在 AGV 系统里,"上位机"一般就是调度/监控系统 ,负责:全局任务分配、路径规划、交通管制、与 MES/WMS 对接、人机界面等;车上的 PLC / 控制器则作为下位机,负责实时运动控制、传感器采集和执行指令。两者通过以太网 / Wi‑Fi / 4G/5G / CAN 等通信协同工作。
1. AGV 中"上位机"到底指什么?
在 AGV 领域,上位机通常有两层含义:
-
整车控制系统里的"上位机"
比如工控机(IPC)+ 上位机软件,负责:
- 接收传感器数据,做 SLAM/定位、局部路径规划
- 任务管理、导航决策、给下位机 PLC/驱动器发运动指令
- 对外与 MES/WMS / 云平台通信
这时"上位机"= 车上的主控 + 决策软件。
-
多车系统里的"上位机调度系统"
工厂级"地面控制系统 / RCS / Fleet Control",一般运行在服务器或工作站上,负责:
- 多 AGV 任务调度、全局路径规划、交通管制
- 与 MES/WMS/ERP 接口、数据采集与监控
这时"上位机"= 整个 AGV 调度系统,是所有车的大脑。
很多项目里,这两个"上位机"会同时存在:车上 IPC 做车载上位机,车间服务器做调度上位机。
2. AGV 上位机的典型架构
用一个简化架构图先把角色理清:
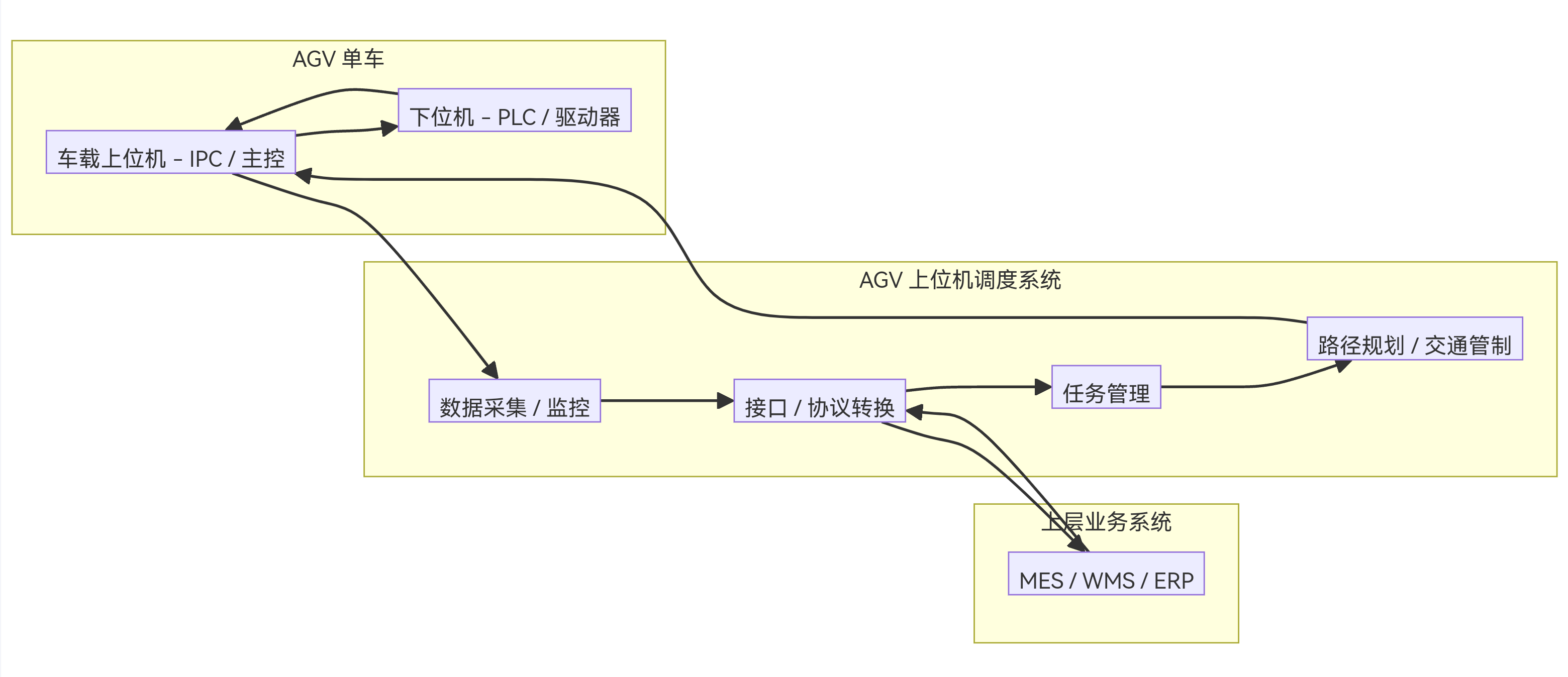
上位机核心模块(无论是车级还是系统级):
- 任务管理:接收 MES/WMS 订单,拆分成 AGV 搬运任务,排队/优先级调度
- 路径规划 & 交通管制:A*/Dijkstra 等算法规划路径,多车冲突检测与避让、死锁预防
- 状态监控 & 数据采集:实时采集 AGV 位置、电量、速度、故障等,可视化展示
- 通信 & 协议转换:与 MES/WMS、PLC、其他设备通过 Modbus/TCP、OPC UA、MQTT、HTTP 等通信
- 人机交互:操作员界面、大屏监控、配置与诊断工具
3. 上位机 vs 下位机:在 AGV 里的分工
| 角色 | 常见形态 | 主要职责 | 典型实时性要求 |
|---|---|---|---|
| 上位机 | 工控机 + 上位机软件 / 服务器调度系统 | 决策:任务调度、路径规划、全局交通管理、业务接口 | 非硬实时,几十 ms~秒级 |
| 下位机 | 车载 PLC / MCU / 运动控制板 | 执行:伺服控制、闭环位置/速度控制、IO 采集、安全逻辑 | 硬实时,μs~ms 级 |
典型分工:
- 上位机算好:目标点 (x,y,θ)、速度轮廓、路径段序列
- 下位机做:电机 PID/伺服控制、编码器反馈、急停逻辑
- 上位机与下位机通过 TCP/Modbus/CAN/EtherCAT 等交换指令和状态
4. 上位机与 AGV 之间常用通信方式
| 通信方式 | 典型用途 | 特点 |
|---|---|---|
| 以太网 / Wi‑Fi / 4G/5G | 上位机调度 ↔ 多 AGV | 大数据量、多车、远程监控;TCP/UDP/MQTT/HTTP 等 |
| CAN / RS‑485 / EtherCAT | 车内:上位机 IPC ↔ PLC/驱动器 | 实时、可靠,用于电机控制、IO 采集 |
| Modbus TCP/RTU | 简单场景:上位机 ↔ PLC/传感器 | 实现简单,寄存器级读写 |
| OPC UA / MQTT / VDA5050 | 与 MES/WMS/多品牌 AGV 互通 | 标准化接口,支持跨厂商 |
很多项目是:车内 CAN/EtherCAT 做实时控制,车外以太网/Wi‑Fi/MQTT 做调度和监控。
5. 上位机软件的关键功能点(更偏"实战")
如果你正在做 AGV 上位机开发,一般需要重点考虑:
-
通信与协议抽象层
- 支持多协议(Modbus/TCP、MQTT、OPC UA、VDA5050 等)
- 统一"AGV 状态/指令"数据模型,屏蔽不同品牌差异
-
任务 & 路径 & 交通
- 任务优先级、插队、取消、超时处理
- A*/Dijkstra + 动态权重(距离 + 拥堵度 + 电量)
- 交叉口/单向区域的交通管制,避免死锁
-
状态监控 & 故障处理
- 实时位置、电量、速度、故障码采集与展示
- 异常分级:暂停 → 重试 → 绕行 → 上报 → 人工复位
-
与 MES/WMS/ERP 集成
- 订单/任务下发、执行结果回报、状态查询接口
- 同步/异步模式、数据格式(JSON/XML)、断线重连机制
-
性能 & 可靠性
- 大车量场景:用 Kafka/MQTT + Redis 做位置/任务缓存,降低 DB 压力
- 主备调度器、热切、降级策略,避免单点故障
6. 如果你要选型/设计 AGV 上位机,可以按这个思路
-
先定范围:
- 只做单车上位机?还是多车调度上位机?
- 要对接几套 MES/WMS?几种品牌的 AGV?
-
再定架构:
- 集中式调度(简单好管,但单点风险)
- 分布式/区域调度(扩展性好,但跨区协调复杂)
-
选技术栈:
- C#/WPF + Modbus/TCP:传统工控上位机
- Java/SpringBoot + Vue + MQTT:B/S 调度系统
- ROS2/DDS:如果重度依赖 ROS 生态
-
最后细化:
- 协议栈(VDA5050 / 自定义帧)
- 地图 & 定位方式(二维码/SLAM/UWB)
- 安全 & 充电 & 运维策略