课题来源: 某大学附属医院委托研发项目
案例定位: 面向脊柱内镜手术中定位穿刺高度依赖经验、反复透视辐射量大、学习曲线陡峭的临床痛点,开展基于计算机视觉的手术机器人导航规划技术转化研究
1 项目背景
某大学附属医院长期承担脊柱微创手术的临床诊疗与新技术研发工作。以经皮脊柱内镜髓核摘除术为代表的术式,其核心操作---椎间孔区穿刺定位与关节突成型,高度依赖术者的空间想象与手感经验,初学阶段不仅手术时间长、X线透视次数多,且存在误伤神经、重要脏器的风险,严重制约了技术的快速普及与同质化推广。
深度森林从高质量专利挖掘与高价值技术转化的角度切入,围绕"术中二维影像智能解析-关键解剖标志识别-路径规划-机械臂执行"全链路技术路径,完成了包含基于计算机视觉的手术机器人导航规划方法、多模态图像配准与路径自动生成、精度自校验与异常预警等多项发明专利群布局,并依托该中医院完成的32例天玑机器人改良导航辅助下PTED手术与同期35例C臂透视引导手术开展回顾性对比验证。
2 本专利要解决的问题
(1)脊柱内镜穿刺定位严重依赖术者经验与空间想象,穿刺路径规划主观性强,难以实现标准化、可复现的精准操作。
(2)传统C臂透视需反复曝光进行导引与验证,单次手术透视次数多、辐射剂量高,对医患双方均构成累积性放射损伤风险。
3 专利技术核心价值点
3.1 基于计算机视觉的二维影像关键结构感知与路径自动规划
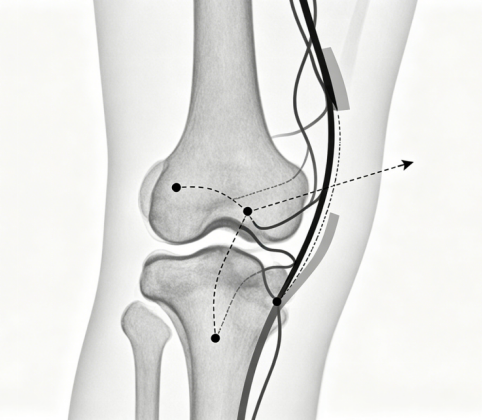
本发明构建了一种面向脊柱内镜手术的机器人导航规划方法,通过术中C臂采集正、侧位X线图像,利用卷积神经网络对椎弓根、上关节突尖、下终板中点等关键解剖标志进行实时检测与语义分割,自动提取安全穿刺路径所需的Kambin三角区边界。在此基础上,系统依据TESSYS技术规范,自动生成从皮肤穿刺点经关节突尖到达靶点的最优路径,并以机械臂导引套筒将路径实体化,显著减少了穿刺路径规划对术者经验的依赖。关键解剖标志检测精度采用均方根误差评价。
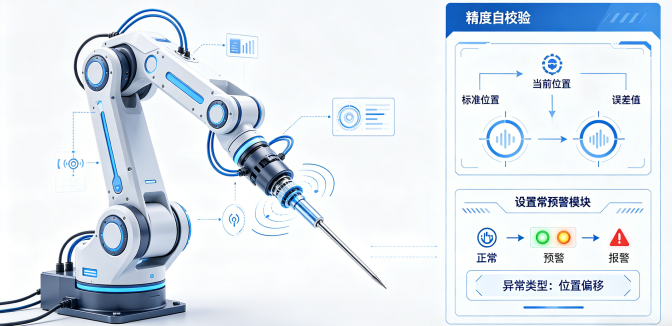
3.2 机械臂导引下"人机协同"穿刺精度自校验与安全预警机制
在机械臂导引导针置入过程中,利用术前及术中图像实时计算针尖位置与规划路径的空间偏差:

当偏差 d(t)超出预设阈值时,系统发出视觉与听觉预警,提示术者暂停操作并重新验证位置。该机制在保留术者手感判断的同时,提供了客观的空间偏差量化反馈,显著降低了导针漂移风险。
4 专利转化验证与分析
为验证本发明方法在真实临床场景下的有效性与先进性,选取该省中医院2020年6月至2022年8月收治的67例单节段腰椎间盘突出症患者进行回顾性对照研究。其中,基于本专利计算机视觉导航规划系统辅助完成手术32例,同期传统C臂透视引导下完成35例。两组患者年龄、性别、病程、突出类型及病变节段等一般资料均衡可比。
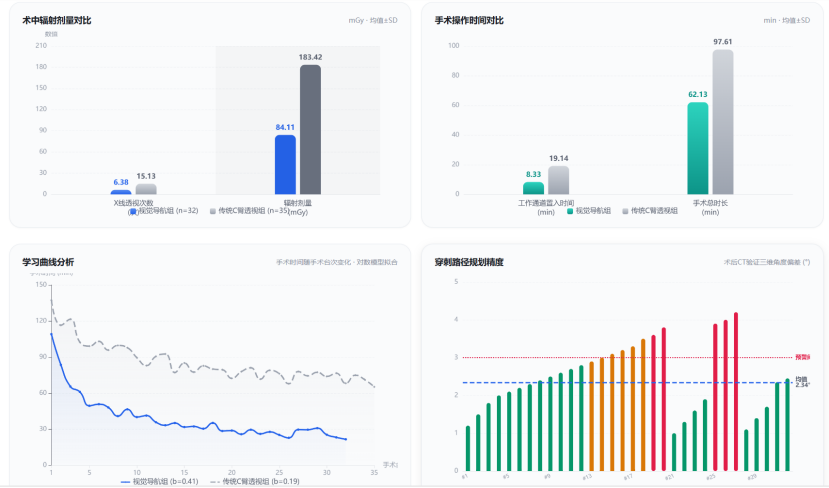
在术中辐射与操作效率方面,视觉导航组平均X线透视次数为(6.38±0.55)次,辐射剂量(84.11±6.28)mGy,工作通道置入时间(8.33±3.41)min,手术总时长(62.13±17.32)min;传统C臂透视组上述四项指标分别为(15.13±2.32)次,(183.42±17.81)mGy,(19.14±6.75)min 及(97.61±17.64)min,组间差异均具有统计学意义。结果表明,本发明将术中辐射剂量降低约54%,工作通道置入时间缩短约56%,手术总时长减少约36%。术后末次随访改良MacNab优良率视觉导航组为96.87%,C臂透视组为94.28%,差异无统计学意义,证实导航规划在不牺牲手术疗效的前提下,实现了效率与安全的同步提升。
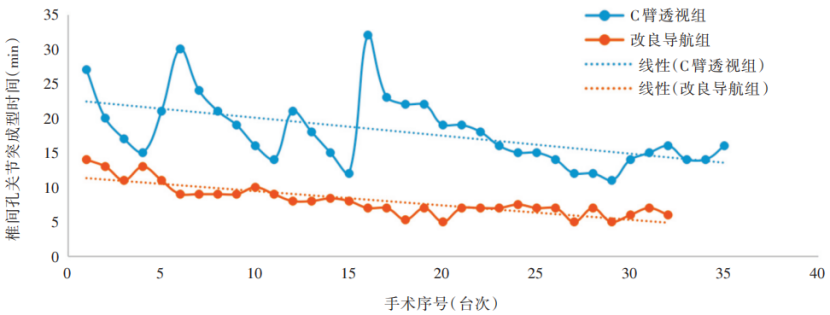
在学习曲线分析中,视觉导航组手术时间随例数增加迅速收敛并趋于恒定,学习曲线低平;传统组虽有下降趋势但波动明显。模型拟合手术时间随手术台次 n的变化遵循对数学习曲线模型:

视觉导航组学习率参数 b为0.41,显著高于传统组的0.19,表明本发明可大幅压缩初学者的技能习得周期。
在路径规划精度上,以术后CT验证实际穿刺轨迹与规划轨迹的三维角度偏差,视觉导航组平均偏差为(2.34°±1.12°),满足手术精度要求。典型病例中,系统检测到1例导针置入偏差超出3mm阈值并及时触发预警,经术中透视核实后微调,避免了潜在神经根损伤。
5 专利转化成效
相关技术成果已进入实质转化与权属固化阶段。
深度森林公司与某大学附属医院围绕"基于计算机视觉的临床手术机器人导航规划"核心技术体系,已完成1项国家发明专利与1项软件著作权的组合申请与布局。后续拟结合骨科脊柱内镜手术的规范化培训与多中心推广实施规模化临床应用部署,预期可将PTED术中透视次数控制在6次以下,导航规划置入时间压缩至10 min以内,相关技术可拓展至脊柱椎弓根螺钉置入、关节镜定位等骨科微创术式,为构建智能化、低辐射的骨科手术机器人导航体系提供关键技术支撑。
山东深度森林信息科技有限公司是一家面向高质量专利"挖掘-设计-转化"的技术服务团队。