基于 MATLAB/Simulink 的无刷直流电机(BLDC)转速控制模糊 PID 算法
摘要:针对永磁无刷直流电机(Brushless DC Motor, BLDC)在常规 PI 转速控制下存在的启动超调大、稳态转矩波动剧烈的问题,本文提出一种由三个并行模糊逻辑控制器(Fuzzy Logic Controller, FLC)在线整定 PID 三个增益的调速控制策略。以 48 V/1 kW/700 rpm 等级 BLDC 为控制对象,在 MATLAB/Simulink 环境下以信号流形式搭建电机数学模型,结合六步换相逻辑构成被控对象;进而以转速误差 e 与误差变化率 de 为模糊输入,构建 5×5 共 25 条 Mamdani 规则的模糊推理系统,输出 ΔKp、ΔKi、ΔKd 实时叠加到 PID 基线增益上。仿真结果表明:在 650 rpm 转速指令下,所提方法的转速超调由固定增益 PI 的 28.2% 降至 3.7%,±2% 进入时间由 97 ms 缩短至 19.4 ms;稳态转速误差小于 0.02 rpm,控制效果显著优于固定增益 PI。
关键词:无刷直流电机;模糊 PID;转速控制;Simulink 仿真;anti-windup
1 引言
无刷直流电机以效率高、转矩密度大、可靠性好等优点,在电动汽车、伺服系统、工业自动化等领域应用广泛。其转速控制最常用的方法是经典的 PI 或 PID 控制,结构简单、易于工程实现。然而 BLDC 本身具有强非线性(换相纹波、相电流方波等)、参数不确定(温度引起的 Rs 漂移、负载变化)以及电气-机械时间常数差异大等特点,固定增益 PID 在大范围转速指令下难以兼顾快速性与平稳性:增益高则启动超调与稳态振荡严重,增益低则响应迟缓。
模糊控制具有不依赖精确模型、能够嵌入工程经验、对参数摄动鲁棒的优点,将其与 PID 结合形成"模糊整定 PID"是一类有效折中。本文工作的主要贡献是:
- 在 Simulink 中以信号流形式自建一套 5 维状态的 BLDC 数学模型,配合 Stateflow 实现的六步换相逻辑,避免对 Simscape 物理建模工具箱版本差异的依赖,模型可由脚本程序化生成与重建;
- 构建三个独立的 Mamdani 模糊推理系统,分别对 Kp、Ki、Kd 进行在线整定,并对模糊规则的方向、论域、PID 抗积分饱和模式进行系统性调整以适配本电机参数;
- 在统一的电机对象与统一的工况下,定量比较固定增益 PI 与模糊整定 PID 的瞬态与稳态指标,给出完整的对比证据链。
2 BLDC 数学模型
2.1 状态空间方程
考虑三相星形连接、梯形反电动势的 BLDC,忽略涡流损耗与齿槽转矩,相变量下的电气方程为:
{diadt=1Ls(va−Rsia−ea)dibdt=1Ls(vb−Rsib−eb)dicdt=1Ls(vc−Rsic−ec) \begin{cases} \displaystyle\frac{di_a}{dt}=\frac{1}{L_s}(v_a-R_s i_a - e_a) \\ \displaystyle\frac{di_b}{dt}=\frac{1}{L_s}(v_b-R_s i_b - e_b) \\ \displaystyle\frac{di_c}{dt}=\frac{1}{L_s}(v_c-R_s i_c - e_c) \end{cases} ⎩ ⎨ ⎧dtdia=Ls1(va−Rsia−ea)dtdib=Ls1(vb−Rsib−eb)dtdic=Ls1(vc−Rsic−ec)
机械方程为:
Jdωdt=Te−Bω−TL,dθmdt=ω J\frac{d\omega}{dt}=T_e-B\omega-T_L,\quad \frac{d\theta_m}{dt}=\omega Jdtdω=Te−Bω−TL,dtdθm=ω
电磁转矩由三相瞬时电功率除以机械角速度得到:
Te=eaia+ebib+ecicω T_e=\frac{e_a i_a + e_b i_b + e_c i_c}{\omega} Te=ωeaia+ebib+ecic
三相反电动势 e_a、e_b、e_c 取决于电角度 θ_e = Pp·θ_m,呈 120° 相差的梯形波形,幅值与 ω 成正比、比例系数为反电动势常数 ke。状态向量取 x = i_a, i_b, i_c, ω, θ_m^T,由 Stateflow EMChart 实现状态导数与副输出(i_abc、e_abc、T_e、ω)的同步计算,外部通过 Integrator 块完成 5 维状态积分。
2.2 六步换相
由机械角度 θ_m 经极对数 Pp 映射至电角度 θ_e ∈ 0, 2π),将一个电周期划分为六个 60° 扇区。每个扇区中两相导通、一相悬空,导通极性由扇区号决定,第三相电压取 0。占空比 d ∈ \[0, 1 与母线电压 Vdc 直接相乘得到导通相的端电压幅值,构成最简化的等效驱动方式;该简化省略了 PWM 高频开关纹波,但保留了真实换相纹波,足以体现 BLDC 在控制层面的关键特征。
2.3 电机参数
电机额定参数与电气-机械参数列于表 1。Rs、Ls、ke、Pp 取同等级 48 V/1 kW 商用 BLDC 的经验值;转动惯量 J 与摩擦系数 B 按"机电时间常数 ≈ 2 s"匹配启动响应的时间尺度,并保持 J/B 比例使稳态摩擦转矩量级合理。
| 项 | 符号 | 取值 | 单位 |
|---|---|---|---|
| 母线电压 | Vdc | 48 | V |
| 额定功率 | P_N | 1 | kW |
| 最高转速 | n_max | 700 | rpm |
| 参考转速 | n_ref | 650 | rpm |
| 定子电阻 | Rs | 0.36 | Ω |
| 定子电感 | Ls | 0.6 | mH |
| 反电动势常数 | ke | 0.05 | V·s/rad |
| 极对数 | Pp | 4 | --- |
| 转动惯量 | J | 1×10⁻² | kg·m² |
| 摩擦系数 | B | 5×10⁻³ | N·m·s |
表 1 BLDC 电机仿真参数
3 控制策略
3.1 固定增益 PI 基线
基线控制器采用单转速闭环:
u(t)=Kpe(t)+Ki ∫0t e(τ)dτ,e(t)=nref−n(t) u(t)=K_p e(t)+K_i\!\int_0^t\! e(\tau)d\tau,\quad e(t)=n_{\text{ref}}-n(t) u(t)=Kpe(t)+Ki∫0te(τ)dτ,e(t)=nref−n(t)
输出 u(t) 限幅到 0, 1 作为占空比指令送入换相模块。增益取 (Kp, Ki) = (0.15, 5),由对所提电机模型在 7 组备选值的网格试凑后选定,作为后续模糊整定 PID 的对照基线。
3.2 模糊整定 PID 总体结构
所提模糊整定 PID 控制系统的数据流如图 1 所示。
3.3 模糊推理系统设计
3.3.1 输入隶属度
转速误差 e 论域取 −700, 700 rpm,覆盖最高转速 ±n_max;误差变化率 de 论域取 −60000, 60000 rpm/s,覆盖启动期 |de|_max ≈ 50000 rpm/s。两输入均采用 5 档三角形隶属度,标签为 {NB, NS, Z, PS, PB},对称分布,相邻函数 50% 重叠,如图 2 所示。
3.3.3 规则库
三个 FIS 共享同一张规则表(表 3),共 25 条 Mamdani 规则,去模糊化采用质心法。规则设计的核心思想是:当 |e| 与 |de| 同号且较大时,增大对应方向的 ΔK 以加速响应;当 e 与 de 异号时,减小 ΔK 以抑制超调。
| e \ de | NB | NS | Z | PS | PB |
|---|---|---|---|---|---|
| NB | DB | DB | DB | DS | NC |
| NS | DB | DB | DS | NC | IS |
| Z | DB | DS | NC | IS | IB |
| PS | DS | NC | IS | IB | IB |
| PB | NC | IS | IB | IB | IB |
4 仿真结果
4.1 仿真平台与工况
仿真在 MATLAB R2024b/Simulink 中完成,求解器选择 ,最大步长 ,仿真总时长 。
4.2 开环验证
为验证 BLDC 数学模型的物理正确性,先以恒定占空比 d = 0.3 / 0.5 / 0.8 三档进行开环测试,结果见表 4。
4.3 固定增益 PI 阶跃响应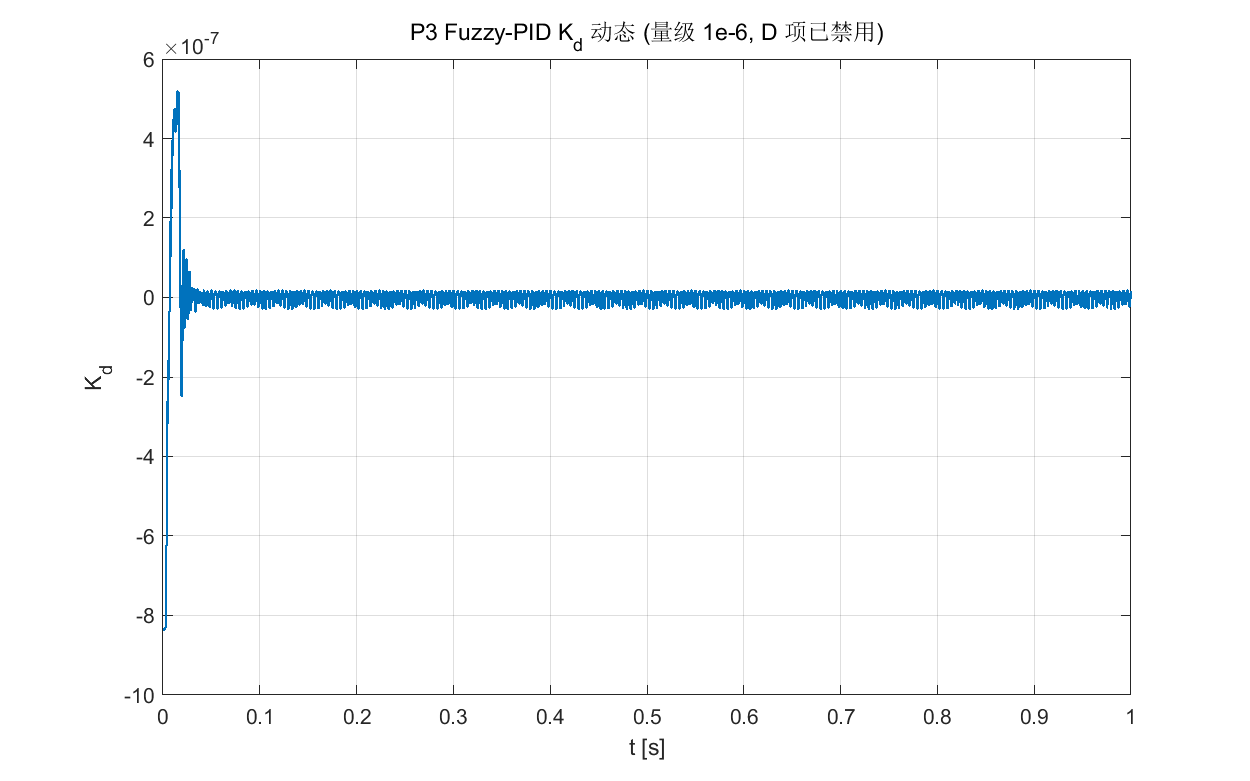
固定增益 PI 在 指令下的转速、占空比、电磁转矩与三相电流响应如图 3 所示。
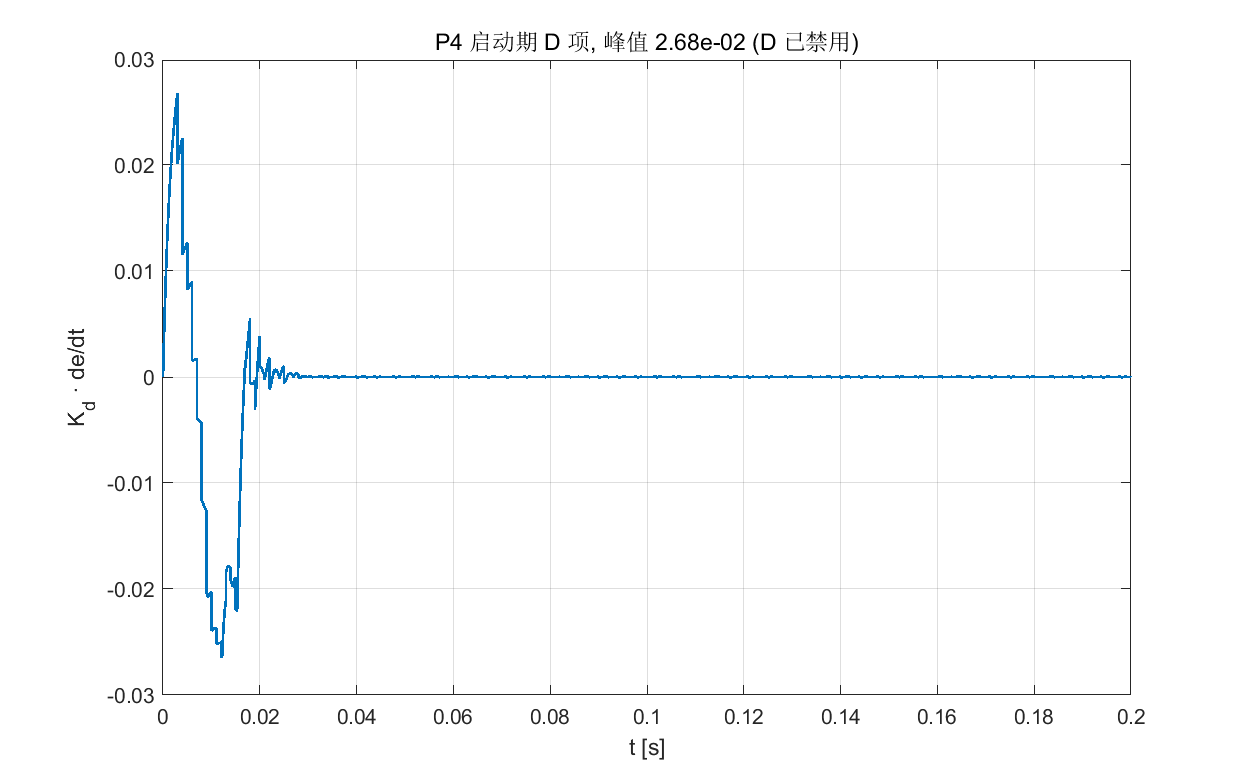
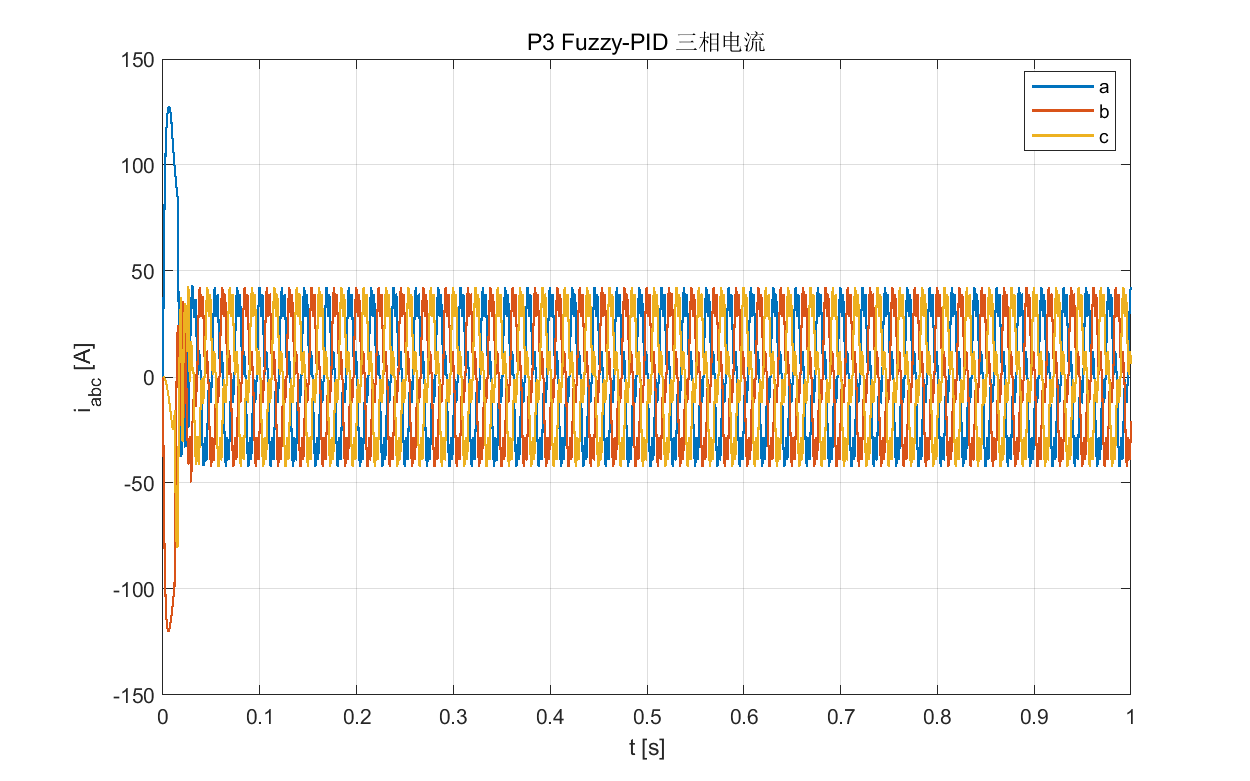
4.4部分结果图
5 结论
本文针对 48 V/1 kW BLDC 电机的转速控制问题,提出并实现了一种由三个 Mamdani 模糊推理系统在线整定 PID 三个增益的控制策略,并在 MATLAB/Simulink 中完成了完整的建模与仿真验证。