导读:
在汉斯出版社《力学研究》期刊上,有文章提出了一种半主动变刚度吸振器,通过调节变刚度弹簧的有效圈数来改变吸振器的刚度和固有频率,并对该变刚度机构进行了理论验证。进一步提出了一种自适应控制算法,通过识别外部激励频率,调节吸振器在该频率下的刚度,使其达到最优。最后,利用数值仿真法,对传统吸振器和半主动吸振器的减振效果进行对比分析,从理论上验证了半主动吸振器减振性能的可行性。
作者信息:
句镇源*, 赵艳影#:南昌航空大学航空宇航学院,江西 南昌
论文详情
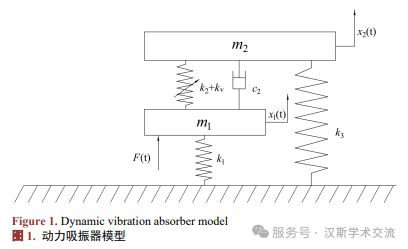
动力吸振器模型建立
图 1 是动力吸振器的模型图。
通过 MATLB 仿真可以得到主系统的幅频响应曲线,如图 2 所示。
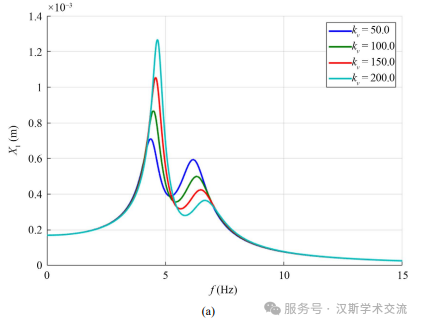
根据图 2(a)和图 2(b)所示,动力吸振器的最佳工作频率为 5.3 Hz~7 Hz。
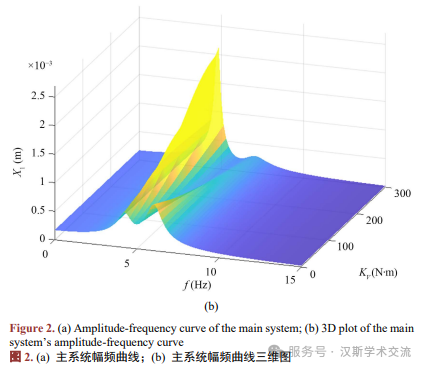
变刚度机构
本文采用机械变刚度的动力吸振器,结构示意图如图 3 所示。
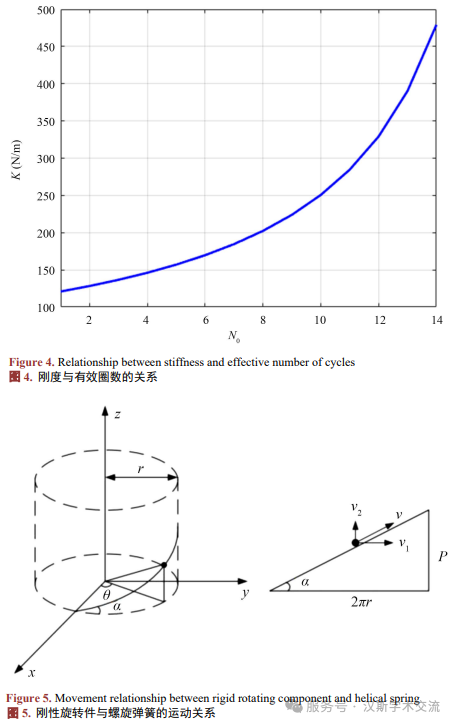
图 4 为 MATLAB 仿真计算的旋转件圈数 N0 与刚度 K 的值。从图中可以看出,随着旋转件圈数的增加,变刚度弹簧的刚度呈上升趋势。
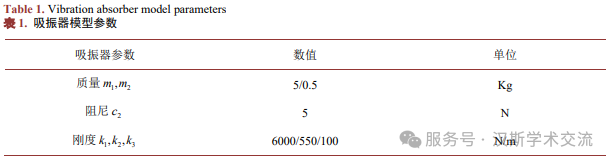
通过改变刚性旋转件的圈数,可以调节变刚度弹簧的有效圈数 N0 ,因此刚性旋转件旋转角度与刚度的变化有关。变刚度机构中旋转件的旋转路径与螺纹传动类似。几何关系如图 5 所示。
变刚度吸振器自适应调控策略
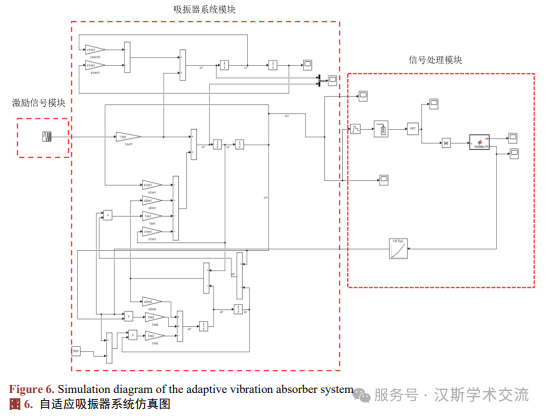
吸振器模型参数见表 1。
Simulink 仿真模型的整体框图,如图 6 所示:
根据表 1 的参数对系统模型进行仿真,得到的仿真结果如图 7 所示,图中蓝色线表示未安装吸振器时的扫频时域图,橙色线为安装吸振器时的时域图。从图中可看出,加入吸振器后,蓝色线振幅最大时对应主系统的固有频率约为 6 Hz。在共振频率下,安装吸振器时主系统的位移幅值明显减小。
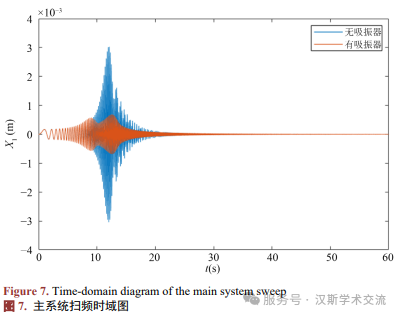
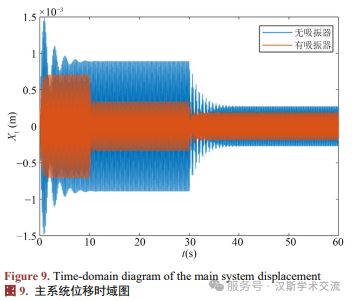
图 9 为主系统位移时域图,蓝色线和红色线为频率发生变化时主系统的位移幅值。图中 10 s 后当调节到最优刚度时,主系统的位移幅值最优,30 s 后刚度继续发生变化,主系统位移明显减小。
结论
-
当吸振器的刚度增大时,第一共振峰的幅值增大,第二共振峰的幅值减小。吸振器的两个共振峰会发生偏移,拓宽了吸振器工作频带。
-
利用半主动控制算法,通过单频和扫频激励对主系统和吸振器进行仿真。定频时,通过算法得出最优刚度,并与未安装吸振器时和被动吸振器减振效果进行对比。主系统的幅值分别减小了22%和62.5%。当频率发生改变时,刚度继续变化,主系统的幅值也相应减小。
基金项目:
国家自然科学基金资助项目(编号:12072140)