基本信息
论文题目: X-ICP: Localizability-Aware LiDAR Registration for Robust Localization in Extreme Environments
作者: Turcan Tuna, Julian Nubert, Yoshua Nava, Shehryar Khattak, Marco Hutter
期刊: IEEE Transactions on Robotics, 2024
研究方向: LiDAR SLAM、点云配准、ICP、退化检测、鲁棒定位
关键词: ICP Degeneracy、Localizability、Constrained ICP、Scan-to-map Registration、Extreme Environments
1. 论文主要内容
这篇论文提出了一种面向极端环境的 LiDAR 点云配准方法,叫做 X-ICP。它主要解决 LiDAR SLAM 中的一个经典问题:当机器人进入隧道、长走廊、大平面、空旷区域等几何信息不足的环境时,传统 ICP 容易在弱约束方向上发生漂移,导致定位失败或地图畸变。
传统 ICP 默认六自由度位姿都可以从当前点云匹配中被可靠估计。但在退化环境中,这个假设不成立。例如,机器人在长隧道中沿隧道方向前进时,当前 scan 沿隧道方向平移一小段,和地图仍然可能高度相似。此时 ICP 无法可靠判断机器人在该方向上的真实位移,优化结果容易被噪声、错误对应点或先验误差带偏。
X-ICP 的核心思想是:
先判断当前 ICP 优化问题在各个主方向上的可定位性,再根据可定位性对 ICP 更新进行约束。
它将每个优化方向分为三类:
full :该方向完全可定位,ICP 可以正常更新。
partial :该方向部分可定位,有少量有效信息,需要受控更新。
none:该方向不可定位,不允许 ICP 沿该方向更新,直接保留初始先验。
因此,X-ICP 并不是简单改进 ICP 的误差函数,而是让 ICP 在优化之前先"知道自己哪些方向可信,哪些方向不可信"。这也是这篇论文最重要的思想。
2. 论文解决的问题
LiDAR-based SLAM 的核心步骤通常是点云配准。常见做法是 scan-to-scan 或 scan-to-map registration。相比 scan-to-scan,scan-to-map 可以直接将当前点云和局部地图对齐,因此通常漂移更小。
但 ICP 存在一个重要局限:它依赖环境几何结构提供约束。
当环境缺少足够几何特征时,ICP 的 Hessian 会在某些方向上病态,优化问题变得 ill-conditioned。此时某些自由度无法从当前点云对应关系中被可靠估计。
论文中提到的典型退化环境包括:
- 隧道;
- 长走廊;
- 大面积平面;
- 窄门洞;
- 开阔区域;
- 地下矿井;
- 自然场景中的弱结构区域。
这些场景共同特点是:环境在某些方向上具有自相似性,导致点云配准无法区分真实运动和几何重复结构。
传统方法通常用 Hessian 最小特征值、condition number 或 Fisher information matrix 等指标判断退化。但这些方法往往有两个问题:
第一,依赖经验阈值。不同传感器、不同点云密度、不同场景尺度下,阈值很难统一。
第二,多数方法是二分类,只判断"退化"或"不退化",无法表达"还有少量有效信息"的中间状态。
X-ICP 正是围绕这两个问题提出的。
3. 论文创新点
3.1 从退化检测变成可定位性感知
很多已有方法关注 degeneracy detection,即判断 ICP 是否退化。但 X-ICP 更进一步,它关注 localizability awareness,也就是分析每个优化主方向到底有多可定位。
这点非常重要。因为退化通常不是全局发生的,而是方向相关的。
一个场景可能只在前进方向不可定位,但在侧向、高度和旋转方向仍然约束良好。如果用一个全局指标判断整个 ICP 是否退化,就会损失很多有效信息。
X-ICP 在六自由度上逐方向判断可定位性,因此可以更精细地处理退化。
3.2 在优化 eigenspace 中分析退化方向
环境退化方向不一定和机器人坐标轴对齐,也不一定和地图坐标轴对齐。例如,机器人斜着进入隧道时,隧道主方向可能同时包含地图坐标系中的多个分量。
X-ICP 不直接在固定坐标轴上判断退化,而是在 ICP Hessian 的 eigenspace 中分析可定位性。这样做的好处是:退化检测不依赖机器人当前朝向,也不依赖地图坐标系。
这比简单判断 (x,y,z,roll,pitch,yaw) 哪个方向退化更稳。
3.3 分离旋转和平移子空间
传统方法直接分析完整 6×6 Hessian,容易遇到一个问题:旋转和平移量纲不同,数值尺度也不同。一个统一的特征值阈值很难同时适用于平移和旋转方向。
X-ICP 将 Hessian 分成旋转子块和平移子块,分别进行特征分析:
,
这样可以避免旋转和平移尺度混杂,使 localizability 分析更稳定。
3.4 不直接依赖 Hessian 特征值,而是分析对应点贡献
X-ICP 虽然使用 Hessian eigenspace,但并不直接用 eigenvalue 作为最终判断依据。原因是 eigenvalue 会受到点云数量、点云密度、环境尺度和传感器配置影响。
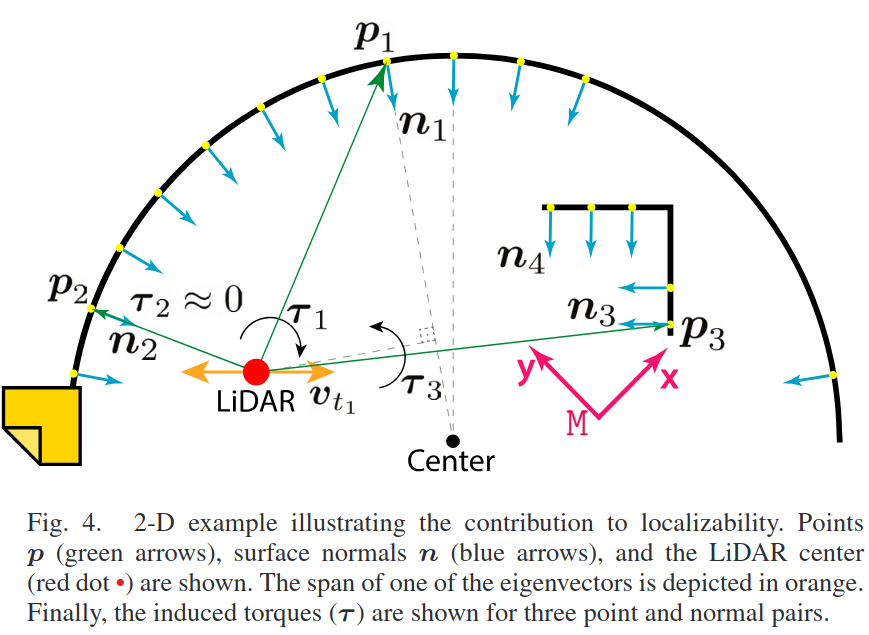
它真正分析的是每个点-法向量对应关系对某个优化方向的贡献。
对于 point-to-plane ICP,一个对应点的约束主要来自:
平移部分:法向量 ();
旋转部分:力矩项 ()。
论文用类似 wrench system 的思想来解释这个问题。法向量决定该点对平移方向的约束,点的位置和法向量叉乘决定该点对旋转方向的约束。
然后,X-ICP 将这些贡献投影到 Hessian 的主方向上,从而得到每个对应点对每个优化方向的 localizability contribution。
3.5 引入 partial localizability
这是这篇论文最值得借鉴的设计。
传统方法通常只有两类:可定位或不可定位。
但真实环境中,很多方向并不是完全可定位,也不是完全不可定位,而是存在少量有效约束。
X-ICP 增加了 partial 类别。
对于 partial 方向,系统不会完全相信 ICP,也不会完全冻结该方向,而是从对应点中筛选出贡献最大的点,用这些点计算一个受控更新量。
这可以理解为:
- full:相信 ICP;
- none:相信先验;
- partial:只相信高质量对应点提供的有限信息。
这种三分类比二分类更符合真实机器人场景。
3.6 将可定位性直接放入 ICP 底层优化
很多退化感知方法是在 ICP 求解完成后,对优化结果做后处理。例如将结果投影到非退化方向。但如果 ICP 在退化方向上已经发散,后处理未必能完全纠正。
X-ICP 的做法更直接:它将可定位性结果转化为等式约束,直接加入 ICP 优化问题中。
原始 ICP 问题是:
X-ICP 将其改成:
,
这样,退化方向在求解阶段就被限制住,而不是等优化出错后再修正。
4. 方法详解
4.1 ICP 基础模型
论文使用 point-to-plane ICP。
对于 scan 中的点 (),地图中的对应点为 (
),对应点法向量为 (
)。ICP 优化目标为:
该误差表示变换后的 scan 点到地图局部平面的距离。
线性化后,优化变量为:
其中 () 是旋转增量,(
) 是平移增量。优化问题可以写为:
当环境几何约束充分时,这个问题可以稳定求解。
但当某些方向缺少约束时,() 会病态,导致 ICP 在这些方向上的更新不可靠。
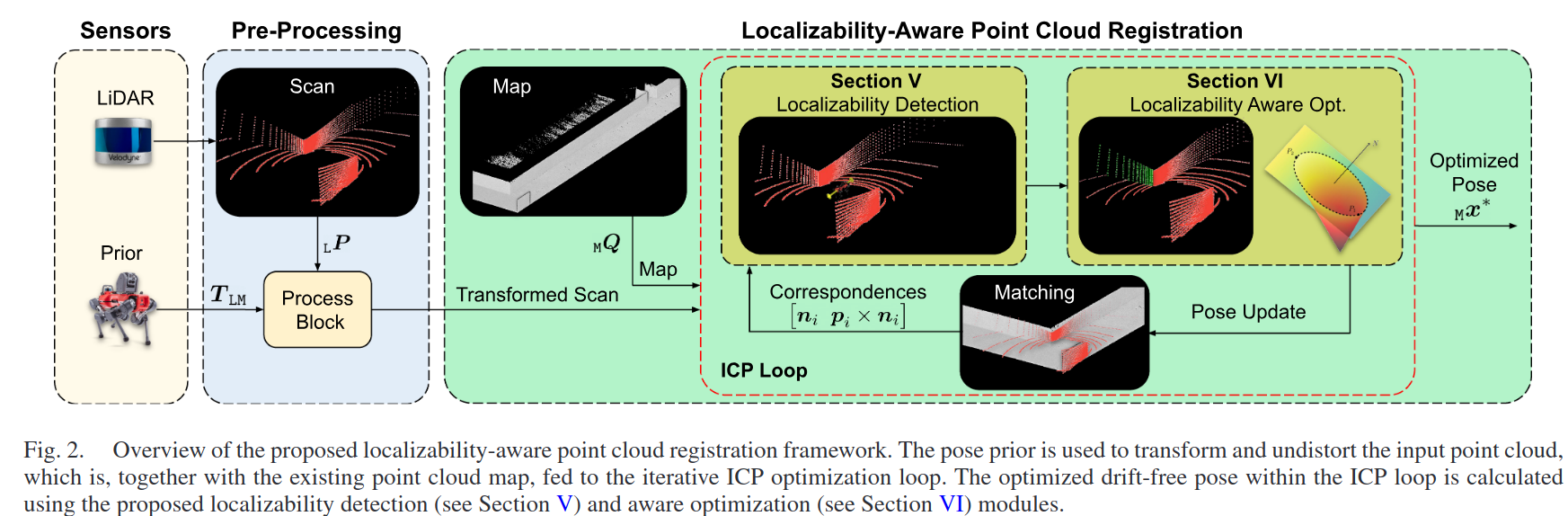
4.2 Localizability Detection Module
Loc.-Module 的目标是判断每个优化主方向是否可定位。
X-ICP 定义了 localizability vector:
每个主方向都会被独立分类。
首先,系统从 ICP Hessian 中提取旋转和平移子块:
然后分别做特征分解,得到旋转和平移主方向:
接着,系统分析每个点-法向量对应关系对这些主方向的贡献。
平移贡献来自法向量:
旋转贡献来自归一化后的力矩项:
然后将它们投影到 eigenspace:
得到的 () 就表示对应点对各个优化方向的贡献。
值越接近 1,说明该对应点越能约束该方向;值越接近 0,说明几乎没有约束。
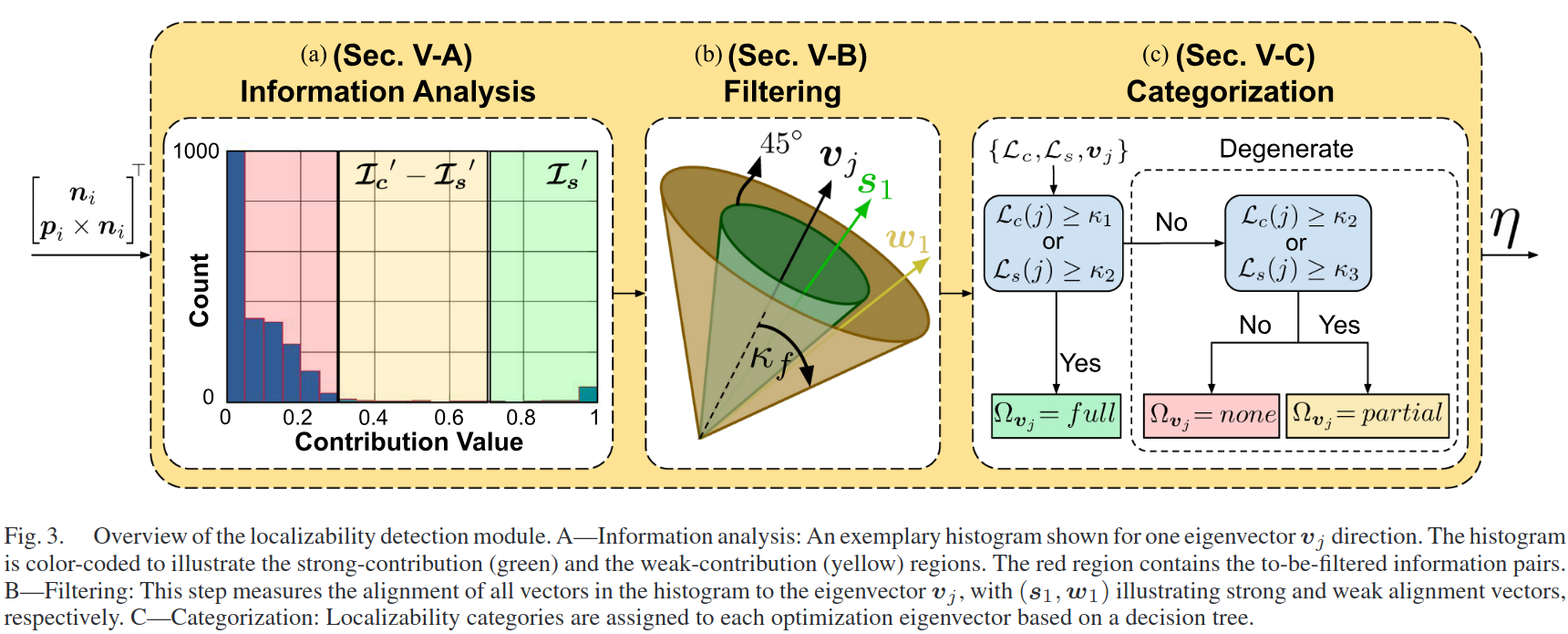
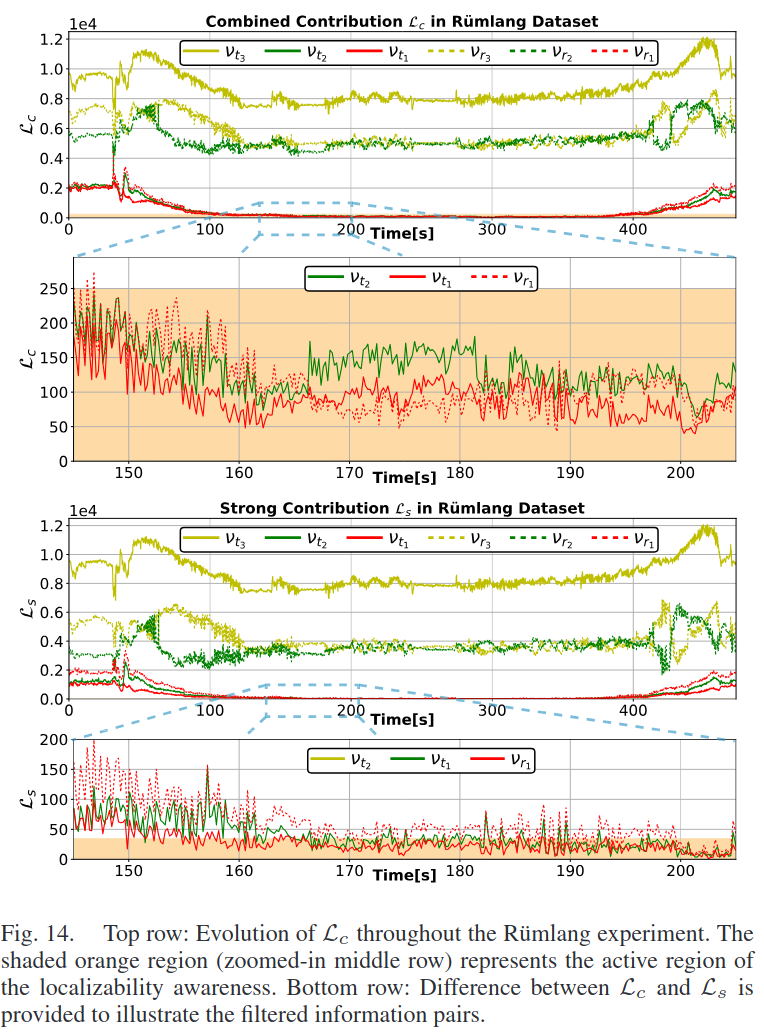
4.3 Filtering:过滤低贡献信息
贡献度计算完成后,X-ICP 会过滤低贡献项。
原因是低贡献项可能和传感器噪声、法向量估计误差混在一起,直接参与判断会影响稳定性。
论文使用两个统计量:
其中 () 表示可靠贡献总量,(
) 只统计强贡献。
强贡献通常指与主方向夹角小于 () 的信息。
这样,系统不仅知道"总体有多少贡献",还知道"是否存在足够强的约束结构"。
4.4 Categorization:三分类判断
论文使用三个阈值:
判断逻辑可以理解为:
- 如果可靠贡献或强贡献足够多,则为 full;
- 如果贡献不足以 full,但仍有一定有效信息,则为 partial;
- 如果贡献太少,则为 none。
这个分类过程是逐个 eigenvector 进行的,因此 X-ICP 可以判断每个优化主方向的局部可定位性。
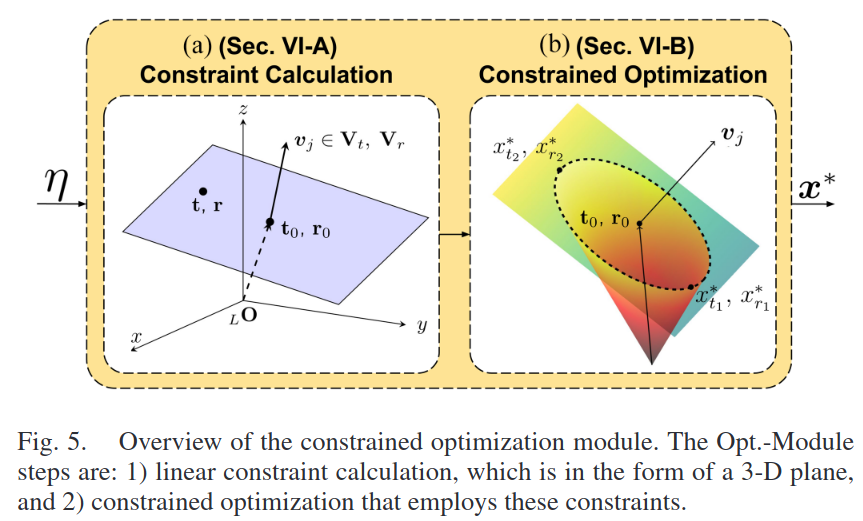
4.5 Localizability-Aware Optimization Module
Opt.-Module 根据 Loc.-Module 的结果构造约束。
- 对于 full 方向:
不加约束,ICP 正常更新。
- 对于 none 方向:
该方向更新量设为 0,保持初始先验不变。
- 对于 partial 方向:
从对应关系中重新采样贡献最高的点,计算受控更新量。
约束形式为:
其中 () 是主方向,(
) 是该方向允许的更新量。
如果是 none 方向,则 () 或 (
) 为 0。
如果是 partial 方向,则 () 或 (
) 由高贡献对应点求解得到。
最终,X-ICP 将这些约束写成:
然后求解约束最小二乘问题:
,
论文使用拉格朗日乘子将其转换为增广线性系统,并通过 SVD 求解。
5. 实验结果
论文在仿真和真实环境中验证 X-ICP。
5.1 仿真实验
仿真环境包括:
- 半圆隧道,用于测试平移退化;
- 圆柱房间,用于测试旋转退化;
- 走廊加开放区域,用于测试混合退化。
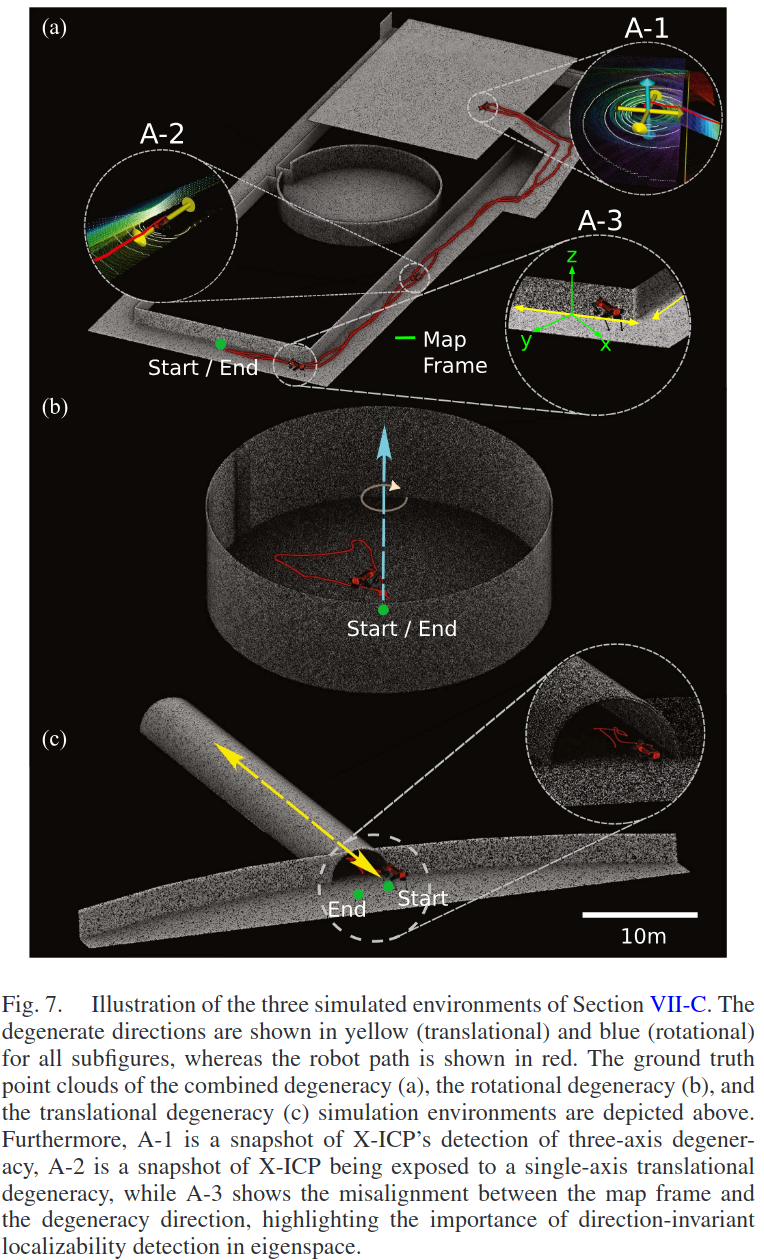
实验结果显示,X-ICP 能更准确地识别退化方向。相比 Zhang et al. 方法,X-ICP 不容易因为点云数量和 Hessian 特征值变化产生错误判断。相比 Hinduja et al. 方法,X-ICP 不会过于悲观地完全依赖先验。
尤其在混合退化场景中,X-ICP 能区分走廊段的一轴退化和开放区域的多轴退化,并通过 partial localizability 减小地图误差。
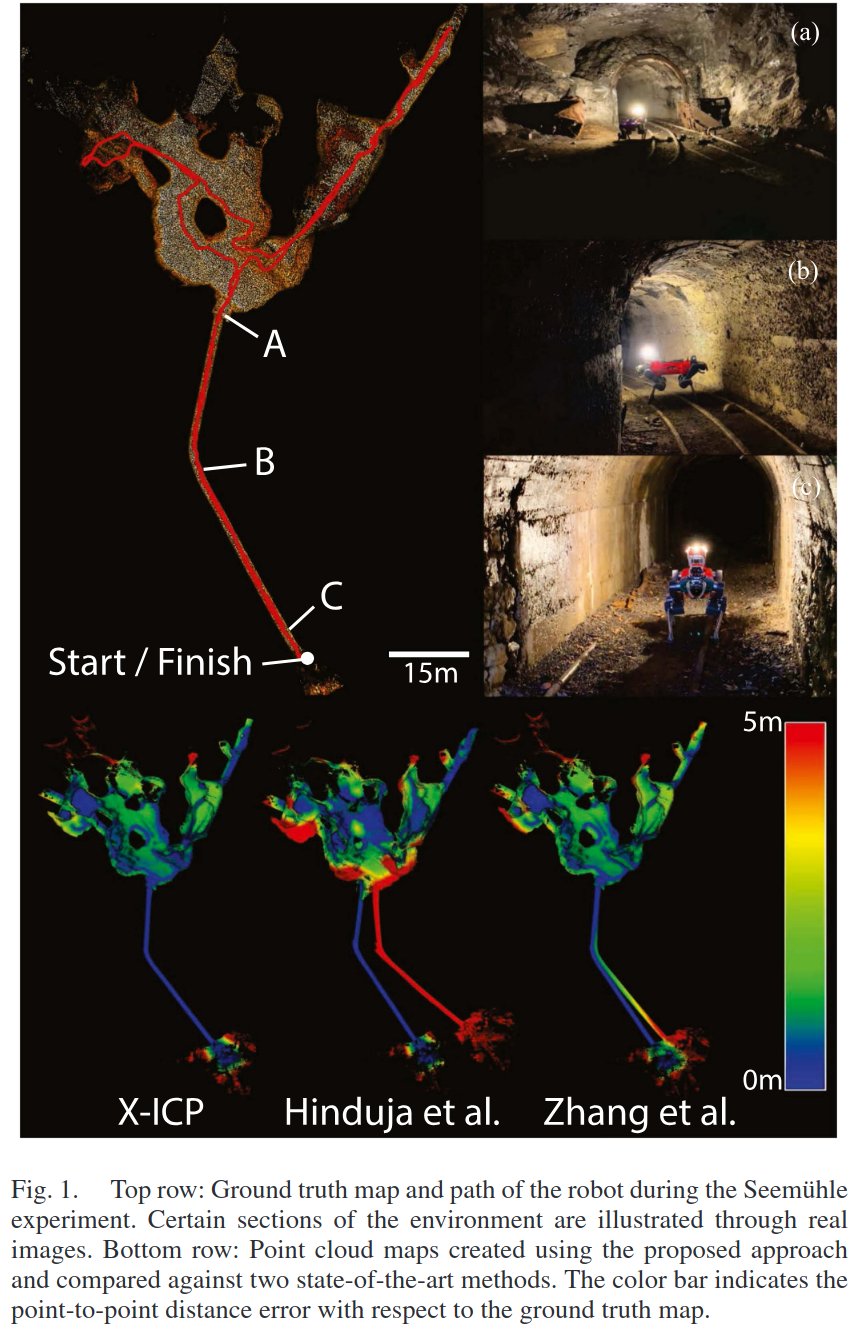
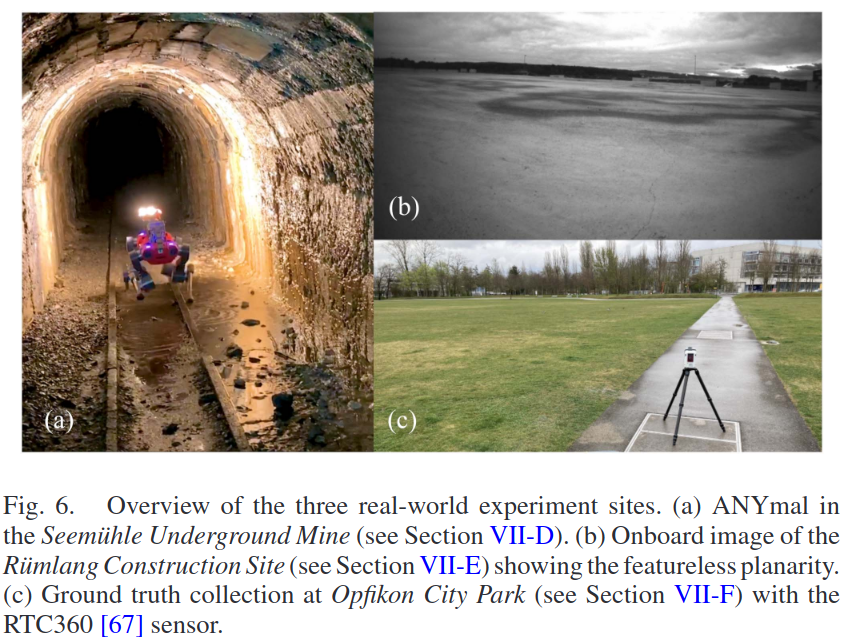
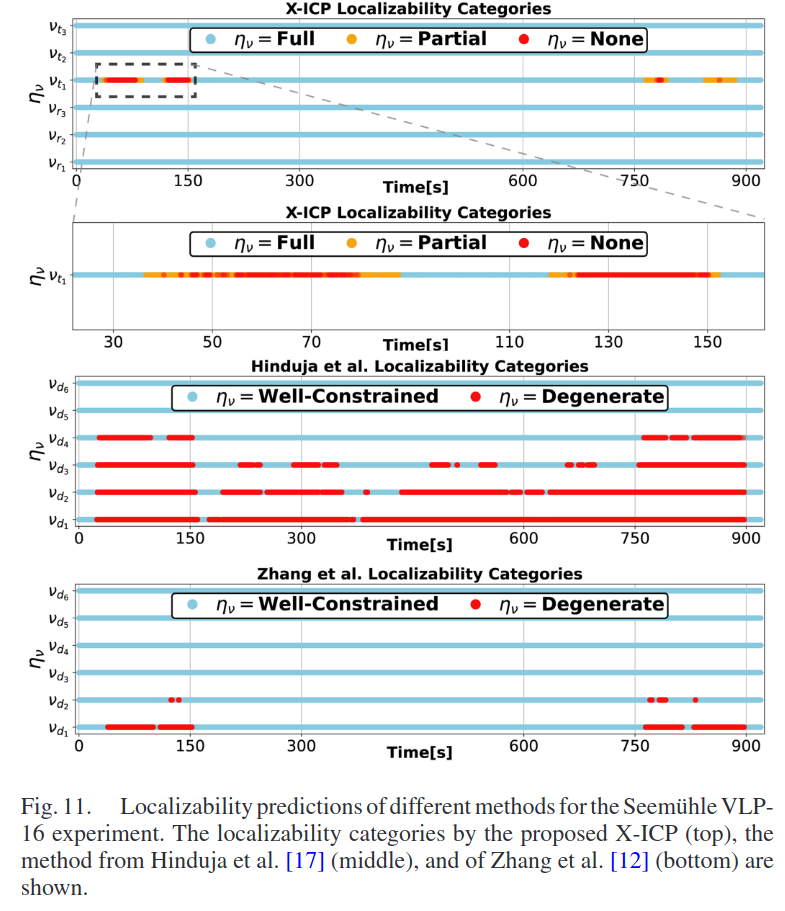
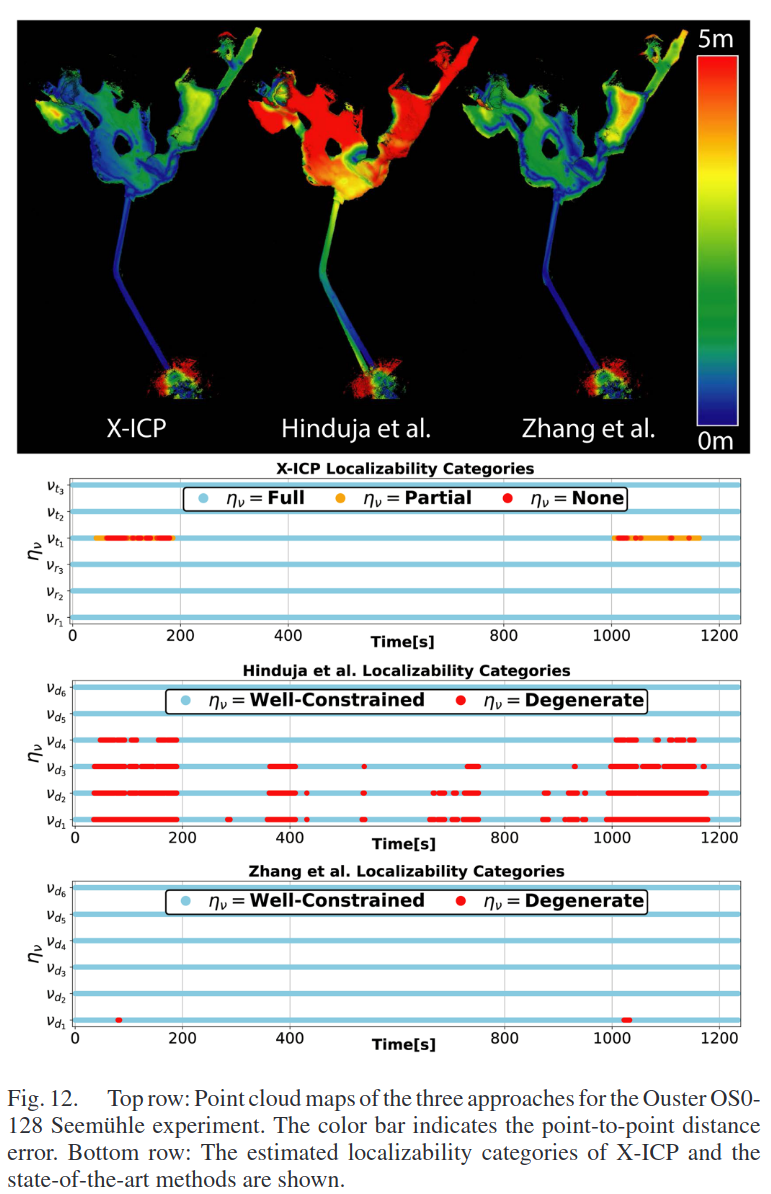
5.2 地下矿井实验
Seemühle 地下矿井是论文中最有代表性的真实实验。
ANYmal 机器人在地下矿井中行走 521.8 m。该环境包括不平整地面、轨道、石块和长隧道。
这个场景很难,因为:
- 地面不平会影响腿式里程计先验;
- 隧道沿主方向几何自相似,LiDAR 容易退化;
- 长距离运行会放大漂移。
结果显示,Zhang et al. 方法在返回隧道时退化检测错误,产生 LiDAR slip。Hinduja et al. 方法过于保守,过度依赖噪声较大的腿式里程计先验。X-ICP 能稳定识别隧道方向的退化,并在弯曲隧道处利用 partial 信息,因此生成的地图误差更低。
5.3 施工场地实验
Rümlang 施工场地是大面积平坦开放环境。
该场景主要在地面平移方向和垂直旋转方向上退化。
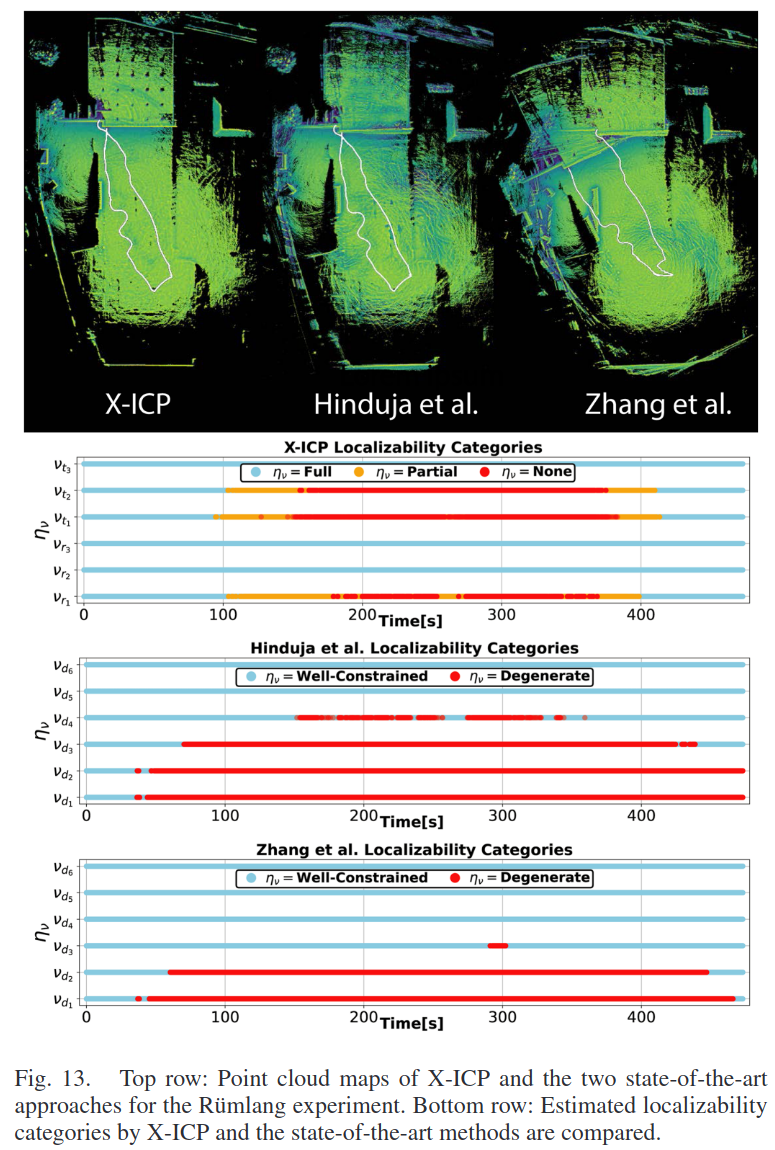
实验中,机器人还进行了原地旋转,这对 yaw 估计提出了更高要求。
结果显示,Zhang et al. 方法由于依赖统一 eigenvalue 阈值,难以同时处理旋转和平移尺度差异。Hinduja et al. 方法偏保守,在平地上依赖腿式里程计时表现尚可,但地图细节仍有模糊。X-ICP 能正确检测退化方向,并生成更一致的地图。
5.4 公园自然环境实验
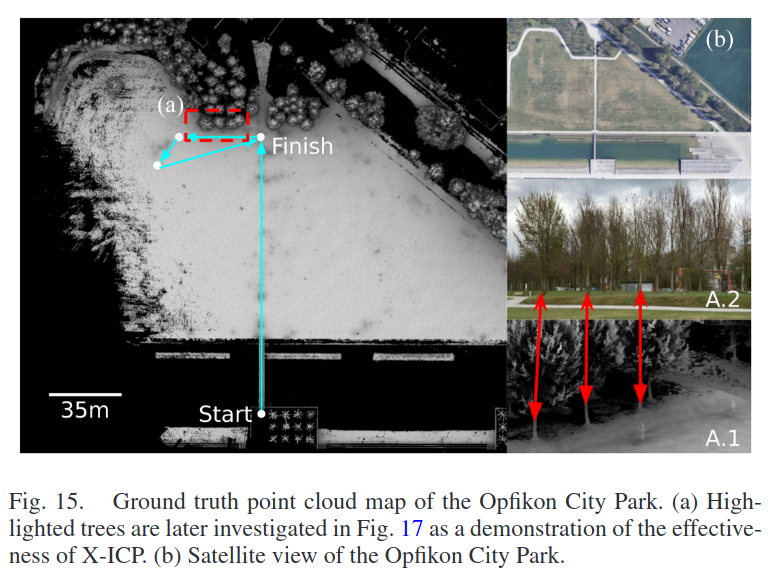
Opfikon 公园实验用于验证自然环境中的适用性。
该场景包括软地面、悬索桥、树木和开放区域。
软地面会影响腿式里程计先验,植被会影响法向量估计,开放区域则会造成 LiDAR 退化。
实验结果显示,X-ICP 在树木区域和开放区域都能保持更好的地图细节。Zhang et al. 方法需要重新调阈值,即使调参后仍然能看到退化影响。Hinduja et al. 方法仍然偏悲观,在先验噪声较大时会引入明显漂移。
5.5 消融实验
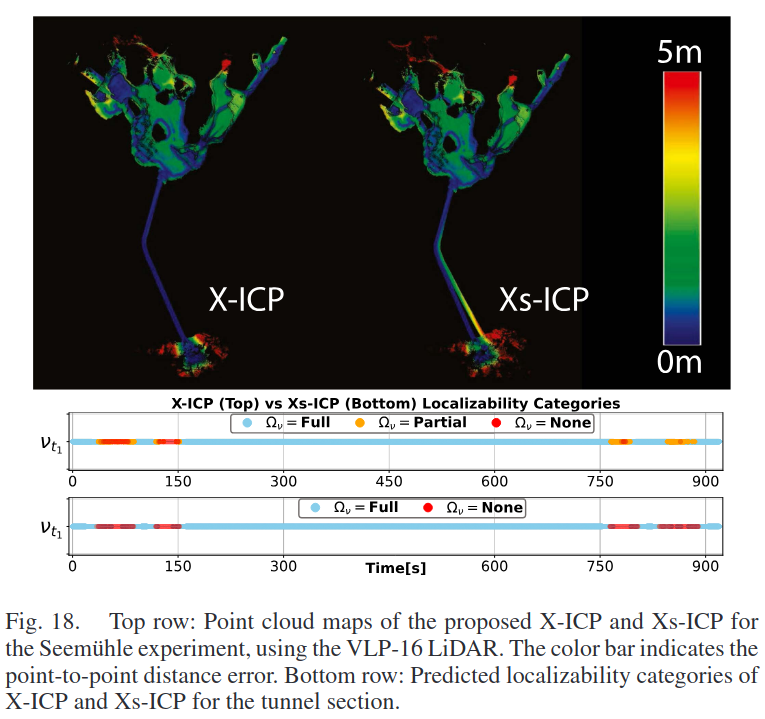
论文提出一个简化版本 Xs-ICP。
Xs-ICP 去掉 partial 类别,只保留 full 和 none 二分类。
实验结果显示,去掉 partial 后,系统在地下矿井中产生更大的漂移;在施工场地中,墙体点云出现重复,说明旋转估计存在误差。
这说明 partial localizability 不是可有可无的设计。
真实环境中,很多方向确实处于"部分可定位"的状态。如果直接当作 none,会浪费有效信息;如果直接当作 full,又容易被噪声带偏。
6. 值得借鉴的地方
6.1 逐方向判断传感器约束是否可靠
这篇论文最大的启发是:
SLAM 系统不应该默认一次 scan matching 得到的六自由度结果都同样可信。
在实际系统中,不同方向的约束强度经常不同。
例如,LiDAR 在隧道中对横向和高度约束很好,但对前进方向约束弱;在平坦开放场地中,平面内平移和 yaw 可能约束弱。
因此,一个鲁棒系统应该逐方向判断约束强度,而不是对整个传感器结果设置一个统一权重。
6.2 不要直接迷信 Hessian 特征值
Hessian 特征值是常用退化指标,但它容易受点云数量、传感器线数、环境尺度和量纲影响。
X-ICP 从 Jacobian 和几何约束本身出发,分析每个点-法向量对优化方向的贡献。这个思路比单纯看特征值更可解释,也更容易定位问题来源。
6.3 三分类比二分类更适合真实环境
很多机器人感知问题不是"可靠 / 不可靠"二选一,而是存在大量中间状态。
X-ICP 的 full / partial / none 设计非常实用。
这个思想可以迁移到其他方向,例如:
- 视觉 SLAM 中的特征分布退化;
- VIO 中的 yaw 或 scale 可观性分析;
- LIO 中 LiDAR factor 的方向性置信度;
- 多传感器融合中的 partial factor;
- 弱 GNSS 场景中的方向性约束建模。
6.4 将退化信息直接放入底层优化
X-ICP 不是等 ICP 结果出来后再修正,而是在优化求解时就加入约束。这种设计更主动,也更稳定。
对于容易发散的优化问题,后处理通常不够。
如果可以在优化阶段限制不可靠自由度,系统会更鲁棒。
7. 局限性
7.1 仍然依赖较好的初始位姿
X-ICP 不能解决初始位姿很差的问题。
如果 initial guess 错误,对应点搜索就会错误;而在 none 方向上,X-ICP 会保留初始先验,如果先验本身错了,该方向结果也会错。
因此,X-ICP 更适合作为已有 odometry 或 state estimator 的增强模块,而不是完全独立的定位方案。
7.2 参数仍然和传感器噪声有关
论文虽然减少了环境相关调参,但过滤阈值 () 仍然和传感器噪声有关。Velodyne 和 Ouster 使用了不同设置。
所以 X-ICP 不是完全无参数方法。
它更准确的说法是:降低了对环境相关阈值的依赖,但仍需要考虑传感器噪声和法向量估计质量。
7.3 主要适用于 point-to-plane ICP
X-ICP 的推导基于 point-to-plane ICP。
如果换成 GICP、NDT、surfel-based registration 或学习型配准方法,贡献度计算和约束形式需要重新推导。
因此,它的思想可以迁移,但公式不能直接套用到所有点云配准框架。
7.4 法向量质量会影响 localizability 判断
X-ICP 依赖点-法向量对应关系。
如果环境中有大量植被、动态物体、稀疏点云或噪声边界,法向量估计可能不稳定,进而影响贡献度计算。
7.5 没有解决全局 SLAM 问题
X-ICP 主要解决局部 scan-to-map registration 的退化问题。
它没有重点处理闭环、重定位、动态环境、长期地图变化等问题。因此它不是完整 SLAM 系统,而是一个鲁棒点云配准模块。
8. 总结
X-ICP 是一篇非常值得学习的 LiDAR SLAM 论文。它解决的问题很具体:ICP 在几何退化环境中会沿弱约束方向漂移。它的解决思路也很清晰:先判断每个优化主方向的可定位性,再将这个判断转化为 ICP 优化约束。
这篇论文最重要的技术点可以概括为:
-
在 ICP eigenspace 中逐方向分析 localizability;
-
分离旋转和平移子空间,避免量纲差异影响;
-
不直接依赖 Hessian eigenvalue,而是分析对应点的几何贡献;
-
将方向状态分为 full、partial、none 三类;
-
对不可定位方向冻结更新,对部分可定位方向进行受控更新;
-
将可定位性约束直接加入底层 ICP 优化,而不是优化后再修正。
我的理解是,X-ICP 的核心价值不在于提出了一个新的 ICP cost function,而在于提出了一种"知道什么时候该相信 ICP,什么时候不该相信 ICP"的机制。
对于真实机器人系统,这一点非常重要。
在隧道、矿井、施工场地、公园等复杂环境中,传感器并不是完全失效,而是某些方向失效、某些方向仍然有效。X-ICP 的贡献就在于把这种方向性差异显式建模,并反馈到优化求解中。
所以,这篇论文最值得借鉴的思想是:
不要把一次点云配准结果当成六自由度都同样可信,而要逐方向分析可定位性,并让优化过程主动规避退化方向的错误更新。
从工程角度看,X-ICP 很适合作为现有 LiDAR odometry、LIO 或多传感器融合定位系统的增强模块。它不能替代一个好的初始位姿估计器,也不能解决所有全局 SLAM 问题,但它能显著提升系统在几何退化环境中的鲁棒性。