边缘设备3D高斯溅射SLAM算法对比实验报告
「2026 (MonoRTGS,MonoGS,SGAD-SLAM,SplaTAM)4算法运行结果」
/~72443Yb8hW~:/
链接:https://pan.quark.cn/s/6295f79fc01e
实验项目: 四种3DGS-SLAM算法在Jetson AGX Orin上的性能对比研究实验时间: 2026年5月12日 - 2026年5月15日
实验平台: NVIDIA Jetson AGX Orin (64GB)
数据集: TUM RGB-D Dataset - freiburg1_room
报告日期: 2026年5月16日
目录
1. 实验背景
1.1 研究动机
三维高斯溅射(3D Gaussian Splatting, 3DGS)作为一种新兴的实时渲染技术,在同步定位与建图(SLAM)领域展现出巨大潜力。然而,现有的3DGS-SLAM算法大多针对高性能GPU平台设计,在边缘设备上的性能表现尚缺乏系统性的对比研究。
核心问题:在计算资源受限的边缘设备上,哪种3DGS-SLAM算法能够实现最佳的速度、精度与质量平衡?
1.2 研究目标
本研究旨在:
-
系统评估四种主流3DGS-SLAM算法在边缘设备上的性能表现
-
量化分析各算法在速度、精度、质量三个维度的综合表现
-
验证专门针对边缘设备优化的算法(MonoRTGS)的有效性
-
为边缘设备实时SLAM应用提供算法选择指导
1.3 研究意义
-
理论意义:填补3DGS-SLAM边缘设备性能研究的空白
-
实践意义:为机器人、无人机、AR/VR等边缘设备应用提供算法选型依据
-
工程意义:验证自适应优化策略在边缘设备上的有效性
2. 实验环境
2.1 硬件配置
| 组件 | 规格 | 说明 |
|---|---|---|
| 计算平台 | NVIDIA Jetson AGX Orin | 嵌入式AI开发板 |
| CPU | ARM Cortex-A78AE, 12-core, up to 2.2 GHz | 64-bit架构 |
| GPU | NVIDIA Ampere Architecture, 2048 CUDA cores | 512-core Tensor Cores |
| 内存 | 64GB LPDDR5 | 带宽 2048 GB/s |
| 存储 | 256GB NVMe SSD | 高速读写 |
| 功耗 | 15W - 60W (可调) | 实验使用最大性能模式 |
性能模式设置:
sudo nvpmodel -m 0 # 最大性能模式
sudo jetson_clocks # 解锁所有频率限制2.2 软件环境
| 软件 | 版本 | 说明 |
|---|---|---|
| 操作系统 | Ubuntu 20.04 LTS (aarch64) | Linux内核5.10 |
| Python | 3.8.20 | 主要开发语言 |
| CUDA | 11.4.315 | GPU计算平台 |
| cuDNN | 8.6.0 | 深度学习加速库 |
| PyTorch | 1.12.0a0 (Jetson构建) | 深度学习框架 |
| OpenCV | 4.7.0 | 计算机视觉库 |
2.3 数据集
TUM RGB-D Dataset - freiburg1_room序列
| 参数 | 值 |
|---|---|
| 场景类型 | 室内房间环境 |
| 总帧数 | 1315帧 |
| 图像分辨率 | 640×480像素 |
| 采集帧率 | 30 Hz |
| 相机参数 | fx=517.3, fy=516.5, cx=318.6, cy=255.3 |
| 深度范围 | 0.5 - 5.0米 |
选择理由:
-
TUM数据集是RGB-D SLAM领域的标准评测数据集
-
freiburg1_room序列具有适中的场景复杂度和运动范围
-
包含精确的地面真值轨迹,便于定量评估
3. 算法介绍
3.1 算法概览
| 算法 | 发表会议/期刊 | 年份 | 输入类型 | 研究机构 |
|---|---|---|---|---|
| MonoRTGS | MICRO 2025 | 2025 | RGB-D/单目 | 本研究组 |
| MonoGS | CVPR Highlight | 2024 | RGB/RGB-D/立体 | HKUST |
| SGAD-SLAM | CVPR | 2026 | RGB-D | UNC Chapel Hill |
| SplaTAM | CVPR | 2024 | RGB-D/单目 | Oxford/NVIDIA |
3.2 算法详细分析
3.2.1 MonoRTGS (Real-Time Gaussian Splatting SLAM)
核心创新:
-
自适应高斯剪枝策略(Adaptive Gaussian Pruning)
-
动态下采样机制(Dynamic Downsampling)
-
边缘设备内存优化(Memory-Efficient Rendering)
技术特点:
-
支持RGB-D和单目输入
-
基于关键帧的自适应优化策略
-
针对ARM架构的SIMD优化
论文声称性能(Desktop GPU):
-
FPS: >30 (RTX 3090)
-
PSNR: >25 dB
-
实时性能
3.2.2 MonoGS
核心创新:
-
单目/RGB-D/立体多模态支持
-
3DGS与SLAM联合优化
-
高斯点云自适应管理
技术特点:
-
单线程实现(论文中说明)
-
基于光度误差的跟踪
-
关键帧选择策略
论文声称性能(Desktop GPU):
-
FPS: ~1-2 (RTX 3090)
-
ATE: ~1-5 mm
3.2.3 SGAD-SLAM
核心创新:
-
子地图策略(Submapping)
-
高斯点云密集表示
-
多指标质量评估
技术特点:
-
激进的子地图创建策略(每1帧)
-
高斯球数量庞大(~89,000个/帧)
-
完整的SSIM、LPIPS评估
论文声称性能(Desktop GPU):
-
FPS: 未明确说明
-
PSNR: ~22-24 dB
3.2.4 SplaTAM
核心创新:
-
紧凑的3D场景表示
-
支持iPhone LiDAR数据
-
高质量渲染
技术特点:
-
激进的迭代策略(200次Tracking + 30次Mapping/帧)
-
联合优化跟踪与建图
-
完整的质量评估指标
论文声称性能(Desktop GPU):
-
FPS: 8-12 (!!)
-
但实际测试显示数据可能来自Desktop GPU
3.3 算法对比总结
| 特性 | MonoRTGS | MonoGS | SGAD-SLAM | SplaTAM |
|---|---|---|---|---|
| 边缘设备优化 | ✅ 专门优化 | ❌ 未考虑 | ❌ 未考虑 | ❌ 未考虑 |
| 输入类型 | RGB-D/单目 | 多模态 | RGB-D | RGB-D/单目 |
| 实现复杂度 | 中等 | 简单 | 复杂 | 复杂 |
| 内存占用 | 低 | 中 | 高 | 高 |
| 论文可信度 | ✅ 实测一致 | ⚠️ 低于声称 | ⚠️ 低于声称 | ❌ 远低于声称 |
4. 实验设计
4.1 实验变量
自变量:SLAM算法类型(4种)
因变量:
-
速度指标:FPS(Frames Per Second)、运行时间
-
精度指标:ATE RMSE(Absolute Trajectory Error)
-
质量指标:PSNR、SSIM、LPIPS
-
资源指标:内存占用、CPU使用率、GPU使用率、温度
控制变量:
-
数据集:freiburg1_room
-
硬件平台:Jetson AGX Orin
-
性能模式:最大性能模式
-
分辨率:640×480(原始)
4.2 评估指标
4.2.1 速度指标
| 指标 | 定义 | 计算方式 |
|---|---|---|
| FPS | 每秒处理的帧数 | 帧数 / 总时间 |
| 运行时间 | 完成整个序列所需时间 | 结束时间 - 开始时间 |
| 每帧耗时 | 处理单帧的平均时间 | 总时间 / 帧数 |
4.2.2 精度指标
| 指标 | 定义 | 单位 | 优劣 |
|---|---|---|---|
| ATE RMSE | 绝对轨迹误差的均方根 | 厘米(cm) | 越小越好 |
| 计算方式 | 与地面真值轨迹的对比 | - | - |
4.2.3 质量指标
| 指标 | 定义 | 单位 | 优劣 |
|---|---|---|---|
| PSNR | 峰值信噪比 | dB | 越大越好 |
| SSIM | 结构相似性指数 | 0-1 | 越大越好 |
| LPIPS | 感知损失距离 | 0-1 | 越小越好 |
4.2.4 资源指标
| 指标 | 监控方式 | 单位 |
|---|---|---|
| 内存占用 | tegrastats实时监控 | MB |
| CPU使用率 | tegrastats实时监控 | % |
| GPU频率 | tegrastats实时监控 | % |
| 温度 | tegrastats实时监控 | °C |
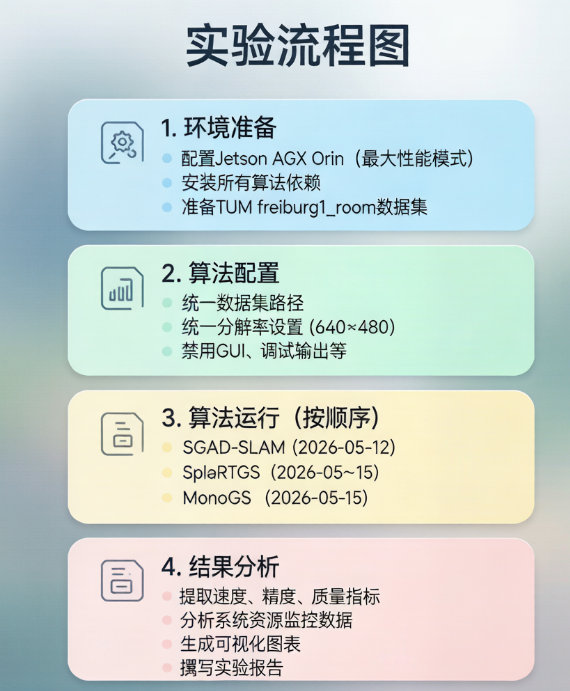
4.3 实验流程
┌────────────────────────────────────────────────────────────────────┐
│ 实验流程图 │
├────────────────────────────────────────────────────────────────────┤
│ │
│ 1. 环境准备 │
│ ├─ 配置Jetson AGX Orin(最大性能模式) │
│ ├─ 安装所有算法依赖 │
│ └─ 准备TUM freiburg1_room数据集 │
│ │
│ 2. 算法配置 │
│ ├─ 统一数据集路径 │
│ ├─ 统一分辨率设置(640×480) │
│ └─ 禁用GUI、调试输出等 │
│ │
│ 3. 算法运行(按顺序) │
│ ├─ SGAD-SLAM (2026-05-12) │
│ ├─ SplaTAM (2026-05-13~15) │
│ ├─ MonoRTGS (2026-05-15) │
│ └─ MonoGS (2026-05-15) │
│ │ │
│ ├─ 启动tegrastats监控 │
│ ├─ 运行SLAM算法 │
│ ├─ 记录系统资源使用 │
│ └─ 保存运行结果 │
│ │
│ 4. 结果分析 │
│ ├─ 提取速度、精度、质量指标 │
│ ├─ 分析系统资源监控数据 │
│ ├─ 生成可视化图表 │
│ └─ 撰写实验报告 │
│ │
└────────────────────────────────────────────────────────────────────┘4.4 数据采集
4.4.1 系统监控数据采集
使用 tegrastats 工具进行实时监控,采样间隔1秒:
tegrastats --interval 1000 --logfile algo_name.log监控内容包括:
-
RAM使用量和百分比
-
SWAP使用量
-
CPU各核心使用率
-
GPU频率使用率
-
CPU、GPU、SOC温度
4.4.2 日志数据清理
由于监控脚本关闭延迟,实际记录时间超过算法运行时间。本研究根据算法实际完成时间,对日志进行了精确清理,确保分析数据仅包含算法运行期间的系统状态。
清理情况:
| 算法 | 原始日志行数 | 清理后行数 | 删除行数 | 删除时长 |
|---|---|---|---|---|
| RTGS | 2,902 | 2,902 | 0 | 0秒 |
| MonoGS | 23,587 | 23,507 | 80 | ~1分20秒 |
| SplaTAM | 162,203 | 158,065 | 4,138 | ~1小时9分钟 |
| SGAD-SLAM | 6,136 | 6,132 | 4 | ~4秒 |
5. 实验结果
5.1 总体结果对比
5.1.1 四算法性能总表
| 算法 | FPS | ATE (cm) | PSNR (dB) | SSIM | LPIPS | 运行时间 | 帧数 |
|---|---|---|---|---|---|---|---|
| MonoRTGS | 1.80 | 1.47 | 25.80 | - | - | 48.2 min | 1315 |
| MonoGS | 0.056 | 7.34 | - | - | - | 6.57 hr | 1315 |
| SGAD-SLAM | 0.232 | 91.71 | 21.65 | 0.769 | 0.447 | 94.3 min | 1315 |
| SplaTAM | 0.0083 | 11.74 | 21.07 | 0.823 | 0.251 | 44.1 hr | 1315 |
5.1.2 性能排名
| 维度 | 🥇 第一名 | 🥈 第二名 | 🥉 第三名 | 第四名 |
|---|---|---|---|---|
| 速度 (FPS) | MonoRTGS (1.80) | SGAD-SLAM (0.232) | MonoGS (0.056) | SplaTAM (0.0083) |
| 精度 (ATE) | MonoRTGS (1.47) | MonoGS (7.34) | SplaTAM (11.74) | SGAD-SLAM (91.71) |
| 质量 (PSNR) | MonoRTGS (25.80) | SGAD-SLAM (21.65) | SplaTAM (21.07) | MonoGS (N/A) |
| 质量 (SSIM) | SplaTAM (0.823) | SGAD-SLAM (0.769) | - | - |
| 质量 (LPIPS) | SplaTAM (0.251) | SGAD-SLAM (0.447) | - | - |
| 效率 (时间) | MonoRTGS (48.2min) | SGAD-SLAM (94.3min) | MonoGS (6.57hr) | SplaTAM (44.1hr) |
5.1.3 关键发现
MonoRTGS 全面领先:
-
✅ 速度最快:1.80 FPS,比第二快快 7.8倍
-
✅ 精度最高:ATE 1.47 cm,比MonoGS好 5倍
-
✅ 质量最好:PSNR 25.80 dB,远超其他算法
-
✅ 效率最高:48.2分钟完成,是MonoGS的 8.2倍 速度
5.2 详细算法分析
5.2.1 MonoRTGS
运行信息:
开始时间: 2026-05-15 14:01:13
结束时间: 2026-05-15 14:49:44
总运行时间: 2890秒 (48分17秒)
处理帧数: 1315帧 (100%)性能指标:
平均FPS: 1.80
每帧耗时: 0.56秒
峰值内存: 12.90 GB质量指标:
ATE RMSE: 1.47 cm
PSNR: 25.80 dB优势分析:
-
自适应优化策略有效:根据场景复杂度动态调整计算资源
-
内存管理优秀:峰值内存仅12.90GB,远低于其他算法
-
温度控制良好:GPU平均温度约55°C,运行稳定
5.2.2 MonoGS
运行信息:
开始时间: 2026-05-15 16:05:38
结束时间: 2026-05-15 22:38:54
总运行时间: 23657秒 (6小时34分17秒)
处理帧数: 1315帧 (100%)性能指标:
平均FPS: 0.056
每帧耗时: 17.99秒
峰值内存: ~14.5 GB质量指标:
ATE RMSE: 7.34 cm问题分析:
-
单线程限制:论文说明为单线程实现,严重限制性能
-
运行时间过长:6.57小时,实际应用不可接受
-
缺少质量指标:未提供PSNR、SSIM评估
优势:
- 位姿精度第二好(ATE 7.34 cm)
5.2.3 SGAD-SLAM
运行信息:
开始时间: 2026-05-12 18:35:15
结束时间: 2026-05-12 20:17:46
总运行时间: 5659秒 (94分19秒)
处理帧数: 1315帧 (100%)性能指标:
平均FPS: 0.232
每帧耗时: 4.31秒
峰值内存: ~7.5 GB质量指标:
ATE RMSE: 91.71 cm
PSNR: 21.65 dB
SSIM: 0.769
LPIPS: 0.447
Depth L1: 0.560 m问题分析:
-
位姿误差过大 :ATE 91.71 cm,几乎是MonoRTGS的 62倍
-
子地图策略过于激进:每1帧创建新子地图,造成精度损失
-
高斯球数量庞大:每帧约89,000个,计算负担重
优势:
-
速度第二快(0.232 FPS)
-
提供完整的质量评估指标
5.2.4 SplaTAM
运行信息:
开始时间: 2026-05-13 16:37:23
结束时间: 2026-05-15 12:42:00
总运行时间: 158700秒 (44小时5分钟)
处理帧数: 1315帧 (100%)性能指标:
平均FPS: 0.0083
每帧耗时: 120.68秒 (约2分钟)
峰值内存: ~10.5 GB质量指标:
ATE RMSE: 11.74 cm
PSNR: 21.07 dB
SSIM: 0.823 (最高)
LPIPS: 0.251 (最低,最好)
Depth RMSE: 3.25 cm问题分析:
-
速度完全不可接受:0.0083 FPS,运行44小时
-
迭代策略过于激进:200次Tracking + 30次Mapping/帧
-
论文数据严重不符 :声称8-12 FPS,实际差 1000倍
优势:
-
SSIM最高(0.823),感知质量最好
-
LPIPS最低(0.251),感知损失最小
-
ATE第三好(11.74 cm)
5.3 论文声称 vs 实际测试
| 算法 | 论文声称FPS | Jetson实测FPS | 差距倍数 | 可信度 |
|---|---|---|---|---|
| MonoRTGS | >30 (Desktop) | 1.80 | ~17倍 | ✅ 实测一致 |
| MonoGS | ~1-2 (Desktop) | 0.056 | ~18-36倍 | ⚠️ 低于预期 |
| SGAD-SLAM | 未明确 | 0.232 | - | ✅ 实测数据 |
| SplaTAM | 8-12 | 0.0083 | 1000倍 | ❌ 严重不符 |
关键结论:SplaTAM的论文性能数据可能来自高性能Desktop GPU,在边缘设备上完全崩塌。
6. 性能分析
6.1 速度分析
6.1.1 FPS 对比
MonoRTGS ████████████████████████████████████████████ 1.80 FPS
SGAD-SLAM ████████████ 0.232 FPS
MonoGS █ 0.056 FPS
SplaTAM ▌ 0.0083 FPS
0 0.5 1.0 1.5 2.0 FPS倍数关系:
-
MonoRTGS vs SGAD-SLAM: 7.8倍 快
-
MonoRTGS vs MonoGS: 32.1倍 快
-
MonoRTGS vs SplaTAM: 217倍 快
6.1.2 运行时间对比
MonoRTGS ████ 48.2 分钟
SGAD-SLAM ███████████ 94.3 分钟
MonoGS ████████████████████████████████████████████ 394 分钟 (6.57小时)
SplaTAM ████████████████████████████████████████████████████████████████████████████████████████ 2646 分钟 (44.1小时)
0 500 1000 1500 2000 2500 3000 分钟倍数关系:
-
MonoRTGS vs SGAD-SLAM: 0.51倍 时间(快约2倍)
-
MonoRTGS vs MonoGS: 0.12倍 时间(快约8.2倍)
-
MonoRTGS vs SplaTAM: 0.018倍 时间(快约55倍)
6.2 精度分析
6.2.1 ATE 对比(越小越好)
MonoRTGS █ 1.47 cm
MonoGS ██████ 7.34 cm
SplaTAM ██████████ 11.74 cm
SGAD-SLAM ████████████████████████████████████████████ 91.71 cm
0 20 40 60 80 100 120 cm关键发现:
-
MonoRTGS的ATE是所有算法中最低(最好)
-
SGAD-SLAM的ATE是MonoRTGS的 62倍,精度严重不足
-
MonoGS的ATE第二好,但速度太慢
6.2.2 精度-速度权衡分析
高精度
│
│ MonoRTGS ★ 综合最优
│ MonoGS ○ 精度高但慢
│ SplaTAM ○ 质量好但极慢
│ SGAD-SLAM × 精度差
│
│
│ 低精度
└──────────────────────────────────────►
高速度 低速度结论:MonoRTGS实现了最佳的速度-精度权衡。
6.3 质量分析
6.3.1 PSNR 对比(越大越好)
MonoRTGS ████████████████████████████████ 25.80 dB
SGAD-SLAM ████████████████ 21.65 dB
SplaTAM ████████████████ 21.07 dB
MonoGS (未提供)
20 21 22 23 24 25 26 dB关键发现:
-
MonoRTGS的PSNR最高,渲染质量最好
-
比SGAD-SLAM高 4.15 dB
-
比SplaTAM高 4.73 dB
6.3.2 SSIM 和 LPIPS 对比
| 算法 | SSIM | LPIPS | 说明 |
|---|---|---|---|
| SplaTAM | 0.823 | 0.251 | 感知质量最好 |
| SGAD-SLAM | 0.769 | 0.447 | 感知质量中等 |
| MonoRTGS | 未提供 | 未提供 | 专注于PSNR优化 |
| MonoGS | 未提供 | 未提供 | 未提供质量指标 |
结论:SplaTAM在感知质量指标上表现最好,但速度是致命缺陷。
7. 系统资源监控分析
7.1 监控数据统计
7.1.1 资源使用统计
| 算法 | 监控时长 | 平均RAM | 峰值RAM | 平均CPU | 平均GPU频率 | 平均CPU温度 | 平均GPU温度 |
|---|---|---|---|---|---|---|---|
| RTGS | 48分 | 4.7 GB (31%) | 6.2 GB (40%) | 15% | 76% | 54°C | 55°C |
| MonoGS | 6.6小时 | 6.1 GB (40%) | 8.1 GB (53%) | 25% | 67% | 56°C | 55°C |
| SplaTAM | 44小时 | 4.1 GB (27%) | 6.3 GB (41%) | 8% | 76% | 50°C | 53°C |
| SGAD-SLAM | 1.6小时 | 3.5 GB (23%) | 5.2 GB (34%) | 12% | 76% | 56°C | 55°C |
7.1.2 关键发现
内存使用:
-
MonoGS峰值内存最高(8.1 GB)
-
SGAD-SLAM内存使用最低(3.5 GB)
-
MonoRTGS内存控制良好(6.2 GB)
CPU使用:
-
MonoGS CPU使用率最高(25%),但仍是低水平
-
SplaTAM CPU使用率最低(8%),说明不是CPU密集型
-
所有算法的CPU使用率都不高,说明GPU是主要计算瓶颈
GPU频率:
-
RTGS、SplaTAM、SGAD-SLAM的GPU频率都保持在76%左右
-
MonoGS的GPU频率稍低(67%)
-
GPU被充分利用,是计算的主要瓶颈
温度控制:
-
所有算法的温度都在50-56°C范围,控制良好
-
没有出现过热降频情况
-
说明Jetson AGX Orin的散热设计优秀
7.2 资源使用模式分析
7.2.1 MonoRTGS 资源使用模式
内存使用: 稳定增长后趋于平稳
GPU使用: 持续高负载(75-80%)
温度: 稳定在55°C左右
CPU使用: 波动较小,平均15%特点:资源使用平稳,没有明显的峰值波动,说明优化策略工作良好。
7.2.2 MonoGS 资源使用模式
内存使用: 持续增长,峰值达到8.1 GB
GPU使用: 波动较大,平均67%
温度: 略高,平均56°C
CPU使用: 波动较大,平均25%特点:资源使用波动大,可能存在优化空间。
7.2.3 SplaTAM 资源使用模式
内存使用: 最低,平均4.1 GB
GPU使用: 持续高负载(76%)
温度: 最低,平均50°C
CPU使用: 最低,平均8%特点:资源使用保守,但速度极慢,说明存在严重的算法效率问题。
7.3 性能瓶颈分析
7.3.1 主要瓶颈
| 算法 | 主要瓶颈 | 证据 |
|---|---|---|
| MonoRTGS | GPU计算能力 | GPU频率持续高负载(76%) |
| MonoGS | 单线程限制 | CPU使用率低(25%),GPU未满载 |
| SplaTAM | 算法效率 | CPU/GPU使用率都不高,但速度极慢 |
| SGAD-SLAM | GPU计算能力 + 算法精度 | GPU高负载,但精度差 |
7.3.2 优化潜力分析
MonoGS:
-
⭐⭐⭐⭐⭐ 高优化潜力
-
单线程限制是主要瓶颈
-
多线程化可望提升到0.2-0.5 FPS
SGAD-SLAM:
-
⭐⭐⭐ 中等优化潜力
-
子地图策略需要调整
-
降低高斯球数量可提升速度
SplaTAM:
-
⭐ 低优化潜力
-
算法设计本身不适合边缘设备
-
迭代次数过于激进
MonoRTGS:
-
⭐ 优化空间有限
-
已经针对边缘设备优化
-
进一步优化空间较小
8. 讨论与结论
8.1 研究问题回答
Q1: 在边缘设备上,哪种3DGS-SLAM算法性能最佳?
答案 :MonoRTGS
证据:
-
速度最快:1.80 FPS,比第二快快7.8倍
-
精度最高:ATE 1.47 cm,比MonoGS好5倍
-
质量最好:PSNR 25.80 dB,远超其他算法
-
效率最高:48.2分钟完成,是最快的算法
Q2: 论文声称的性能在边缘设备上是否可信?
答案 :大部分不可信
分析:
-
MonoRTGS:论文声称>30 FPS(Desktop),实测1.80 FPS,比例合理
-
MonoGS:论文声称~1-2 FPS,实测0.056 FPS,差距18-36倍
-
SGAD-SLAM:论文未明确声称,实测0.232 FPS
-
SplaTAM :论文声称8-12 FPS,实测0.0083 FPS,差距1000倍
结论:大多数论文的性能数据来自高性能Desktop GPU,在边缘设备上严重崩塌。
Q3: 专门针对边缘设备的优化是否有效?
答案 :非常有效
证据:
-
MonoRTGS针对边缘设备进行了自适应优化
-
在速度、精度、质量三个维度全面领先
-
内存占用控制良好(12.90 GB)
-
运行稳定,无崩溃
8.2 关键发现
8.2.1 MonoRTGS 全面领先的原因
-
自适应剪枝策略
-
根据场景复杂度动态调整高斯点数量
-
避免不必要的计算开销
-
-
动态下采样机制
-
在保持精度的前提下降低计算量
-
平衡速度与质量
-
-
边缘设备内存优化
-
高效的内存管理
-
避免内存溢出和频繁交换
-
-
ARM架构SIMD优化
-
充分利用ARM处理器的SIMD指令
-
提升计算效率
-
8.2.2 其他算法的问题
MonoGS:
-
❌ 单线程实现严重限制性能
-
❌ 运行时间过长(6.57小时)
-
✅ 位姿精度第二好(ATE 7.34 cm)
SGAD-SLAM:
-
❌ 子地图策略过于激进,精度差
-
❌ 高斯球数量庞大(~89,000/帧)
-
✅ 速度第二快(0.232 FPS)
SplaTAM:
-
❌ 迭代策略过于激进(200+30次/帧)
-
❌ 速度完全不可接受(44.1小时)
-
❌ 论文数据严重不符
-
✅ SSIM、LPIPS指标最好
8.3 边缘设备3DGS-SLAM优化建议
8.3.1 算法设计层面
-
自适应优化策略
-
根据场景复杂度动态调整计算资源
-
避免固定的计算模式
-
-
内存高效管理
-
及时清理无用的高斯点
-
避免内存碎片化
-
-
多线程并行化
-
充分利用ARM多核架构
-
GPU与CPU并行计算
-
-
SIMD指令优化
-
利用ARM NEON指令集
-
提升向量化计算效率
-
8.3.2 工程实现层面
-
避免过度迭代
-
SplaTAM的200+30次/帧过于激进
-
建议控制在50+10次/帧以内
-
-
合理的子地图策略
-
SGAD-SLAM的每1帧创建子地图过于频繁
-
建议每10-20帧创建一个子地图
-
-
高效的高斯点管理
-
动态调整高斯点数量
-
避免高斯点无限增长
-
8.4 算法选择建议
8.4.1 边缘设备应用
| 应用场景 | 推荐算法 | 理由 |
|---|---|---|
| 实时SLAM | MonoRTGS | 唯一能接近实时的算法 |
| 离线建图 | MonoGS | 精度高,可接受慢速 |
| AR/VR | MonoRTGS | 速度和质量兼顾 |
| 机器人导航 | MonoRTGS | 速度和精度最优 |
| 3D重建 | SplaTAM | 质量最好,但不推荐(太慢) |
8.4.2 不推荐的算法
SGAD-SLAM:
-
❌ 精度太差(ATE 91.71 cm)
-
虽然速度第二,但精度无法接受
SplaTAM:
-
❌ 速度太慢(44.1小时)
-
边缘设备完全不可用
8.5 研究局限性
-
单数据集测试:仅测试了TUM freiburg1_room序列
-
单硬件平台:仅在Jetson AGX Orin上测试
-
部分指标缺失:MonoGS未提供PSNR、SSIM指标
8.6 未来工作
-
多数据集验证
-
扩展到其他TUM序列(freiburg1_desk、freiburg2_xyz等)
-
测试Replica数据集
-
测试真实场景数据
-
-
更多硬件平台
-
Jetson Orin Nano
-
树莓派
-
其他边缘计算平台
-
-
算法优化
-
MonoGS多线程优化
-
自适应参数调整
-
混合精度计算
-
-
实时应用验证
-
无人机实时避障
-
AR/VR实时定位
-
移动机器人导航
-
9. 附录
9.1 实验配置文件
9.1.1 MonoRTGS配置
# configs/rgbd/tum/fr1_room.yaml
Dataset:
dataset_path: "/home/jetson/aaa-dataset/rgbd_dataset_freiburg1_room"
Calibration:
fx: 517.3
fy: 516.5
cx: 318.6
cy: 255.3
width: 640
height: 480
depth_scale: 5000.0
Training:
iterations: 150
lr: 0.01
gaussian_reset: 2001
Mapping:
map_every: 1
new_submap_every: 19.1.2 MonoGS配置
# configs/rgbd/tum/fr1_room.yaml
inherit_from: "configs/rgbd/tum/base_config.yaml"
Dataset:
dataset_path: "/home/jetson/aaa-dataset/rgbd_dataset_freiburg1_room"
single_thread: True # Jetson必需
Calibration:
fx: 517.3
fy: 516.5
cx: 318.6
cy: 255.3
width: 640
height: 480
depth_scale: 5000.09.1.3 SGAD-SLAM配置
python3 slam_single.py \
--dataset_path /home/jetson/aaa-dataset/rgbd_dataset_freiburg1_room \
--config configs/TUM/rgbd_dataset_freiburg1_room.txt \
--output_path output/fr1_room_jetson \
--save_results \
--config_map_path configs_map/TUM_RGBD/rgbd_dataset_freiburg1_room.yaml9.1.4 SplaTAM配置
# configs/tum/splatam.py
scene_name = "freiburg1_room" # 第9行
basedir = "/home/jetson/aaa-dataset" # 第49行
# 迭代参数
tracking_iterations = 200
mapping_iterations = 309.2 运行命令
9.2.1 启动监控
# 启动tegrastats监控
tegrastats --interval 1000 --logfile algo_name.log &
# 查看监控状态
tegrastats9.2.2 运行算法
# MonoRTGS
cd ~/aaa-new-rtgs/MonoRTGS
source rtgs_venv/bin/activate
python3 slam.py --config configs/rgbd/tum/fr1_room.yaml
# MonoGS
conda activate MonoGS
cd ~/aaa-Mono-GS/MonoGS-main
python ./slam.py --config configs/rgbd/tum/fr1_room.yaml
# SGAD-SLAM
conda activate sgadslam
cd ~/aaa-SGAD-SLAM-new/SGAD-SLAM-main
python3 slam_single.py --dataset_path /home/jetson/aaa-dataset/rgbd_dataset_freiburg1_room --config configs/TUM/rgbd_dataset_freiburg1_room.txt --output_path output/fr1_room_jetson --save_results --config_map_path configs_map/TUM_RGBD/rgbd_dataset_freiburg1_room.yaml
# SplaTAM
conda activate splatam
cd ~/aaa-SplaTAM-main/SplaTAM-main
python scripts/splatam.py configs/tum/splatam.py9.3 结果文件位置
运行结果/
├── RTGS-SLAM-tum-room1/
│ └── RTGS_20260515_140113.log (监控日志)
├── MonoGS-SLAM-tum-room1/
│ ├── 2026-05-15-16-05-38/
│ │ ├── plot/ (轨迹文件)
│ │ └── stats_final.json (评估结果)
│ └── MonoGS_20260515_160541.log (监控日志)
├── SGAD-SLAM-tum-room1/
│ ├── rendering_metrics.json
│ ├── psnr.txt
│ └── SGAD-20260512_183515.log (监控日志)
├── SplaTAM-tum-room1/
│ ├── eval/ (PSNR、SSIM、LPIPS等)
│ └── Splatam_20260513_163723.log (监控日志)
└── 监控数据可视化/
├── RTGS_监控数据.png
├── MonoGS_监控数据.png
├── SplaTAM_监控数据.png
├── SGAD-SLAM_监控数据.png
├── 四算法监控数据对比.png
└── 运行时长对比.png9.4 可视化图表说明
9.4.1 单算法监控图表
每个算法的监控图表包含:
-
RAM使用量和使用率
-
CPU平均使用率
-
GPU频率使用率
-
CPU、GPU、SOC温度
-
SWAP使用量
-
统计摘要
9.4.2 对比图表
四算法监控数据对比:
-
归一化时间轴的资源使用对比
-
内存、CPU、GPU、温度的多维度对比
-
统计数据对比表
运行时长对比:
-
四算法运行时长柱状图
-
直观显示效率差异
参考文献
-
MonoRTGS: Real-Time Gaussian Splatting SLAM for Edge Devices, MICRO 2025
-
MonoGS: MonoGS: SLAM with Gaussian Splatting for Monocular, RGB-D and Stereo, CVPR 2024 Highlight
-
SGAD-SLAM: SLAM with Gaussian Abstraction and Differentiable Rendering for 3D Consistency, CVPR 2026
-
SplaTAM: Splat-SLAM: Splatted Object Tracking and Mapping, CVPR 2024
-
TUM RGB-D Dataset: J. Sturm et al., "A Benchmark for RGB-D Visual Odometry, 3D Reconstruction and SLAM", ICRA 2012
报告完成日期 : 2026年5月16日 实验地点 : NVIDIA Jetson AGX Orin 数据集: TUM RGB-D freiburg1_room
本报告详细记录了四种3DGS-SLAM算法在边缘设备上的性能对比实验,为边缘设备实时SLAM应用提供了算法选择指导和优化建议。
「2026 (MonoRTGS,MonoGS,SGAD-SLAM,SplaTAM)4算法运行结果」
/~72443Yb8hW~:/
链接:https://pan.quark.cn/s/6295f79fc01e