目录
1.摘要
针对载重与续航提升背景下的物流无人机群,本文研究了一种基于大机载小机、自动化机场回收新型异构无人机取送货配送模式,并将其建模为开放式双层多目标路径优化问题。为解决传统算法忽略历史经验、计算资源冗余问题,论文提出一种结合启发式算子迁移优化算法(TOHO),通过拓扑对齐映射机制提取并重用既有任务知识,以加速新任务收敛;设计了一种基于投票机制集成遗传优化策略,利用启发式算子筛选兼具多样性与收敛性的帕累托前沿。基准测试结果证明,该方法在保证解集质量的同时,具有显著知识迁移能力与优化效率。
2.问题描述与模型建立
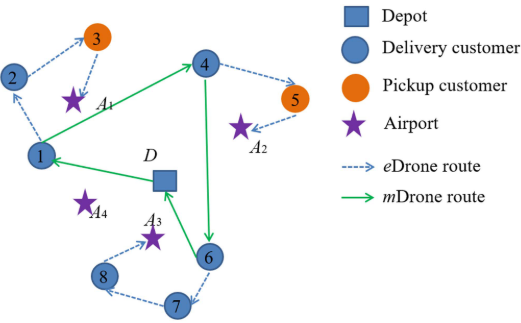
HDDPP模型由母机搭载子机至任务区释放,子机执行取送货任务后由自动化机场统一回收。通过综合考量路径总长与资源投入,实现对双目标优化表征。
目标函数最小化母机与子机总路径成本 f 1 f_1 f1及子机使用数量 f 2 f_2 f2:
min : f 1 = w 1 ∑ i ∈ C l ∪ D ∑ j ∈ C l ∪ D d i , j x i , j + w 2 ∑ k = 1 K ( ∑ i ∈ C k ∑ j ∈ C k ∪ A d i , j y i , j , k ) \min : f_1 = w_1 \sum_{i \in C_l \cup D} \sum_{j \in C_l \cup D} d_{i,j} x_{i,j} + w_2 \sum_{k=1}^{K} \left( \sum_{i \in C_k} \sum_{j \in C_k \cup A} d_{i,j} y_{i,j,k} \right) min:f1=w1i∈Cl∪D∑j∈Cl∪D∑di,jxi,j+w2k=1∑K i∈Ck∑j∈Ck∪A∑di,jyi,j,k
min : f 2 = N drones \min : f_2 = N_{\text{drones}} min:f2=Ndrones
模型约束包括:
- 母机约束,确保其由配送中心出发、单次遍历子区域并最终返回,严禁子回路;
- 子机约束,规定客户节点的唯一访问性、流量守恒及决策变量范围;
- 能耗约束,基于物理参数建立与载荷相关的能耗模型,确保总耗电不超限:
E n ( Q S ) = ( w e + Q S ) 1 3 g 3 2 ρ C r r n , ∑ i ∈ C k e i ≤ E max E_n(Q_S) = (w_e + Q_S)^{\frac{1}{3}} \sqrt{\frac{g^3}{2\rho C_r r_n}}, \quad \sum_{i \in C_k} e_i \leq E_{\text{max}} En(QS)=(we+QS)312ρCrrng3 ,i∈Ck∑ei≤Emax
- 取送货约束,严格限制子机在作业过程中的实时载荷不得超过其最大承载能力 Q S Q_S QS。
3.提出算法
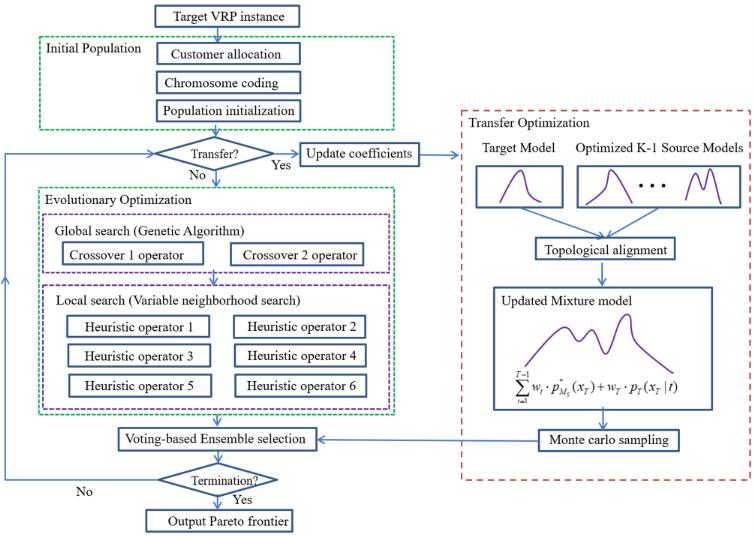
TOHO通过两种策略交替生成后代:基于拓扑对齐迁移优化策略 ,每隔 δ t \delta t δt代通过重用历史任务精英解的概率模型 P ( x ) P(x) P(x)来加速新任务收敛;集成遗传优化策略利用针对HDPPD设计多种交叉与变异算子深挖解空间,并结合投票机制筛选兼具多样性与收敛性的帕累托前沿。
基于拓扑对齐迁移优化策略
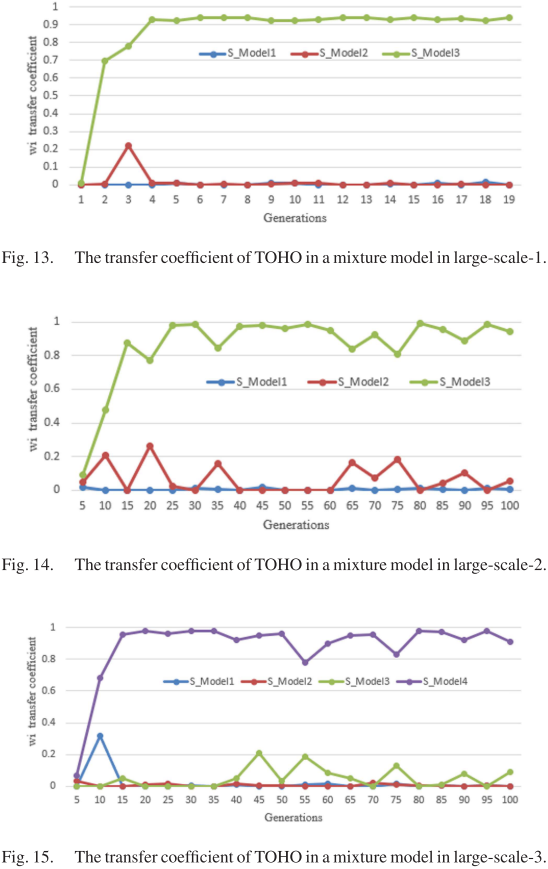
基于拓扑对齐迁移优化策略构建包含多个源任务概率分布模型 P i ( x ) P_i(x) Pi(x)与目标任务模型 P T ( x ) P_T(x) PT(x)混合模型,通过最大化对数似然函数学习迁移系数 w i w_i wi,实现知识正向迁移:
max w 1 , ... , w T ∫ χ T F T ( x T ) ( ∑ i = 1 T − 1 w i ⋅ P M i ( x i ) + w T ⋅ P T ( x T ) ) d x T \max_{w_1,\ldots,w_T}\int_{\chi_T}F_T(x_T)\left(\sum_{i=1}^{T-1}w_i\cdot P_{M_i}(x_i)+w_T\cdot P_T(x_T)\right)dx_T w1,...,wTmax∫χTFT(xT)(i=1∑T−1wi⋅PMi(xi)+wT⋅PT(xT))dxT
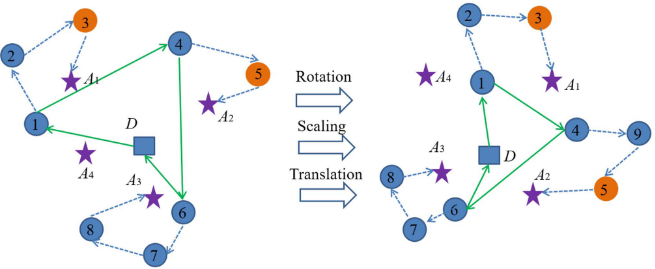
针对异构实例间搜索空间维度不一致的问题,提出拓扑对齐策略,该策略通过缩放、旋转和平移操作,将源任务节点分布映射至目标空间,建立空间变换矩阵 M i : M_i{:} Mi:
M i ( u i , j ) = α B ⋅ u i , j + b , B = cos θ − sin θ sin θ − cos θ M_i(u_{i,j})=\alpha B\cdot u_{i,j}+b,\quad B=\begin{bmatrix}\cos\theta&-\sin\theta\\\sin\theta&-\cos\theta\end{bmatrix} Mi(ui,j)=αB⋅ui,j+b,B=cosθsinθ−sinθ−cosθ
最后,利用蒙特卡洛近似获取变换后源模型 P M i ( x T ) P_{M_i}(x_T) PMi(xT)并更新混合模型。
基于启发式算子集成遗传优化策略
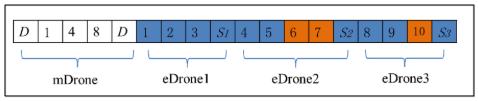
染色体编码采用整数编码方式,基因位统一表征母机投放顺序、子机取送货路径及自动化机场回收节点的索引。
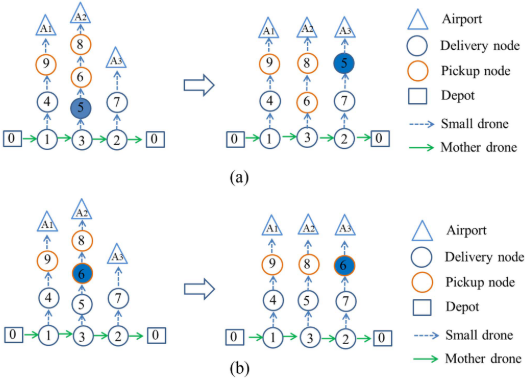
任务分配策略针对载重约束,初选聚类分配方案,并设计删除-插入启发式算子动态调整不满足载重的节点。
启发式算子设计设计了针对子区域的K点交叉算子,以及涵盖簇内/簇间、取/送节点、母机/子机节点交换的六种特异性变异算子,以提升解空间的搜索效率。
投票集选择通过集成多种多目标排序方法(投票者),构建加权投票机制筛选精英解集。
个体i的加权票数计算公式为:
V T ( i ) = ∑ j = 1 M w j ⋅ V i , j VT(i)=\sum_{j=1}^{M}w_j\cdot V_{i,j} VT(i)=j=1∑Mwj⋅Vi,j
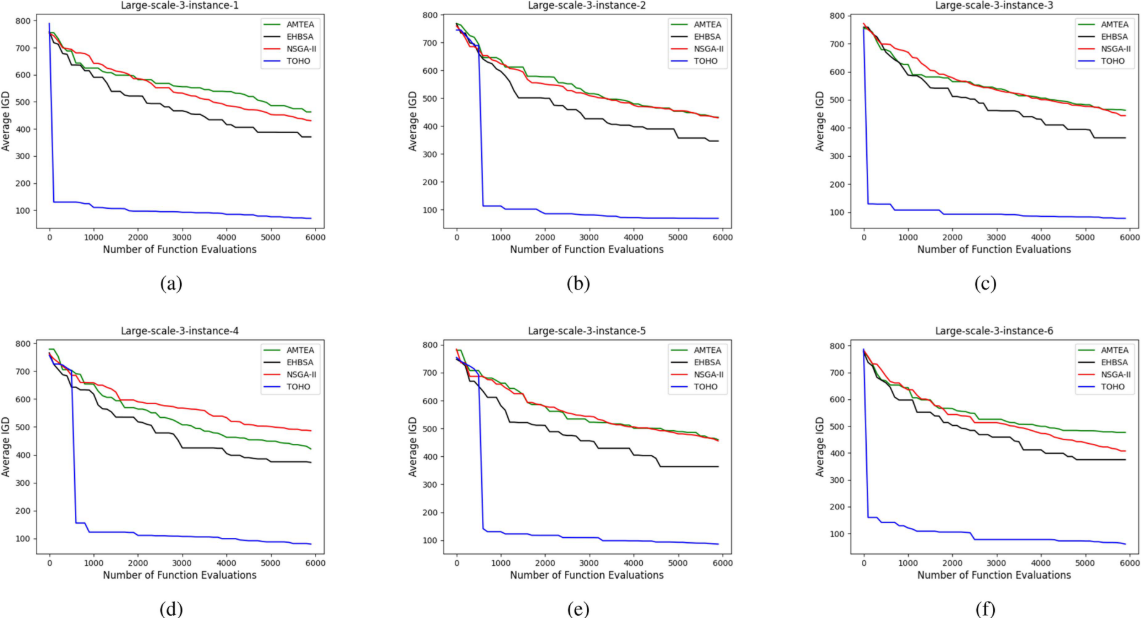
4.结果展示
5.参考文献
Wen X, Wu G, Liu J, et al. Transfer optimization for heterogeneous drone delivery and pickup problemJ. IEEE Transactions on Emerging Topics in Computational Intelligence, 2024, 9(1): 347-364.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx