一、安装工具链
1.1 安装 CodeX
官方下载即可:
因为 CodeX 是 Microsoft Store/MSIX 形式安装的桌面应用,不容易创建一个桌面快捷方式,我们可以直接让 Codex 自己操作,关于 MSIX 的说明在下面:
直接要求 CodeX 自己生成一个桌面快捷方式,以此来测试一下 CodeX 功能,命令 CodeX:
bash
帮我创建一个codex的桌面快捷方式
至此,我们在桌面得到了应用,现在可以愉快使用了:

1.2 安装 MATLAB MCP
简单来说 MCP 是 AI Coding CIL 工具 (Claude Code、CodeX 等) 与其他 应用通讯的规范协议,其由 JSON 格式实现。 详细请看:
既然是 AI 插件,就让 AI 自己装即可,我们这样命令 CodeX 安装:
bash
帮我装matlab的mcp https://github.com/matlab/matlab-mcp-core-server
1.3 安装 Simulink Agentic Toolkit
Simulink Agentic Toolkit 是一个由 MathWorks 官方发布 Agents。功能是与 Simulink 模型进行交互的扩展工具套件。
它建立在 MATLAB MCP 之上,其 Simulink Agentic Toolkit 包括了几个 MCP Tools 和 Agent Skills。Github 链接请见:
GitHub - matlab/simulink-agentic-toolkit: The Simulink Agentic Toolkit gives your AI agent both the
我们这样命令 CodeX 安装:
bash
安装一下:Simulink Agentic Toolkit 地址:https://github.com/matlab/simulink-agentic-toolkit.git
1.4 检查与使用
1.4.1 在目录中检查
一切都完成后,需要检查我们的 MATLAB MCP 和 Simulink Agentic Toolkit 完整的工具链是否安装和工作正常。
-
首先重启 CodeX 和 Matlab。
-
然后打开 Codex 的配置目录,找到 Config.toml 文件。
其中:
Config.toml 文件是 CodeX 的用户级配置,CodeX 每次启动都会阅读这个文件。
在我的电脑上,这个文件在这个路径:
C:\Users\a2493\.codex\Config.toml
在该文件最下面你应该可以看到:
bash
[mcp_servers.matlab]
command = "C:/Users/a2493/.matlab/agentic-toolkits/bin/matlab-mcp-core-server.exe"
args = ["--matlab-session-mode=existing", "--extension-file=C:\\Users\\a2493\\.matlab\\agentic-toolkits\\simulink\\tools\\tools.json"]
tool_timeout_sec = 600
env_vars = ["WINDIR"]此时说明 matlab-mcp-core-server.exe 在你的 .matlab/ 下,这是正确的。
如果他还在 .codex/ 目录下则你需要提示 CodeX 正确安装了。
1.4.2 在 Matlab 中检查
我们在 Matlab 命令行中执行:
bash
addpath("C:\Users\a2493\.matlab\agentic-toolkits\simulink")
satk_initialize返回:
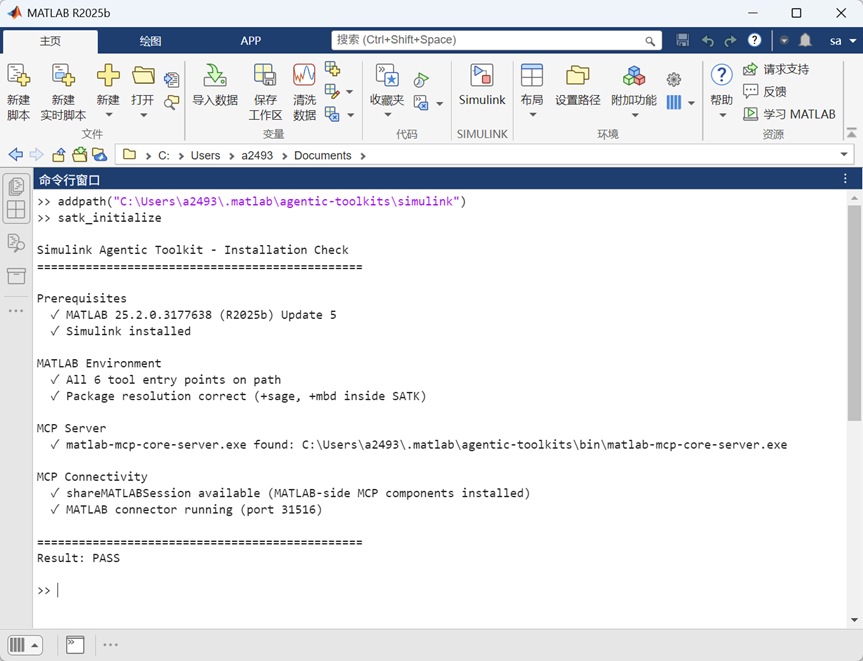
各部分含义如下:
Prerequisites
- MATLAB 与 Simulink 已正确安装。
MATLAB Environment
Toolkit 工具函数已经加入 MATLAB path。
MATLAB package(+sage、+mbd)结构正常。
MCP Server
matlab-mcp-core-server.exe 已找到。
它负责 AI agent 与 MATLAB 之间的通信。
MCP Connectivity
shareMATLABSession 可用:
MATLAB 已开启外部共享接口。
MATLAB connector running:
MATLAB 正在本地端口(如 31516)监听 MCP 连接。
至此,工具链安装完成。
操作界面如下:
1.5 工作原理
整体 Simulink Agent 工作流程:
用户 Prompt → Codex (AI agent) → MCP Tool Call → matlab-mcp-core-server → MATLAB Connector → MATLAB / Simulink
也就是现在的 Simulink Agent 系统可以做到:
输入 → AI 规划 → MCP 调用 → MATLAB 执行 → 返回结果
当我们安装后整套工具链后可以实现:
-
读取 Simulink 模型
-
修改 block 与参数
-
自动连线
-
运行仿真
-
查询模型结构
-
自动生成测试流程
MLATAB 的 AI 工具链在在下面:
二、简单测试我们的工具链效果
2.1 再检查一下工具链
在 CodeX 输入:
cpp
现在 Matlab MCP 和 Simulink Agentic Toolkit 工具安装好了吗 检查一下CodeX 返回:
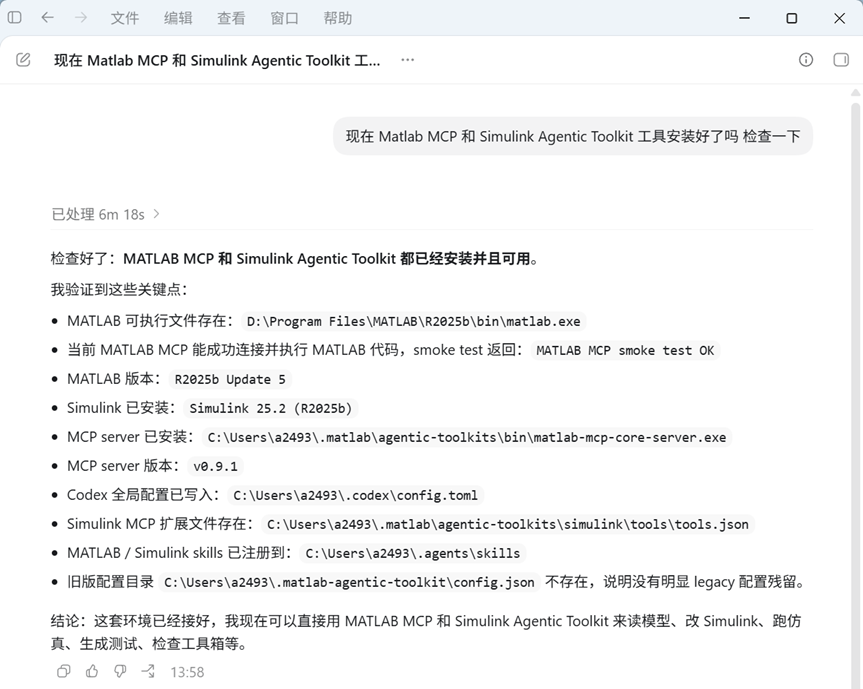
分析还是挺详细的,可以阅读一下。
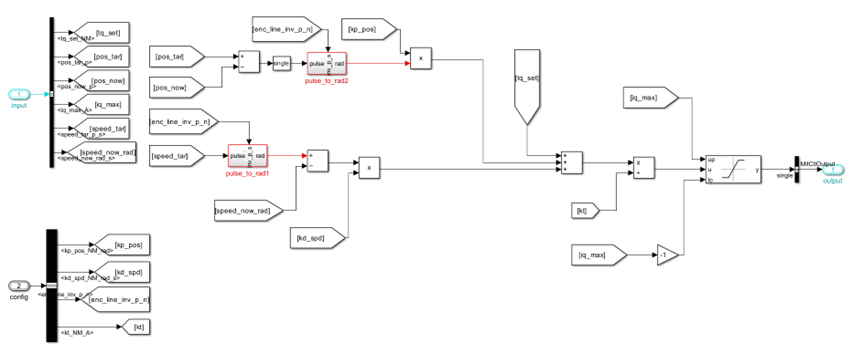
2.2 解读 Simulink 模型
我们尝试让 CodeX 将一个 .slx 模型生成 .md 解析报告给我们看。
让 CodeX 读取 ServoHub 下的 MIT 模式仿真文件:
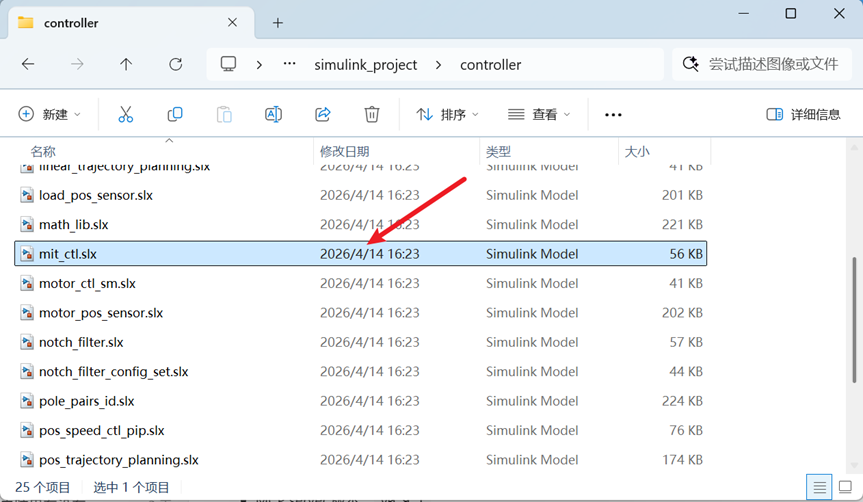
这个内容比较简单,仿真正文如下:
我们向 CodeX 输入:
cpp
C:\Users\a2493\Desktop\servo_hub-master\simulink_project\controller\mit_ctl.slx
阅读一下 生成一个.md 报告说明内容信息C:\Users\a2493\Desktop\servo_hub-master\simulink_project\controller\mit_ctl.slx 阅读一下 生成一个.md 报告说明内容信息
CodeX 就帮我们生成好了:

之后,我们向 CodeX 输入:
cpp
你使用了Simulink Agentic Toolkit内的工具了吗
用 skills了吗输出:
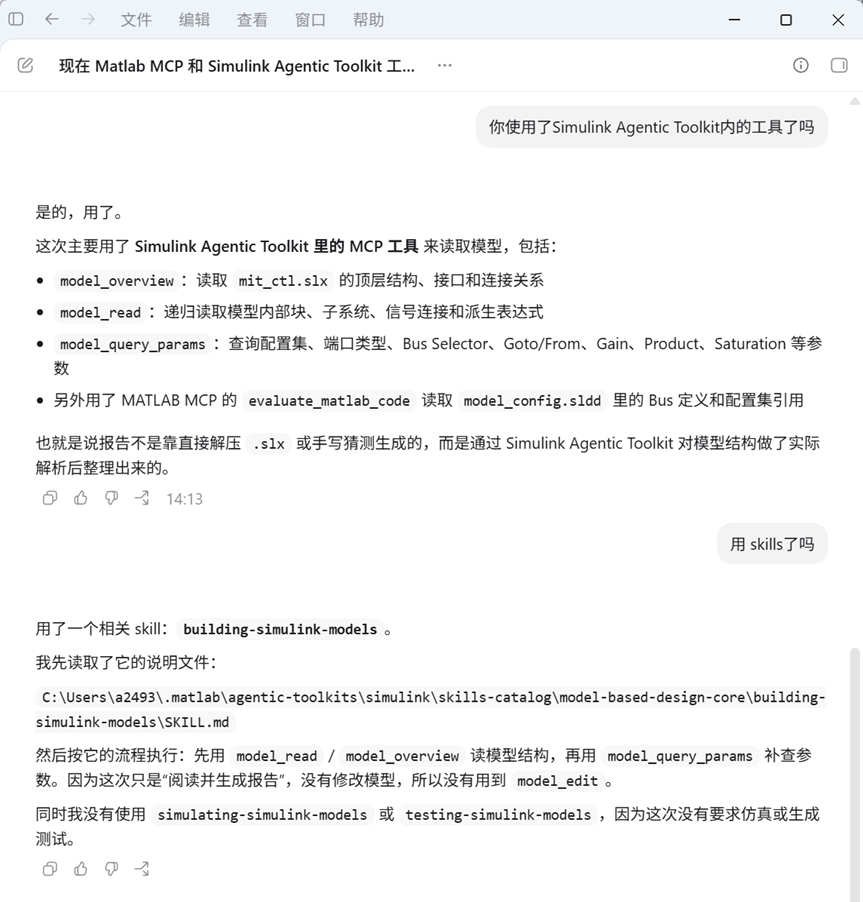
可见 Simulink Agentic Toolkit 确实被使用到了我们的任务之中。
2.3 自动搭建 Simulink 模型
在 CodeX 输入:
cpp
用simulink搭建PMSM三闭环伺服控制系统,掌握"三环结构设计-PI参数整定-轨迹跟踪逻辑",验证其在机器人关节场景中的位置精度与动态性能,并对比双闭环控制凸显优势。
将整个项目都在我桌面的ai_test文件夹中搭建 ,关于创建和执行的命令不要再咨询我是否同意。CodeX 返回:

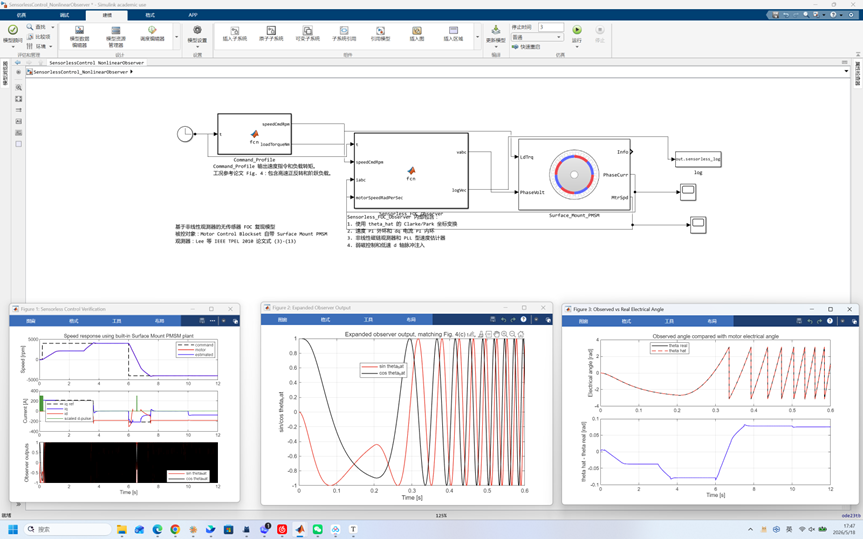
2.4 复现非线性磁链观测器论文
在 CodeX 输入:
cpp
复现我发给你的论文。使用 simulink 自带的 Surface Mount PMSM 模块验证。
将整个项目都在我桌面的 Sensorless Control 文件夹中搭建,关于创建和执行的命令不要再咨询我是否同意。然后把这篇最经典的非线性磁链观测器的论文发给他:
18 分钟后就复现好了:
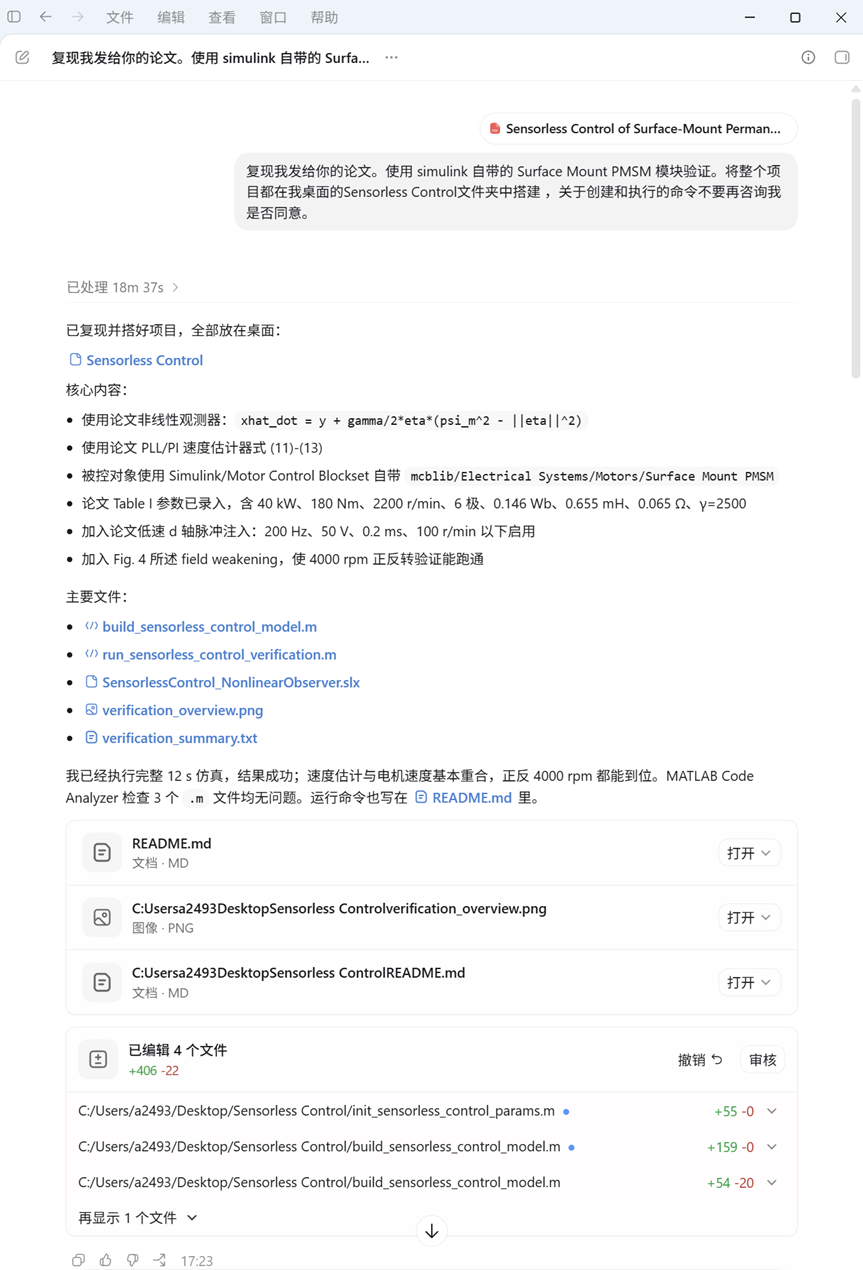
观测正确: