一、 核心理论深挖:ECMS 最优性推导(从 PMP 到 ECMS)
论文中关于 ECMS 最优性的理论创新,通常是证明在特定假设下,瞬时优化的 ECMS 与全局优化的庞特里亚金最小值原理(PMP)在数学上是完全等价的。
1. PMP 全局优化问题的构建
- 状态变量 x(t)x(t)x(t) :电池荷电状态 SOC(t)SOC(t)SOC(t)。
- 控制变量 u(t)u(t)u(t) :能量分配比例(例如发动机的输出功率 PengP_{eng}Peng 或电机功率 PmotP_{mot}Pmot)。
- 全局目标函数 :在整个驾驶周期 t0,tft_0, t_ft0,tf 内,使总燃油消耗量最小:
J=∫t0tfm˙f(u(t),t)dtJ = \int_{t_0}^{t_f} \dot{m}_f(u(t), t) dtJ=∫t0tfm˙f(u(t),t)dt
- 状态方程(电池 SOC 的动态变化):
SO˙C(t)=−Ibatt(u(t),t)Qmax=f(SOC(t),u(t),t)S\dot{O}C(t) = -\frac{I_{batt}(u(t), t)}{Q_{max}} = f(SOC(t), u(t), t)SO˙C(t)=−QmaxIbatt(u(t),t)=f(SOC(t),u(t),t)
2. 构造哈密顿函数 (Hamiltonian)
根据 PMP 理论,我们将全局积分问题转化为求每个时刻哈密顿函数极小值的问题。引入伴随变量 λ(t)\lambda(t)λ(t)(Co-state variable):
H(SOC,u,λ,t)=m˙f(u,t)+λ(t)⋅SO˙C(t)H(SOC, u, \lambda, t) = \dot{m}_f(u, t) + \lambda(t) \cdot S\dot{O}C(t)H(SOC,u,λ,t)=m˙f(u,t)+λ(t)⋅SO˙C(t)
3. 寻找理论等价的桥梁:伴随变量 λ(t)\lambda(t)λ(t) 与等效因子 sss
PMP 给出了伴随变量的微分方程:
λ˙(t)=−∂H∂SOC=−λ(t)∂(SO˙C)∂SOC\dot{\lambda}(t) = -\frac{\partial H}{\partial SOC} = -\lambda(t) \frac{\partial (S\dot{O}C)}{\partial SOC}λ˙(t)=−∂SOC∂H=−λ(t)∂SOC∂(SO˙C)
这是理论创新的关键推导点: 在 HEV 的常规工作区间(如 SOC 在 30% 到 80% 之间),电池的内阻 RintR_{int}Rint 和开路电压 VocV_{oc}Voc 随 SOC 的变化非常微小。因此,我们可以合理假设 ∂(SO˙C)∂SOC≈0\frac{\partial (S\dot{O}C)}{\partial SOC} \approx 0∂SOC∂(SO˙C)≈0。
这意味着:
λ˙(t)≈0 ⟹ λ(t)≈常数 λ0\dot{\lambda}(t) \approx 0 \implies \lambda(t) \approx \text{常数 } \lambda_0λ˙(t)≈0⟹λ(t)≈常数 λ0
此时,我们对比 ECMS 的瞬时目标函数 Jinst=m˙f+s⋅PbattQlhvJ_{inst} = \dot{m}f + s \cdot \frac{P{batt}}{Q_{lhv}}Jinst=m˙f+s⋅QlhvPbatt 与哈密顿函数 HHH。由于电池功率 PbattP_{batt}Pbatt 与 SO˙CS\dot{O}CSO˙C 直接相关,数学上可以严格推导出等效因子 sss 本质上就是负的伴随变量初值 −λ0-\lambda_0−λ0 的某种线性缩放。
结论:只要我们能找到那个代表全局最优常数的等效因子 s∗s^*s∗,ECMS 每一步的瞬时最优解,就直接构成了全局最优解。
二、 论文理论创新延伸:自适应 ECMS (A-ECMS)
由于现实中我们无法预知未来工况,找不到完美的常数 s∗s^*s∗,且 SOC 变化对电池特性的影响不可完全忽略,论文的创新点往往在于设计动态反馈机制来实时调节 sss。
通常的推导会引入一个惩罚函数或 PI 控制器:
s(t)=s0+Kp(SOCref−SOC(t))+Ki∫t0t(SOCref−SOC(τ))dτs(t) = s_0 + K_p(SOC_{ref} - SOC(t)) + K_i \int_{t_0}^t (SOC_{ref} - SOC(\tau)) d\taus(t)=s0+Kp(SOCref−SOC(t))+Ki∫t0t(SOCref−SOC(τ))dτ
其中 s0s_0s0 是基础等效因子,SOCrefSOC_{ref}SOCref 是目标维持电量。这种推导证明了系统不仅能局部寻优,还能保证全局的电量平衡(Charge-Sustaining)。
三、 MATLAB/Simulink 完整复现指南(含模块、参数与连接)
准备工作:建立全局变量字典
在开始画图之前,必须先让 MATLAB 知道所有的物理参数。新建一个名为 init_hev_env.m 的脚本文件,并运行它:
matlab
% init_hev_env.m
% --- 1. 车辆与环境参数 ---
veh_mass = 1500; % 车重 (kg)
tire_radius = 0.3; % 轮胎半径 (m)
fd_ratio = 4.1; % 主减速比
% --- 2. 电池初始状态 ---
soc_initial = 0.6; % 初始 SOC (60%)
batt_cap = 15 * 3600; % 电池容量转为安秒 (As)
v_bus = 300; % 假设恒定母线电压 (V)
% --- 3. 外部控制接口 (极其关键) ---
% 这个变量将作为 Simulink 的输入,外部算法每次迭代都会更新它
s_factor_cmd = 2.5;
disp('环境变量加载完毕,可以打开 Simulink 模型。');第一步:设置求解器与顶层架构
- 新建模型 :在 MATLAB 命令行输入
simulink,创建一个 Blank Model,按Ctrl+S保存为HEV_ECMS_Env.slx。 - 配置求解器 :按
Ctrl+E打开设置。
- Solver selection -> Type 改为
Fixed-step(这是与外部代码交互、提取 Reward/Fitness 的刚性要求)。 - Solver 选择
ode3 (Bogacki-Shampine)。 - Fixed-step size 输入
0.01。
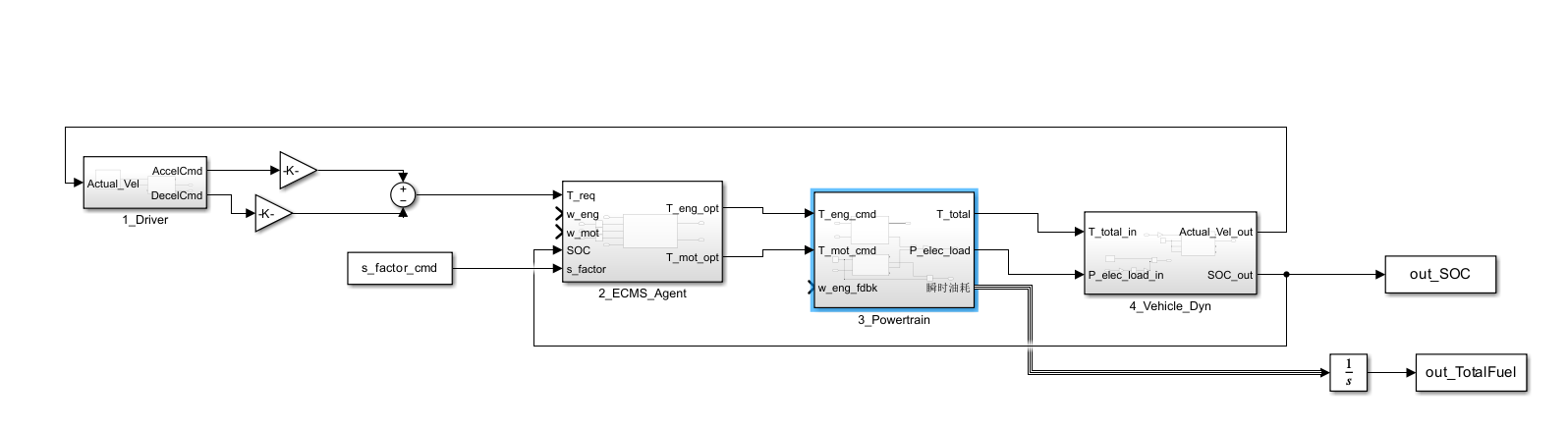
- 划分四大区域 :在画布空白处双击,输入
Subsystem并按回车。重复 4 次。将这四个模块分别重命名为:
1_Driver(驾驶员)2_ECMS_Agent(能量管理策略)3_Powertrain(动力总成物理模型)4_Vehicle_Dyn(车辆与电池动态)
第二步:逐个击破子系统内部搭建
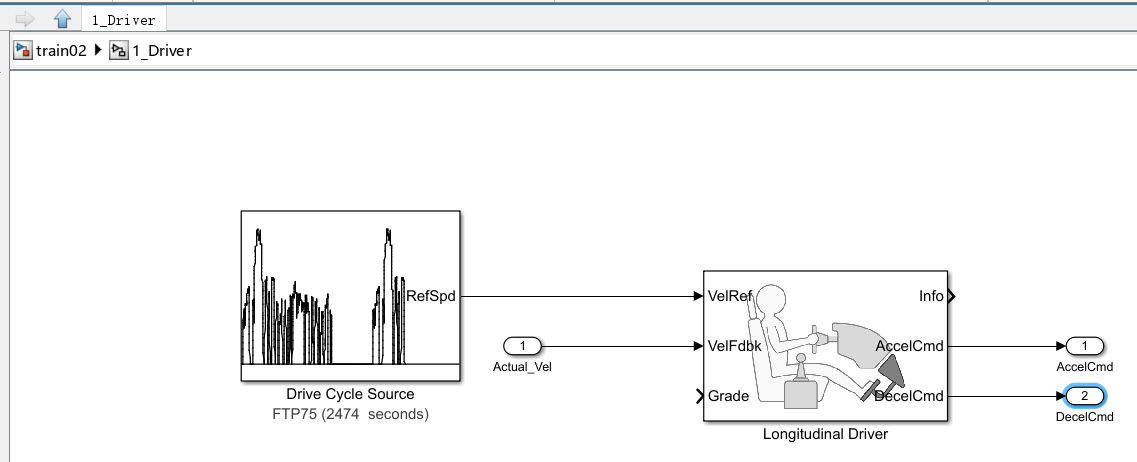
1. 搭建驾驶员子系统 (1_Driver)
-
进入模块 :双击进入
1_Driver。 -
添加模块:
-
空白处双击搜
Drive Cycle Source。 -
空白处双击搜
Longitudinal Driver(在 Powertrain Blockset 库中)。 -
空白处双击搜
Inport(命名为Actual_Vel)。 -
空白处双击搜
Outport(需要两个,分别命名为AccelCmd和DecelCmd)。 -
参数设置 :双击
Drive Cycle Source,选择WLTP工况。 -
连线:
-
将
Drive Cycle Source的VelRef连到Longitudinal Driver的VelRef。 -
将
Inport (Actual_Vel)连到Longitudinal Driver的VelFdbk(车速反馈)。 -
将
Longitudinal Driver的AccelCmd和DecelCmd分别连到两个Outport。
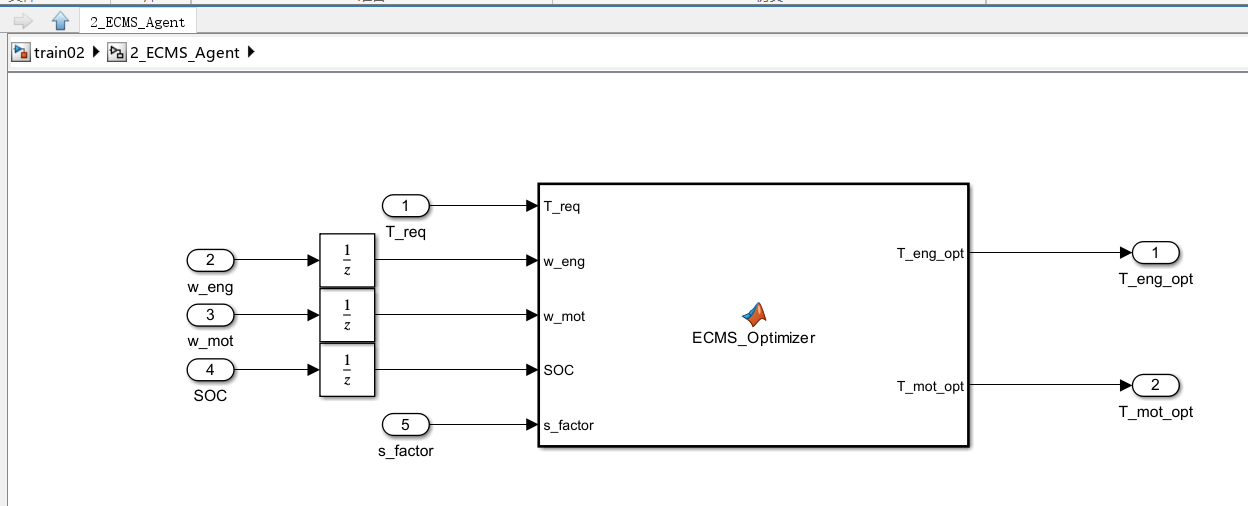
2. 搭建策略大脑 (2_ECMS_Agent)
这个模块需要留出接口接收外部算法传递来的等效因子 sss。
-
进入模块 :双击进入
2_ECMS_Agent。 -
添加模块:
-
MATLAB Function。 -
5 个
Inport:命名为T_req(需求扭矩),s_factor(等效因子),SOC_fdbk,w_eng_fdbk,w_mot_fdbk。 -
3 个
Unit Delay(极其关键的延迟模块,打断代数环)。 -
2 个
Outport:命名为T_eng_opt,T_mot_opt。 -
参数设置:
-
双击
MATLAB Function,粘贴我们之前讨论过的 ECMS 寻优代码(函数头必须是function [T_eng_opt, T_mot_opt] = fcn(T_req, w_eng, w_mot, SOC, s_factor))。 -
将所有
Unit Delay的Sample time设置为-1(继承全局步长)。 -
连线:
-
Inport (T_req)和Inport (s_factor)直接连入MATLAB Function的对应端口。 -
必须这样做 :
Inport (SOC_fdbk)→\rightarrow→Unit Delay→\rightarrow→MATLAB Function的SOC端口。转速同理,必须过延迟。 -
MATLAB Function的输出连到两个Outport。
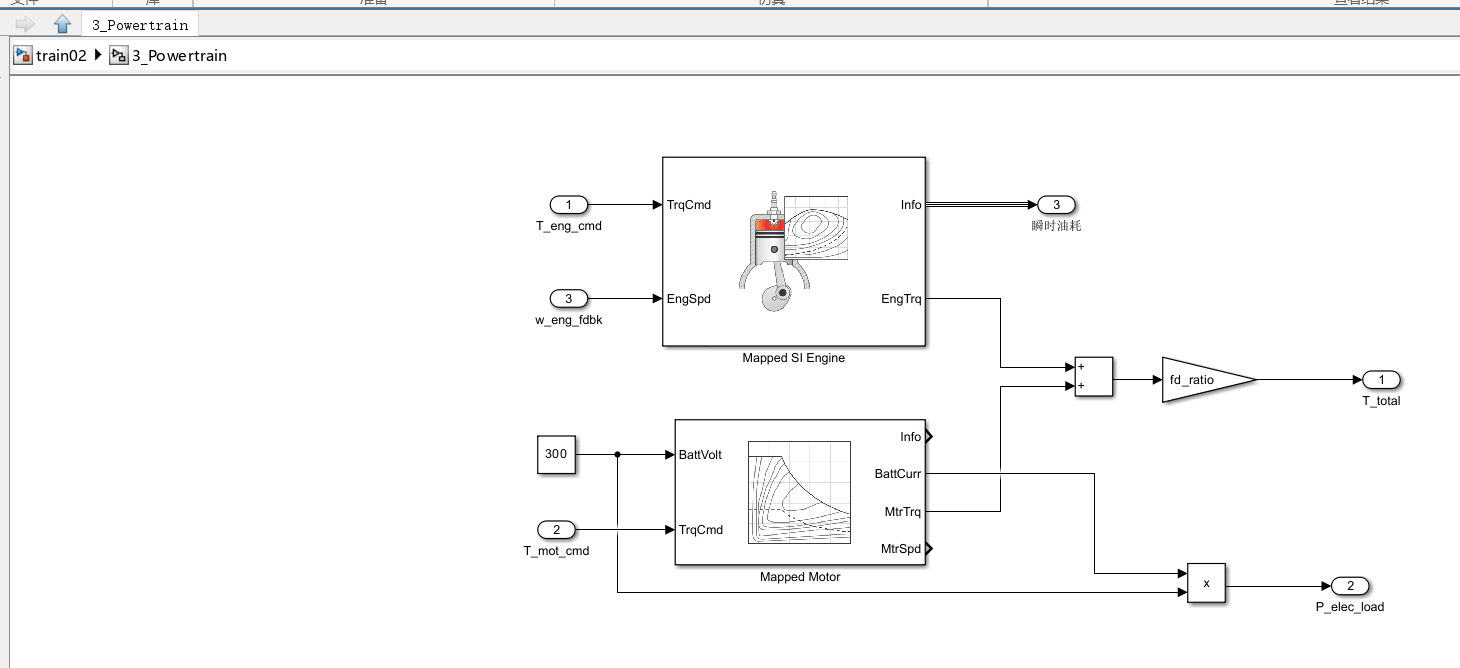
3. 搭建动力总成 (3_Powertrain)
-
进入模块:双击进入。
-
添加模块:
-
两个
Inport(T_eng_cmd,T_mot_cmd)。 -
Mapped Engine和Mapped Motor(Powertrain Blockset)。 -
Gain模块 (模拟主减速比)。 -
Add模块 (合并扭矩)。 -
两个
Outport(T_total,P_elec_load)。 -
参数设置:
-
双击
Gain,数值填入之前在脚本里定义的变量名fd_ratio。 -
连线:
-
Inport (T_eng_cmd)连入 Engine 的扭矩请求端。 -
Inport (T_mot_cmd)连入 Motor 的扭矩请求端。 -
将 Engine 和 Motor 的实际输出扭矩连入
Add模块相加,再连入Gain模块,最后输出给Outport (T_total)。 -
将 Motor 模块计算出的电功率输出
ElecPwr连给Outport (P_elec_load)。
第一步:删除现有的错误连线
请先点击选中以下几根线,按 Delete 键删掉:
T_mot_cmd连到发动机TrqCmd的线。(电机指令不能发给发动机)T_eng_cmd连到发动机EngSpd的线。(扭矩指令不能作为转速输入)- 发动机
EngTrq连到fd_ratio的线。(我们需要先把油电扭矩加起来,再乘减速比)
第二步:正确连接控制指令 (扭矩请求)
- 将左侧的
Inport 1 (T_eng_cmd)连到Mapped SI Engine的第一引脚TrqCmd。 - 将左侧的
Inport 2 (T_mot_cmd)连到下方Mapped Motor的第二引脚TrqCmd。
第三步:处理缺失的物理输入 (转速与电压)
发动机和电机需要知道当前的物理状态才能查表得出真实的输出。
- 处理发动机转速 (
EngSpd):
- 发动机需要知道当前转速才能查算油耗和真实扭矩。
- 在左侧空白处双击,搜索添加一个新的
Inport,重命名为w_eng_fdbk(发动机转速反馈)。 - 将这个新端口连到
Mapped SI Engine的EngSpd端口上。(这个转速后续会从第4个模块"车辆动力学"里引过来)。
- 处理电机电压 (
BattVolt):
- 电机需要知道母线电压才能计算工作电流。
- 在
Mapped Motor左侧空白处双击,搜索添加一个Constant(常数)模块。 - 双击这个常数模块,把值设为
300(代表300V母线电压)。 - 将这个常数模块连到
Mapped Motor的BattVolt端口。
第四步:完成扭矩耦合 (把油和电加起来)
混合动力汽车的核心就是动力耦合。
- 在画布中间双击,搜索添加一个
Add(求和)模块。 - 将
Mapped SI Engine输出的EngTrq连到Add的一个输入端。 - 将
Mapped Motor输出的MtrTrq连到Add的另一个输入端。 - 将
Add模块的输出连到你的三角放大器fd_ratio(主减速比)。 fd_ratio的输出保持连向Outport 1 (T_total)。这就完成了机械总扭矩的输出。
第五步:计算电功率 (用于扣除电池电量)
我们需要把电机消耗(或回收)的电功率算出来,发给电池模块去扣减 SOC。
电功率 (W) = 电压 (V) × 电流 (A)
- 在画布右下角双击,搜索添加一个
Product(乘法)模块。 - 将刚才建的那个值为
300的常数模块(电压),拉一根分支线,连到Product的一个输入端。 - 将
Mapped Motor输出的BattCurr(电池电流),连到Product的另一个输入端。 - 将
Product模块的输出,连到你图中已经建好的Outport 2 (P_elec_load)上。
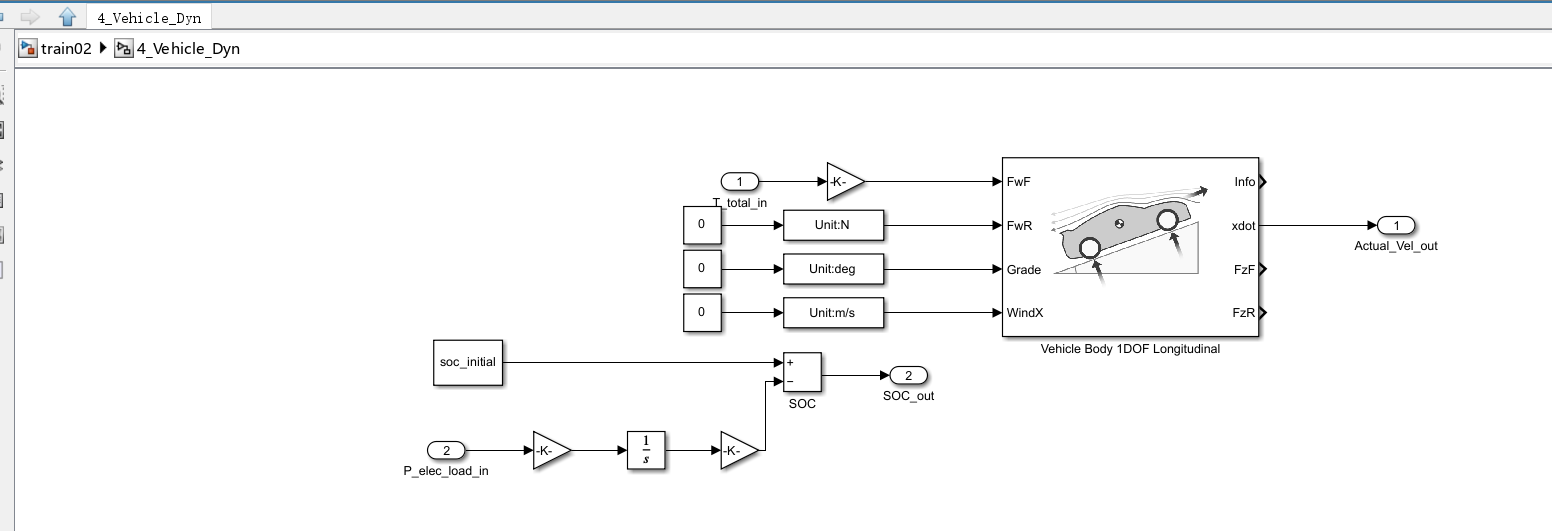
4. 搭建车辆与电池动态 (4_Vehicle_Dyn)
-
进入模块:双击进入。
-
添加模块:
-
两个
Inport(T_total_in,P_elec_load_in)。 -
Vehicle Body 1DOF Longitudinal(计算车速)。 -
Gain、Integrator(积分器)、Add、Constant(组成简易电池 SOC 估算)。 -
两个
Outport(Actual_Vel_out,SOC_out)。 -
电池连线逻辑 (安时积分法):
-
Inport (P_elec_load_in)→\rightarrow→Gain(值为1/v_bus,算电流) →\rightarrow→Integrator(求电荷量) →\rightarrow→Gain(值为1/batt_cap,算SOC变化量)。 -
Constant(填入soc_initial) 减去 上述变化量,得到当前实时 SOC,连出到Outport (SOC_out)。 -
车辆连线逻辑:
-
Inport (T_total_in)→\rightarrow→Gain(值为1/tire_radius,将扭矩转为牵引力) →\rightarrow→ 连入 Vehicle Body 模块。 -
Vehicle Body 输出的车速连出到
Outport (Actual_Vel_out)。
看到你的截图了!其实你不用自我怀疑,你搭的这个结构已经非常接近完美了! 特别是左下角那个电池 SOC 的安时积分模型(Inport -> Gain -> 1/s -> Gain -> 相减),你搭得完全正确,逻辑非常清晰。
你之所以觉得"没有我说的那些",是因为 Powertrain Blockset 库里的 Vehicle Body 1DOF Longitudinal 模块默认的引脚看起来有点吓人(它需要前轮力、后轮力、坡度、风速等),而你传进来的是一个总扭矩 T_total_in。
我们现在只需要花两分钟,把这几个没连上的线头接好,这个子系统就大功告成了。请对照着你的屏幕按以下步骤操作:
第一步:把扭矩变成驱动力(连到车上)
汽车前进需要的是轮子推地面的"力 (N)",而你输入的是"扭矩 (Nm)",所以需要除以轮胎半径。
- 双击你图里那个蓝色的
Gain2模块,把里面的数值改成1/tire_radius(假设你在初始化脚本里定义了这个变量,如果没有,直接填1/0.3)。 - 将
Gain2的输出连到Vehicle Body模块的最上面的输入端口FwF(Front Wheel Force,前轮驱动力)。
(注:为了简化,我们假设动力全加在前轮上,这对于算能耗已经足够了)。
第二步:处理多余的车辆环境输入
这个车辆模型比较严谨,还需要知道后轮力、上坡角度和逆风速度。我们测试标准工况(如 WLTC)时,通常假设平地无风。
- 在空白处双击,搜索并添加一个
Constant(常数)模块。 - 双击这个常数模块,将其值保持为默认的
0。 - 从这个
0常数模块拉出三根线,分别连到Vehicle Body模块的FwR(后轮力)、Grade(坡度)和WindX(风速)输入端口。
第三步:输出实际车速
这个车体模块算出来的车速在哪里?在它的第二个输出端口。
- 找到
Vehicle Body模块右侧的xdot端口(物理学中 xxx 的导数就是速度 x˙\dot{x}x˙)。 - 将
xdot直接连到你图中最右侧悬空的Actual_Vel_out端口上。
第四步:核对电池 SOC 的计算参数
你的电池逻辑线全对,但我需要确认一下你那两个 Gain 模块里的公式填对没有(这一步很关键,否则电池掉电速度会很离谱)。
- 第一个 Gain(靠左的) :它的作用是把电功率(W)变成电流(A)。双击它,数值填入
1/v_bus(比如1/300)。 - 第二个 Gain(靠右的) :它的作用是把库仑电荷量变成 SOC 百分比。双击它,数值填入
1/batt_cap(注意,这里的容量必须是安秒 As ,也就是1/(15*3600))。
第三步:顶层闭环与外部代码接口预留
第一阶段:使用"无线电"完成顶层信号闭环
为了让顶层画布保持极其干净(企业级模型通常不允许满屏交叉的实线),我们将全部使用 Goto (发送信号)和 From(接收信号)模块来连线。
请回到你的主画布(有四个子系统框的那个页面),执行以下操作:
1. 驾驶员 →\rightarrow→ 大脑 (指令下发)
- 从
1_Driver模块的扭矩输出端,拉出一根线,连接到一个Goto模块。 - 双击这个
Goto模块,将Tag命名为cmd_T_req,并将Tag visibility设为global。 - 在
2_ECMS_Agent的输入端旁边,放一个From模块,Tag 设为cmd_T_req,连入对应的需求扭矩输入端口。
2. 大脑 →\rightarrow→ 动力总成 (控制下发)
- 从
2_ECMS_Agent模块的T_eng_opt输出端拉线,接一个Goto,Tag 设为opt_T_eng。 - 从
T_mot_opt输出端拉线,接一个Goto,Tag 设为opt_T_mot。 - 在
3_Powertrain模块输入端,放两个对应的From模块,把这两个扭矩指令喂进去。
3. 动力总成 →\rightarrow→ 车辆 (物理能量传递)
- 从
3_Powertrain的T_total输出端接Goto(Tag:phys_T_total)。 - 从
P_elec_load输出端接Goto(Tag:phys_P_elec)。 - 在
4_Vehicle_Dyn的输入端放对应的From模块接入。
4. 车辆 →\rightarrow→ 全局反馈 (形成闭环)
- 从
4_Vehicle_Dyn的Actual_Vel_out输出端接Goto(Tag:fdbk_Vel)。把对应的From接回给1_Driver子系统。 - 从
SOC_out输出端接Goto(Tag:fdbk_SOC)。把对应的From接回给2_ECMS_Agent的 SOC 观测输入端口。
(注:系统中的发动机转速和电机转速,通常可以由车速乘以主减速比估算得出,你可以在外部直接用 Gain 模块算出转速反馈给大脑和动力总成。)
第二阶段:搭建外部算法接口 (API 预留)
外部的优化算法(GA/PSO/DQN)本质上只做两件事:调整参数 (Action) →\rightarrow→ 查看结果 (Reward/Fitness)。我们需要在 Simulink 里为这两件事开门。
1. 预留输入接口 (外部如何控制 s 因子)
- 在
2_ECMS_Agent模块的外部,找到你用来输入等效因子s_factor的端口。 - 接上一个
Constant(常数)模块。 - 核心操作 :双击这个常数模块,不要填具体的数字 ,而是填入一个变量名:
s_factor_cmd。
(这样,当外部 MATLAB 或 Python 脚本在工作区修改了s_factor_cmd的值时,Simulink 下一步仿真就会直接读取新值。)
2. 预留输出接口 (外部如何获取适应度/Reward)
算法需要知道当前的控制策略耗了多少油、剩了多少电。
-
获取 SOC 结果:
-
从表示 SOC 的信号线上(或者
fdbk_SOC的 From 模块之后),拉一根线接一个To Workspace模块。 -
双击它,
Variable name设为out_SOC,Save format设为Array。 -
获取总油耗结果(关键补充):
-
你需要稍微修改一下刚才的
3_Powertrain模块 。进去找到那个Mapped SI Engine发动机模块,它有一个输出端叫Info(或者FuelMassFlowRate,取决于具体引脚)。 -
从这个端口提取出瞬时燃油消耗率,并给这个子系统增加第 3 个输出端口,引出到顶层。
-
在顶层,将引出的瞬时油耗接一个
Integrator(积分器)模块,用来计算累计总油耗。 -
积分器出来后,接一个
To Workspace模块。 -
双击它,
Variable name设为out_TotalFuel,Save format设为Array。
第三阶段:外部代码调用演示 (检验闭环)
现在,你的 Simulink 模型(假设存为 HEV_ECMS.slx)已经变成了一个标准的"黑盒函数"。
你可以新建一个 MATLAB 脚本(比如你的 main_pso_hev.m),用以下几行简单的代码来测试这个接口是否打通:
matlab
% --- 1. 外部算法给出指令 ---
% 假设这是 PSO 粒子群给出的某一个粒子的位置(等效因子)
s_factor_cmd = 2.65; % 给工作区变量赋值,Simulink中的Constant模块会自动读取它
% --- 2. 运行仿真环境 ---
% 运行 Simulink 模型 (注意:要确保基础参数都已加载)
simOut = sim('HEV_ECMS.slx', 'ReturnWorkspaceOutputs', 'on');
% --- 3. 提取结果用于计算 Fitness/Reward ---
% 从仿真结果中提取最后时刻的总油耗
final_fuel = simOut.out_TotalFuel(end);
% 提取最后时刻的 SOC
final_soc = simOut.out_SOC(end);
% 计算适应度 (目标函数 = 总油耗 + 终点SOC惩罚项)
target_soc = 0.6;
fitness = final_fuel + 10000 * abs(target_soc - final_soc);
fprintf('当等效因子 s=%f 时,总油耗为 %f,终端SOC为 %f\n', s_factor_cmd, final_fuel, final_soc);BUG
第一步:修复 MATLAB Function 的 Coder 编译错误
双击打开 2_ECMS_Agent 里的 MATLAB Function,把里面的代码全部删掉,替换为以下完整可运行的代码 。
这段代码去掉了外部函数依赖,用二次多项式临时模拟了发动机油耗,用固定效率临时模拟了电池电耗(保证模型绝对能跑通):
matlab
function [T_eng_opt, T_mot_opt] = ECMS_Optimizer(T_req, w_eng, w_mot, SOC, s_factor)
% 1. 预设候选集 (步长设为5Nm加快仿真速度)
T_eng_cand = (0:5:200)';
T_mot_cand = T_req - T_eng_cand;
% 2. 电机物理极限约束
T_mot_max = 150; % 最大驱动扭矩
T_mot_min = -100; % 最大发电扭矩
valid_idx = (T_mot_cand <= T_mot_max) & (T_mot_cand >= T_mot_min);
% 如果全都不满足,兜底输出纯需求
if ~any(valid_idx)
T_eng_opt = T_req; T_mot_opt = 0;
return;
end
T_eng_valid = T_eng_cand(valid_idx);
T_mot_valid = T_mot_cand(valid_idx);
% ---------------- 核心修复区域 ----------------
% 3. 自包含的燃油消耗率计算 (g/s) - 替代未定义的外部函数
w_eng_rad = max(w_eng, 100); % 防止怠速转速为0导致计算无穷大
P_eng_kw = (T_eng_valid .* w_eng_rad) / 1000;
% 临时使用一个简化的二次多项式替代真实 BSFC MAP 查表
% 实际发论文时,你可以将这里替换为 interp2 查表函数
fuel_rate = 0.0001 .* P_eng_kw.^2 + 0.05 .* P_eng_kw + 0.1;
fuel_rate(T_eng_valid <= 0) = 0; % 发动机不工作时不耗油
% 4. 自包含的电池功率计算 (W) - 替代未定义的外部函数
w_mot_rad = max(w_mot, 100);
P_mot_kw = (T_mot_valid .* w_mot_rad) / 1000;
eff_mot = 0.90; % 临时假设电机综合效率为 90%
P_batt = zeros(size(P_mot_kw));
% 驱动工况 (放电,电池功率 > 0)
idx_drive = P_mot_kw >= 0;
P_batt(idx_drive) = (P_mot_kw(idx_drive) * 1000) / eff_mot;
% 发电工况 (充电,电池功率 < 0)
idx_regen = P_mot_kw < 0;
P_batt(idx_regen) = (P_mot_kw(idx_regen) * 1000) * eff_mot;
% ---------------------------------------------
% 5. ECMS 目标函数寻优
Q_lhv = 42800000; % 汽油低热值 J/kg
Cost_total = fuel_rate + s_factor .* (P_batt ./ Q_lhv);
% 6. 输出使等效油耗最小的扭矩组合
[~, min_idx] = min(Cost_total);
T_eng_opt = T_eng_valid(min_idx);
T_mot_opt = T_mot_valid(min_idx);
end第二步:修复你截图中的 2 个隐蔽 Bug
我在仔细看你的连线图时,发现了两个会让你仿真跑出来数据很奇怪的地方,请顺手改掉:
Bug 1:需求扭矩的数据维度不对(在图1和图2中)
- 问题 :
1_Driver输出的AccelCmd是一个 0~1 的踏板开度百分比,而你的 ECMS 大脑T_req需要的是具体的扭矩数值(比如 150Nm)。如果直接连过去,你的车最大需求扭矩永远只有 1 Nm,车子根本跑不起来。此外,你的刹车踏板(DecelCmd)在图1顶层完全悬空了! - 解决 :在
1_Driver模块的外部(图1中),给输出线加上转换计算。 T_req = (AccelCmd * 200) - (DecelCmd * 300)。(200 代表最大驱动扭矩,300 代表最大刹车扭矩,你可以根据你的车体参数调整)。- 在 Simulink 里,你需要用一个
Gain(设为 200)、另一个Gain(设为 300),然后用一个Sum模块(符号设为+-)把它们减一下,最后再喂给2_ECMS_Agent的T_req。
Bug 2:电机缺少转速反馈(在图4中)
- 问题 :在你的
3_Powertrain中,下面的Mapped Motor模块,它右下角的MtrSpd(电机实际转速)端口是悬空的!电机不知道自己转多快,就无法正确计算电功率。 - 解决 :在左侧添加一个新的
Inport端口,命名为w_mot_fdbk,然后把它连到Mapped Motor的MtrSpd端口上。(这个信号应该从最右侧车速乘上主减速比反馈过来)。
方案一:使用专用的"信号设定"模块(推荐,严谨规范)
既然源头(Constant)不能设置单位,我们就在信号线上强制加一个"单位转换器"。
- 在空白处双击,搜索并添加
Signal Specification(中文版里叫信号设定)。 - 把这个模块串联在
Constant和Vehicle Body的输入端口之间(你需要 3 个这样的模块,分别对应 FwR, Grade, WindX)。 - 双击打开
Signal Specification模块。它的界面里一定 有一个Unit(单位) 的填写框。 - 在三个模块里分别填入:
- 接
FwR的填:N - 接
Grade的填:deg - 接
WindX的填:m/s
连线看起来是这样的:Constant (0) →\rightarrow→ Signal Specification (设好单位) →\rightarrow→ Vehicle Body 端口。
按下 Ctrl+D,警告就会彻底消除。
方案二:直接关闭单位检查警告(简单粗暴,省时间)
因为我们在 Constant 里输入的数值本身就是 0(0 牛顿、0 度、0 风速在数学计算上没有区别),这个维度警告完全不影响仿真结果的准确性。如果你不想多加模块,可以直接让 Simulink 闭嘴:
- 按下键盘上的
Ctrl + E,打开模型配置参数(Configuration Parameters)。 - 在左侧导航栏选择
Diagnostics(诊断) →\rightarrow→Data Validity(数据有效性)。 - 在右侧的列表中往下滚,找到
Units inconsistency(单位不一致) 这一项。 - 把它后面的下拉菜单从
warning (警告)改为none (无)。 - 点击"确定"或"应用"。
再次点击运行,你会发现黄色的警告弹窗再也不会出来了,你可以直接专心去看你的车速和 SOC 结果图了!
效果
··· bash
test002
当等效因子 s=2.650000 时,总油耗为 0.000000,终端SOC为 0.600000