多机调度本质是"在地图+通信基础上,由调度系统把'多任务'合理拆给'多台AGV',同时做好路径规划和交通管制,避免冲突和死锁"。主流做法是"集中决策 + 分布式执行"的四层架构:接入层(对接WMS/MES)、调度层(任务分配、全局路径、交通管制)、通信层(可靠网络)、执行层(单车控制与局部避障)。
下面按架构→核心能力→关键算法→工程落地→与AGV的接口标准来拆解。
一、多机调度的整体架构
可以用一张简化的架构图来理解 AGV 多机调度:
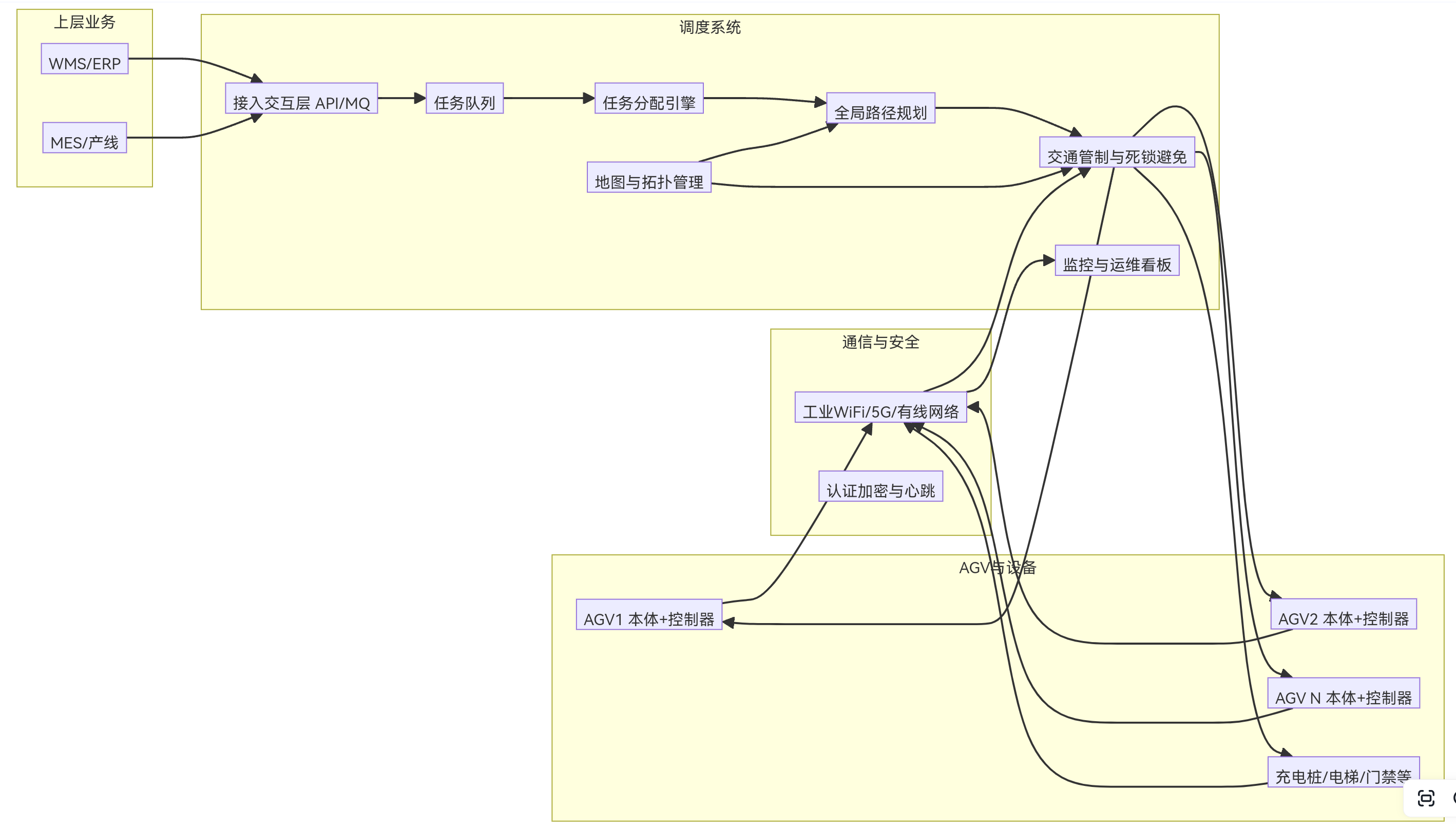
1. 分层功能说明
1)接入交互层
- 对接上层:WMS/MES/ERP,把"业务订单"翻译成"AGV任务"(从哪到哪、物料、优先级)。
- 对接人机界面:HMI、Web/移动端,用于配置地图、设备点位、下发手动任务、查看告警等。
- 对接现场设备:充电桩、电梯、门禁等,统一管控或状态联动。
2)调度与控制层(核心)
- 任务队列与任务分配:决定"哪个任务给哪台车"。
- 全局路径规划:在"拓扑图/栅格图"上为每台车计算路线,尽量少交叉、少拥堵。
- 交通管制与死锁避免:类似"虚拟红绿灯、单行道、区域互锁",防止死锁与碰撞。
3)通信与网络层
- 工业以太网、WiFi 6/工业无线、5G 等低时延网络,确保指令和状态实时交互(典型要求 <100 ms)。
- 使用 OPC UA、MQTT、HTTP/WebSocket 等协议,实现统一接入与多品牌兼容。
4)执行层(AGV 本体)
- 车载控制器(PLC/工控机)执行调速、转向、定位,闭环跟踪调度下发的路径点。
- 本地安全与避障:急停、激光雷达/视觉避障,在极端情况下保障安全冗余。
二、多机调度的核心能力
1. 任务分配(Task Allocation)
目标:把"任务集"合理映射到"AGV 集合",优化目标通常包括:
- 总完成时间最短 / 吞吐量最大
- 行驶距离/能耗最小
- 车辆负载均衡、利用率高
- 电量约束、优先级约束等
典型做法:
1)启发式规则(简单、稳定、工程常用)
- 最近车辆优先(距离任务起点最近)
- 先到先服务(FIFO)
- 最高优先级优先(紧急订单插队)
- 最小预计完成时间(考虑位置+任务执行时间)
2)精确/元启发式算法(追求全局更优)
- 建立带时间窗、车辆容量、电量等约束的数学模型,用遗传算法、模拟退火、禁忌搜索、蚁群等求解。
- 近年也有结合强化学习/深度强化学习做在线调度与路由联合优化的研究。
3)工程折中
- 规模不大(<几十台)时,常用规则 + 轻量启发式即可;
- 规模大、复杂度高时,可用"元启发式+规则"两阶段:先粗排,再实时调整。
2. 路径规划与多车协同(Routing & Multi‑robot Path Finding)
单台:A*、Dijkstra、改进 A*(考虑转弯惩罚、道路限制)等。
多台:典型挑战是"路径冲突与死锁",常见策略有:
1)集中时空规划
- 在"时间-空间"网络中联合规划多车路径,直接避免冲突;
- 代表方法:CBS(Conflict‑Based Search)及各种改进,适合车数不太多、需要严格最优的场景。
2)基于拓扑/交通规则 + 在线重规划
- 将地图抽象成"节点+边"的拓扑图;
- 定义单向通行、互斥区域、优先级等规则;
- 检测到冲突时,让低优先级车等待、让路或重规划路径(局部重新搜索)。
3)动态环境适应
- SLAM 构建与更新地图(激光/视觉),检测静态/动态障碍;
- 中央调度与车体本地避障结合:中央负责"全局无冲突路径",车体负责"实时小范围避让与轨迹跟踪"。
3. 交通管制与死锁避免(Traffic Control & Deadlock Avoidance)
这是工程上最"接地气"的部分,常见做法包括:
- 虚拟红绿灯:在交叉路口设置"许可区间",由调度统一发"通行许可"。
- 单向道:将双行道改为单向,从结构上减少对向冲突。
- 区域互锁/资源锁:关键窄道或区域,同一时间只允许一台车占用(类似互斥锁)。
- 死锁检测与解除:
- 构建"等待图(wait‑for graph)",若出现环则可能死锁;
- 通过回退某些车、强制空车让路、临时禁用某些路段等方式打破死锁。
三、调度组织方式:集中式 vs 分布式 vs 混合式
1. 集中式调度
- 一台中央调度服务器掌握全局地图、所有任务和所有车辆状态;
- 做全局任务分配和路径规划,再下发指令给各车。
- 优点:全局最优、容易保证系统级指标(最小总时间、最高吞吐)。
- 缺点:对单点性能和可靠性要求高,车数很多时实时性压力较大。
2. 分布式调度
- 每台 AGV 本身具备较强算力与自主决策能力;
- 任务通过"协商/拍卖/合同网"在车与车之间分配,局部自行规划路径。
- 优点:扩展性好、单点故障影响小,响应快。
- 缺点:全局指标难以保证,容易出现局部优而全局差的情况,冲突解决更复杂。
3. 混合式(主流工程实践)
- 中央负责:全局任务分配、大范围交通管制、跨区域协调;
- 车辆负责:局部路径调整、小范围避障、临时协商让路。
- 这也是前面说的"集中决策 + 分布执行"架构,兼顾效率与实时性。
四、与 AGV 通信的标准接口:以 VDA 5050 为例
如果你要在"同一调度系统里接入不同品牌 AGV",强烈建议了解 VDA 5050 标准:
- 它定义了"车队管理软件"与"AGV/AMR"之间的统一接口,包括:
- 订单(Order)与节点(Node)、边(Edge)的模型;
- 状态上报(位置、电量、故障、任务执行进度);
- 事件与告警机制。
- 通过标准接口,调度系统可以统一控制多品牌车队,避免被单一厂商绑架。
五、工程落地时可以怎么做(给你一个可执行的步骤)
如果你是项目负责人/架构师,可以按下面思路落地:
1)梳理业务
- 明确:任务类型(点对点搬运、分拣、上下料等)、吞吐量(托盘/h)、高峰任务数、车辆数量规模。
2)设计地图与拓扑
- 在调度系统中建模:工位、充电位、货架、通道、单行道、禁行区;
- 为关键节点/边打标签(速度限制、互斥区域、单向通行)。
3)确定调度架构
- 小规模/简单场景:可以自研基于规则+简单路径规划的集中调度;
- 大规模/多品牌:建议直接用支持 VDA 5050 或类似标准的 RCS/Fleet Management 平台,减少重复造轮子。
4)选择/实现核心算法
- 任务分配:先做最近车+优先级,再按需升级为优化算法;
- 路径:A*/Dijkstra+冲突检测+简单"让路"策略;
- 交通管制:先用"虚拟红绿灯+区域互锁",后续再做更精细的死锁检测。
5)通信与可靠性
- 选择工业级无线/有线网络,保证时延和稳定性;
- 做好心跳、断线重连、指令ACK与超时重发机制。
6)安全与运维
- 多级安全:调度层限速/限区域 + 车体本地安全 + 硬件急停;
- 完善监控:车辆利用率、拥堵点、任务延迟、故障率等看板,为后续调优提供数据。
六、如果你希望"从零实现",可以参考的模块划分
- 任务模块:任务队列、优先级、生命周期(新建→分配→执行→完成/取消)。
- 资源模块:车辆模型(位置、电量、状态)、地图/拓扑模型。
- 调度引擎:任务分配算法、重分配/迁移逻辑。
- 路径引擎:全局路径规划、冲突检测、重规划。
- 交通引擎:红绿灯/区域互锁规则、死锁检测与恢复。
- 通信模块:与 AGV 的通信协议(可先私有 TCP/HTTP,后期迁移到 VDA 5050)。
- 监控模块:状态存储、告警、统计与可视化。