车道线检测:去噪 -> 找边缘 -> 只要特定区域(梯形)的边缘 -> 用数学方法(霍夫变换)把这些零散的边缘点拟合成直线 -> 画在原图上。
文章目录
- 1、代码流程
-
- [1. 导入库与初始化](#1. 导入库与初始化)
- [2. 读取图像与灰度化](#2. 读取图像与灰度化)
- [3. 高斯模糊(降噪)](#3. 高斯模糊(降噪))
- [4. Canny 边缘检测](#4. Canny 边缘检测)
- [5. 定义并绘制感兴趣区域 (ROI)](#5. 定义并绘制感兴趣区域 (ROI))
- [6. 应用掩膜(抠图)](#6. 应用掩膜(抠图))
- [7. 霍夫变换 (Hough Transform) 参数设置](#7. 霍夫变换 (Hough Transform) 参数设置)
- [8. 执行霍夫变换并画线](#8. 执行霍夫变换并画线)
- [9. 融合图像并保存结果](#9. 融合图像并保存结果)
- 2、输出结果
- 3、完整代码
- 4、参考
这段代码是一个非常经典的计算机视觉流程,主要用于在图像中检测车道线。它涵盖了从图像读取、预处理、边缘检测到霍夫变换找直线的完整过程。
1、代码流程
1. 导入库与初始化
python
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import numpy as np
import cv2
plot_vertices = True- 导入库 :
matplotlib用于显示和保存图片,numpy用于矩阵运算,cv2(OpenCV)是核心的图像处理库。 plot_vertices = True:这是一个开关变量。设置为True时,程序会额外生成一张画出了感兴趣区域(ROI)边界的图片,方便调试查看框选的位置对不对。
2. 读取图像与灰度化
python
image = mpimg.imread('./demo/1.jpg')
gray = cv2.cvtColor(image,cv2.COLOR_RGB2GRAY)- 读取图片:加载原始彩色图像。
- 灰度转换:将彩色的RGB图像转换为单通道的灰度图。因为后续的边缘检测只需要亮度信息,不需要颜色,灰度化可以大幅减少计算量。
3. 高斯模糊(降噪)
python
kernel_size = 5
blur_gray = cv2.GaussianBlur(gray,(kernel_size, kernel_size),0)- 高斯模糊:使用一个 5x5 的内核对灰度图进行平滑处理。
- 目的:消除图像中的噪点(比如路面的细小纹理、光照杂点)。如果不做这一步,Canny边缘检测会把很多噪点误判为边缘。
4. Canny 边缘检测
python
low_threshold = 50
high_threshold = 150
edges = cv2.Canny(blur_gray, low_threshold, high_threshold)- Canny算法:这是目前最主流的边缘检测算法。
- 阈值设定 :像素梯度变化大于 150 的肯定是边缘;小于 50 的肯定不是;介于两者之间的,如果它与强边缘相连则保留,否则丢弃。输出结果
edges是一张黑白二值图,白色代表检测到的边缘。
5. 定义并绘制感兴趣区域 (ROI)
python
mask = np.zeros_like(edges)
ignore_mask_color = 255
imshape = image.shape
# 定义一个四边形的顶点坐标(梯形),用来框定车道的大致范围
vertices = np.array([[(100,imshape[0]),(285, 205), (340, 205), (imshape[1]-50,imshape[0])]], dtype=np.int32)
if plot_vertices:
roi_visualization = np.copy(image)
# 在原图上用绿色线条画出这个四边形区域
cv2.polylines(roi_visualization, [vertices], isClosed=True, color=(0, 255, 0), thickness=5)
plt.figure(figsize=(10, 6))
plt.imshow(roi_visualization)
plt.title('Region of Interest (ROI) Boundary')
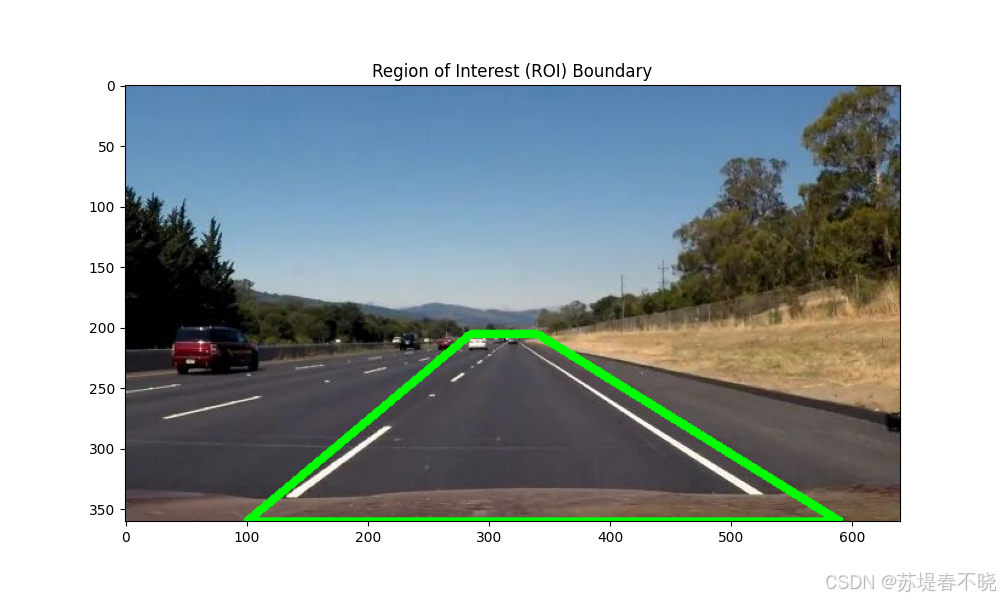
plt.savefig("./demo/vertices.png")- 创建掩膜(Mask):先创建一个和边缘图大小一样的全黑图片。
- 定义顶点:这里定义了一个梯形(四个坐标点,依次为左下,左上,右上,右下)。逻辑是:我们只关心图片下方大概车道所在的位置,天空、旁边的树木等区域的边缘对我们没用,需要过滤掉。
- 可视化部分 :如果开关打开,就用
cv2.polylines把这个梯形画在原图上并保存,方便确认框选的位置是否准确。
6. 应用掩膜(抠图)
python
cv2.fillPoly(mask, vertices, ignore_mask_color)
masked_edges = cv2.bitwise_and(edges, mask)- 填充多边形 :把刚才定义的梯形区域在
mask图上涂成白色(255),其他区域保持黑色。 - 按位与操作 :将
edges(边缘图)和mask(梯形白块)进行"与"运算。 - 效果:只保留了梯形区域内的边缘线条,梯形以外的边缘全部被清零(变黑)。
7. 霍夫变换 (Hough Transform) 参数设置
python
rho = 1
theta = np.pi/180
threshold = 1
min_line_length = 5
max_line_gap = 1
line_image = np.copy(image)*0 - 霍夫变换原理:将图像空间的直线映射到参数空间(极坐标系)来找线。
rho:距离分辨率,1表示网格步长为1像素。theta:角度分辨率,这里是1度(π/180弧度)。threshold:投票门槛。设为 1 表示只要有 1 个点落在同一条参数线上,就认为这是一条直线(这个值设得非常小,通常为了检测短线条)。min_line_length:过滤掉长度小于 5 像素的短线段。max_line_gap:允许线段之间有最大 1 像素的断裂,依然把它们连成一条线。line_image:创建一张纯黑的空白图,准备在上面画红线。
8. 执行霍夫变换并画线
python
lines = cv2.HoughLinesP(masked_edges, rho, theta, threshold, np.array([]),
min_line_length, max_line_gap)
for line in lines:
for x1,y1,x2,y2 in line:
cv2.line(line_image,(x1,y1),(x2,y2),(255,0,0),10)cv2.HoughLinesP:概率霍夫变换,直接输出线段的起点(x1,y1)和终点(x2,y2)。- 循环画线 :遍历检测到的所有线段,在黑色的
line_image上用红色(255,0,0)、粗细为 10 的线条把它们画出来。
9. 融合图像并保存结果
python
color_edges = np.dstack((edges, edges, edges))
lines_edges = cv2.addWeighted(color_edges, 0.8, line_image, 1, 0)
plt.imshow(lines_edges)
plt.savefig('./demo/output1.png')- 扩展通道 :
edges原本是单通道灰度图,这里把它复制三份叠在一起变成三通道(看起来还是黑白的),以便能和彩色的线条图叠加。 - 加权融合 (
addWeighted) :公式为dst = src1 * alpha + src2 * beta + gamma。- 这里把边缘图权重设为 0.8,红线图权重设为 1。
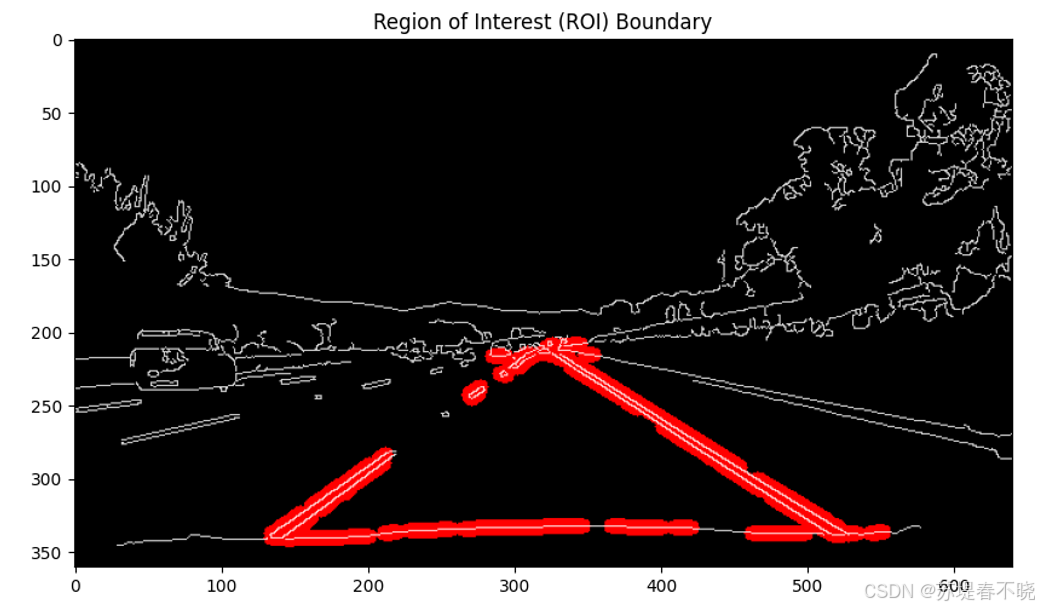
- 效果:最终图片上既能看到淡淡的原图边缘轮廓,又能清晰地看到加粗红色的检测出的车道线。
- 保存:将最终结果保存为图片。
2、输出结果
输入图片

设定的梯形区域
拟合出来的结果
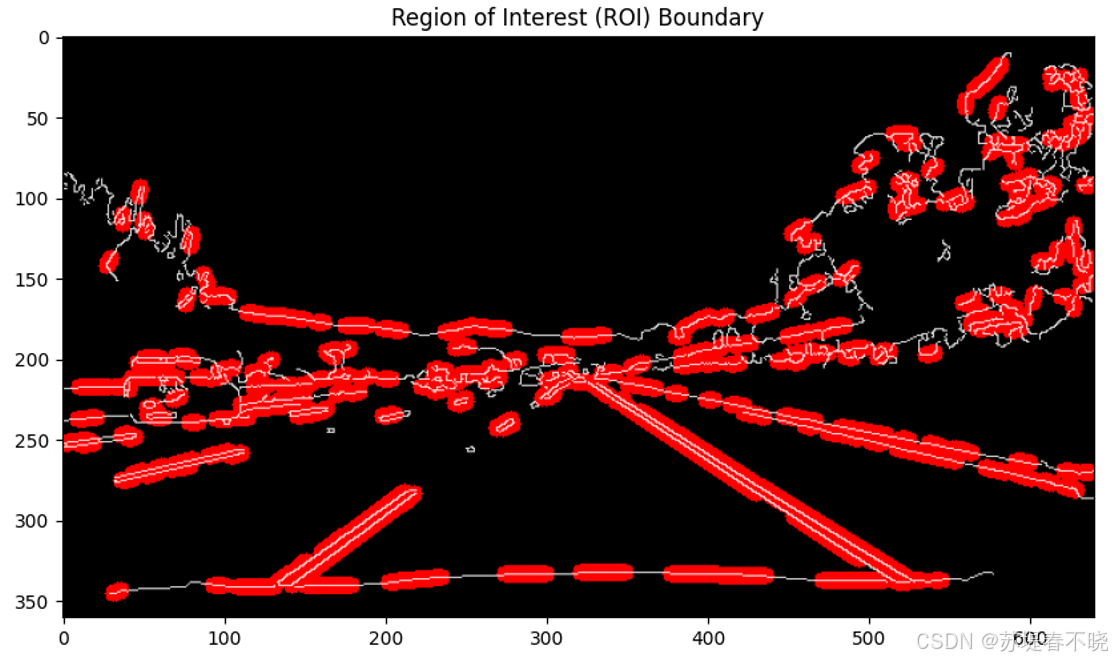
如果不设定梯形区域,也即
python
vertices = np.array([[(0,imshape[0]),(0, 0), (imshape[1], 0), (imshape[1],imshape[0])]], dtype=np.int32) # all image
# vertices = np.array([[(100,imshape[0]),(285, 205), (340, 205), (imshape[1]-50,imshape[0])]], dtype=np.int32) # defining a quadrilateral region得到的结果为
3、完整代码
py
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import numpy as np
import cv2
plot_vertices = True
# Read in and grayscale the image
image = mpimg.imread('./demo/1.jpg')
gray = cv2.cvtColor(image,cv2.COLOR_RGB2GRAY)
# Define a kernel size and apply Gaussian smoothing
kernel_size = 5
blur_gray = cv2.GaussianBlur(gray,(kernel_size, kernel_size),0)
# Define our parameters for Canny and apply
low_threshold = 50
high_threshold = 150
edges = cv2.Canny(blur_gray, low_threshold, high_threshold)
# Next we'll create a masked edges image using cv2.fillPoly()
mask = np.zeros_like(edges)
ignore_mask_color = 255
# This time we are defining a four sided polygon to mask
imshape = image.shape
# vertices = np.array([[(0,imshape[0]),(0, 0), (imshape[1], 0), (imshape[1],imshape[0])]], dtype=np.int32) # all image
vertices = np.array([[(100,imshape[0]),(285, 205), (340, 205), (imshape[1]-50,imshape[0])]], dtype=np.int32) # defining a quadrilateral region
if plot_vertices:
# 创建一个用于绘制 ROI 边界的图像副本
roi_visualization = np.copy(image)
# 将 vertices 转换为适合 cv2.polylines 的格式
# isClosed=True 表示最后一点和第一点自动连接,形成封闭图形
cv2.polylines(roi_visualization, [vertices], isClosed=True, color=(0, 255, 0), thickness=5)
# 展示包含 ROI 框的图像
plt.figure(figsize=(10, 6))
plt.imshow(roi_visualization)
plt.title('Region of Interest (ROI) Boundary')
plt.savefig("./demo/vertices.png")
cv2.fillPoly(mask, vertices, ignore_mask_color)
masked_edges = cv2.bitwise_and(edges, mask)
# Define the Hough transform parameters
# Make a blank the same size as our image to draw on
rho = 1 # distance resolution in pixels of the Hough grid
theta = np.pi/180 # angular resolution in radians of the Hough grid
threshold = 1 # minimum number of votes (intersections in Hough grid cell)
min_line_length = 5 #minimum number of pixels making up a line
max_line_gap = 1 # maximum gap in pixels between connectable line segments
line_image = np.copy(image)*0 # creating a blank to draw lines on
# Run Hough on edge detected image
# Output "lines" is an array containing endpoints of detected line segments
lines = cv2.HoughLinesP(masked_edges, rho, theta, threshold, np.array([]),
min_line_length, max_line_gap)
# Iterate over the output "lines" and draw lines on a blank image
for line in lines:
for x1,y1,x2,y2 in line:
cv2.line(line_image,(x1,y1),(x2,y2),(255,0,0),10)
# Create a "color" binary image to combine with line image
color_edges = np.dstack((edges, edges, edges))
# Draw the lines on the edge image
lines_edges = cv2.addWeighted(color_edges, 0.8, line_image, 1, 0)
plt.imshow(lines_edges)
plt.savefig('./demo/output1.png')
# plt.show()4、参考
- python实现简单的车道线检测(2023-11-26)