文章目录
- 概述
- 引脚和工作模式选择
- W25Q64通信实验接线
- SPI通信引脚和外设的初始化
-
- 代码部分
- [为什么设置为mode0和MSB First](#为什么设置为mode0和MSB First)
- 数据收发函数
- 从机片选与取消片选函数
概述
到此为止,关于SPI通信的时序,STM32的SPI外设,这些内容,我们都基本搞清楚了。
所以我们先来写一部分代码,我们按照顺序来完成:
- 单片机SPI通信的引脚和工作模式选择
- 单片机与W25Q64通信实验接线
- SPI通信引脚和外设的初始化
除此之外,我们还需要来实现一个"与从机无关的、通用的"SPI通信数据交换函数。
引脚和工作模式选择
首先我们选择的SPI外设是:SPI1
它挂载在时钟频率默认是72MHz的APB2外设总线上。
《参考手册》的AFIO模块提供了各个外设的引脚复用、重定义选择。
比如SPI1外设,如下图所示:
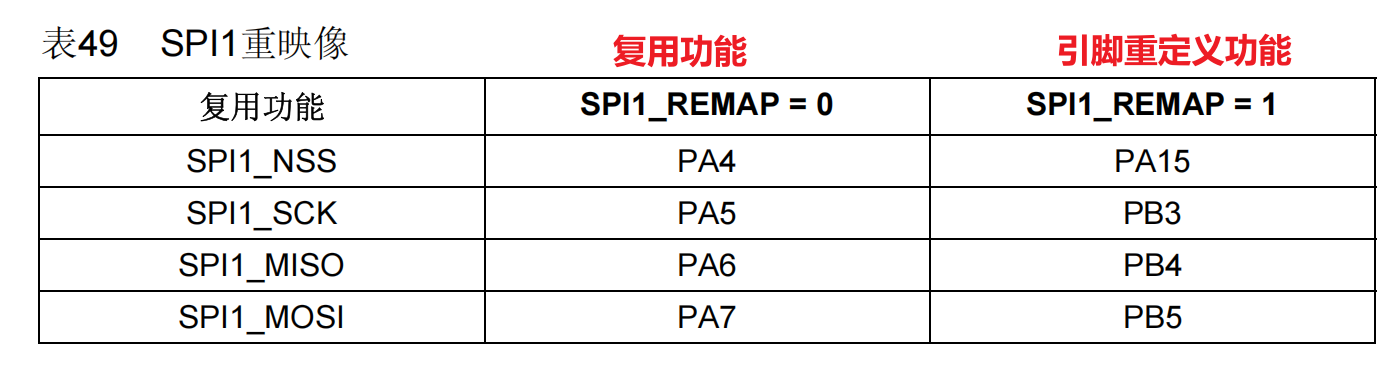
直接查手册,而不是查引脚定义表,更方便一些。
所以我们选择的引脚是:
SPI1_SCK ---- PA5
SPI1_MISO ---- PA6
SPI1_MOSI ---- PA7
SPI1_NSS ---- 不使用,直接配置软件NSS即可
那么这些引脚都需要配置成什么工作模式呢?
《参考手册》的"GPIO外设配置"小节中,也对外设使用GPIO引脚时,设置的工作模式做了推荐。
SPI外设的推荐工作模式,如下图所示:
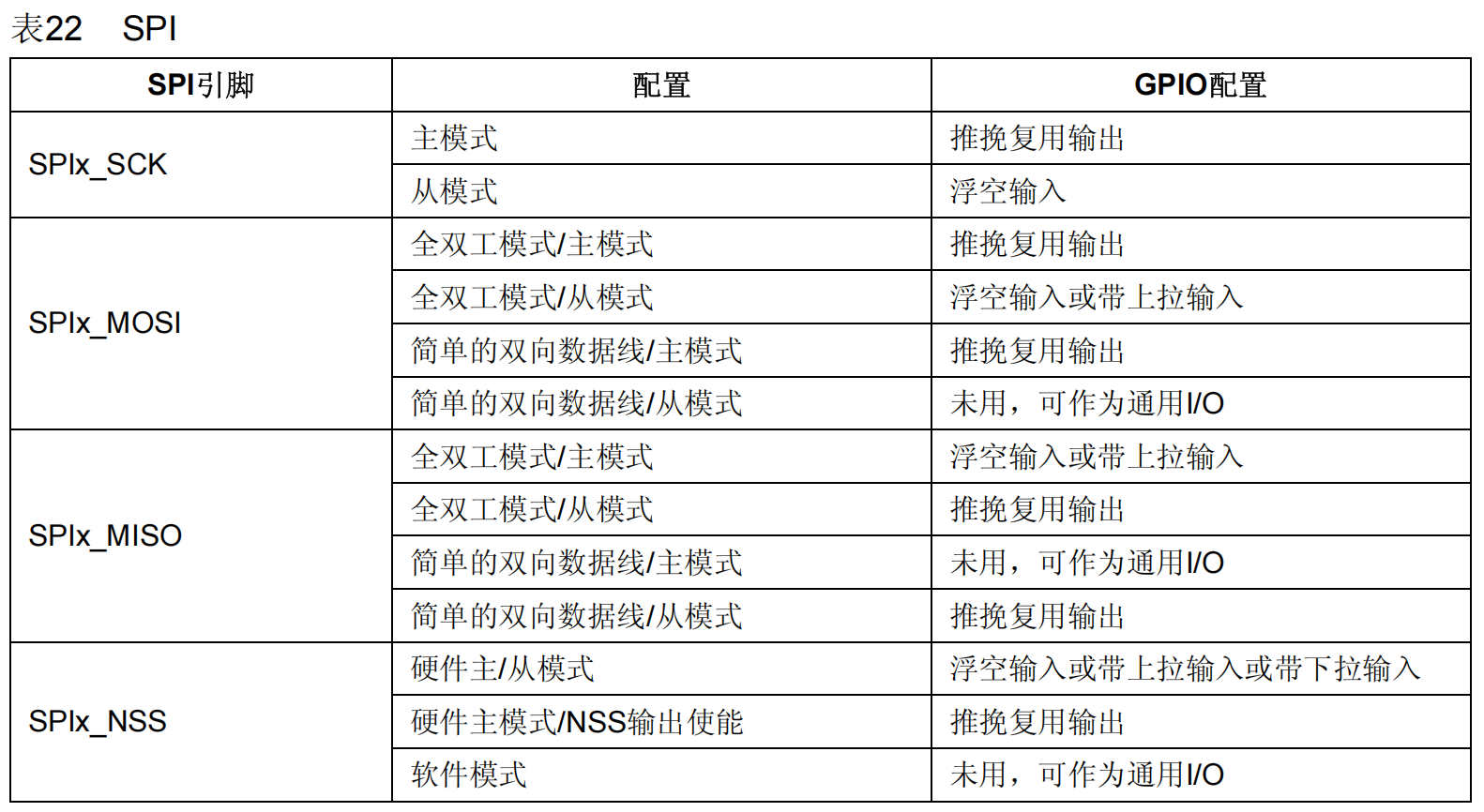
最终结论是:
SPI1_SCK,即单片机的PA5引脚,设置工作模式为推挽复用输出模式。
SPI1_MISO,即单片机的PA6引脚,设置工作模式为浮空输入模式。
SPI1_MOSI,即单片机的PA7引脚,设置工作模式为推挽复用输出模式。
其中SCK和MOSI引脚,都需要强推输出高低电平,所以选择推挽输出模式,将输出控制权交给SPI1外设,所以是复用推挽输出模式。
MISO引脚需要接收从机的输入,所以选择浮空输入模式是最常见、最推荐的。
上拉输入模式也可以选择的,和浮空输入区别不大。
但不能选择下拉输入模式,下拉输入模式中的下拉电阻对整个通信的过程是有害的。
最后还需要选择一个普通GPIO引脚,作为单片机连接从机片选NSS引脚的控制引脚。
W25Q64通信实验接线
首先,拿出设备盒中的W25Q64,如下图所示:

然后按照下列方式进行接线:
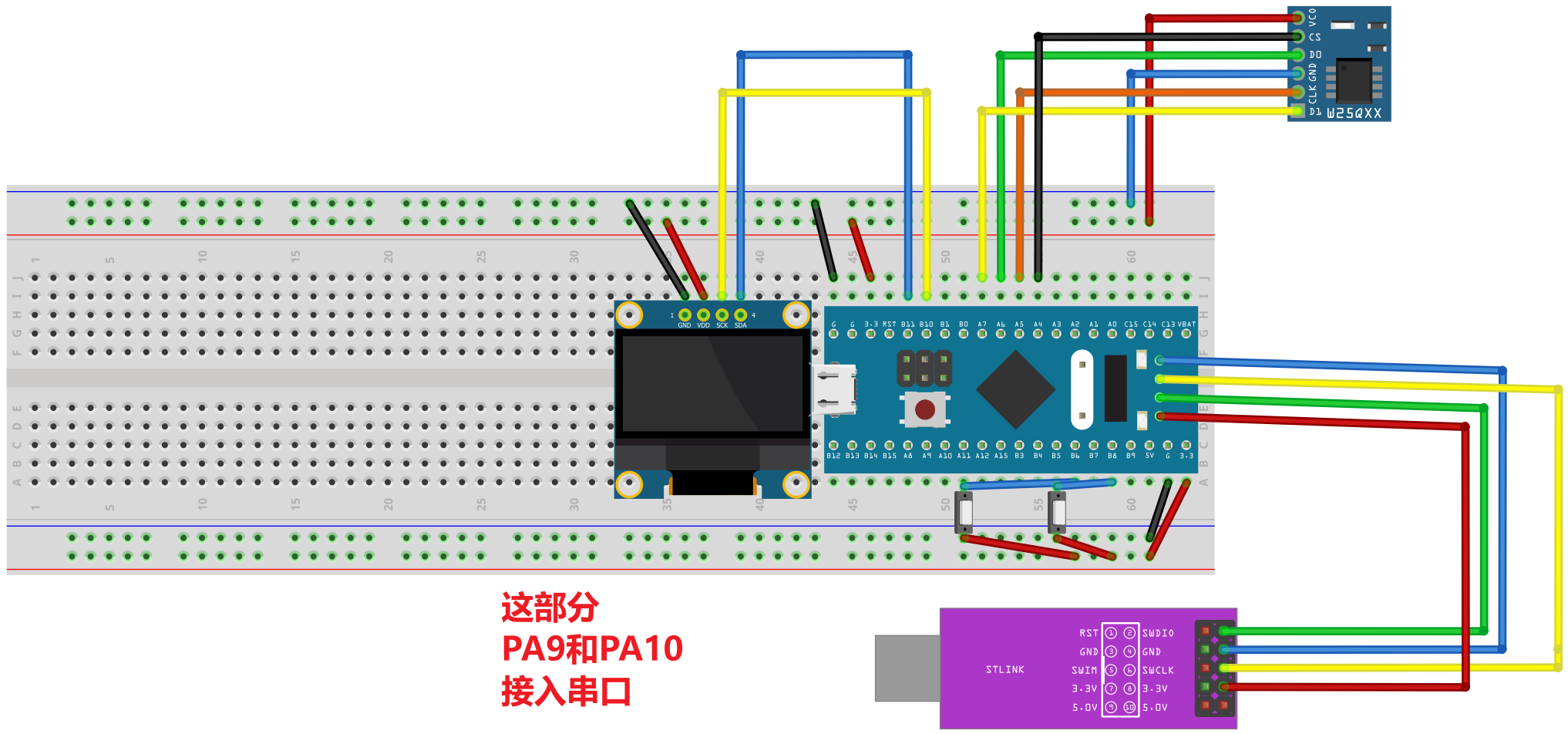
说明一下这张图:
- PA9和PA10是用于接入PC端USB转串口设备的,图中没有画出,但你要把线接好,我们做实验会用到串口。
- 关于W25Q64是什么,怎么用,会在下一文中阐述
- W25Q64的6个引脚都需要接入面包板,需要用六根"公对母"杜邦线。
- 接线的时候要认真仔细,不要接错了。
W25Q64的CS片选引脚 ---- 单片机PA4引脚(普通IO引脚)
W25Q64的DO输出引脚 ---- 单片机PA6引脚(MISO)
W25Q64的CLK时钟引脚 ---- 单片机PA5引脚(CLK)
SPI通信引脚和外设的初始化
到这里,我们就可以开始进行通信引脚的初始化工作,以及SPI外设的初始化工作。
当然,本章节还无法看到实验现象,只能完成一些基础的、关于SPI的初始化配置的工作。
具体的实验环节,还需要到下一文中
首先我们在工程模版的基础上,新建一个"W25Q64"模块,创建对应头文件和实现源文件。
代码部分
全部的代码先贴在这里,里面需要着重讲述的放在后面文字叙述
c
// W25Q64.h头文件
#ifndef __W25Q64_H
#define __W25Q64_H
#include "stm32f10x.h"
void init_W25Q64(void);
#endif
c
// W25Q64.c源文件
#include "./W25Q64.h"
#define NSS GPIO_Pin_4
#define SCK GPIO_Pin_5
#define MISO GPIO_Pin_6
#define MOSI GPIO_Pin_7
#define SPI_PORT GPIOA
#define GPIO_SPI_CLOCK RCC_APB2Periph_GPIOA
#define SPI_CLOCK RCC_APB2Periph_SPI1
#define SPIX SPI1
// 初始化引脚
static void init_GPIO_W25Q64(void){
// 开时钟
RCC_APB2PeriphClockCmd(GPIO_SPI_CLOCK, ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
// 速度选择50MHz,保证SPI的通信速度
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
// 初始化SCK,作为主机,所以选择复用推挽模式
GPIO_InitStruct.GPIO_Pin = SCK;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(SPI_PORT, &GPIO_InitStruct);
// 初始化MISO,作为主机,所以选择浮空输入模式
GPIO_InitStruct.GPIO_Pin = MISO;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(SPI_PORT, &GPIO_InitStruct);
// 初始化MOSI,作为主机,所以选择复用推挽模式
GPIO_InitStruct.GPIO_Pin = MOSI;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(SPI_PORT, &GPIO_InitStruct);
// 初始化NSS, 选择通用推挽,输出高电平,表示不选中从机
GPIO_InitStruct.GPIO_Pin = NSS;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(SPI_PORT, &GPIO_InitStruct);
GPIO_SetBits(SPI_PORT, NSS);
}
// 初始化外设
void init_SPI(void){
// 初始化引脚
init_GPIO_W25Q64();
// 开启SPI时钟
RCC_APB2PeriphClockCmd(SPI_CLOCK, ENABLE);
// 初始化SPI
SPI_InitTypeDef SPI_InitStruct;
// SPI1时钟线分频系数:当前选择1/4分频
// 时钟线频率为:72 / 4 = 18MHz
SPI_InitStruct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4;
// 设置第一边沿
SPI_InitStruct.SPI_CPHA = SPI_CPHA_1Edge;
// 设置时钟极性 低电平为空闲
SPI_InitStruct.SPI_CPOL = SPI_CPOL_Low ;
// 不设置校验,故不设置多项式校验
//SPI_InitStruct.SPI_CRCPolynomial = ;
// 外设移位寄存器为8bit
SPI_InitStruct.SPI_DataSize = SPI_DataSize_8b ;
// 全双工
SPI_InitStruct.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
// MSB
SPI_InitStruct.SPI_FirstBit = SPI_FirstBit_MSB;
// 主机模式
SPI_InitStruct.SPI_Mode = SPI_Mode_Master;
// 软件实现
SPI_InitStruct.SPI_NSS = SPI_NSS_Soft;
// 初始化SPI
SPI_Init(SPIX, &SPI_InitStruct);
// 选择软件NSS时,需要额外调用此函数,用于设置SSI为1,代表输入高电平
SPI_NSSInternalSoftwareConfig(SPIX, SPI_NSSInternalSoft_Set);
// 使能开启SPI1
SPI_Cmd(SPIX, ENABLE);
}
// 数据交换
// SPI通信实质上是两个移位寄存器进行数据交换
static uint8_t SwapByte(uint8_t Byte){
// 等待发送寄存器为空
while( SPI_I2S_GetFlagStatus(SPIX, SPI_I2S_FLAG_TXE) == RESET);
// 发送寄存器为空,发送数据
SPI_I2S_SendData(SPIX, Byte);
// 等待接收寄存器为空
while( SPI_I2S_GetFlagStatus(SPIX, SPI_I2S_FLAG_RXNE) == RESET);
// 接收数据
return SPI_I2S_ReceiveData(SPIX);
}
// 选中W25Q64(CS = 0)
static void W25Q64_Select(void) {
GPIO_ResetBits(SPI_PORT, NSS);
}
// 取消选中W25Q64(CS = 1)
static void W25Q64_Deselect(void) {
GPIO_ResetBits(SPI_PORT, NSS);
}为什么设置为mode0和MSB First
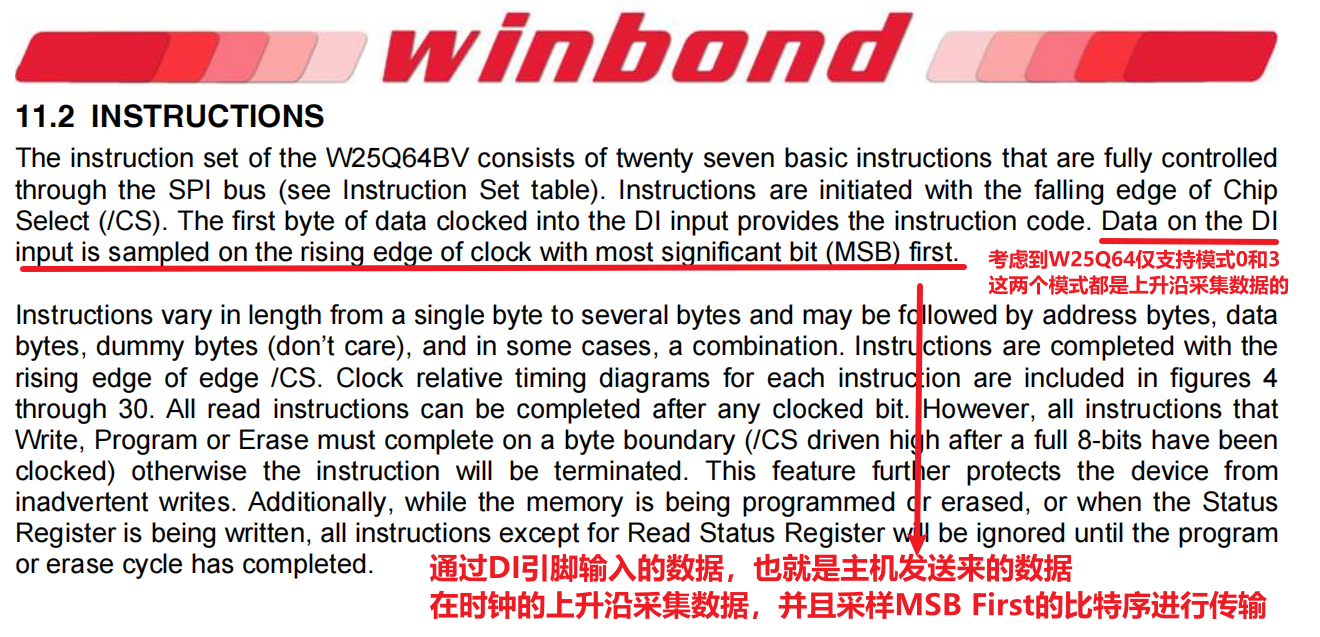
我们在前面讲时序结构时,提到过:SPI通信协议提供了多种时序结构可选择,主要目的就是为了适配不同从机对时序的要求。
所以,之所以这么设置时序结构,都是从机W25Q64 的要求。
那我怎么知道这是W25Q64 从机的要求呢?
当然不是我猜的,而是通过查阅W25Q64 的官方文档得知的。如下图所示:
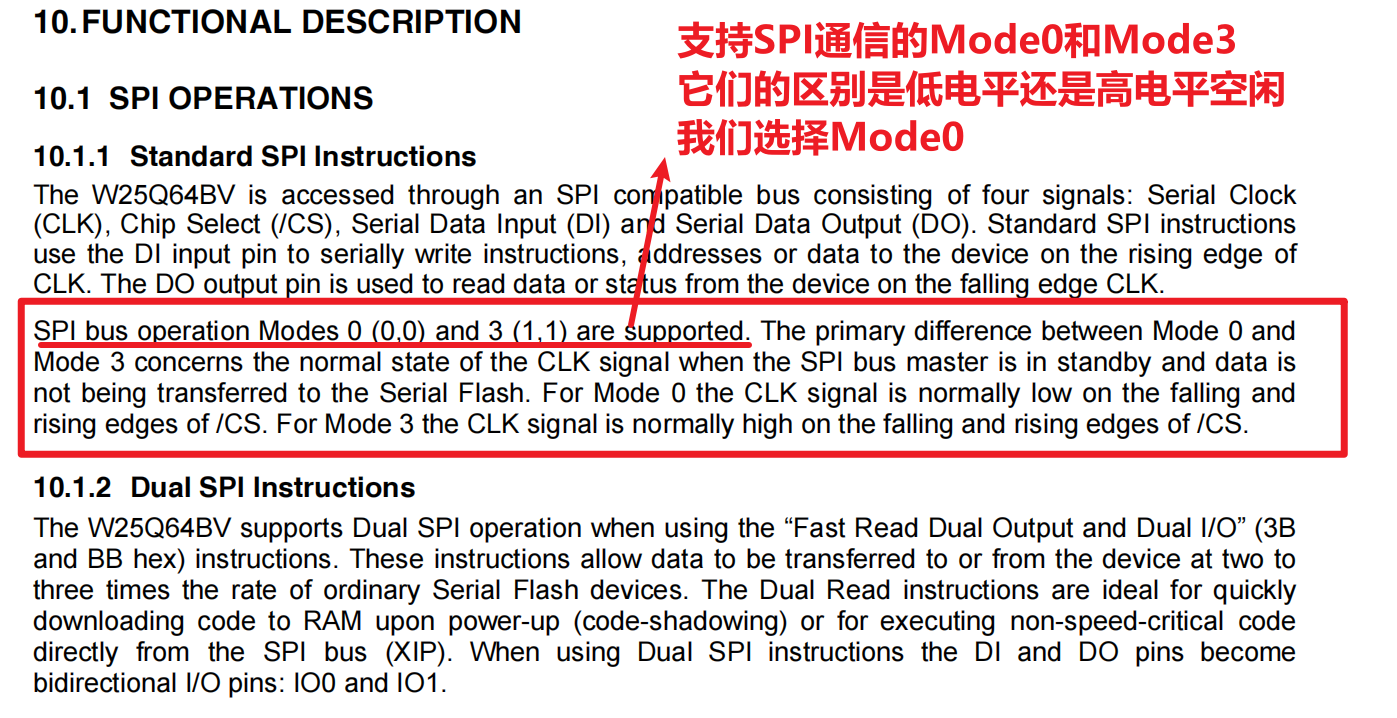
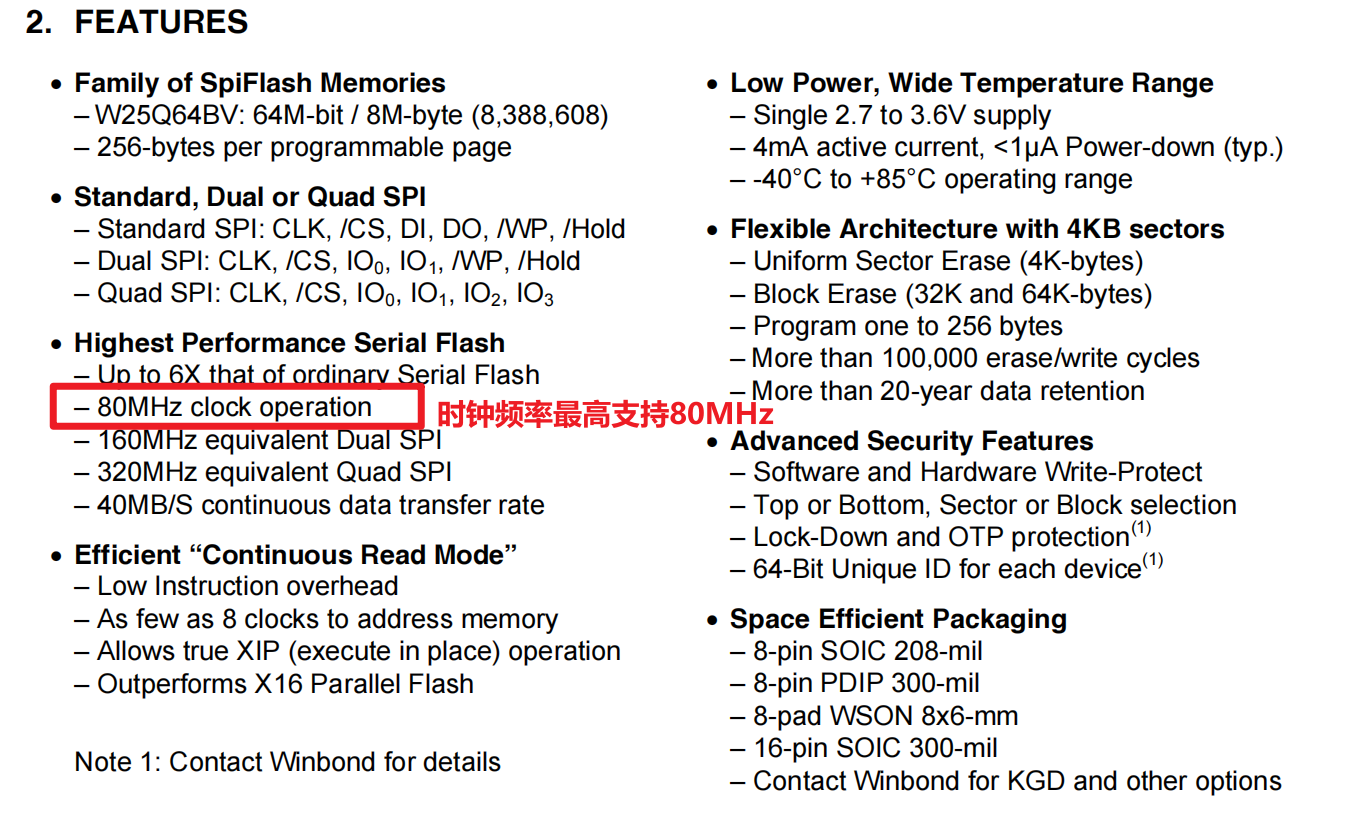
我们还设置了SPI时钟频率是18MHz,这个设置相对比较保守,主要考虑到我们使用面包板接线,电路不是非常稳定。
实际上你完全可以设置得更高一些(36MHz),因为W25Q64 的官方文档中,有如下内容:
数据收发函数
在串口和I2C通信中,完成基础的初始化配置工作后,紧接着就需要编写基本的发送和接收数据的函数了。
SPI通信也不例外,但稍有区别的是:
SPI通信是全双工,进行的是数据交换,发送1个字节,就要收到1个字节。
整个过程在上一章节已经分析过了,SPI外设收发处理一个字节数据的过程是这样的:
- 主机判断和等待TXE标志位置位,也就是等待发送数据寄存器为空。
- 在 TXE = 1 的前提下,主机将 1 个字节写入发送数据寄存器(TDR)
- 该1个字节的数据进入主机移位寄存器,被逐bit移除发送。
- 与此同时,从机也会逐bit发送数据,主机的移位寄存器也会同步接收这些bit数据。
- 等待主机接收数据寄存器非空,当主机接收数据寄存器非空时:
- 意味着主机已经将1个字节数据完全发给从机。
- 意味着从机已经将1个字节数据完全发给主机。
- 主机读接收数据寄存器。
如此一轮操作下来,主机就完成了发送1个字节数据,同时也收到1个字节数据。
此函数用于W25Q64内部逻辑实现,所以不需要将它暴露在外界,它不需要将声明写入头文件。
可以在源文件中实现它,并用static修饰函数。
下面我们再提供两个用于选中/取消选中W25Q64从机通信。
从机片选与取消片选函数
选中就是拉低CS,取消选中就是拉高CS。
这两个函数用于W25Q64内部逻辑实现,所以不需要将它们暴露在外界,它们不需要写入头文件。
可以在源文件中实现它们,并用static修饰它们的函数。
以上,所有的准备工作都搞定了,下一文中我们来学习一个W25Q64的使用,并完成相关实验。