目录
- [1 LIO-SAM 介绍](#1 LIO-SAM 介绍)
- [2 核心代码](#2 核心代码)
-
- [2.1 imageProjection 部分](#2.1 imageProjection 部分)
- [2.2 featureExtraction 部分](#2.2 featureExtraction 部分)
-
- [(1) 处理流程](#(1) 处理流程)
- [2.3 imuPreintegration 部分](#2.3 imuPreintegration 部分)
- [2.4 mapOptmization 部分](#2.4 mapOptmization 部分)
1 LIO-SAM 介绍
2 核心代码
featureExtraction.cpp 特征提取角点和面点(易)
imageProjection.cpp 点云畸变矫正(易)
imuPreintegration.cpp imu预积分和位姿优化(较难)
mapOptmization.cpp 地图匹配、位姿优化和回环检测(难)
代码阅读顺序:
imageProjection >> featureExtraction >> imuPreintegration >> mapOptmization
2.1 imageProjection 部分
作为LIO-SAM的前端预处理模块,它的主要任务是将一帧无序、带有因传感器自身运动而产生畸变的原始点云,转换成一帧经过运动补偿的、有序的、滤除无效点的点云,并整理出用于后续特征提取(如角点、平面点)的辅助信息。
(1)主要订阅与发布主题
订阅:
- 原始点云 (pointCloudTopic):来自激光雷达的原始数据。
- IMU数据 (imuTopic):提供高频的姿态角速度信息,用于旋转去畸变。
- 增量里程计 (odomTopic):提供来自IMU预积分或其他来源的初步位姿估计,为后续图优化提供初始猜测,其增量信息理论上可用于位置去畸变(但代码中已注释)。
发布:
- 去畸变后的点云 (lio_sam/deskew/cloud_deskewed):供后续模块使用的核心点云。
- 点云信息 (lio_sam/deskew/cloud_info):一个自定义消息,包含处理后的点云、以及每个点的行列索引、距离、所属扫描线(ring)的起止索引等关键信息,极大方便了后续的特征提取。
(2)关键数据结构与变量
- VelodynePointXYZIRT, OusterPointXYZIRT: 定义了不同品牌雷达的点数据格式,最终统一为 PointXYZIRT使用。
- rangeMat(cv::Mat): 一个大小为 N_SCAN x Horizon_SCAN的矩阵,存储每个像素位置(对应一个点)的距离值。初始为 FLT_MAX,用于判断该位置是否已被填充,实现最近点保留。(N_SCAN 表示激光雷达的线束数量,Horizon_SCAN 表示横向扫描分辨率)
- fullCloud: 一个"图像化"的点云,fullCloud->pointscolumnIdn + rowIdn \* Horizon_SCAN 对应 rangeMat中 (rowIdn, columnIdn) 位置的点。它是一个"虚容器",很多位置是空的。
- extractedCloud: 从 fullCloud中提取出的所有有效点(即rangeMat值不为FLT_MAX的点)集合,是最终发布的点云。 imuTime, imuRotX/Y/Z 数组: 缓存当前帧点云时间段内IMU的时间戳和积分后的旋转角,用于对每个点进行精确的旋转插值。
- cloudInfo(自定义消息): 承载所有输出信息的核心结构。
(3)处理流程 (cloudHandler)
当收到一帧点云时,按顺序执行以下步骤:
cachePointCloud(缓存与转换):
- 将点云消息放入队列,确保处理时有缓冲。 从队列中取出一帧,根据雷达类型(Velodyne, Ouster, Livox)转换为统一的PointXYZIRT格式。
- 获取该帧点云的起始时间戳 (timeScanCur) 和结束时间戳 (timeScanCur + points.back().time)。
- 检查点云是否dense(无NaN点)以及是否包含ring和time通道。
deskewInfo(获取去畸变信息):
- 同步检查: 确保有覆盖本帧点云时间段的IMU数据可用。
imuDeskewInfo(IMU去畸变信息处理函数--角度积分)
- 清空早于本帧开始时间的IMU数据。
- 对IMU角速度进行数值积分,计算出本帧时间段内一系列时间点 (imuTime) 对应的累积旋转角 (imuRotX/Y/Z),存入环形数组。这等效于得到了一个关于时间的旋转函数。
- 记录本帧起始时刻的姿态 (imu_roll/pitch/yaw_init) 作为初始猜测。
odomDeskewInfo
- 找到本帧扫描开始和结束时刻对应的里程计位姿。 用开始的位姿 (startOdomMsg) 初始化 cloudInfo.initial_guess_,供后端优化使用。
projectPointCloud(点云投影与去畸变):
这是最核心的函数,逐点处理:
- 点筛选: 根据配置的最近和最远距离、扫描线号 (ring) 进行过滤。downsampleRate可对扫描线进行降采样。
- 投影到图像: 根据点的 (x,y)坐标计算水平角 horizonAngle,再根据分辨率 ang_res_x 换算成列索引 columnIdn。行索引 rowIdn 就是 ring。这样每个点都被分配到一个 (row, column) 像素位置。
- 距离图像滤波: 如果同一个 (row, column) 位置已有更近的点 (rangeMat值更小),则忽略当前点(最近点保留)。
- 运动去畸变: 对于通过筛选的点,调用 deskewPoint 函数(将其余点对齐到初始时刻)。
findRotation(基于IMU数据的时间插值功能)
- 根据该点的时间戳 pointTime,在预积分的IMU旋转数组 (imuRotX/Y/Z) 中进行线性插值,得到该点精确时刻相对于激光雷达初始时刻的旋转 (rotXCur, rotYCur, rotZCur)。
cloudExtraction(点云提取):
- 遍历 rangeMat,将所有有效点(距离不为FLT_MAX)按顺序取出,放入 extractedCloud。
- 同时,在 cloudInfo中记录:
point_col_ind: 每个有效点在其原始扫描线中的列索引。
point_range: 每个有效点的距离。
start_ring_index和 end_ring_index: 每条扫描线上有效点的起止索引(在extractedCloud中的索引),这对于按线束提取平面特征至关重要。
publishClouds(发布结果):
- 发布去畸变、有序化后的点云 extractedCloud。
- 发布包含丰富结构化信息的 cloudInfo消息,供后续的 featureExtraction节点使用。
2.2 featureExtraction 部分
-
角点(边缘点) → 用于线特征匹配
匹配原理:点到线的距离最小化
适用场景:墙角、桌沿、物体边缘
-
平面点(面点) → 用于面特征匹配
匹配原理:点到面的距离最小化
适用场景:墙面、地面、桌面
(1) 处理流程
calculateSmoothness(计算点云中每个点的平滑度或曲率)
输入: 有序点云 extractedCloud 和对应的深度数组 cloudInfo.point_range\[\]
计算步骤:
- 遍历点云(跳过边界5个点保证窗口完整)
- 对每个点i,取前后5个点(共11个点)的深度值
- 计算加权差分:前5点+后5点 - 当前点×10
- 平方得曲率:cloudCurvaturei = diffRange²
- 初始化标记数组
- 存入平滑度结构体供排序
markOccludedPoints(判断前后点)
- 标记两类不适合作为特征点的点:
(1) 被其他物体遮挡的点(Occluded Points)
(2) 激光束与表面几乎平行的点(Parallel Beam Points)
将这些点标记为cloudNeighborPickedi=1,后续不会选为特征点
遮挡检测原理
bash
视觉示意图:
情况1(前点遮挡后点): 情况2(后点遮挡前点):
○ (depth1=5m) ○ (depth1=3m)
\ /
\ /
● (depth2=2m) ● (depth2=6m)
前点遮挡了后点 后点被前点遮挡
条件判断:
1. columnDiff < 10:确保两点在同一扫描线附近
2. depth1-depth2 > 0.3:前点比后点远0.3m以上 → 前点被遮挡
3. depth2-depth1 > 0.3:后点比前点远0.3m以上 → 后点被遮挡平行光束检测原理
bash
物理原理:
激光束
↓
|\ θ (入射角很小,接近平行)
| \
| \ 物体表面
| \
○----○
当激光束与物体表面夹角θ很小时:
1. 激光点可能落在物体边缘
2. 深度测量误差增大(激光光斑被拉长)
3. 相邻点深度差异大(>2%的当前深度)
数学判断:|range[i-1]-range[i]| > 0.02×range[i] AND
|range[i+1]-range[i]| > 0.02×range[i]
表示当前点深度与前后点都有显著差异extractFeatures(提取角点和面点)
// 输入:已计算曲率和标记不可靠点的点云
// 输出:两类特征点云
cornerCloud // 边缘点/角点(高曲率,用于线特征匹配)
surfaceCloud // 平面点/面点(低曲率,用于面特征匹配)
// 处理流程:
1. 将每条扫描线分成6个子区域
2. 在每个子区域中独立提取特征
3. 对平面点进行下采样以减少数据量
4. 发布提取的特征点分块原理:
bash
每条扫描线索引范围:start_ring_index[i] ~ end_ring_index[i]
分成6等分:sp是子区域起点,ep是终点
示例:第i条线有300个点
j=0: sp=0, ep=49 (0~49)
j=1: sp=50, ep=99 (50~99)
j=2: sp=100,ep=149 (100~149)
...角点选择策略
- 从曲率最大的点开始(边缘特征最明显)
- 每个子区域最多选20个,保证特征点分布均匀
- 选择后标记周围点,避免特征点聚集
平面点选择策略
- 从曲率最小的点开始(表面最平坦)
- 没有数量限制,但会进行下采样减少数据量
- 同样标记周围点避免聚集
2.3 imuPreintegration 部分
(1)算法介绍
算法数据流程
bash
IMU数据流(高频) → imuHandler() → 实时预积分 → 发布高频IMU里程计
↓
存储队列
↓
里程计数据流(低频) → odometryHandler() → 图优化 → 更新状态算法特点与优势
- 紧耦合优化
将IMU预积分因子和激光里程计因子一起优化
实时估计和校正IMU偏差 - 增量式优化
使用gtsam::ISAM2进行增量优化
每100个关键帧重置图优化,避免计算量无限增长 - 鲁棒性设计
退化检测:当激光里程计退化时使用更大的噪声模型
故障检测:检测异常速度和偏差,及时重置系统
时间同步:正确处理IMU和激光雷达的时间戳
(2)核心函数
odometryHandler(关键优化)
bash
gtsam::ISAM2 optimizer; // 增量平滑与建图优化器
gtsam::NonlinearFactorGraph graphFactors; // 因子图
gtsam::Values graphValues; // 优化变量值
int key = 0; // 关键帧索引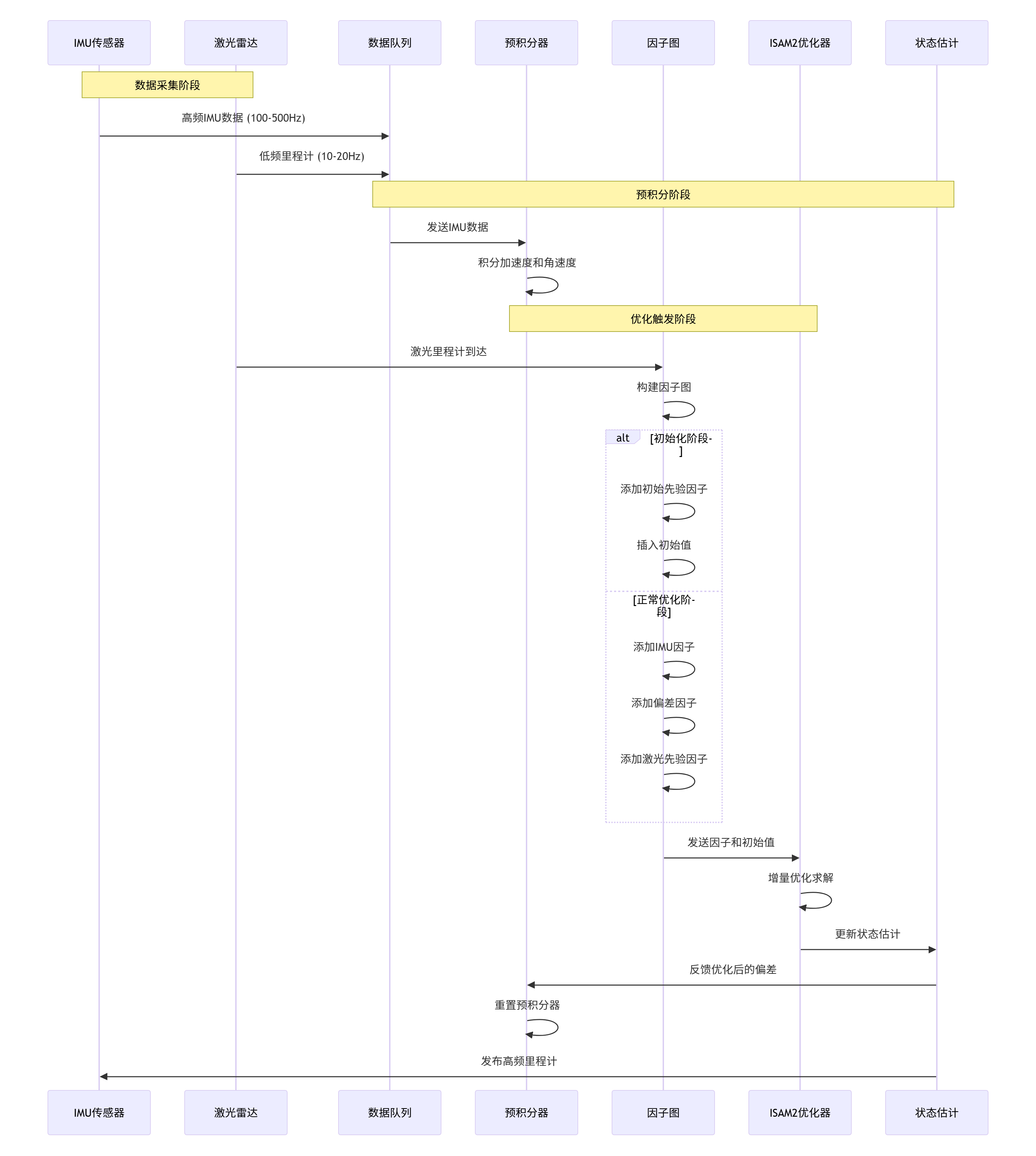
2.4 mapOptmization 部分
(1) 核心函数
cornerOptimization(角点优化)
点线距离计算:
- 对每个下采样后的角点,在地图角点云中寻找5个最近邻点
- 通过主成分分析(PCA)判断这5个点是否构成一条直线
- 如果最大特征值 > 3 * 次大特征值,则认为构成直线
- 计算当前点到直线的距离,构建点到线的距离残差
并行加速 :使用OpenMP多线程并行处理
残差加权:根据距离大小对残差进行加权,距离越近权重越高
surfOptimization
点面距离计算:
- 对每个下采样后的面点,在地图面点云中寻找5个最近邻点
- 通过最小二乘法拟合平面方程
- 计算当前点到拟合平面的距离
- 验证5个点是否都接近拟合平面(最大距离<0.2m)
平面有效性验证 :确保5个点确实能构成一个平面
残差计算:计算点到平面的距离残差
LMOptimization
Levenberg-Marquardt优化:
- 构建雅可比矩阵matA和残差向量matB
- 求解正规方程:matAtA * matX = matAtB
退化处理:
- 第一次迭代时进行特征值分析
- 如果系统退化(某些方向不可观),将退化方向的特征向量置零
- 在退化情况下,通过投影矩阵matP修正优化方向
收敛判断:
- 计算旋转和平移的增量大小
- 如果ΔR < 0.05度且ΔT < 0.05cm,认为收敛
- 坐标系转换:代码中包含激光雷达到相机的坐标系转换注释,这是从LOAM继承的
extractSurroundingKeyFrames(提取局部地图)
- 从历史关键帧中提取空间相邻的关键帧
- 构建当前优化所需的局部地图:
- 通过KD-Tree查找当前位置附近的关键帧
- 将这些关键帧的特征点云转换到世界坐标系,拼接成局部地图
scan2MapOptimization(优化流程)
- 检查特征点数是否足够
- 设置 KD-Tree 输入
- 迭代优化(最多30次):
- 角点优化
- 面点优化
- 合并系数
- LM优化,如果收敛则提前退出
- 位姿更新
performLoopClosure(闭环检测)
1. 检测闭环候选 (通过Scan Context等)
2. 构建局部地图
3. ICP匹配 (将当前帧(角点面点)与局部地图对齐)
4. 计算变换矩阵
5. 添加闭环约束到因子图
6. 优化位姿图loopFindNearKeyframes(关键帧回环)
功能 :提取指定关键帧附近多个关键帧的点云,构建局部地图
输入 :key - 中心关键帧索引,searchNum - 搜索范围
输出 :nearKeyframes - 合并后的局部地图点云
用途:为ICP匹配提供"目标点云",用于闭环检测的精确对齐
visualizeLoopClosure(回环可视化)
功能 :可视化检测到的闭环约束
输入 :loopIndexContainer - 存储闭环对(当前帧索引,历史帧索引)
输出:可视化标记(球形节点和连接线)
bash
球形节点:表示参与闭环的关键帧位置
连接线:表示检测到的闭环约束
颜色编码:
青色节点:易识别,不与其他元素冲突
黄色边:醒目,表示重要的约束关系用途:在RViz中显示闭环关系,便于调试和分析
(2)核心算法流程
bash
接收特征点云
↓
更新初始位姿(IMU/里程计)
↓
提取局部地图(空间+时间临近关键帧)
↓
下采样当前扫描
↓
Scan-to-Map优化(迭代LM优化)
↓
变换更新与IMU融合
↓
判断是否保存关键帧
↓
添加因子(里程计/GPS/闭环)
↓
iSAM2增量优化
↓
更新关键帧位姿和地图
↓
发布里程计和TF
↓
闭环时全局修正