ROS2 的 LifecycleNode 提供了精细化的节点状态管理------未配置、非激活、激活、停用、清理、关闭等状态构成了明确的状态转换图。然而,实践中多数开发者要么从未使用生命周期节点,要么只在最表层使用"激活后开始干活"的简单模式。真正复杂的系统需要面对三个问题:节点间的启动顺序依赖、状态转换回调中的执行器陷阱,以及如何利用生命周期状态实现热备。本文将逐一拆解这些容易被忽视的细节。
一、启动顺序的困境:如何让节点 B 在节点 A 完全激活后才激活?
在多节点系统中,往往存在明确的依赖关系。例如,建图节点需要先完成地图加载并进入激活状态,规划节点才能安全启动。但 ROS2 的 launch 系统默认会并行启动所有节点并各自进入它们定义的状态------这会导致依赖错误。
官方未提供直接解决依赖激活顺序的 API,但有两种可行方案。
方案一:利用 wait_for_activation 服务阻塞激活。 在节点 A 的 on_activate() 回调中,可以在完成自身初始化后,显式调用一个自定义服务(例如 /node_a/ready)。节点 B 的 on_activate() 则阻塞等待该服务响应。关键在于,on_activate() 回调是在执行器的一个线程中运行的,只要不阻塞执行器的其他任务,这种做法是可行的。更优雅的方式是使用 rclcpp::wait_for_service 配合超时。
方案二:launch 中的事件机制。 从 ROS2 Humble 开始,launch 支持 OnProcessExit 和 OnShutdown 事件,但缺少"节点进入激活状态"的事件。可以绕道:节点 A 在 on_activate() 最后创建一个临时文件或发送一个单次触发的话题。launch 中则用 ExecuteProcess 轮询该条件,再启动节点 B。这种方法较为笨拙,但无需修改节点代码。
实践推荐: 使用自定义服务同步激活状态。节点 A 在激活完成时发布一个 Trigger 服务响应;节点 B 的激活回调中调用该服务,设置合理超时(如 5 秒)。这种方式最直接且符合 ROS2 的通信模型。
二、状态转换回调中的执行器陷阱
生命周期节点的状态转换(on_configure、on_activate、on_deactivate、on_cleanup 等)默认是在执行器的主线程中顺序执行的。如果在一个转换回调中执行了阻塞操作(如长时间计算、等待网络响应、循环 spin_some 等),整个执行器会被卡住,导致:
-
其他回调(订阅、定时器、服务)无法处理
-
状态机无法响应外部的转换请求(例如来自
ros2 lifecycle set命令) -
心跳或看门狗超时,导致节点被误判为死锁
正确做法: 转换回调应尽可能快速返回。如果有耗时任务,应将其放入独立线程或使用异步模式。例如:
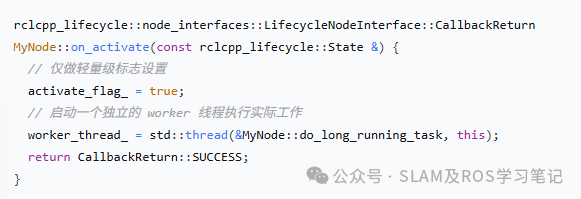
另一个容易被忽视的陷阱:在 on_cleanup() 或 on_shutdown() 中调用 rclcpp::shutdown() 会导致整个进程退出,破坏其他节点的生命周期。正确的做法是只清理本节点资源,让外部管理器决定是否终止进程。
三、原子切换:多个节点同步激活避免中间状态不一致
某些应用场景需要多个节点从非激活状态同时切换到激活状态,以保证系统行为的一致性。例如,视觉 SLAM 系统中的前端跟踪节点和后端优化节点必须同时开始接收数据,否则会出现"前端激活但后端未激活,关键帧积压"的问题。
由于每个节点的状态转换是独立的,直接逐个发送激活请求会引入毫秒级的时间差。解决方案有两种:
-
外部同步器节点:
创建一个专门的同步节点,订阅所有相关节点的生命周期状态话题(
/node_name/transition_event)。当检测到所有节点都处于"未激活"状态时,同步器节点同时(或极短时间内连续)向所有节点发送激活请求。这可以借助rclcpp::Client异步调用实现。 -
共享内存标志:
在每个节点的
on_activate()中,先检查一个共享的原子计数器或文件锁。只有当所有节点都调用了on_activate()时,最后一个节点才广播一个"开始"信号,所有节点再真正开始工作。这种方式需要节点间额外的通信协议。
实际工程中,外部同步器节点更加解耦,易于调试。
四、利用生命周期状态模拟热备(Active/Standby)
生命周期节点的"非激活"状态天然适合实现热备模式。主节点处于激活状态(Active),从节点处于非激活状态(Standby)。当主节点故障时,从节点激活并接管工作。
实现关键点:
-
主从节点使用相同的 topic 和服务名称。但同一时间只能有一个激活的发布者,否则会导致话题混乱。
-
服务重映射技巧:
在启动时,主节点使用默认名称(例如
/cmd_vel),从节点使用备用的名称(例如/cmd_vel_standby)。当主节点被检测为失效时,从节点执行激活并重新发布一个话题重映射(通过ros2 run --remap重新启动自身,或者更优雅地使用NodeOptions中的use_global_arguments和arguments()动态修改节点名称)。 -
故障检测:
可以用一个看门狗节点定期 ping 主节点的生命周期状态服务。如果主节点未响应或状态变为"关闭",则触发从节点的
activate()。
一个更简洁的方案:主从节点都订阅同一个指令话题,但只有激活状态的节点才会发布执行结果。外部客户端始终向该话题发送请求,由激活的节点响应。对于发布者角色,需要使用独占的 QoS 配置文件来确保没有重复消息。
五、总结
生命周期节点是 ROS2 中强大但常被低估的特性。真正用好它,需要理解启动顺序的依赖控制、避免转换回调阻塞执行器、设计多节点原子切换机制,以及借助非激活状态实现热备。这些技术点在高可靠性机器人系统中不可或缺。当系统需要零停机更新、故障自动恢复或严格的初始化顺序时,请记住上述解决方案。