目录
1.摘要
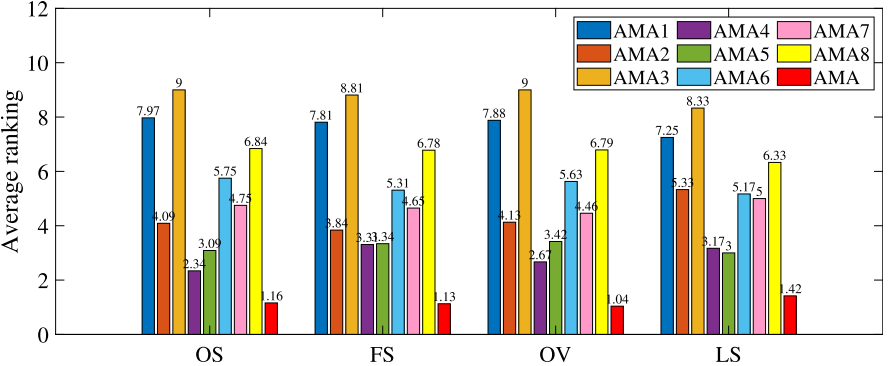
针对复杂作战约束下的多无人机协同任务分配问题,本文构建了综合优化总航程、最大完成时间与效费比混合变量模型,并提出一种自适应模因算法(AMA)。AMA算法融合约束感知初始化,采用双空间反馈驱动自适应局部搜索策略提升寻优精度。大规模测试表明,AMA较主流方法使平均相对百分比偏差显著降低65%--92%,验证了其在复杂约束条件下的优异求解效能与鲁棒性。
2.问题表述
基于无动态事件且飞行高度解耦,本文针对异构无人机集合与目标集合:
V = { V 1 , ... , V K U } , T = { T 1 , ... , T K t a r } \mathcal{V}=\{V_1,\ldots,V_{K_{\mathrm{U}}}\},\quad\mathcal{T}=\{T_1,\ldots,T_{K_{\mathrm{tar}}}\} V={V1,...,VKU},T={T1,...,TKtar}
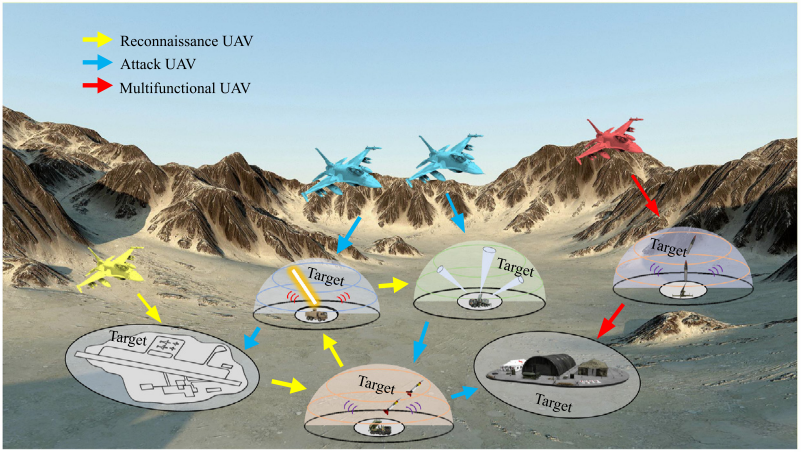
MCTA-PSDCM问题在多重作战约束下,联合决策侦察与打击任务的分配、执行时序及资源消耗方案。
作战系统包含侦察、打击与多功能三类无人机,具备侦察与打击能力的无人机集合分别定义为:
V O = { V 1 , ... , V K r e c } ∪ { V K r e c + K a t t + 1 , ... , V K r e c + K a t t + K m u l } V_O = \{V_1, \dots, V_{K_{\mathrm{rec}}}\} \cup \{V_{K_{\mathrm{rec}}+K_{\mathrm{att}}+1}, \dots, V_{K_{\mathrm{rec}}+K_{\mathrm{att}}+K_{\mathrm{mul}}}\} VO={V1,...,VKrec}∪{VKrec+Katt+1,...,VKrec+Katt+Kmul}
V A = { V K r e c + 1 , ... , V K r e c + K a t t + K m u l } V_A = \{V_{K_{\mathrm{rec}}+1}, \dots, V_{K_{\mathrm{rec}}+K_{\mathrm{att}}+K_{\mathrm{mul}}}\} VA={VKrec+1,...,VKrec+Katt+Kmul}
无人机能力及状态由以下属性向量表征:
⟨ G i , V i v a l , V i d i s , V i m i s , V i r e s , V i t i m , P i , m A , Ξ i ⟩ \langle G_i, V_i^{\mathrm{val}}, V_i^{\mathrm{dis}}, V_i^{\mathrm{mis}}, V_i^{\mathrm{res}}, V_i^{\mathrm{tim}}, P_{i,m}^A, \Xi_i \rangle ⟨Gi,Vival,Vidis,Vimis,Vires,Vitim,Pi,mA,Ξi⟩
K t a r K_{\mathrm{tar}} Ktar 个目标均需依次执行侦察( C C C)与打击( A A A)任务,总任务数为:
K t a s = 2 K t a r K_{\mathrm{tas}} = 2 K_{\mathrm{tar}} Ktas=2Ktar
目标及对应任务的时空与资源约束由以下属性向量联合描述:
⟨ T m l o c , T m v a l , T m D , t m , j S , t m , j E , R j min ⟩ \langle T_m^{\mathrm{loc}}, T_m^{\mathrm{val}}, T_m^D, t_{m,j}^S, t_{m,j}^E, R_j^{\min} \rangle ⟨Tmloc,Tmval,TmD,tm,jS,tm,jE,Rjmin⟩
联合优化总航程 F 1 F_{1} F1、最大完成时间 F 2 F_2 F2与效费比 F 3 F_3 F3(预期损失与毁伤收益之比),综合加权目标函数定义:
min F = λ 1 F 1 + λ 2 F 2 + λ 3 F 3 \min F=\lambda_1F_1+\lambda_2F_2+\lambda_3F_3 minF=λ1F1+λ2F2+λ3F3
3.AMA算法
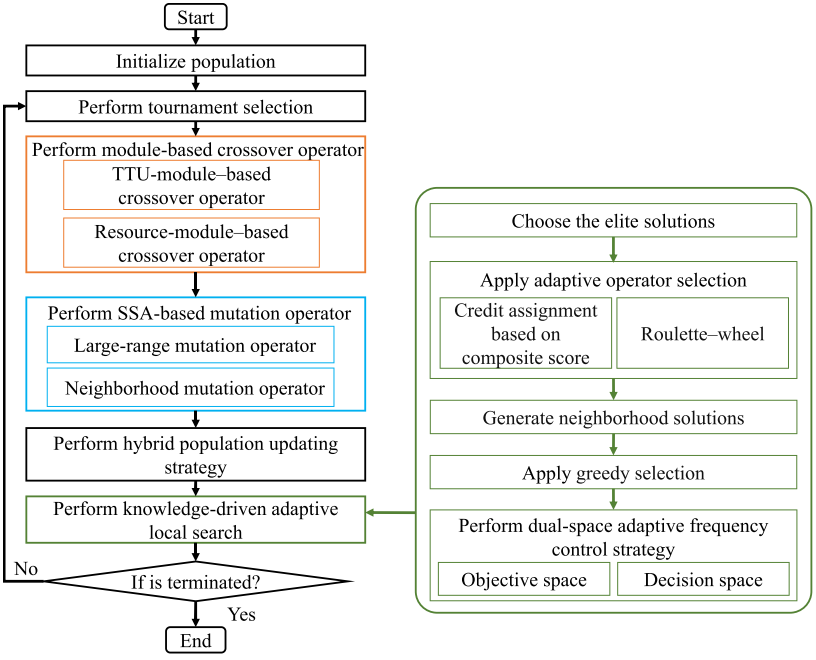
AMA通过混合编码与约束感知策略初始化种群,在迭代演化中,全局搜索阶段依次执行锦标赛选择算子更新,局部开发阶段则基于自适应算子选择机制动态调用知识驱动算子深度优化精英个体。
基于目标捆绑的混合变量编码策略

针对传统编码无法表征时序与资源消耗的局限,本文设计了一种融合目标索引、任务类型、无人机编号及资源消耗四层混合变量染色体结构。染色体依自左向右的时序排列,通过目标捆绑确保先侦后打约束以消除死锁,并引入零资源占位基因以统一编码长度。
种群初始化
在初始化阶段,算法循环遍历各基因位随机选择目标与未完成任务,根据能力匹配规则关联可用无人机,并在最后一层赋予随机资源消耗值。当某任务的累计分配资源达到阈值时即视为完成,且同目标后续任务的编码须满足时序约束。
问题特定全局搜索
选择阶段采用锦标赛选择,交叉阶段提出模块化交叉算子:TTU模块交叉 随机划分目标集,交叉重组前三层(目标-任务-无人机)结构以优化航迹;资源模块交叉置换资源层以调整效费比,并通过容量补充机制对低于最低需求的任务进行可行性修复。
变异阶段大范围突变 针对侦察或打击基因实施跨列段段互换或整基因捆绑置换,增强全局探索;邻域突变对相同资源类型的基因构建邻域序列并随机替换,实现局部细化。
知识驱动自适应局部搜索
自适应局部搜索框架引入无状态自适应算子选择机制(AOS),基于复合评分指标累积算子信用分 η u , v \eta_{u,v} ηu,v,通过下式更新算子权重并进行轮盘赌选择:
ω u , v + 1 = ω u , v ⋅ ( 1 − χ ) + χ ⋅ η u , v φ u , v \omega_{u,v+1} = \omega_{u,v} \cdot (1 - \chi) + \chi \cdot \frac{\eta_{u,v}}{\varphi_{u,v}} ωu,v+1=ωu,v⋅(1−χ)+χ⋅φu,vηu,v
设计双空间自适应频率控制策略,计算精英群体均值适应度差值 Δ F \Delta F ΔF 与决策空间质心密度差值 Δ Q \Delta Q ΔQ,依据其正负组合反馈动态调节局部搜索触发周期 q q q:
q = { θ , Δ F > 0 ∧ Δ Q < 0 2 θ , Δ F > 0 ∧ Δ Q > 0 3 θ , Δ F < 0 q = \begin{cases} \theta, & \Delta F > 0 \land \Delta Q < 0 \\ 2\theta, & \Delta F > 0 \land \Delta Q > 0 \\ 3\theta, & \Delta F < 0 \end{cases} q=⎩ ⎨ ⎧θ,2θ,3θ,ΔF>0∧ΔQ<0ΔF>0∧ΔQ>0ΔF<0
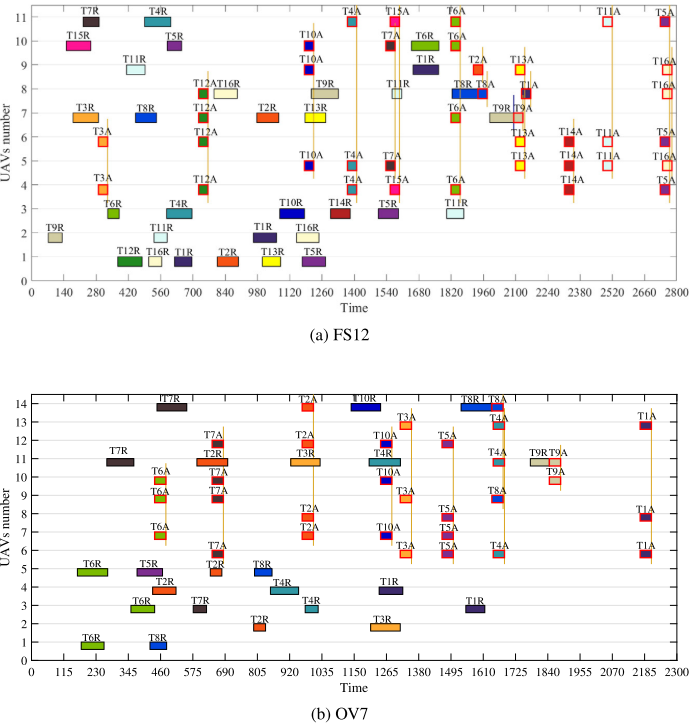
4.结果展示
5.参考文献
Teng F, Naouri A, Nouri N A, et al. Adaptive swarm intelligence optimization for Unmanned Aerial Vehicle-assisted edge computingJ. Swarm and Evolutionary Computation, 2026, 105: 102355.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx