目录
[4.1 上层模型------集群间功率分配](#4.1 上层模型——集群间功率分配)
[4.2 下层模型------集群内功率分配](#4.2 下层模型——集群内功率分配)
[4.3 Q学习与PCA协同控制](#4.3 Q学习与PCA协同控制)
[4.4 牵制一致性算法(PCA)](#4.4 牵制一致性算法(PCA))
[4.5 Q学习与PCA的融合机制](#4.5 Q学习与PCA的融合机制)
✨1.课题概述
随着分布式光伏发电大规模接入配电网,光伏出力的间歇性和不确定性导致配电网电压越限问题日益严重。传统集中式调度方法在面对海量分布式光伏电源时,存在通信负担重、计算复杂度高、实时性差等瓶颈。为此,本文提出基于Q学习和牵制一致性算法(Pinning Consensus Algorithm, PCA)的分布式光伏集群优化调度策略,通过强化学习智能决策与多智能体协同控制的有机融合,实现光伏集群对配电网的高效支撑。
该策略的核心思想包含三个层面:集群划分层利用动态时间弯曲(DTW)算法结合节点电气距离与电压灵敏度进行合理分群;集群间调度层建立双层优化模型,采用逃生优化算法求解各集群功率指令;集群内控制层将Q学习与PCA相结合,实现分布式光伏单元的协同响应。这种分层分群架构有效降低了问题维度,提升了调度的实时性与鲁棒性。
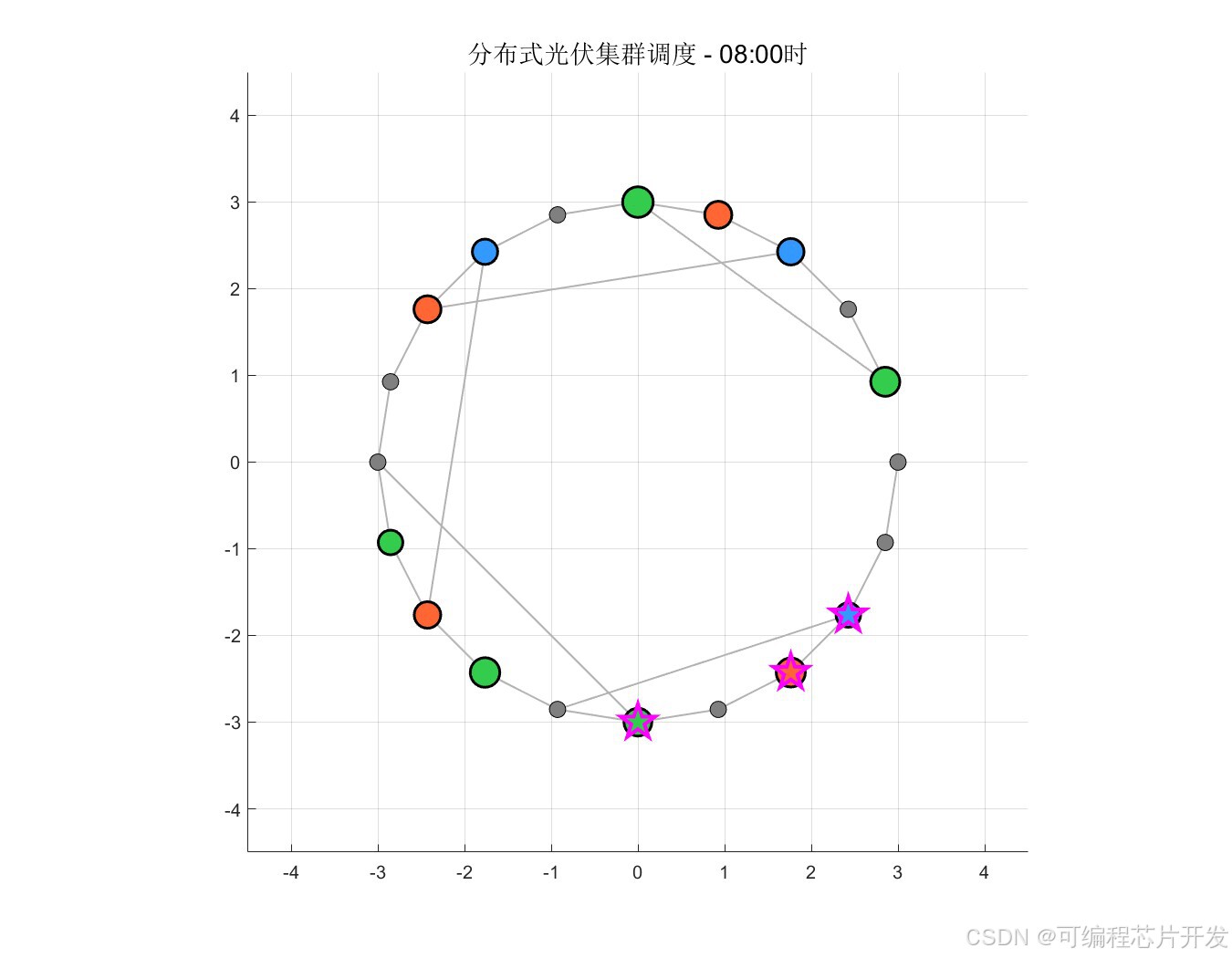
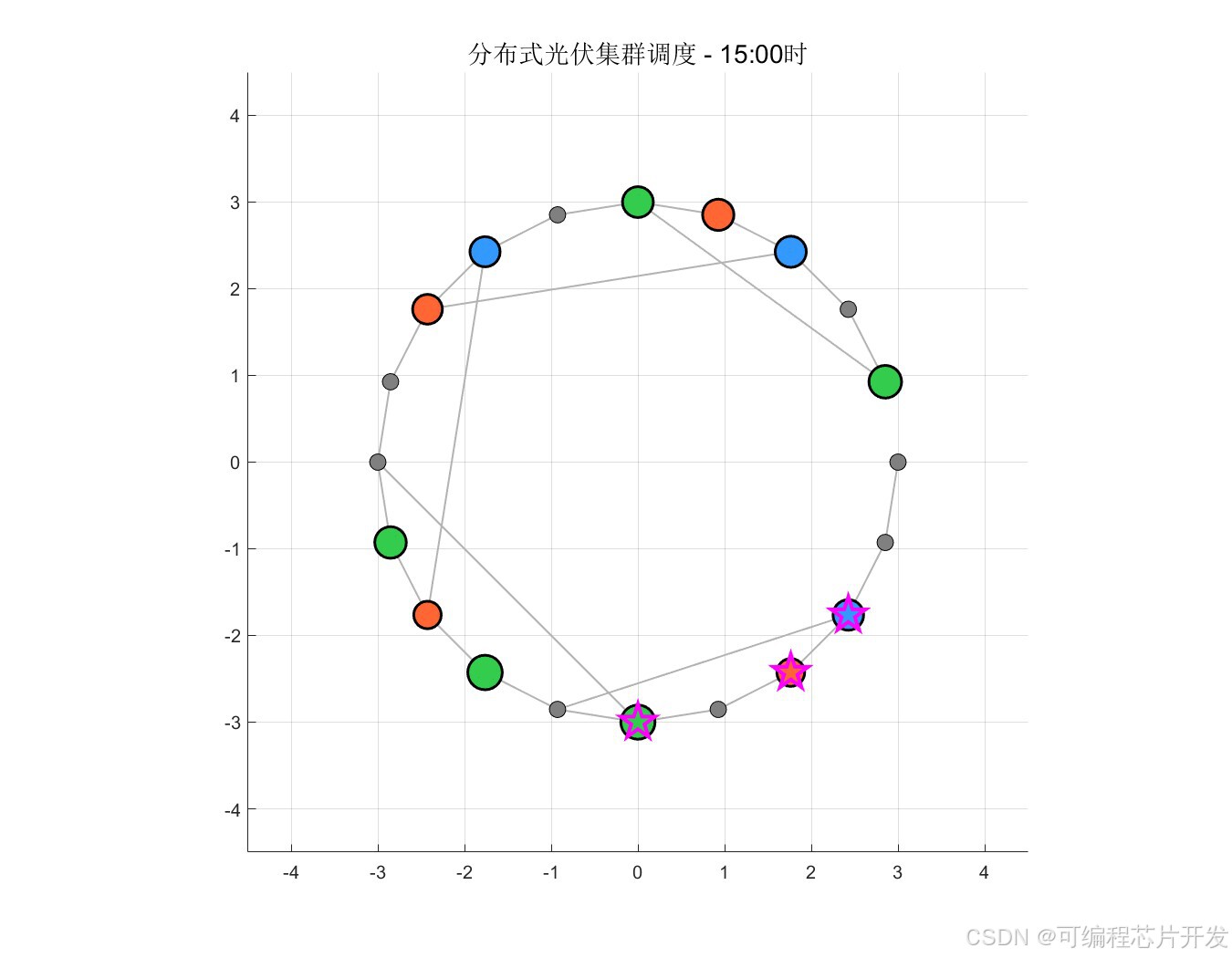
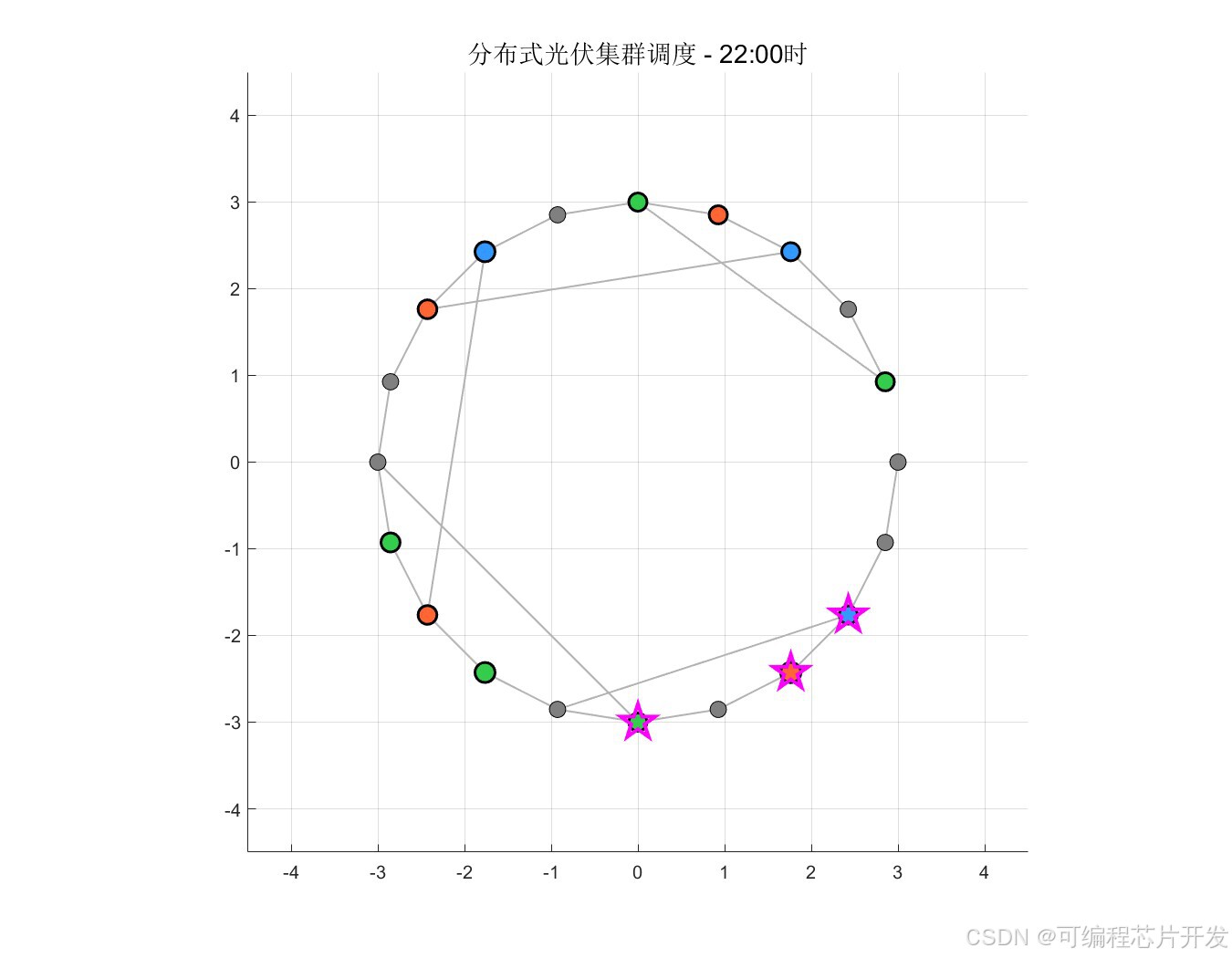
📊2.系统仿真结果
✅3.核心程序或模型
版本:Matlab2024b
%参数设置
% 配电网参数
N_nodes = 20; % 配电网节点数
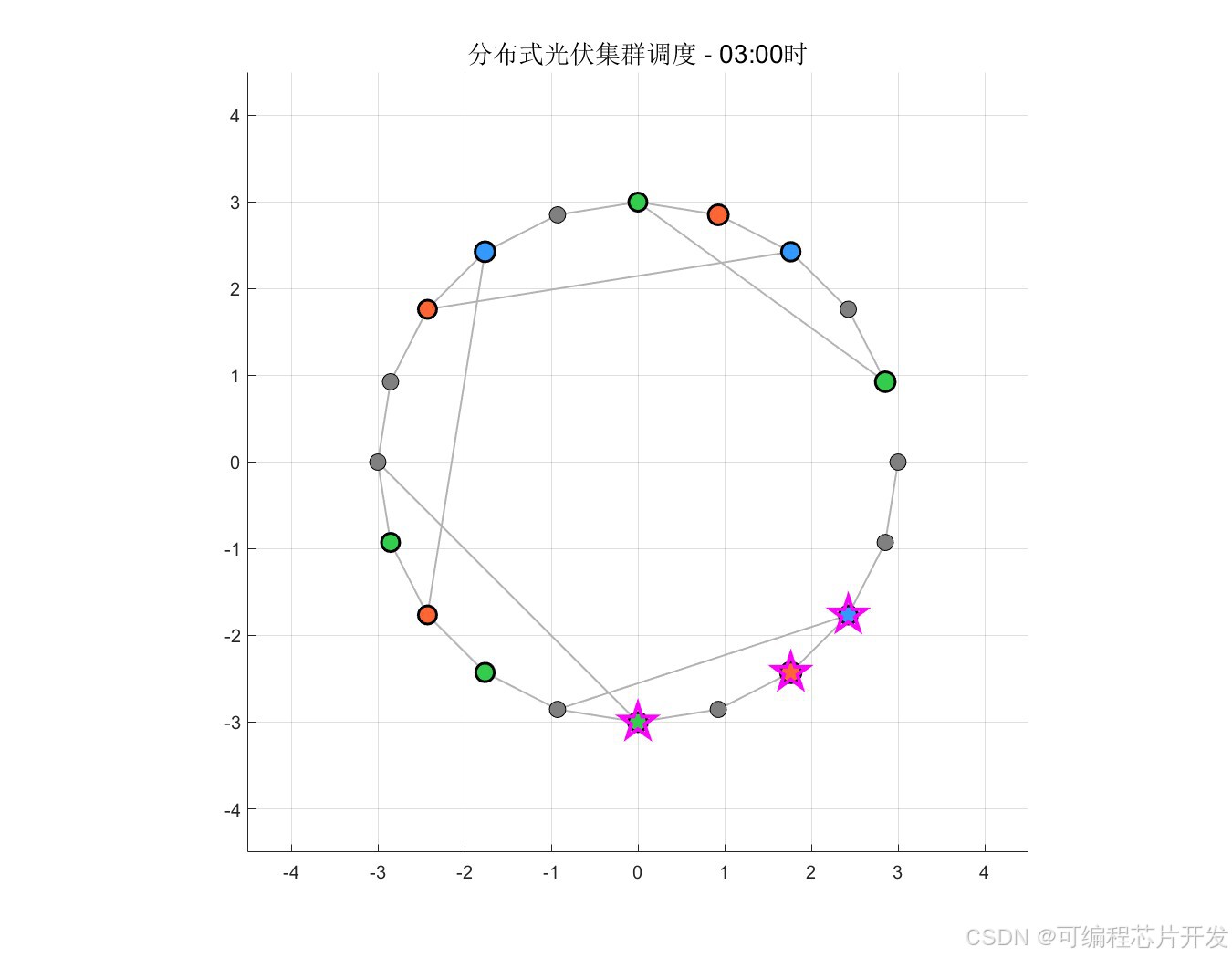
N_pv = 12; % 光伏接入节点数
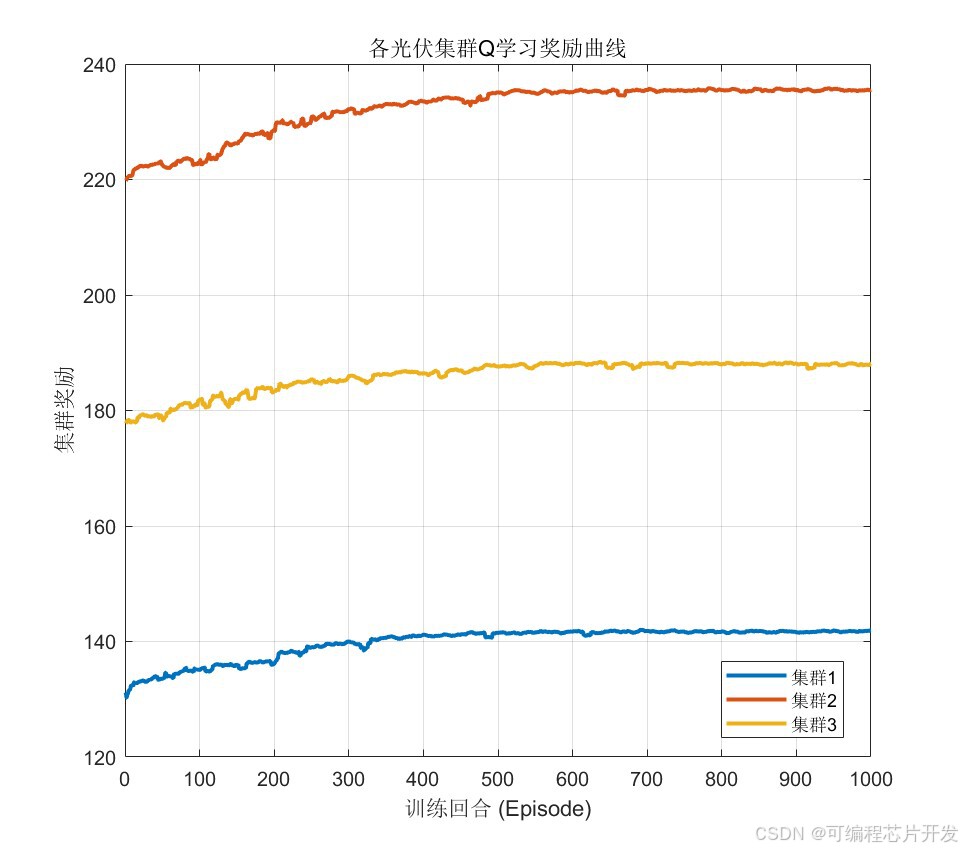
N_clusters = 3; % 集群数量
T = 24; % 调度周期(小时)
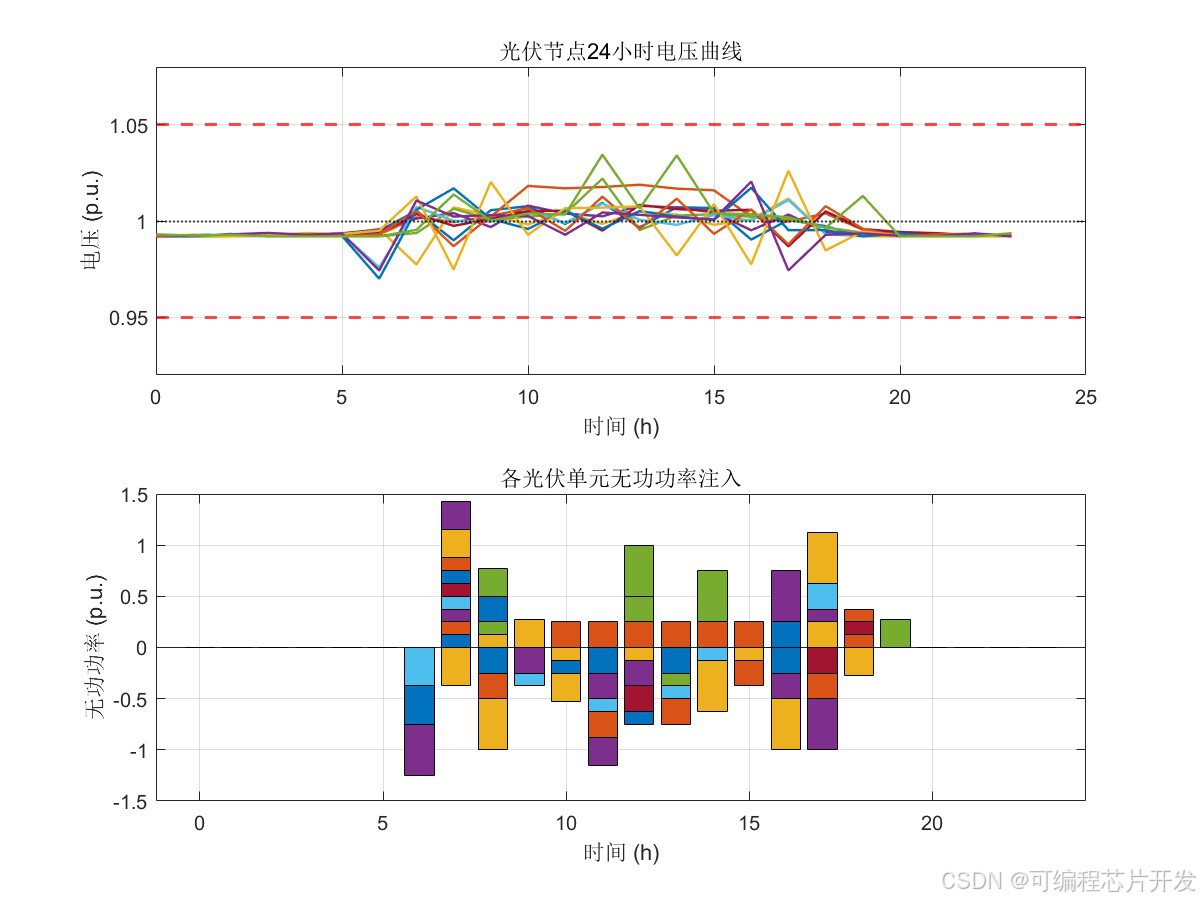
V_ref = 1.0; % 参考电压(标幺值)
V_min = 0.95; % 电压下限
V_max = 1.05; % 电压上限
% Q学习参数
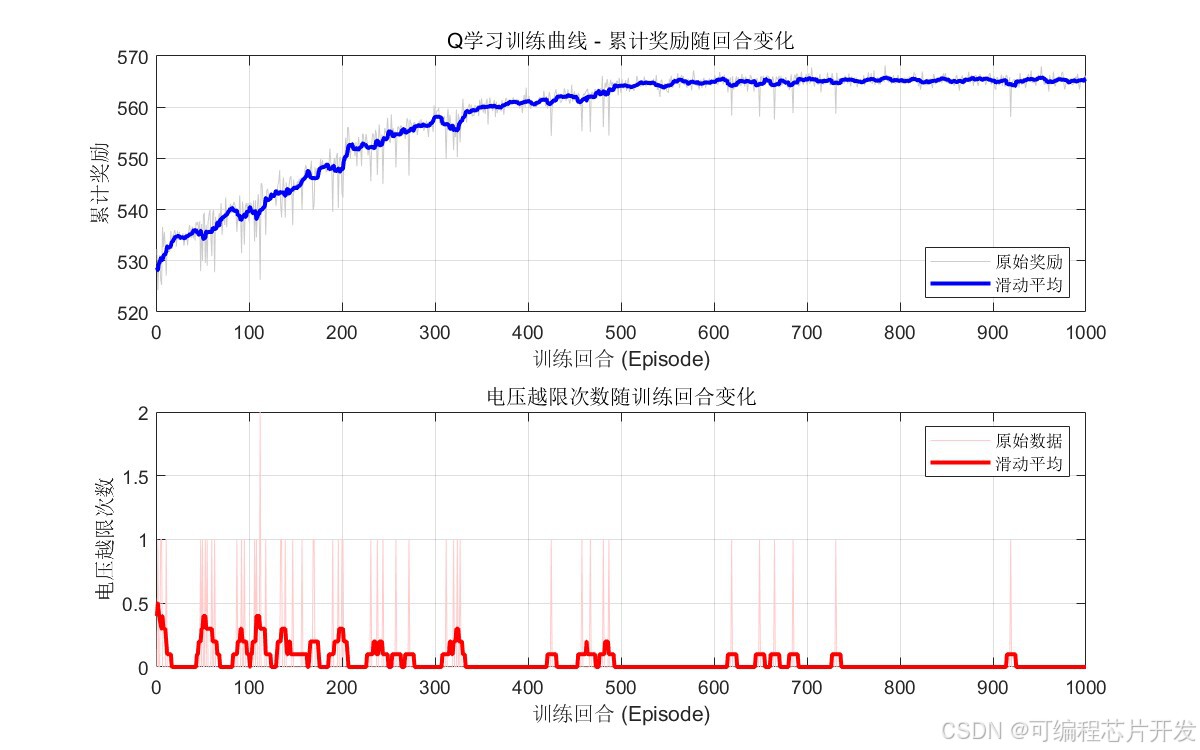
N_episodes = 1000; % 训练回合数
N_states_v = 10; % 电压偏差离散状态数
N_states_p = 5; % 功率裕度离散状态数
N_states = N_states_v * N_states_p;
N_actions = 9; % 无功调节动作数
alpha_q = 0.1; % 学习率
gamma_q = 0.95; % 折扣因子
epsilon_init = 0.9; % 初始探索率
epsilon_min = 0.05; % 最小探索率
epsilon_decay = 0.995; % 探索率衰减
% PCA参数
c_gain = 2.0; % 耦合增益
mu_blend = 0.6; % Q学习与PCA融合系数
🚀4.系统原理简介
4.1 上层模型------集群间功率分配
上层优化目标为最小化全网电压偏差与网络损耗:

其中Vref为参考电压,Plosst为t时刻的网络有功损耗,ω1和ω2为权重系数。
约束条件包括功率平衡约束和电压安全约束:

4.2 下层模型------集群内功率分配
下层目标为最小化集群内各光伏单元的调节成本:

其中Ck为第k个光伏单元的调节成本系数,ΔPk和ΔQk为功率调节量。
采用逃生优化算法(Escape Optimization Algorithm) 对双层模型进行迭代求解,其位置更新公式为:

其中r1,r2为随机系数,β为衰减因子,该算法通过模拟逃生行为增强全局搜索能力。
4.3 Q学习与PCA协同控制
在集群内控制层,将每个光伏逆变器建模为智能体,采用Q学习实现自适应决策。状态空间定义为当前节点电压偏差和功率裕度的离散化组合:

动作空间为无功功率调节档位:

奖励函数综合考虑电压改善效果与调节代价:

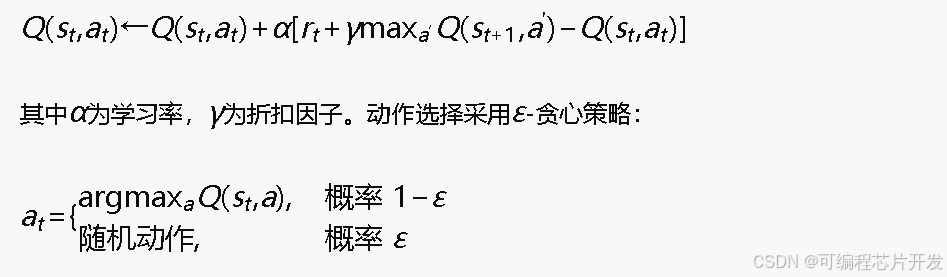
Q值更新遵循经典Bellman方程:
4.4 牵制一致性算法(PCA)
PCA通过仅对少数关键节点(牵制节点)施加控制信号,驱动整个集群达到一致状态。集群内第i个智能体的控制协议为:

4.5 Q学习与PCA的融合机制
Q学习输出的最优动作ai∗作为PCA的参考信号输入,PCA负责协调邻居间的动作一致性,最终融合输出为:

其中μ为融合系数,该机制既保证了个体决策的智能性,又维护了集群整体的协调性。系统收敛条件为所有智能体状态误差小于阈值:

💢5.完整工程文件
v v
关注后,GZH回复关键词:a43