tree/plugins/action/wait_action.hpp"
BT_REGISTER_NODES(factory) {
factory.registerNodeType<nav2_behavior_tree::WaitAction>("Wait");
}步骤4:编译为动态库
在 CMakeLists.txt 中将节点编译为共享库,并确保在 plugin_lib_names 参数中指定该库,使 BtNavigator 运行时能够加载。
步骤5:在XML中使用自定义节点
xml
<Wait wait_duration="5"/>5.4 开发自定义Condition节点
Condition(条件)节点继承自 BT::ConditionNode,执行同步状态检查并立即返回结果。以下是创建电池电量检查节点的示例:
cpp
#include "behaviortree_cpp/condition_node.h"
class IsBatteryLowCondition : public BT::ConditionNode {
public:
IsBatteryLowCondition(const std::string & name, const BT::NodeConfiguration & conf)
: BT::ConditionNode(name, conf)
{}
static BT::PortsList providedPorts() {
return {
BT::InputPort<double>("battery_threshold", 0.2, "Battery level threshold (0-1)")
};
}
BT::NodeStatus tick() override {
double threshold;
getInput("battery_threshold", threshold);
// 从黑板或ROS话题读取当前电量
double battery_level;
if (!getInput("battery_level", battery_level)) {
return BT::NodeStatus::FAILURE;
}
return (battery_level < threshold) ? BT::NodeStatus::SUCCESS : BT::NodeStatus::FAILURE;
}
};
BT_REGISTER_NODES(factory) {
factory.registerNodeType<IsBatteryLowCondition>("IsBatteryLow");
}5.5 高级开发主题
(a) 创建自定义控制/装饰器节点 :继承自 BT::ControlNode 或 BT::DecoratorNode 基类,可以创建比标准节点更复杂的执行逻辑(如自定义循环策略、并发控制等)。
(b) Groot2可视化开发 :Groot2(Graphical Editor for Behavior Trees)是BehaviorTree.CPP官方提供的可视化BT编辑器。开发者可在Groot2中拖拽式构建行为树,导出为XML后在Nav2中直接使用。Groot2还支持运行时连接 BtNavigator 的Groot2 Publisher端口,实现行为树执行状态的实时监控与调试。
© 子树(Subtree)封装与复用 :通过在XML中定义多个 <BehaviorTree ID="..."> 子树,可将常用的功能逻辑模块化封装,并在多个行为树中通过 <SubTree ID="..."/> 标签引用,实现"一次编写,多处复用"。
(d) 动态行为树切换:Nav2支持在每次导航请求中动态指定要使用的行为树文件路径,无需重新启动导航系统即可切换导航行为策略。
总结
行为树是Nav2导航框架的核心竞争力,它将导航决策逻辑从代码中解耦至声明式XML配置,极大提升了机器人导航系统的灵活性、可定制性和可维护性。通过理解四类基本节点(Action、Condition、Control、Decorator)的功能语义,掌握XML构建语法与黑板变量机制,并借助 BtActionNode、BtServiceNode 等模板类快速开发自定义节点,开发者能够根据具体应用需求构建从简单到高度复杂的导航行为------如仓库AGV的图基导航、巡检机器人的多路点巡逻、服务机器人的动态避障与电梯集成等。行为树的模块化设计使得每一层逻辑都可独立调试、可视化监控和渐进增强,是构建生产级自主导航系统的理想范式。
参考资料
- Nav2 官方文档 --- Nav2 project overview and behavior tree explanation
- Nav2 Behavior Trees --- Example behavior tree XML files and usage guide
- Behavior Tree XML Nodes Configuration Guide --- Complete reference of BT XML nodes with examples
- Writing a New Behavior Tree Plugin (Tutorial) --- Step-by-step guide for creating custom BT nodes
- nav2_behavior_tree Package API Documentation --- ROS 2 Humble API reference
- DeepWiki: Behavior Tree Framework (Navigation2) --- Node types classification and execution model
- DeepWiki: Behavior Tree Node Catalog --- Complete catalog of all BT nodes in Nav2
- DeepWiki: Behavior Tree Navigator --- BT Navigator architecture and execution
- DeepWiki: Recovery Behaviors --- Recovery system integration with behavior tree
- Detailed Behavior Tree Walkthrough --- In-depth walkthrough of default BT
- Nav2 Navigate To Pose With Consistent Replanning --- Advanced behavior tree example
- BehaviorTree.CPP v3 Documentation --- Official BehaviorTree.CPP library tutorials and API reference
- Macenski, S., et al., "The Marathon 2: A Navigation System," --- Academic paper describing Nav2 architecture
- Nav2中文网:详细的行为树演练 --- 中文社区的行为树参考指南