主题10:实时性------硬实时与软实时
- 核心问题:哪些任务必须按时完成?
- 串联领域:CAN(硬实时,用于汽车控制)→ FMCW雷达(硬实时信号处理)→ 蓝牙音频(软实时)→ USB(等时传输)→ 操作系统(RTOS vs GPOS)→ 视觉SLAM(关键帧处理延迟)
实时性的精髓:应对不确定性
一个核心命题
为什么汽车里的刹车信号必须在几毫秒内送达,而手机上的应用偶尔卡顿一下却无伤大雅?
答案就在于两个字:承诺。
实时性,就是在不确定的世界里,做出确定的时间承诺。
硬实时与软实时的区别,不在于"快慢",而在于承诺的刚性:
- 硬实时:承诺"绝对兑现",否则系统失效。刹车信号迟到,车就停不下来。
- 软实时:承诺"大概率兑现",偶尔失约只是体验降级。视频卡顿一下,你顶多皱皱眉。
两个根本问题
任何实时系统都必须回答两个问题:
- 最坏情况是什么?------ 我能保证的最长延迟是多少?
- 最坏情况会持续多久?------ 我如何确保延迟不突破这个界限?
硬实时系统必须有可证明的、严格的上界;软实时系统只需要统计意义上的上界。前者像合同上的"不可抗力"条款,后者像天气预报里的"降水概率"。
三种手段
所有保障实时性的技术,归根结底是三种手段的组合:
| 手段 | 本质 | 代价 | 典型技术 |
|---|---|---|---|
| 隔离 | 消除干扰源 | 资源闲置 | 专用硬件、独立核心、预留时隙 |
| 调度 | 管理竞争顺序 | 复杂分析 | 优先级仲裁、响应时间分析 |
| 补偿 | 吸收波动 | 延迟增加 | 缓冲、预测、重传 |
- CAN总线:用优先级仲裁(调度)保证高优先级报文不受干扰。
- RTOS:用固定优先级抢占(调度)+ 优先级继承(隔离)保证任务响应。
- USB同步传输:用带宽预留(隔离)+ 无重传(放弃补偿)换取低延迟。
- 视觉SLAM关键帧:用前端/后端分离(隔离)+ 缓冲(补偿)保证跟踪实时。
- FMCW雷达:用专用硬件(隔离)保证FFT在下一个Chirp前完成。
一个思维模型
当你面对任何实时性问题时,只需问自己三层:
- 物理层:物理世界给我多长的时间窗口?(Chirp周期?帧间隔?控制周期?)
- 架构层:我用隔离、调度还是补偿来处理不确定性?
- 验证层:我如何证明最坏情况下的延迟是有界的?
实时性的通用视角
当你后续回顾其他主题(通信、计算、控制)时,请始终带着这个视角:
这个技术/系统,是如何处理"不确定性"的?它用了隔离、调度还是补偿?它承诺的确定性有多"硬"?
CAN的仲裁、USB的微帧、蓝牙的同步通道、RTOS的优先级、SLAM的关键帧------它们都是在用自己的方式回答同一个问题:
如何在不可预测的物理世界中,做出可预测的时间承诺?
这就是实时性的精髓。

硬实时与软实时
时间,被遗忘的维度
在数字系统的设计中,我们常常痴迷于算力、带宽、功耗和成本,却容易遗忘一个更为本质的维度------时间。
当你在智能手机上滑动屏幕时,系统必须在几十毫秒内响应,否则你会觉得"卡顿";当汽车在高速公路上行驶时,刹车信号必须在几毫秒内送达,否则可能酿成惨剧;当毫米波雷达探测前方障碍物时,信号处理必须在下一个Chirp到来前完成,否则目标就会"消失"。
"实时性"并非简单地指"速度快",而是指系统在规定的时间窗口内完成规定任务的能力。这是数字系统对物理世界的时间承诺。
这篇文章将从四个角度系统梳理实时性的核心问题:哪些任务必须按时完成? 我们会串联起CAN总线、FMCW雷达、蓝牙音频、USB、操作系统和视觉SLAM等多个技术领域,构建一个从物理层到应用层的实时性认知框架。
这个主题里的几篇文章其实都在反复说着同一个主题,你可能会觉得似乎在反复论证同一个论点,稍显重复。但权衡很久我还是想保留这几篇文章,我还是希望可以多几个角度去看待实时性的问题。
一、实时性的本质是什么?
1.1 实时的定义:快 (\neq) 准时
"实时"不是"高性能"的同义词。一个每秒处理十亿次浮点运算的超级计算机,如果无法保证任务在规定的截止时间前完成,它仍然是"非实时"的。相反,一个只有8位微控制器的简单系统,只要能可预测地在1毫秒内响应刹车信号,它就是"硬实时"的。
实时的核心是确定性。系统必须能够在最坏情况下(而不是平均情况下)保证任务的完成时间。
1.2 实时性的层次:硬实时、固实时、软实时
根据错过截止时间的后果严重程度,实时性可分为三个层次:
-
硬实时(Hard Real-Time) :错过截止时间 = 系统失效 = 灾难性后果。典型代表是CAN总线 ------汽车制动信号必须在规定时间内送达,否则刹车失效;FMCW雷达的信号处理必须在下一个Chirp周期前完成,否则目标丢失。这些系统对时间有"绝对契约",任何违约都不可接受。
-
固实时(Firm Real-Time) :偶尔错过截止时间可以接受,但频繁错过会导致系统拒绝服务。典型代表是USB等时传输------音视频数据包如果偶尔丢失,只是画面短暂噪点或音频轻微爆音,但如果连续丢失,流媒体就会中断。
-
软实时(Soft Real-Time) :错过截止时间只意味着服务质量下降,系统仍可运行。典型代表是蓝牙音频 ------偶尔的卡顿可以容忍;视觉SLAM的后端优化------闭环检测延迟几秒钟,并不影响前端的持续跟踪。
1.3 三种类型的对比
| 类型 | 错过后果 | 典型技术 | 时间尺度 |
|---|---|---|---|
| 硬实时 | 灾难 | CAN、FMCW雷达、NFC | 纳秒~毫秒级 |
| 固实时 | 质量下降 | USB等时传输、LE Audio | 微秒~毫秒级 |
| 软实时 | 可容忍 | 蓝牙经典、视觉SLAM后端 | 毫秒~秒级 |
二、如何衡量"准时"?
如果说实时性是对时间的承诺,那么度量就是检验承诺是否兑现的标尺。不同技术领域有着截然不同的度量方式,但都指向同一个问题:"准时"到底意味着多少时间?
2.1 微观尺度:物理层的纳秒与微秒
在物理层,实时性由电路和电磁波的速度决定。
FMCW毫米波雷达 的时间尺度以纳秒计。其Chirp信号的频率变化、ADC采样时刻、FFT计算窗口,都必须精确到纳秒级。距离分辨率公式 (\Delta R = c/(2B)) 告诉我们,要分辨3.75厘米的目标,就需要4GHz带宽------这意味着ADC必须以极高的速率采样,任何微秒级的延迟都会导致测距失败。
MIPI D-PHY的高速模式中,单位间隔(UI)仅约0.67纳秒(1.5Gbps速率),数据与时钟之间的偏移必须控制在±0.1 UI以内。这是物理层的"硬实时"------信号完整性要求如此,没有妥协空间。
USB 2.0 的微帧间隔为125微秒,CAN总线的位时间约为8~20微秒(500kbps速率)。这些是协议层的时间基准,决定了上层通信的实时性上限。
2.2 中观尺度:协议层的毫秒
在协议层,实时性体现为超时、轮询周期和端到端延迟。
NFC通过FWT(帧等待时间)定义了卡片响应的时间窗口------通常为4.8毫秒,通过WTX(等待时间扩展)可以延长到约77毫秒。如果卡片在这个窗口内没有响应,读卡器就会认为通信失败。
蓝牙LE Audio的同步通道定义了ISO间隔和子事件,最小间隔可短至400微秒。T_IFS(帧间间隔)在蓝牙6.0中可缩短到10微秒,大幅降低传输延迟。
CAN总线的最坏情况响应时间分析(RTA)通过迭代计算高优先级报文对低优先级报文的干扰,确保每条报文都能在截止时间前送达。工程上通常要求总线负载不超过50%,以保证确定性。
2.3 宏观尺度:应用层的秒
在应用层,实时性以用户感知为基准。
视觉SLAM的前端(视觉里程计)必须在相机帧间隔内完成处理------30fps对应33毫秒,60fps对应16.7毫秒。而后端优化和闭环检测可以容忍数百毫秒甚至数秒的延迟。
操作系统的调度延迟和中断延迟决定了任务的响应速度。RTOS可将中断延迟控制在微秒级,而标准Linux可能达到数十微秒甚至毫秒级。
三、如何确保"准时"?
实时性不是凭空实现的,它依赖于从物理层到应用层的层层保障。每一层都有其独特的设计哲学,共同构建起时间的"防护堤坝"。
3.1 物理层:硬件的确定性
物理层是实时性的基础。在这里,时间由电路、电磁波和晶体振荡器定义。
CAN总线的CSMA/CR(载波监听多路访问/冲突解决)机制是硬件级实时性的典范。当多个节点同时发送时,通过"线与"逻辑进行逐位仲裁,优先级高的报文自动胜出,无需冲突后重传。这种机制确保了最坏情况下的延迟是确定的、可计算的。
FMCW雷达的信号处理链------从Chirp生成、ADC采样到FFT计算------由专用硬件(DSP、FPGA、硬件加速器)完成。这些硬件的执行时间是确定的,因为不存在操作系统的调度开销或中断干扰。
USB 3.0的物理层采用全双工通道,发送和接收可以同时进行,消除了半双工总线中方向切换带来的等待延迟。它采用8b/10b编码和包路由技术,确保数据能精确地送达目标设备。
3.2 协议层:有界延迟的保障
协议层通过带宽预留、优先级调度和超时机制,为实时数据提供有界延迟的通道。
USB 2.0的同步传输专为音视频设计,主机为同步端点预留固定带宽,数据包不进行握手重传。这意味着传输延迟是确定的,但可能牺牲数据完整性------偶尔的误码直接丢弃,不会为了重传而打断后续数据流。
蓝牙LE Audio的同步通道是类似的机制。通过CIG(连接等时组)和CIS(连接等时流)的精细调度,多个音频流(如TWS耳机的左右声道)可以实现微秒级的同步。
ZigBee的信标使能模式通过GTS(保证时隙)机制,为特定设备预留无竞争的传输窗口。这使其在工业控制等需要确定延迟的场景中具有优势。
3.3 操作系统:实时调度与通用调度
操作系统是实时系统的"中枢神经",负责调度任务、管理中断、同步资源。
**RTOS(实时操作系统)**采用固定优先级抢占式调度。最高优先级的就绪任务总能立即获得CPU,调度延迟极短(微秒级)。它通过优先级继承协议防止优先级反转,通过将关键操作移出中断服务例程来减少关中断时间。典型如FreeRTOS、VxWorks、QNX,广泛用于汽车、工业控制、航空航天等硬实时领域。
**GPOS(通用操作系统)**如Linux,追求平均吞吐量和公平性。标准Linux内核只有有限的可抢占性,调度延迟受系统负载影响较大。通过PREEMPT_RT实时补丁,可以将自旋锁转换为可抢占的互斥锁,减少不可抢占区域,使Linux接近实时内核的行为。但即便如此,由于内核复杂度高,绝对确定性仍难以保证。
混合架构是复杂系统的常见选择。一个核心运行RTOS处理硬实时任务(如电机控制),另一个核心运行Linux处理非实时任务(如网络协议栈、用户界面)。这种"AMP"架构兼顾了实时性和功能丰富性。
3.4 算法与架构:软实时设计
在软实时系统中,算法和架构设计扮演着关键角色------它们通过"聪明"的方式,在精度与速度之间取得平衡。
视觉SLAM的关键帧机制是最佳范例。前端(视觉里程计)以硬实时节奏处理每一帧图像,提取特征、估计位姿。但只有被选为"关键帧"的图像才会触发后端优化------这相当于一个"减速带",将前端积累的信息以可控的频率传递给后端,避免后端计算风暴阻塞前端。
FMCW雷达的稀疏分离方法 通过算法优化,将信号分离计算耗时缩短至1.51毫秒,仅为主流方法的37.8%。轻量级神经网络(如MobileNetV2)在边缘设备上的推理时间可低至2.57毫秒,满足软实时交互需求。
**USB 3.0的批量流(Streams)**允许一个端点拥有多个数据流缓冲区,主机和设备可以乱序、并发地处理多个指令,极大地降低了I/O等待延迟。这是协议层的"并行化"智慧。
四、时间尺度与应用场景:从纳秒到秒
把这些技术放在一起看,实时性的范围从物理层的纳秒级信号一直延伸到应用层的秒级响应,每个层次的时间要求和保障手段都不同。
| 技术领域 | 核心实时性类型 | 时间尺度 | 核心保障机制 | 核心应用 |
|---|---|---|---|---|
| FMCW雷达 | 硬实时 | 纳秒~毫秒 | 物理层Chirp、FFT硬件加速 | 自动驾驶、生命体征监测 |
| MIPI D-PHY | 准硬实时 | 纳秒~毫秒 | 双模操作、源同步时钟 | 手机摄像头、平板显示屏 |
| CAN总线 | 硬实时 | 微秒~毫秒 | 基于优先级的CSMA/CR仲裁 | 汽车控制、工业现场 |
| USB 3.0(同步) | 硬实时 | 微秒~毫秒 | ITP时间同步、反馈端点 | 专业音视频、高速数据采集 |
| 蓝牙LE Audio | 准硬实时 | 微秒~毫秒 | 同步通道、T_IFS | TWS耳机、空间音频 |
| NFC | 硬实时 | 毫秒级 | FWT超时、WTX扩展 | 支付、门禁 |
| 视觉SLAM(前端) | 硬/固实时 | 毫秒级 | 多线程架构、IMU融合 | 移动机器人、AR/VR |
| RTOS | 硬/固实时 | 微秒~毫秒 | 固定优先级抢占、优先级继承 | 各类实时系统的基础 |
| Wi-Fi 7 | 准硬实时 | 毫秒级 | TSN增强、多链路操作 | AR/VR、工业无线 |
| ZigBee | 软/固实时 | 毫秒~秒 | GTS时隙、信标使能模式 | 楼宇自控、工业传感器 |
| 视觉SLAM(后端) | 软实时 | 百毫秒~秒 | 关键帧机制、滑动窗口优化 | 全局地图优化、闭环检测 |
| GPOS | 软实时 | 毫秒~秒 | CFS调度、PREEMPT_RT补丁 | 复杂多任务处理、人机交互 |
从这张表中可以清晰地看到一条规律:越靠近物理层,实时性越"硬",时间尺度越短;越靠近应用层,实时性越"软",时间尺度越长。 这不是偶然,而是系统设计的必然------物理世界的信号以光速传播,必须在极短时间内响应;而人的感知和决策,则可以容忍更长的延迟。
五、实时系统的多层次协同
在真实系统中,不同实时性要求的技术并非孤立运行,而是紧密协同,共同构成一个完整的实时系统。
以自动驾驶为例,其时间谱系涵盖从纳秒到秒的多个层次:
- FMCW雷达以纳秒级精度发射Chirp信号,经DSP和硬件加速器处理,在毫秒级输出点云数据。
- MIPI CSI-2接口将相机图像以微秒级延迟传输到处理器,供视觉SLAM前端提取特征、估计位姿(毫秒级)。
- IMU通过SPI或I2C提供高频运动数据,与视觉帧硬件同步(微秒级)。
- CAN总线承载底层控制指令(如制动、转向),以毫秒级周期与执行器通信。
- RTOS或带有实时补丁的Linux负责调度所有任务,确保关键线程(如雷达信号处理、控制输出)优先执行。
- 非实时任务如高清地图下载、OTA升级等,运行在GPOS的普通线程中,不影响控制环路。
又如智能手机的"碰一碰"支付场景:
- NFC芯片在毫秒级FWT窗口内与读卡器完成交互(硬实时)。
- NCI驱动在操作系统层面管理超时(软实时),通过工作队列或高优先级线程处理协议栈。
- 安全元件进行加密运算可能需要数百毫秒,通过WTX机制向读卡器申请时间扩展。
- 用户界面在秒级内显示支付成功,用户可容忍这一延迟。
这些案例揭示了一个深刻道理:实时系统需要不同层次、不同领域的技术相互配合,而不是只靠某一种技术。 硬实时任务守护着物理安全的底线,软实时任务支撑着用户交互的体验,非实时任务则拓展着系统的功能边界。
写在最后:实时性的未来演进
技术演进的趋势
纵观我们所分析的技术领域,可以清晰地看到一条演进脉络:
从随机竞争到协调调度:早期的以太网(CSMA/CD)和传统Wi-Fi(DCF)依赖随机退避,延迟不可控。CAN通过非破坏性仲裁实现了确定性的优先级调度;Wi-Fi 7引入TSN增强和多AP协调;蓝牙LE Audio通过同步通道实现微秒级同步。实时性正在从"尽力而为"向"确定性保障"演进。
从独立到协同:传统系统各层"各扫门前雪",TCP对Wi-Fi物理层的变化"视而不见"。新一代方案通过跨层信息交互(如Cupid拥塞控制算法感知空口利用率),实现更精准的资源调度。硬件、协议、操作系统、算法正在更紧密地协同。
从专用到通用:硬实时曾是专用芯片和RTOS的领地。如今,通用处理器加上实时补丁(如PREEMPT_RT)、GPU加上轻量级神经网络、FPGA加上硬件加速器,正在将部分硬实时能力赋予通用平台。
实时性哲学的三层内涵
通过本文的梳理,我们可以提炼出实时性的三层哲学内涵:
第一层:时间即物理。在最底层,实时性由电磁波传播速度、晶体振荡器精度和电路开关时间定义。FMCW雷达的Chirp周期、MIPI的UI、CAN的位时间,都是物理定律在数字世界的投影。
第二层:时间即契约。在协议层,实时性体现为系统各组件之间的时间约定------何时发送、何时响应、何时超时。NFC的FWT、USB的微帧、蓝牙的连接间隔,都是这种契约的具象化。
第三层:时间即设计。在系统层,实时性体现为架构的智慧------如何将硬实时与软实时任务分离,如何在精度与速度之间权衡,如何用关键帧机制缓冲后端风暴。这是工程师对时间的"设计"。
在后续的主题中,当你遇到一个新的技术领域时,不妨问问自己这四个问题:
- 概念与分类:这项技术是硬实时、软实时还是固实时?它的"准时"由什么定义?
- 度量与评估:它用哪些指标衡量实时性?时间尺度是纳秒、微秒、毫秒还是秒?
- 实现与保障:它如何从物理层、协议层、操作系统层保障实时性?
- 时间尺度与应用:它的实时性如何影响上层应用?与其他技术如何协同?
这四个角度,就是理解任何实时系统的"四把钥匙"。
时间即设计:从源头构建实时系统
在系统设计领域,我们常常听到这样一句话:"先让功能跑通,再优化性能。"对于吞吐量、功耗、成本这些指标,迭代式优化确实很有效。但对于时间------尤其是实时系统中的时间------这种思路却可能致命。因为时间不是可以"优化"出来的属性,而是一种必须在设计之初就纳入考量的结构性约束。
"时间即设计"不是一句口号,而是一种设计哲学。它意味着:在写下第一行代码、选定第一颗芯片之前,你就必须深刻理解物理世界的时间常数,精确评估硬件的性能边界,并将时间作为第一优先级贯穿于整个系统架构。这篇文章将从几个关键维度展开,论证为什么时间必须在设计之初就被纳入核心,并借助我们之前深入分析的技术案例,展示这种设计哲学如何在实际系统中落地。
一、为什么时间不能靠事后优化?
1.1 时间与功能逻辑的耦合
时间不是可以随意剥离的"性能指标",它往往与系统的功能逻辑深度耦合。以CAN总线为例,其报文ID同时承担了优先级和标识符的双重角色。如果在设计之初没有正确分配ID的优先级,导致高实时性报文被低优先级报文阻塞,那么事后修改ID就意味着整个网络通信矩阵的重构------成本极高,甚至不可行。
再看FMCW雷达。它的Chirp周期由距离和速度分辨率决定,这个参数一旦确定,ADC采样率、FFT窗口、信号处理流水线都必须与之匹配。如果在流片之后才发现处理速度跟不上,那几乎不可能通过软件优化来解决。硬件边界就是物理的墙,撞上去没有商量余地。
1.2 硬件性能的物理边界
硬件一旦选定,它的性能边界就固定了。CPU的中断延迟、总线的位定时、存储器的访问时间------这些都不是软件可以突破的。如果你选择了一款中断延迟最大为10微秒的MCU,却要保证5微秒的中断响应,那么任何软件优化都无济于事。
- RTOS的调度延迟受硬件计时器精度和中断响应时间的限制。
- USB的微帧周期由主机控制器硬件决定,软件改不了。
- MIPI的UI(单位间隔)由物理层电路的速度决定,设计时就定了。
这些边界必须在设计之初就被清晰地识别和量化。不要指望后期优化能突破物理极限。
1.3 实时性是一张多米诺骨牌
实时系统中,一个环节的延迟往往会引发连锁反应。
- 视觉SLAM中,前端跟踪若超时,会导致丢帧,进而使IMU预测累积误差,最终造成定位漂移。
- 蓝牙音频中,如果一个同步包未能及时送达,播放缓冲区可能下溢,产生"咔嗒"声。
- 汽车控制中,CAN报文延迟可能导致发动机控制环路失稳。
这些连锁反应说明:时间不是一个可以后期"调优"的孤立指标,而是需要从顶层逐层分解、逐层保证的结构性设计。它像多米诺骨牌的第一张------推倒它,后面的都会倒下。
二、设计之初:从物理世界的时间常数出发
2.1 物理世界定义时间窗口
物理世界的时间常数是所有实时系统的起点。这些限制是刚性的,不是你可以讨价还价的。
- 汽车制动:车辆以100km/h行驶时,制动系统响应延迟10ms,制动距离就会增加约28cm。这个数字来自 (s = v \cdot t),是物理定律。因此,制动信号的端到端延迟必须被控制在毫秒级,并且必须被严格证明。
- AR/VR:人眼和前庭系统对"运动到光子"延迟的容忍上限约为20ms。超过这个阈值,用户就会产生眩晕。这个时间窗口决定了从传感器采样、图像渲染到显示刷新的整个链路都必须被精确设计。
- FMCW雷达:Chirp周期 (T) 由最大探测距离 (R_{\text{max}} = (c \cdot T)/2) 决定。要提高探测距离,必须增加 (T),但这会降低速度分辨率和数据更新率。雷达工程师必须在设计之初就明确探测需求,选择恰当的Chirp参数。
- 人机交互:人对触觉、听觉、视觉的延迟感知阈值各不相同。按键响应超过50ms会觉得"迟钝",音频断流超过10ms可能被察觉,画面撕裂超过16ms就会影响沉浸感。
时间即设计的第一步,就是识别这些物理世界的时间常数,并将其转化为系统的顶层时间需求。
2.2 从顶层需求分解出子系统时间预算
有了顶层时间窗口,接下来要做的,是把它逐层分解到子系统、模块甚至硬件单元。例如,AR/VR的20ms端到端延迟可能被分解为:
- 传感器曝光与传输:3ms
- 视觉SLAM前端:5ms
- 渲染引擎:8ms
- 显示传输与刷新:4ms
每一层都必须有自己的时间预算,并且必须留有余量来应对最坏情况。USB同步传输 的微帧125微秒,就是主机控制器为等时数据预留的确定性时隙;ZigBee信标模式中的GTS时隙,则是为特定设备预留的无竞争窗口。这些机制都是"设计之初就把时间预算分配好"的体现。
三、硬件选型:时间作为第一优先级
3.1 性能指标必须与时间需求匹配
硬件选型时,不能只看算力、带宽这些平均指标,必须关注与时间相关的最坏情况指标:
- CPU的中断延迟:包括硬件响应时间和软件保存上下文的时间。对于需要微秒级响应的硬实时任务,必须选择中断延迟有明确上界且足够小的CPU。
- 总线的仲裁机制:CAN总线通过优先级仲裁确保高优先级报文延迟有界;而以太网的CSMA/CD存在随机退避,不适合硬实时。设计之初就要根据实时性需求选择合适的总线。
- 存储器的访问时间:对实时任务而言,缓存命中率、DRAM刷新周期、Flash等待状态都会影响执行时间的确定性。必须选用提供最坏情况访问时间数据的存储器。
案例 :FMCW雷达的硬件选型中,FFT加速器是核心。如果FFT引擎不能在Chirp周期内完成计算,再高的距离分辨率也是空谈。设计者必须确认硬件数据手册中的"最坏情况FFT时间"小于Chirp周期。
3.2 硬件冗余与时间余量
即使硬件满足了最坏情况指标,通常也需要额外的时间余量,以应对老化、温度变化、电压波动等因素。汽车电子行业常用的"降额设计"原则就是例子:CPU实际负载不超过最大处理能力的70%,总线负载不超过50%。这些冗余不仅是为了可靠性,更是为了保证在最严苛的条件下仍能满足时间承诺。
四、软件架构:将时间显式化
4.1 时间作为线程划分的依据
一个好的实时软件架构,会把不同时间需求的任务划分到不同的线程或核心,并用明确的机制管理它们之间的依赖。视觉SLAM的经典架构就是一个很好的例子:
- 跟踪线程(硬实时,高优先级)处理每一帧。
- 局部建图线程(软实时,中优先级)处理关键帧。
- 闭环检测线程(非实时,低优先级)处理全局优化。
这种划分正是基于时间需求:跟踪线程必须保证帧率,所以它不能被后两个线程阻塞。
4.2 显式的时间预算管理
在实时软件中,每个任务都应该有明确的时间预算。通过静态最坏情况执行时间(WCET)分析 或运行时监控 ,确保任务不超时。例如,在RTOS 中,可以为每个任务设置"执行时间预算",当任务超时时触发错误处理。汽车电子中,通过看门狗监控任务周期,一旦错过截止时间,系统进入安全状态。
4.3 优先级与调度策略的精确设计
RTOS 的固定优先级调度、CAN 的报文优先级、Linux的SCHED_FIFO------这些都是软件层面管理时间的工具。设计之初就需要为每个任务分配合理的优先级,并通过响应时间分析来验证可调度性。
优先级反转是一个常见的设计陷阱。你必须通过优先级继承或优先级天花板协议来防范它------这些机制必须在设计阶段就被纳入,而不是等系统出现异常之后再补救。
五、验证与测试:测量与验证时间要求
5.1 静态分析与形式化验证
对于硬实时系统,仅仅依靠测试是不够的,因为测试无法覆盖所有最坏情况。你必须使用响应时间分析(RTA) 、最坏情况执行时间(WCET)分析等静态方法,从数学上证明时间承诺的可满足性。
- CAN总线中,通过RTA可以计算每个报文的最坏情况响应时间。
- RTOS中,通过速率单调分析可以验证任务集的可调度性。
5.2 精确的时间测量
设计完成后,必须用逻辑分析仪、示波器、性能计数器等工具测量实际的时间行为,并与设计值比对。USB 2.0 的微帧抖动是否在允许范围内?MIPI D-PHY的数据-时钟偏移是否小于0.1 UI?这些物理层面的测量,是验证物理层设计正确性的唯一手段。
5.3 压力测试与边界测试
在最坏负载、最恶劣环境(高温、电磁干扰、电压波动)下测试系统,确保时间承诺在极端条件下依然成立。汽车电子 会进行"最坏工况"测试,例如在发动机舱高温环境下验证CAN通信的位定时稳定性。FMCW雷达会在有干扰源的情况下测试信号处理链的实时性。
六、时间即设计:一个完整的案例
让我们以自动驾驶域控制器为例,完整地展示"时间即设计"如何贯穿始终。
-
顶层时间需求:车辆以120km/h行驶,从感知到控制指令输出的端到端延迟必须小于100ms(由制动距离和安全冗余决定)。
-
分解时间预算:
- 传感器(相机、雷达、激光雷达)数据采集与传输:20ms
- 感知融合与目标跟踪:30ms
- 决策规划:30ms
- 控制指令生成与总线传输:20ms
-
硬件选型:
- 选择支持MIPI CSI-2的ISP,保证图像从传感器到内存的延迟小于5ms。
- 选择带有FFT硬件加速器的雷达芯片,保证点云生成在10ms内完成。
- 选择CAN FD控制器,支持更高的数据速率和优先级仲裁,确保控制指令在5ms内送达执行器。
- 选择多核SoC,将感知、决策、控制分配到不同核心,并采用AMP架构,将控制任务锁定在独立核心上,避免调度干扰。
-
软件架构:
- 感知线程(硬实时,高优先级)处理传感器数据,输出目标列表。
- 决策规划线程(软实时,中优先级)根据目标列表生成轨迹。
- 控制线程(硬实时,最高优先级)根据轨迹计算控制量,通过CAN发送。
- 使用RTOS 或Linux + PREEMPT_RT管理线程,并设置优先级继承防止反转。
-
验证:
- 使用WCET分析工具测量每个任务的最坏情况执行时间。
- 在HIL(硬件在环)测试台上注入最坏负载,测量端到端延迟。
- 用逻辑分析仪监控CAN总线,验证控制报文的响应时间。
通过这样的流程,时间从顶层需求被逐层分解、落实到硬件选型、体现在软件架构、最终被验证。这正是"时间即设计"的完整实践。
写在最后:时间是最稀缺的资源
在数字系统中,算力、带宽、功耗都可以通过规模或技术升级来缓解,唯独时间是不可再生、不可扩展的资源。一个系统可以容忍算力不足(只是慢一些),可以容忍带宽受限(只是数据传输时间长一些),但无法容忍时间承诺的失效------因为物理世界不会等待。
"时间即设计"的本质,就是将时间视为与功能、安全、成本同等重要的第一性约束。它要求我们:
- 在设计之初就深刻理解物理世界的时间常数。
- 将顶层时间需求精确分解到每个子系统和模块。
- 选择硬件时,以时间性能(最坏情况)为关键指标。
- 在软件架构中,将时间显式化,通过线程分离、优先级管理、时间预算来保障。
- 通过分析和测试,证明时间承诺的可兑现性。
当我们真正把时间纳入设计的核心,我们构建的将不只是功能正确的系统,更是可靠的、可预测的、与物理世界同步的系统。这才是实时系统设计的精髓,也是"时间即设计"这一理念的价值所在。
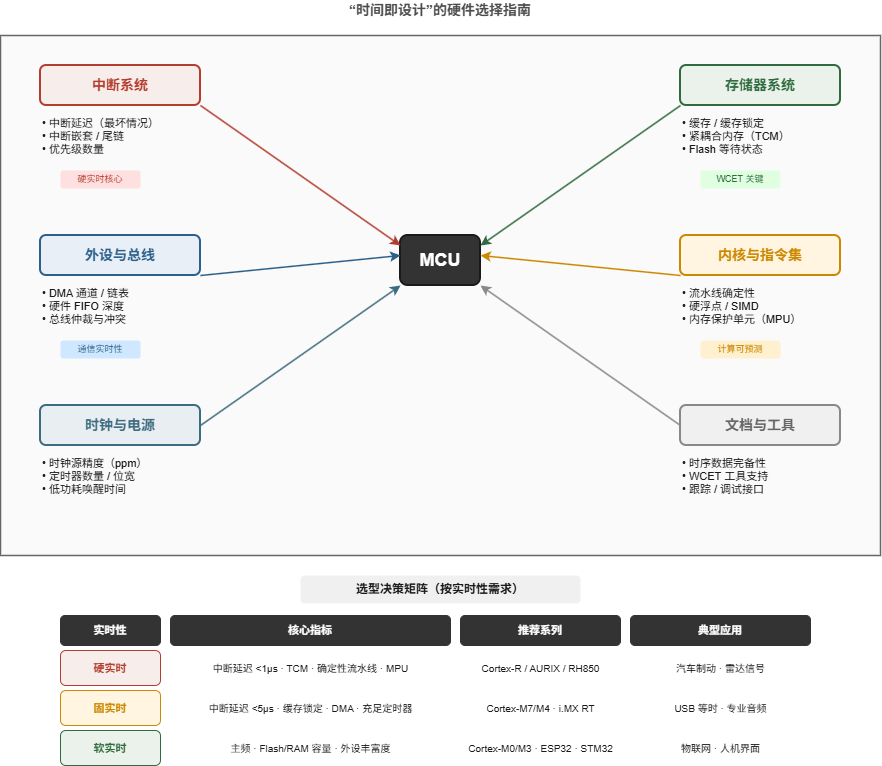
MCU选型中的时间指标:基于"时间即设计"的硬件选择指南
"时间即设计"意味着,在设计系统时就要把时间作为核心约束。对于嵌入式系统,MCU(微控制器)是所有时间承诺的物理基础------它的性能上限直接决定了系统能否满足时间要求。然而,很多工程师在选型时,往往只盯着主频、Flash大小、RAM容量这些"容量型"指标,却忽略了那些直接决定时间确定性的"时序型"指标。
这篇文章,我们就从"时间即设计"的角度,聊聊MCU选型时需要关注哪些时间指标,以及它们对实时性的影响。你会发现,选型本身就是在签订一份关于时间的契约。
一、中断系统:硬实时的基础
任何实时任务最终都要依赖中断来响应外部事件。中断响应能力,是MCU支持硬实时任务的最核心指标。
1.1 中断延迟
定义:从中断信号触发,到第一条中断服务指令执行之间的时间。它包括硬件延迟(CPU采样中断、完成当前指令)和软件延迟(保存上下文、跳转到ISR)。
为什么重要:中断延迟直接决定了系统对外部事件的响应速度。对于硬实时任务,中断延迟必须小于任务截止时间减去处理时间。
选型时关注什么:
- 最坏情况中断延迟:数据手册通常会给出典型值,但硬实时系统需要的是"最大值"。关注是否有"非屏蔽中断"或"快速中断"通道------它们通常有更低的延迟。
- 中断嵌套支持:高优先级中断能否抢占低优先级中断?这对保障关键中断的响应至关重要。
- 尾链(Tail-Chaining):ARM Cortex-M系列支持这项技术,连续中断处理时可以跳过上下文恢复和保存,显著降低延迟。
案例关联 :在FMCW雷达中,ADC采样完成中断必须在下一个采样点前处理完毕。如果中断延迟过大,采样数据就会丢失,测距直接失败。
1.2 中断向量与优先级数量
定义:支持的中断源数量和可配置的优先级级别数。
为什么重要:实时系统通常有多个中断源,需要精细的优先级管理。优先级级别太少,多个关键中断就得挤在同一个优先级上,没法区分重要性。
选型时关注什么:
- 优先级级别数:ARM Cortex-M通常支持8到256级抢占优先级。
- 优先级分组:是否支持抢占优先级和子优先级的分组配置。
案例关联 :在视觉SLAM系统中,相机帧同步中断、IMU数据中断、CAN通信中断等多个中断源需要合理分配优先级,确保最关键的帧同步中断优先处理。
二、存储器系统:时间可预测性的主要限制
存储器访问时间的不确定性,是实时系统面临的最大挑战之一。
2.1 缓存(Cache)的确定性
定义:缓存命中率直接影响指令和数据访问时间。缓存未命中时,访问时间可能增加数倍甚至数十倍。
为什么重要:对于硬实时任务,执行时间必须可预测。缓存带来的不确定性,让最坏情况执行时间(WCET)分析变得极为困难。
选型时关注什么:
- 是否有缓存锁定(Cache Locking)功能:允许把关键代码和数据锁定在缓存中,消除缓存未命中的不确定性。
- 是否有紧耦合内存(TCM):TCM提供单周期访问,且不受缓存影响,是硬实时任务的理想选择。
- 缓存大小与关联度:如果必须用缓存,更大的缓存和更高的关联度可以降低未命中率,但无法完全消除不确定性。
案例关联 :RTOS的任务调度器代码通常锁定在TCM或缓存中,确保上下文切换时间可预测。
2.2 Flash访问时间与等待状态
定义:Flash存储器通常比CPU慢,需要插入等待状态(Wait States)。等待状态数量随主频升高而增加。
为什么重要:代码执行时间直接受Flash等待状态影响。高频MCU从Flash执行代码时,实际性能可能远低于主频。
选型时关注什么:
- Flash加速机制:有没有预取缓冲、指令缓存等加速单元?
- 等待状态与主频的关系:在你目标工作频率下,需要多少个等待状态?
- 是否支持从RAM执行:关键代码能不能搬到RAM中执行,以获得零等待状态?
案例关联 :CAN协议栈的关键路径代码(如报文解析、CRC计算)通常放在RAM中执行,以消除Flash等待状态带来的不确定性。
2.3 内存访问冲突
定义:DMA、CPU、USB、以太网等总线主机同时访问内存时可能产生冲突,导致访问延迟。
为什么重要:多主机同时访问内存时,仲裁机制可能导致CPU访问被延迟。
选型时关注什么:
- 总线矩阵结构:是否有多个总线接口,允许CPU和外设并行访问不同内存区域?
- DMA通道数量与优先级:DMA传输会不会阻塞CPU访问?
- 内存分区:能否把关键数据放在独立的内存区(如DTCM),避免总线冲突?
案例关联 :USB高速数据传输中,DMA与CPU同时访问内存是常态。需要确保USB的DMA传输不会阻塞CPU对关键数据的访问。
三、总线与外设:通信实时性的保障
MCU与外部的通信接口,直接决定了系统的I/O实时性。
3.1 外设的DMA支持
定义:直接存储器访问(DMA)允许外设在无需CPU干预的情况下传输数据。
为什么重要:对于高吞吐量或时间关键的通信,DMA可以大幅降低CPU负载和响应延迟。没有DMA的外设会频繁触发中断,增加中断延迟和CPU负担。
选型时关注什么:
- DMA通道数量:是否足够覆盖所有关键外设?
- DMA传输完成中断优先级:是否可以设置独立优先级?
- 链表DMA(Scatter-Gather):是否支持链式传输,减少CPU配置次数?
案例关联 :MIPI CSI-2 图像采集通常用DMA把图像数据直接传到内存,避免每像素中断;CAN总线也依赖DMA来缓存收发报文。
3.2 通信接口的硬件缓冲
定义:外设内部的FIFO或缓冲区大小。
为什么重要:更大的硬件缓冲可以吸收瞬时数据突发,减少中断频率,降低对响应时间的要求。
选型时关注什么:
- UART/SPI/I2C FIFO深度:较深的FIFO允许CPU以更低频率响应,降低实时性压力。
- USB端点缓冲大小:对于等时传输,足够的端点缓冲可以吸收主机调度抖动。
案例关联 :USB同步传输依赖于端点缓冲来吸收主机微帧之间的微小波动,缓冲不足会导致数据丢失。
3.3 外设与系统总线的连接
定义:外设挂在哪个总线上(AHB、APB等),以及是否有独立的时钟。
为什么重要:不同总线的速度、仲裁机制不同,影响外设访问的确定性和延迟。
选型时关注什么:
- 关键外设是否挂在高速总线上?
- 外设时钟是否独立可调?避免因共享时钟导致的不确定性。
案例关联 :FMCW雷达通过SPI或LVDS接口传输数据,需要确保该接口有足够的带宽和确定性的时序。
四、内核与指令集:计算时间的确定性
CPU内核决定了指令执行的时间特性。
4.1 流水线与分支预测
定义:现代CPU使用流水线和分支预测来提高平均性能,但引入了执行时间的不确定性。
为什么重要:分支预测失败会清空流水线,导致执行时间增加。对于硬实时任务,这种不确定性是不可接受的。
选型时关注什么:
- 是否可以选择关闭分支预测?部分MCU(如ARM Cortex-R系列)允许关闭分支预测以获得确定性。
- 是否有双发射或多发射?多发射流水线的执行时间更难分析。
案例关联 :汽车安全应用常使用Cortex-R系列(如RH850),其流水线设计更注重确定性而非峰值性能。
4.2 SIMD与浮点单元
定义:单指令多数据(SIMD)和浮点单元(FPU)可以加速特定计算,但使用它们会增加WCET分析的复杂性。
为什么重要:SIMD指令的执行时间可能依赖于数据对齐,FPU指令可能有不同延迟(正常、欠流、异常)。
选型时关注什么:
- 是否有硬浮点单元?软浮点实现(通过库函数)的执行时间极难预测。
- SIMD指令的执行时间是否确定?是否有数据对齐要求?
案例关联 :FMCW雷达的FFT计算依赖DSP指令或SIMD加速,需要确保其执行时间可预测。
4.3 内存保护单元(MPU)
定义:MPU允许将内存划分为不同区域,并为每个区域设置访问权限。
为什么重要:MPU是实现任务隔离的关键。通过把关键任务的数据与其他任务隔离开,可以防止任务间的意外干扰,保障时间确定性。
选型时关注什么:
- MPU区域数量:是否足够划分关键任务的内存?
- MPU粒度:最小保护区域大小是多少?
案例关联 :RTOS利用MPU实现任务隔离,防止一个任务的越界访问破坏其他任务的时间确定性。
五、时钟与电源:时间基准的稳定性
时钟和电源的稳定性,直接决定了时间测量的准确性。
5.1 时钟源精度
定义:内部RC振荡器和外部晶振的精度、温漂、老化特性。
为什么重要:所有时间相关的功能------通信波特率、定时器周期、任务调度------都依赖于时钟精度。
选型时关注什么:
- 内部RC振荡器的精度:通常为1%到5%,对于需要精确时序的应用(如CAN)可能不够。
- 是否支持外部晶振:外部晶振可提供更高精度(如±50ppm)。
- 是否有独立的RTC时钟:RTC通常使用32.768kHz晶振,用于低功耗计时。
案例关联 :CAN总线 的位定时要求所有节点的时钟误差在一定范围内(通常<1.5%),否则会导致同步失败。蓝牙的连接间隔精度也依赖时钟。
5.2 定时器资源
定义:通用定时器、高级定时器的数量、位宽、工作模式。
为什么重要:实时系统需要大量定时器来实现周期任务、超时检测、PWM生成等功能。
选型时关注什么:
- 定时器数量和位宽:16位还是32位?32位定时器可以覆盖更长的时间范围而不溢出。
- 定时器间是否可同步:多个定时器是否可以级联或同步?
- 是否有高分辨率定时器:如SysTick、DWT周期计数器。
案例关联 :RTOS 需要一个定时器作为系统滴答(SysTick);USB 需要微帧定时器;PWM控制需要高级定时器。
5.3 电源管理与唤醒时间
定义:从低功耗模式唤醒到正常工作所需的时间。
为什么重要:对于电池供电的实时系统,需要在功耗和响应时间之间权衡。唤醒时间直接影响从睡眠状态响应外部事件的延迟。
选型时关注什么:
- 各低功耗模式的唤醒时间:深度睡眠、待机、停止模式的唤醒时间各不相同。
- 唤醒源:哪些外设和引脚可以在低功耗模式下唤醒CPU?
案例关联 :NFC设备通常处于深度睡眠,当检测到射频场时快速唤醒,在FWT窗口内完成响应。唤醒时间必须小于FWT减去处理时间。
六、文档与工具链:时间分析的基础
硬实时系统需要能够分析最坏情况执行时间(WCET),这依赖于充足的文档和工具支持。
6.1 时序数据的完备性
选型时关注什么:
- 数据手册是否提供指令执行时间的完整列表(包括所有寻址模式、条件执行)?
- 是否提供外设访问时序的最坏情况?
- 是否提供中断延迟的最坏情况(考虑流水线状态)?
案例关联 :DO-178C等高安全标准要求提供WCET证据,缺乏时序数据的MCU无法用于这类认证。
6.2 工具链支持
选型时关注什么:
- 编译器:是否支持生成WCET分析所需的调试信息?是否有优化开关可预测?
- 调试/跟踪接口:是否有ETM/MTB等跟踪单元,用于测量实际执行时间?
- WCET分析工具:是否有商业或开源工具支持该MCU的WCET分析?
案例关联 :汽车电子广泛使用TASKING、Green Hills等编译器,它们对主流MCU(如Infineon AURIX、NXP S32K)有深度支持。
七、选型决策矩阵
基于以上指标,我们可以为不同实时性需求建立一个选型优先级:
| 实时性需求 | 核心指标 | 推荐选择 |
|---|---|---|
| 硬实时(微秒级) | 中断延迟(<1µs)、TCM、确定性流水线、MPU | ARM Cortex-R、Infineon AURIX、Renesas RH850 |
| 固实时(毫秒级) | 中断延迟(<5µs)、缓存锁定、DMA、充足定时器 | ARM Cortex-M7/M4、NXP i.MX RT |
| 软实时(毫秒~秒级) | 主频、Flash大小、RAM容量、外设丰富度 | ARM Cortex-M0/M3、ESP32、STM32主流系列 |
| 混合实时(复杂系统) | 多核隔离、核间通信延迟、功能安全支持 | ARM Cortex-A+M异构、NXP S32、TI Jacinto |
写在最后:"时间即设计"始于选型
MCU选型是"时间即设计"理念落地的第一步。错误的选型,无论后续怎么优化,都无法弥补硬件层面的时间缺陷。正确的选型,需要我们从时间确定性出发,深入理解中断延迟、存储器架构、外设能力、时钟精度这些"时序型"指标,而不是仅仅停留在主频和容量上。
选型时,不妨问自己几个问题:
- 最坏情况下的中断延迟是多少?能不能满足关键任务的截止时间?
- 关键代码的执行时间是否可预测?缓存和Flash等待状态的影响是否可控?
- 通信接口有没有足够的硬件缓冲和DMA支持?
- 定时器资源是否足够支撑所有周期任务和超时监控?
- 有没有足够的文档和工具支持WCET分析?
这些问题没有标准答案,因为每个系统的时间需求不同。但带着这些问题去选型,我们就不再是被动的"参数对比者",而是主动的"时间契约设计者"。
这正是"时间即设计"在硬件上的落实------从第一颗芯片的选型开始,就已经为系统的时间要求打下基础。
预习·自测清单
-
什么是硬实时、固实时和软实时?它们之间的本质区别是什么?
提示:区别在于错过截止时间的后果------灾难性失败(硬实时)、服务质量下降但系统可用(固实时)、仍可容忍(软实时)。硬实时需要绝对保证,软实时只需统计保证。 -
实时性保障的三种核心武器(隔离、调度、补偿)分别解决什么问题?请各举一个文中提到的技术案例。
提示:隔离消除干扰(如FMCW雷达用硬件加速器),调度管理竞争(如CAN优先级仲裁),补偿吸收波动(如视觉SLAM的关键帧缓冲)。 -
为什么说"时间不能靠事后优化"?请从物理耦合、硬件边界和连锁反应三个角度说明。
提示:时间与功能逻辑耦合(CAN的ID既是优先级也是标识符),硬件性能有物理极限(中断延迟、Flash等待状态),实时性是一张多米诺骨牌(前端超时导致定位漂移)。 -
在进行MCU选型时,除了主频和Flash大小,还需要关注哪些关键时间指标?列举至少四个。
提示:最坏情况中断延迟、缓存确定性(有无TCM/锁定)、Flash等待状态与RAM执行支持、DMA通道与外设FIFO深度、定时器资源、MPU支持等。 -
什么是"最坏情况执行时间(WCET)"?为什么硬实时系统必须进行WCET分析?
提示:WCET是任务在最坏输入和环境下所需的最大执行时间。硬实时需要证明该值小于截止时间,仅靠平均性能或常规测试无法覆盖所有极端情况。 -
什么是优先级反转?RTOS通常如何解决这个问题?
提示:高优先级任务被低优先级任务持有的共享资源阻塞。RTOS通过优先级继承协议(临时提升低优先级任务优先级)或优先级天花板协议解决。 -
在软件架构层面,如何体现"时间即设计"?请结合视觉SLAM的例子说明。
提示:将不同时间需求的任务分离------跟踪线程(硬实时)与建图线程(软实时)独立,用关键帧队列解耦,并为每个任务分配明确的时间预算。 -
为什么说"硬件一旦选定,其性能边界就固定了"?请举例说明选型失误的可能后果。
提示:例如MCU中断延迟大于控制周期,则无法满足硬实时;Flash等待状态过多导致代码执行超时;缺乏DMA导致频繁中断使CPU过载。